基于联邦图网络的转子系统故障诊断方法
李晖, 陈银超, 孙绍山, 梁兆鑫, 毛刚, 乔彬, 李永波
航空学报
2024, 45 ( 17):
530611-530611.
DOI: 10.7527/S1000-6893.2024.30611
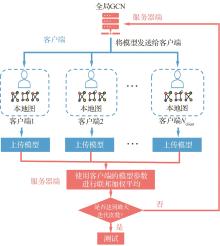
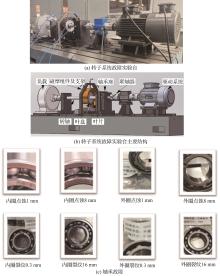
转子系统运行环境恶劣、多源监测数据融合困难且易产生数据孤岛现象,对转子系统健康监测带来巨大挑战。本文提出了基于遗传进化构图的联邦图卷积神经网络(FGCN)转子系统故障诊断方法。首先,利用联邦学习和图神经网络,构建联邦图网络框架,通过在每个本地客户端上进行局部模型训练,并通过联邦加权平均算法聚合这些局部模型得到全局模型,这种数据不动、模型动的方式,不仅实现了数据的本地化处理,还确保了模型参数的安全与隐私;此外,为了解决多源传感器数据融合自适应差的问题,提出了遗传进化构图方法,该方法通过模拟生物进化过程中的自然选择和遗传变异机制,在训练过程中自动调整图结构节点之间的连接关系和权重;极大地提高了多源传感器构图的自适应性和灵活性,进而提升故障诊断的准确性。最后,通过在转子故障实验台数据集上进行验证,实验结果表明,所提出的方法能够更充分利用多传感器监测数据,在客户端包含故障种类数量不同的诊断场景中达到了95%以上的故障诊断准确率。
View image in article
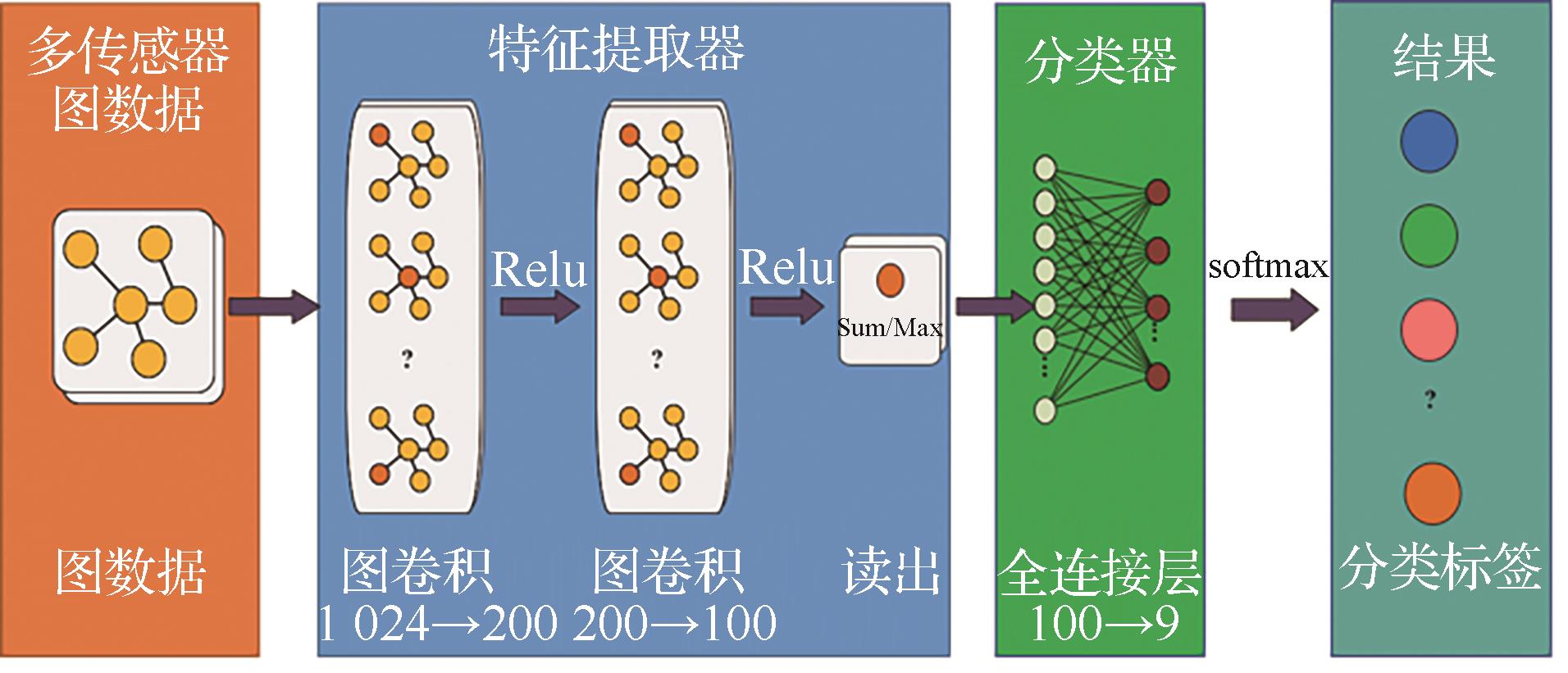
图 3
局部神经网络模型结构
正文中引用本图/表的段落
为了解决上述问题,本文提出了一种新的联邦图卷积神经网络(Federated Graph Convolutional Neural Networks,FGCN)模型,该模型根据多个传感器之间的互补性和传感器的数据特点进行动态聚合,从而提高故障诊断的准确率。提出的FGCN模型创新性体现在以下3个方面:
式中:是大小为的节点的集合,每个节点表示图中的一个个体;E是大小为的边的集合,每条边表示节点之间的关系或连接,节点的个数m也成为图G的阶数。
图也可以用矩阵形式表示,即图的邻接矩阵(Adjacency Matrix),对于无向图,邻接矩阵是对称的,对应的邻接矩阵如式(2)所示:
式中:邻接矩阵的第i行第j列的标量元素表示节点和节点的连接关系。如果节点和节点之间存在连接关系即有边,则,如果不存在边,则。无向图中。特别地,如果边是有权重的,则的值可以是权重的值。
度(Degree)是图中描述节点(或顶点)连接性质的重要概念[18]。在无向图中,节点的度是指与该节点相连的边的数量。对于节点 i,其度记为 deg(i)。在有向图中,节点的度分为出度(Out-degree)和入度(In-degree)。节点的出度是指从该节点出发的边的数量,入度是指指向该节点的边的数量。对于节点 i,其出度记为 outdeg(i),入度记为 indeg(i)。节点vi 的度di 可以用图G的邻接矩阵计算,即将邻接矩阵的每一行加和在矩阵的对角线上。计算得到的矩阵称为度矩阵,用D表示。计算公式如式(3):
变异:对个体的每张图进行遍历,如果随机数小于等于变异概率,则进行变异操作;
在联邦学习的每一轮训练中,该模型会在每个客户端内进行局部更新,优化目标为最小化分类损失。所有客户端和服务器共享的深度神经网络模型架构如图3所示,分为特征提取器和分类器2个模块。为了减少通信负担,本研究使用了结构简单的小型模型进行联邦学习。
4) GNN模型训练:搭建故障诊断模型结构M和初始化网络参数,将构建好的图数据输入到基于GCN的故障诊断模型中进行训练,模型结构如图3所示。该模型能够在保留节点间结构信息的同时,对节点进行特征的聚合和表示学习,从而实现对故障诊断的有效表征。
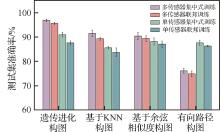
对于基于遗传进化、KNN以及余弦相似度构图,利用多传感器数据进行故障诊断的准确率均高于单传感器数据。这表明这3种构图方法能够有效地提取多传感器中的故障特征信息,并充分利用多传感器数据的协同优势进行诊断。然而,基于有向路径构图的方法在多传感器数据上的诊断效果反而低于单传感器数据。这可能是因为在缺乏先验知识的情况下,有向路径构图方法难以确定最佳参数,无法充分体现多传感器的连接关系,反而引入了信息冗余,导致诊断准确性下降。这进一步说明了多传感器的数据融合对构图方法的适应性和泛化能力具有较高的要求。而在多传感器数据的训练诊断中,基于KNN和余弦相似度的构图方法的诊断效果均低于遗传进化构图方法。遗传进化构图方法的准确率高出KNN和余弦相似度的构图方法4.51%以上,这再次突显了本文所提出的构图方法所具备的卓越自适应能力。
本文的其它图/表
|




{kind=link}