张良阳, 李占科( ), 韩海洋
), 韩海洋
收稿日期:2022-06-04
修回日期:2022-06-27
接受日期:2022-07-29
出版日期:2023-06-25
发布日期:2022-08-03
通讯作者:
李占科
E-mail:lzk@nwpu.edu.cn
基金资助:
Liangyang ZHANG, Zhanke LI(), Haiyang HAN
Received:2022-06-04
Revised:2022-06-27
Accepted:2022-07-29
Online:2023-06-25
Published:2022-08-03
Contact:
Zhanke LI
E-mail:lzk@nwpu.edu.cn
Supported by:摘要:
微型无人机栖息设计研究对提升微型无人机续航、增强微型无人机环境适应性和提高微型无人机长时间侦察监视能力具有重要的意义。随着人们对微型无人机续航性能和复杂环境的适应性要求越来越高,科研工作者对微型无人机的栖息设计技术进行了深入研究,并取得了显著成果。主要梳理了微型无人机的栖息原理、栖息机构、栖息方法,分析了栖息机构的特点与发展趋势。同时介绍了变体无人机在栖息领域的研究,并阐述了无人机栖息与抓取和爬壁之间的联系。此外将无人机分为多旋翼和固定翼2大类来进行栖息方法的研究分析,内容主要包括无人机的栖息位置选择、基于时间接触理论的仿生轨迹设计、视觉栖息导航、无人机的气动分析和动力学建模以及相应的栖落机动控制等。通过对无人机栖息设计技术的研究归纳分析,可为后续从事该方面的研究人员提供参考和借鉴。
中图分类号:
张良阳, 李占科, 韩海洋. 微型无人机栖息设计技术综述[J]. 航空学报, 2023, 44(12): 27573.
Liangyang ZHANG, Zhanke LI, Haiyang HAN. A review of perching technology of micro⁃UAV[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(12): 27573.
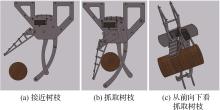
图 1
富兰克林·欧林工程学院机械抓扣机构[5]
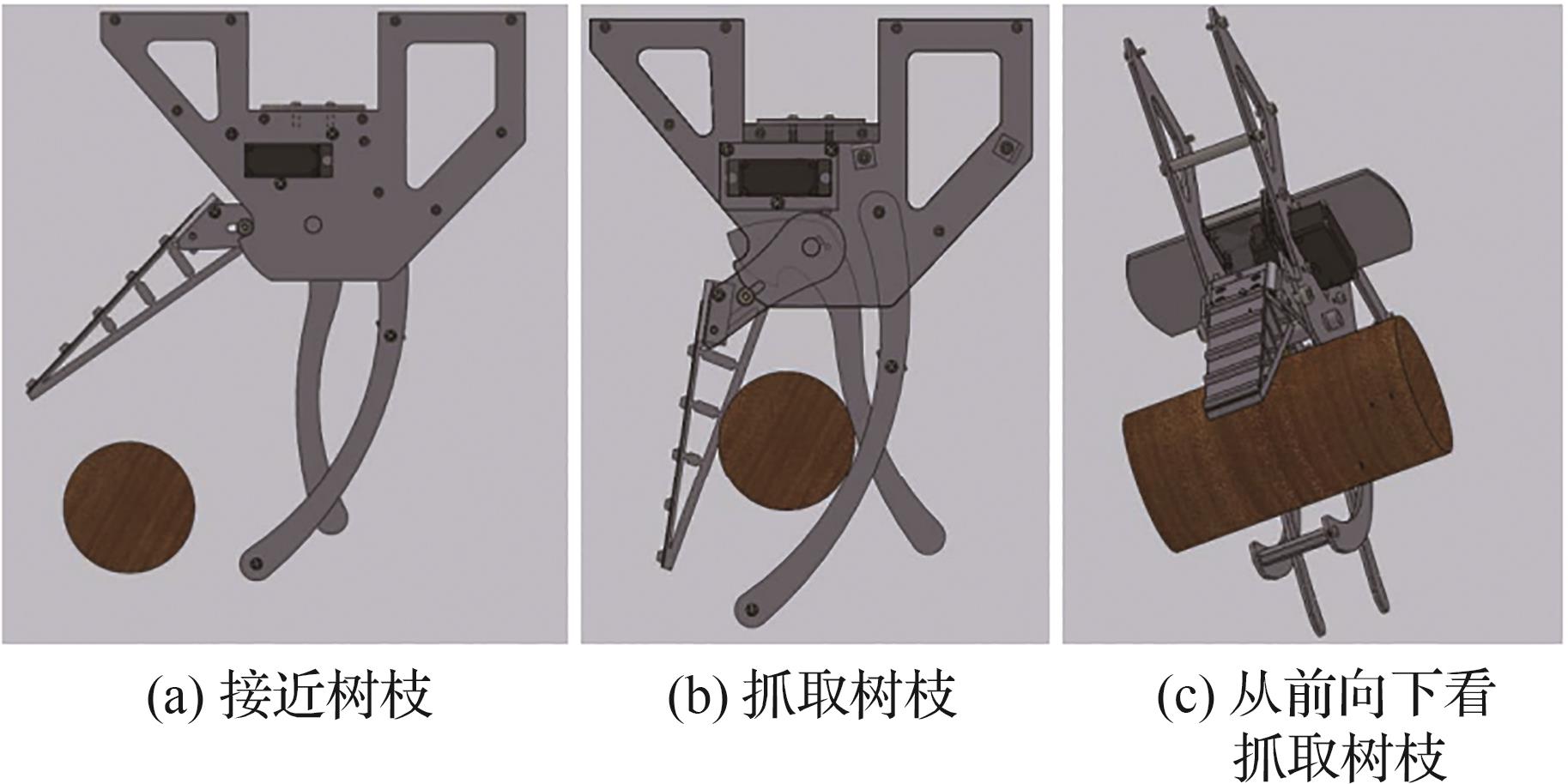

图 2
南安普敦大学机械抓扣机构[6]

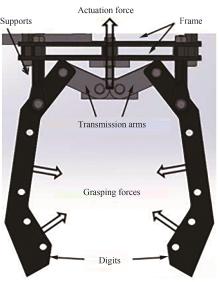
图 3
南洋理工大学机械抓扣机构[7-8]

图 4
中国石油大学(华东)机械抓扣机构[9]


图 5
泰勒大学机械抓扣机构[10]


图 6
奥克兰大学机械抓扣机构[11]

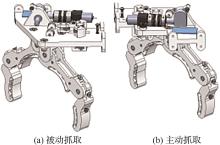
图 7
约翰·霍普金斯大学机械抓扣机构[12]
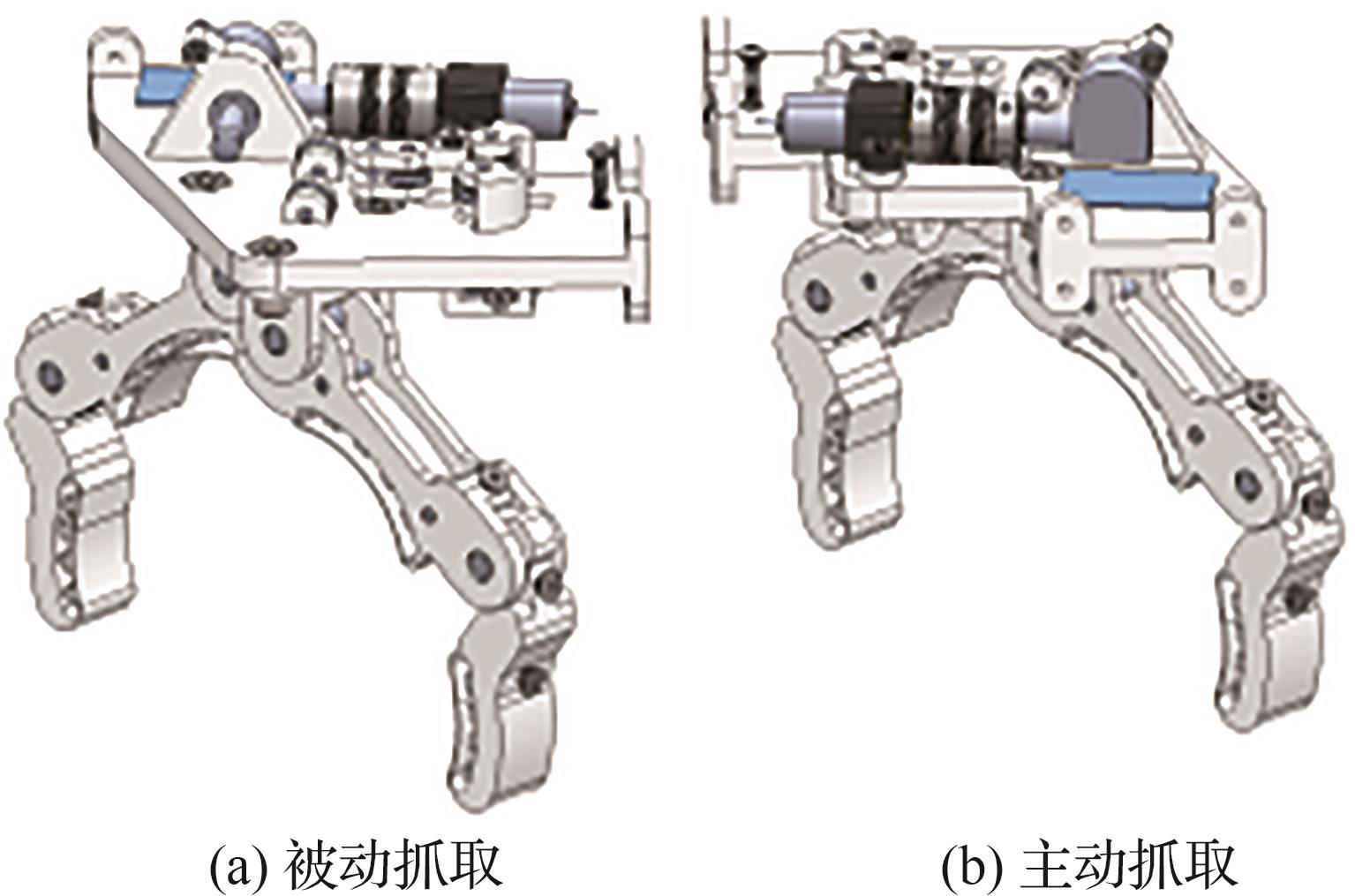
图 8
耶鲁大学的模块化起落架机构[13]


图 9
科罗拉多州立大学机械抓扣机构[14]


图 10
科罗拉多州立大学新型新稳态机械抓扣机构[15]

图 11
悉尼大学的柔性机械抓取机构[16]
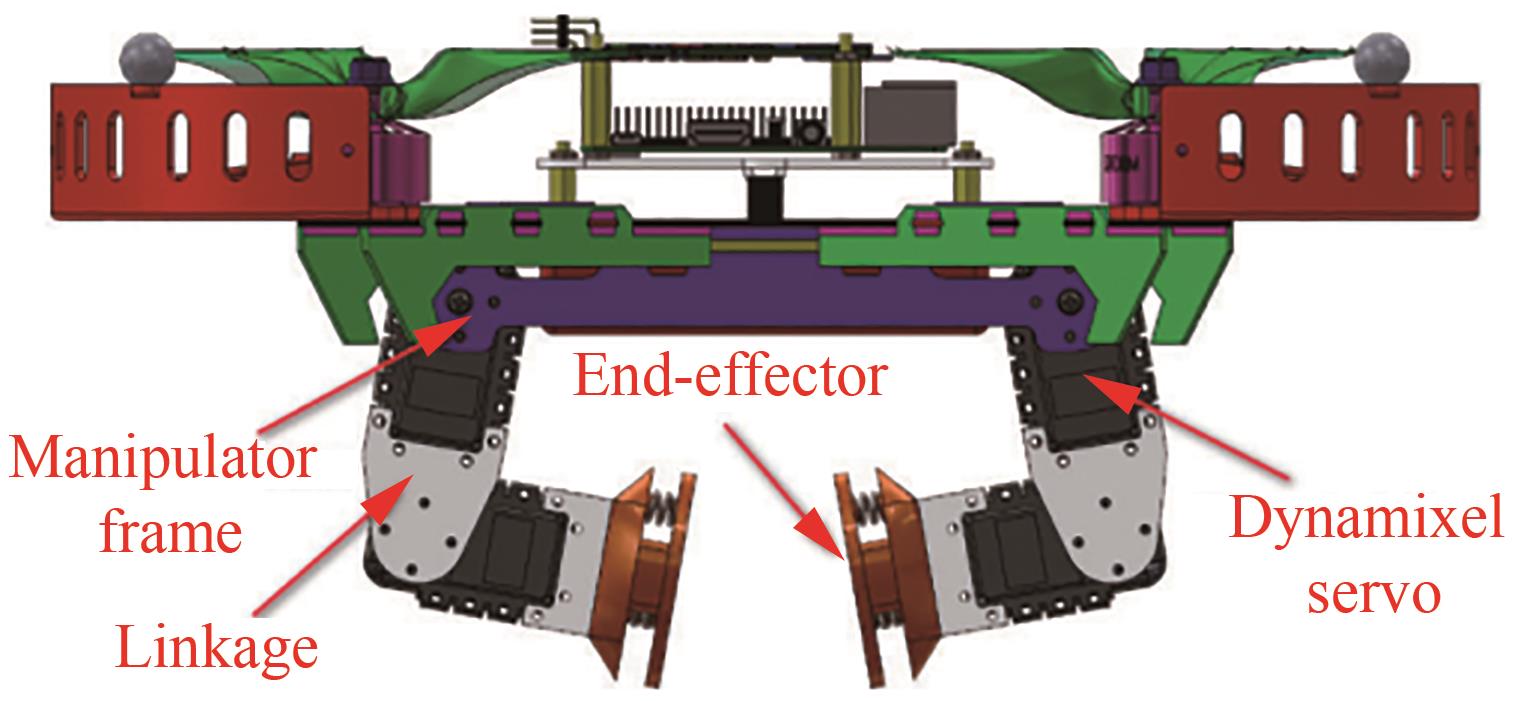

图 12
犹他大学机械抓扣机构[17]


图 13
阿卜杜勒·拉赫曼·新月会科学技术研究所机械抓取机构[18]


图 14
洛桑联邦理工学院智能系统试验室栖息机构[19]
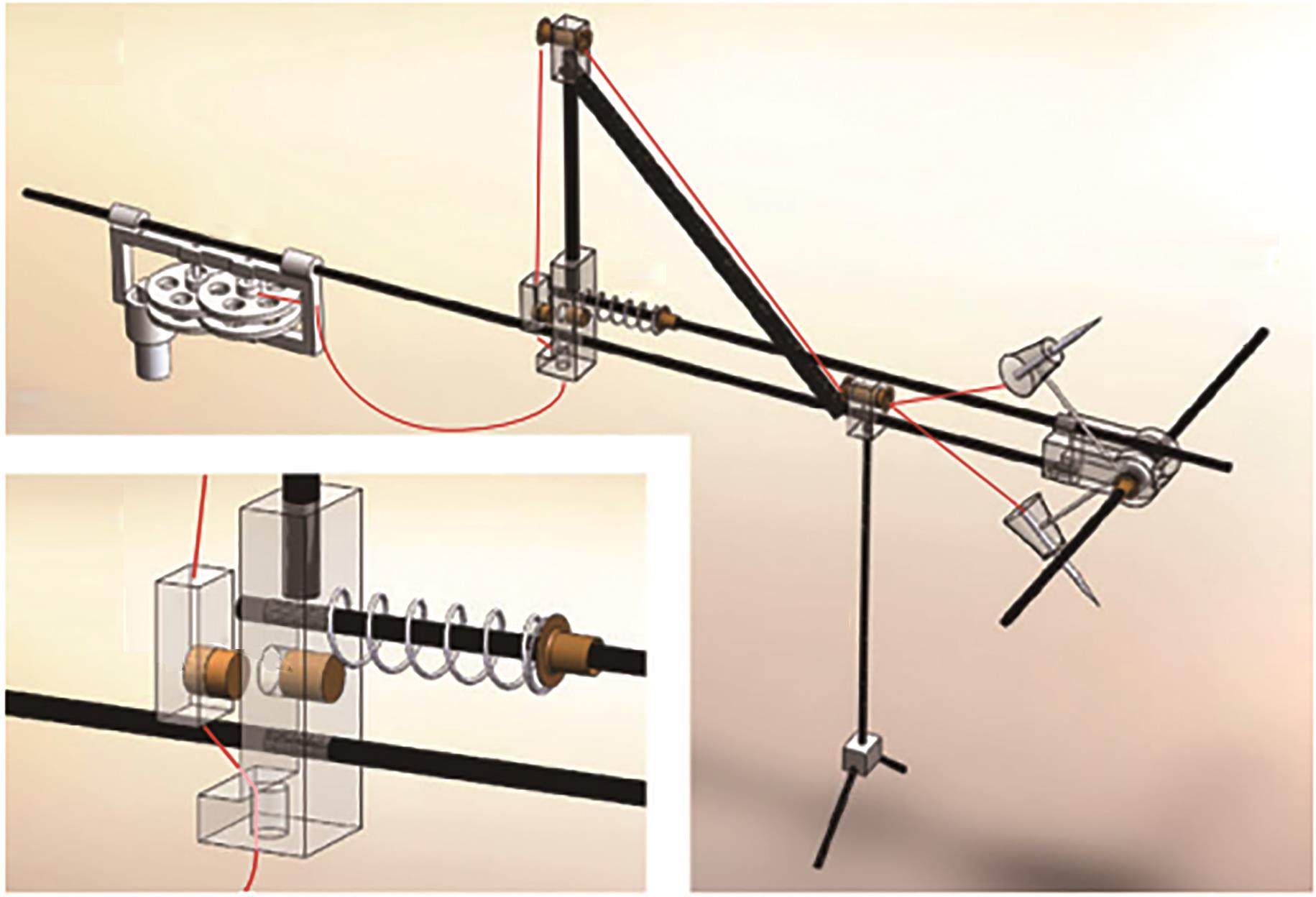

图 15
洛桑联邦理工学院工程学院机械抓扣机构[20]


图 16
耶鲁大学工程与应用科学学院机械抓扣机构[21]
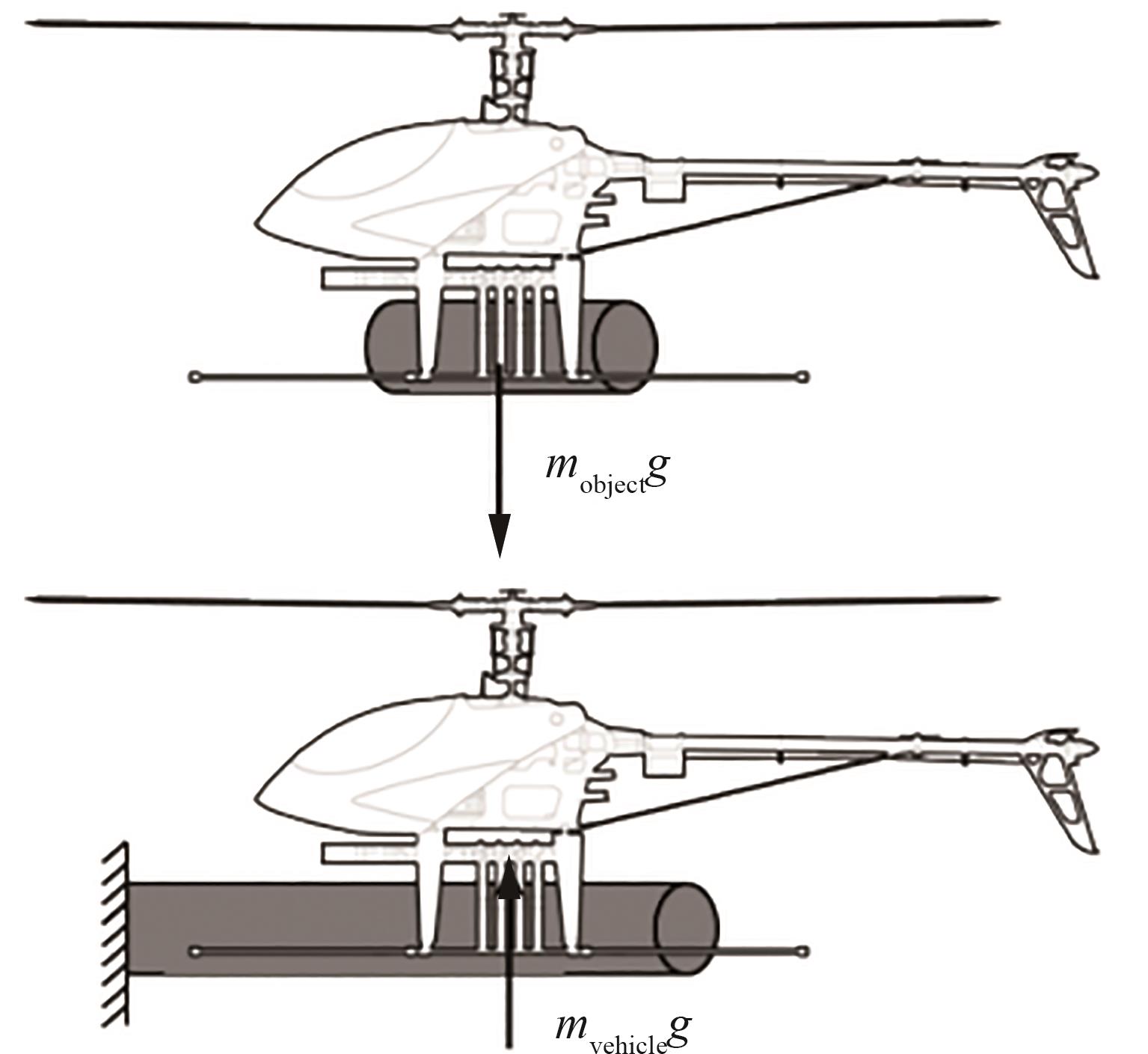

图 17
曼彻斯特大学仿生机械腿[22]
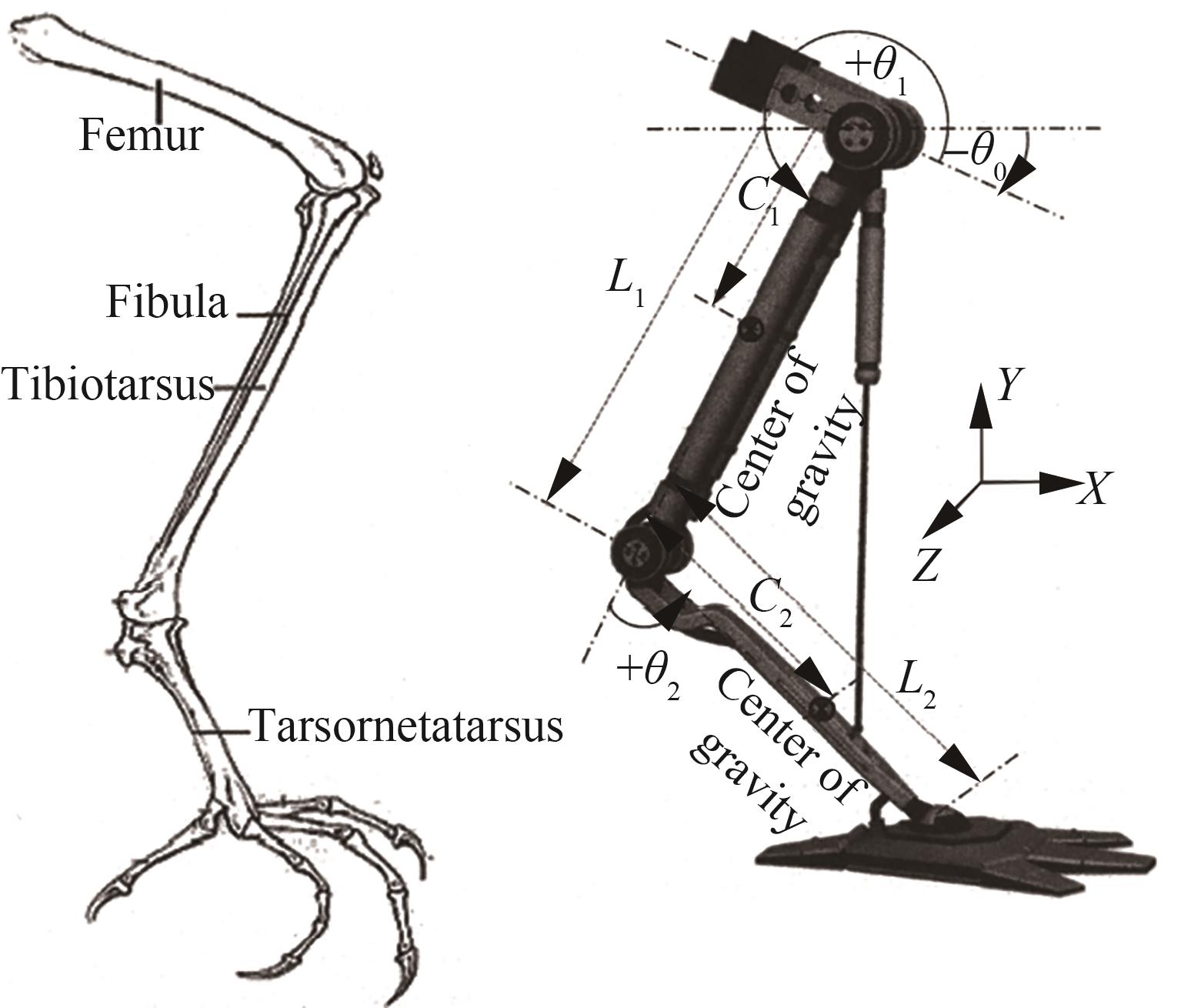

图 18
南洋理工大学机械与航空工程学院仿生机械爪 [23]
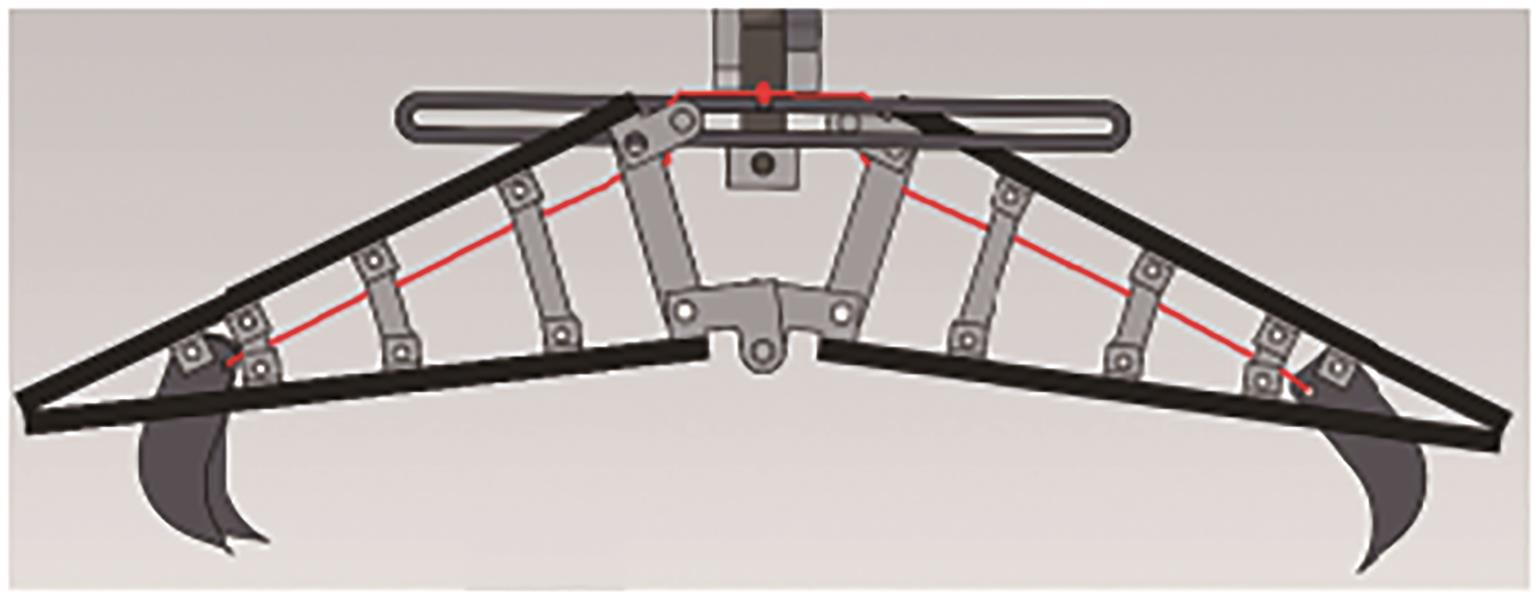

图 19
犹他大学仿生机械抓扣机构[24]

图 20
新墨西哥州立大学仿生机械抓扣机构[25]
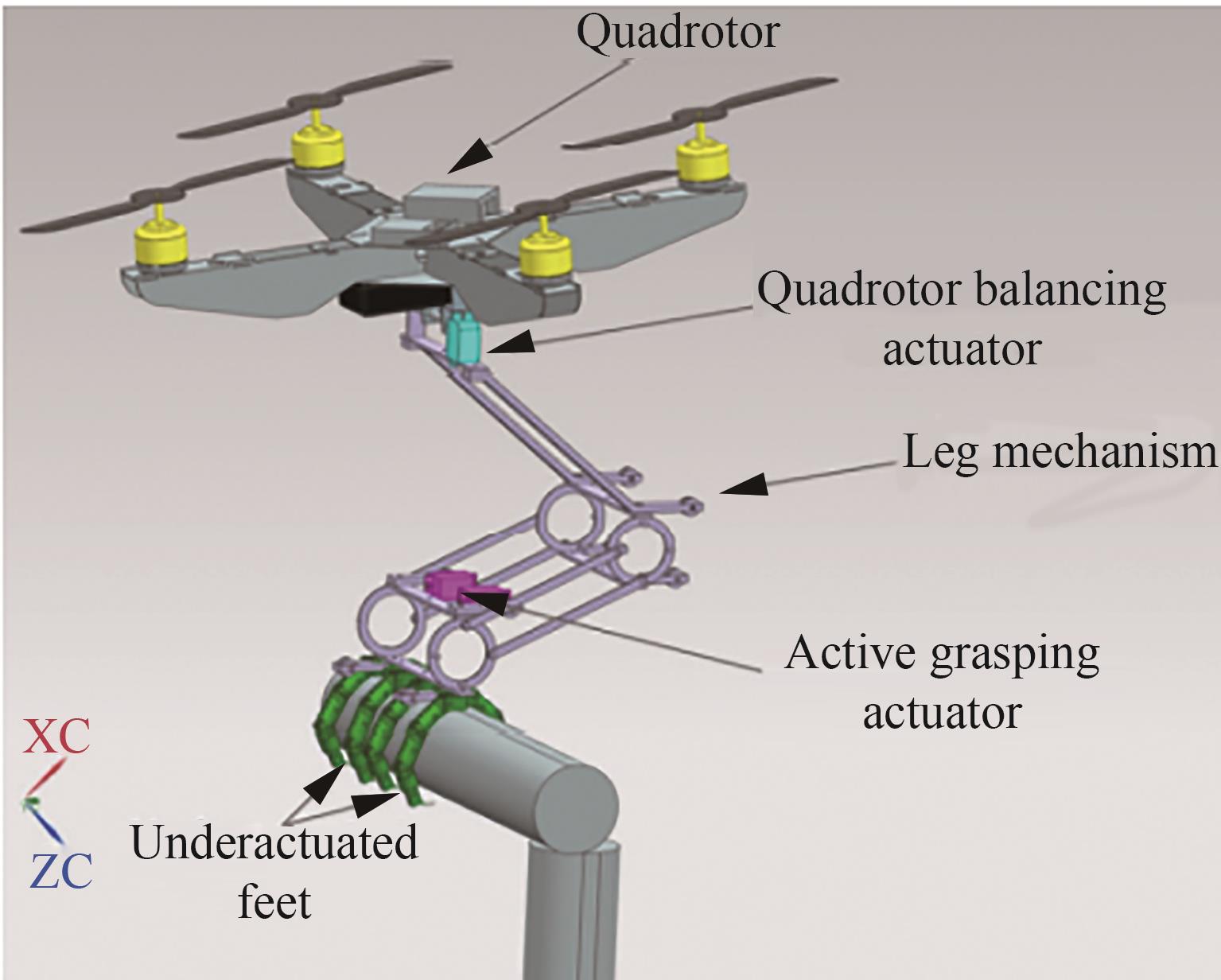

图 21
奥林工程学院仿生机械腿[26-27]


图 22
奥克兰大学新灵巧研究小组仿生机械爪[28]
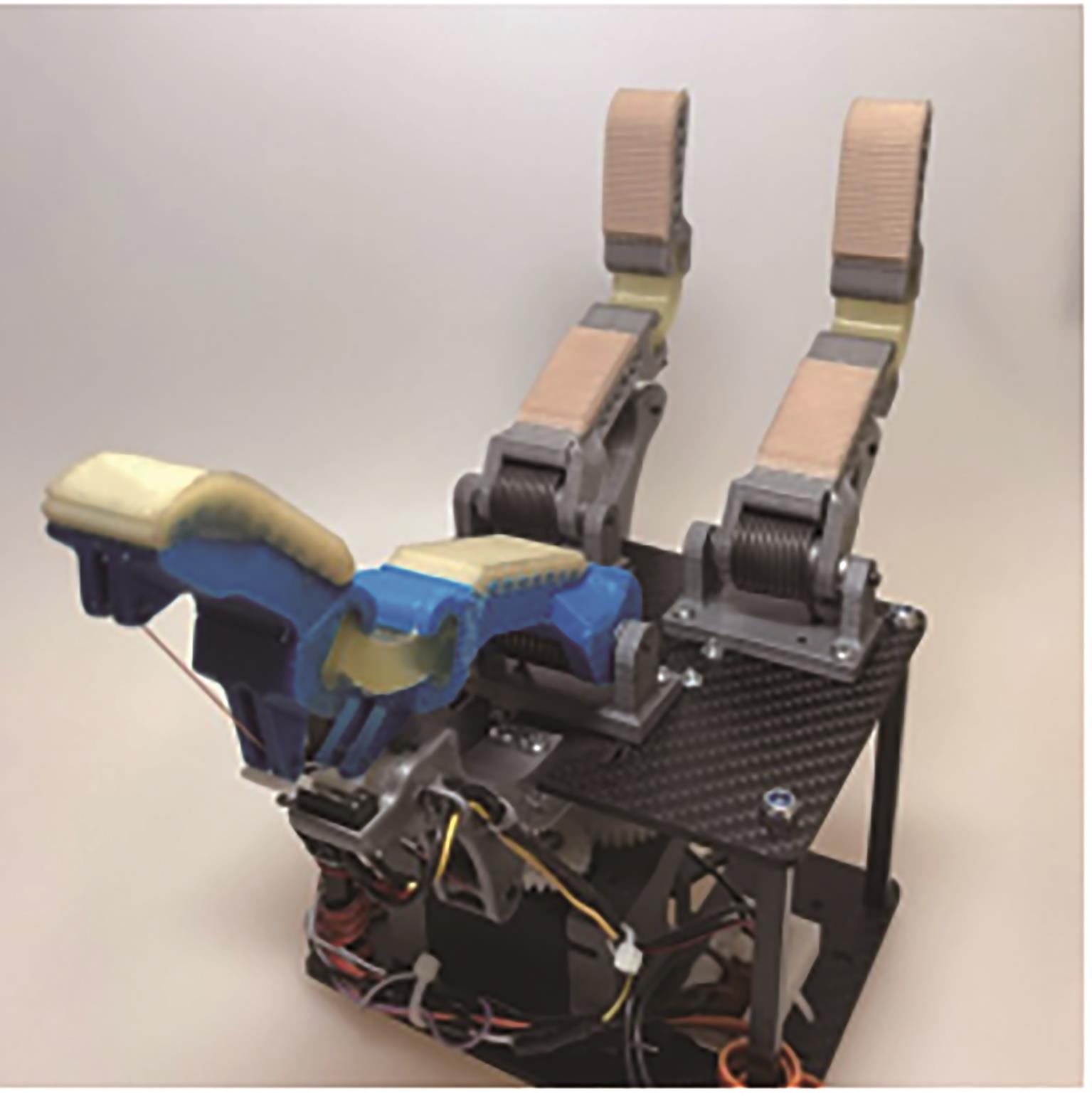
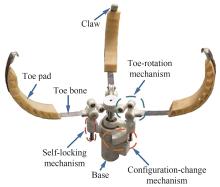
图 23
重庆大学机械传动国家重点试验室仿生机械抓扣机构[29]


图 24
斯坦福大学机械工程系机械抓扣机构[30]

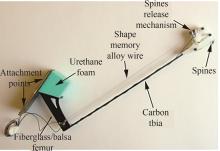
图 25
斯坦福大学仿生脚[34-37]


图 26
佛罗里达州立大学工程学院仿生针刺机构[38]
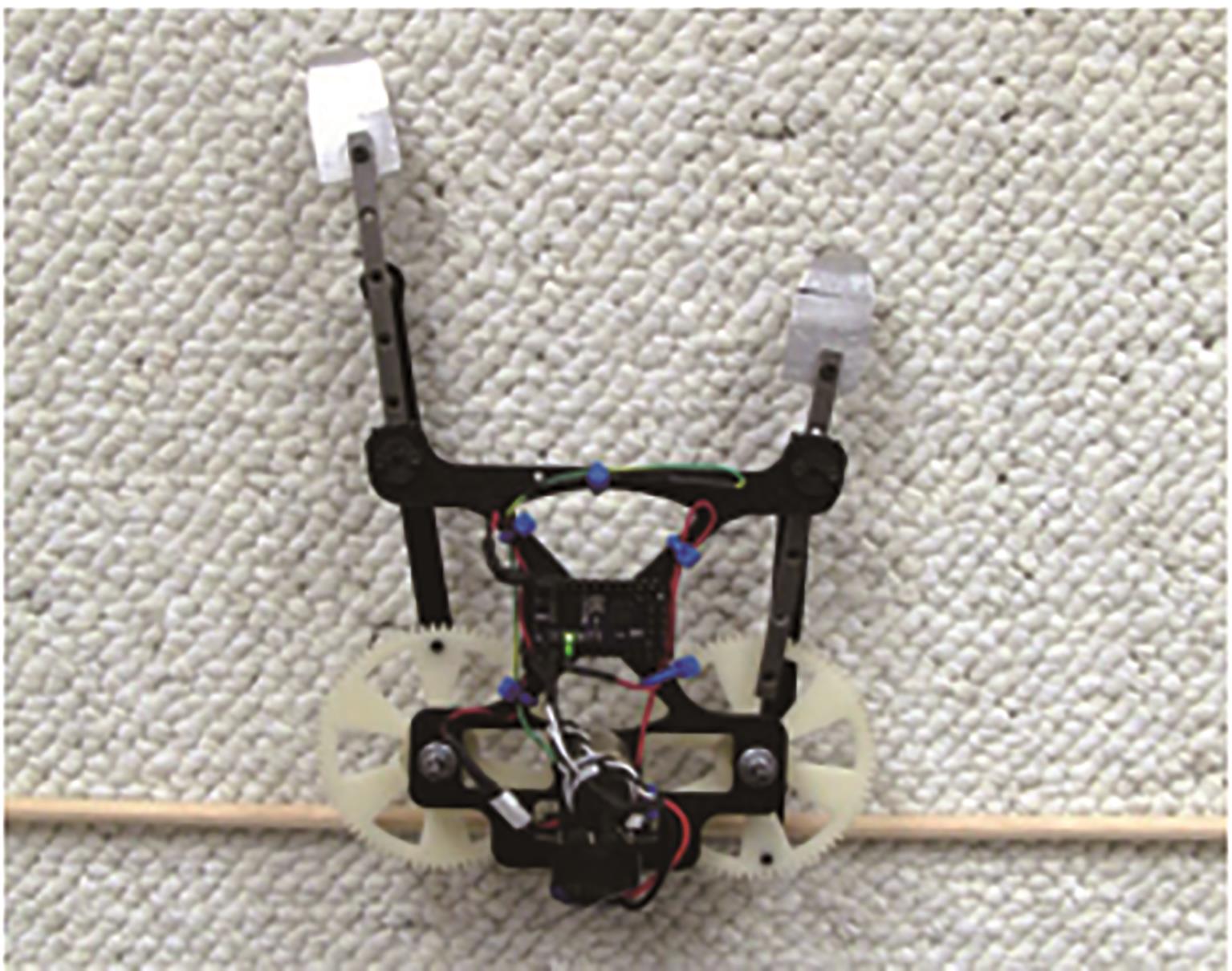

图 27
舍布鲁克大学机械抓扣机构[39-40]
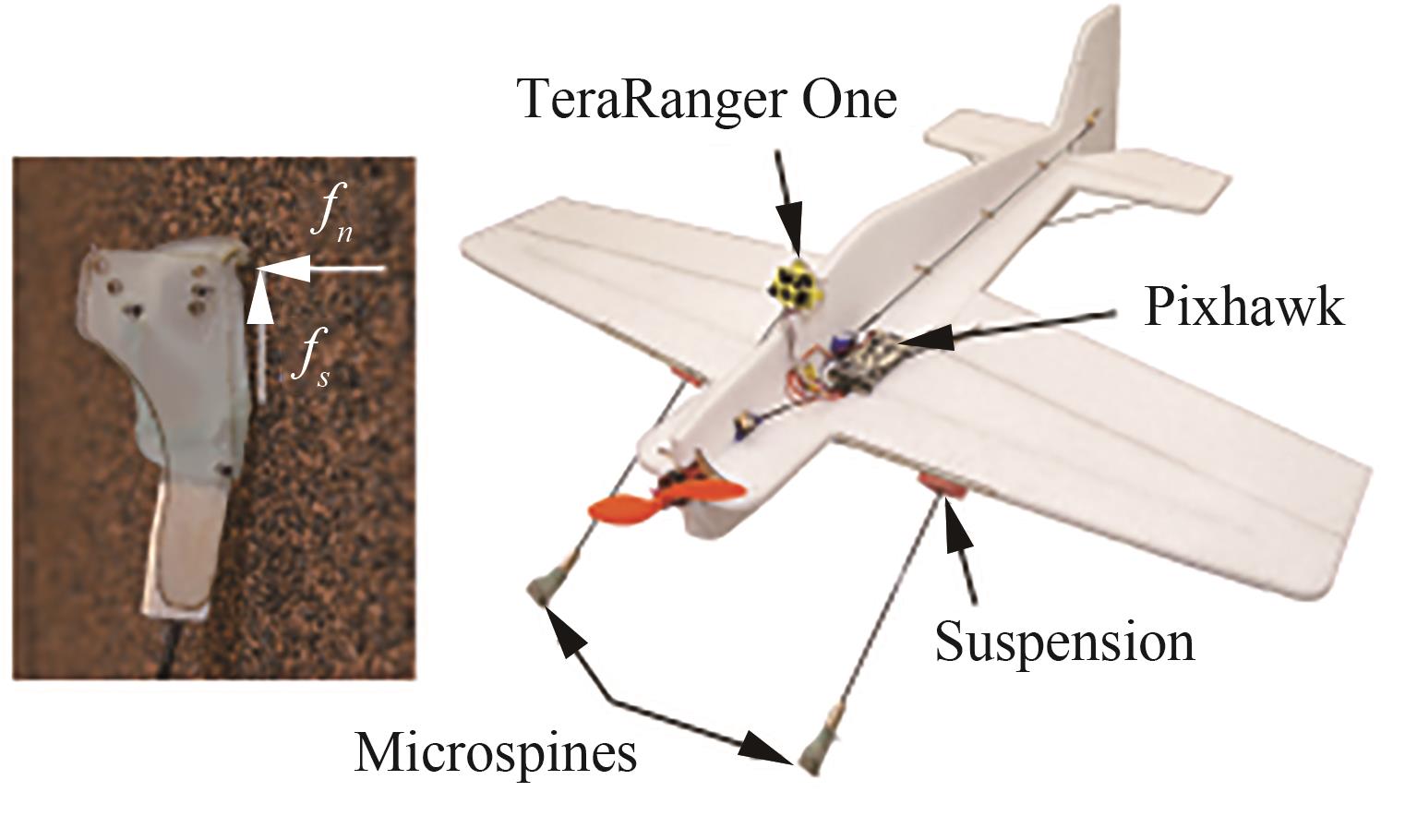

图 28
斯坦福大学仿生学和灵巧操作试验室仿生脚[41-42]


图 29
伦敦帝国学院仿生针刺机构[43]

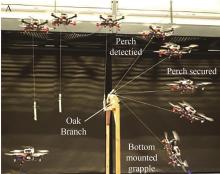
图 30
伦敦帝国学院空中机器人试验室机械抓扣机构[44]
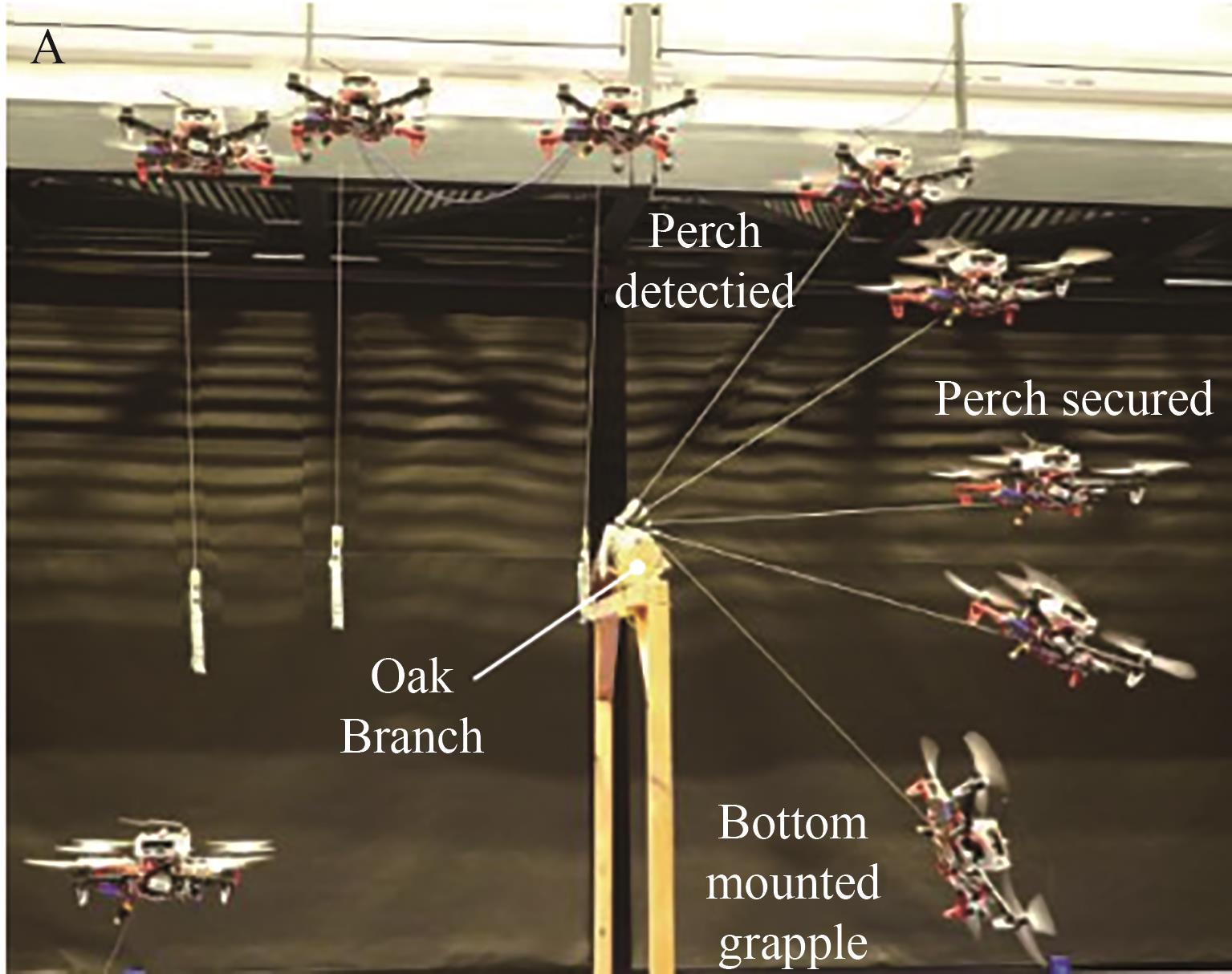

图 31
加州理工学院喷气推进试验室机械抓扣机构[45]
图 32
南京理工大学计算机科学与技术系负压吸盘[46]


图 33
特温特大学负压吸盘[47]


图 34
日本高级科学技术研究所信息科学学院负压吸盘[48]
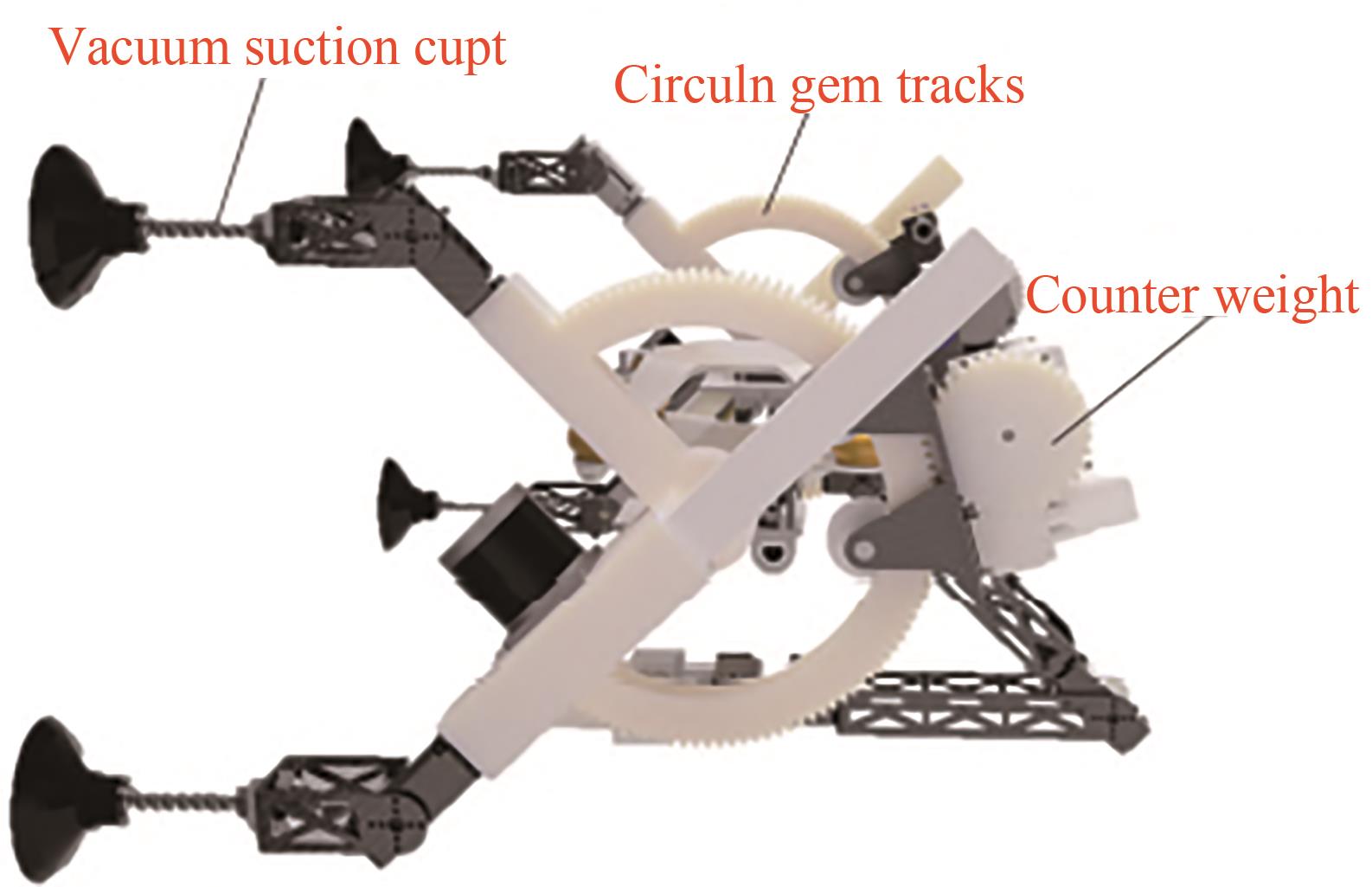

图 35
上海交通大学机械与工程学院负压吸盘[49-50]

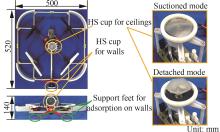
图 36
东京工业大学系统与控制工程系负压吸盘[51]
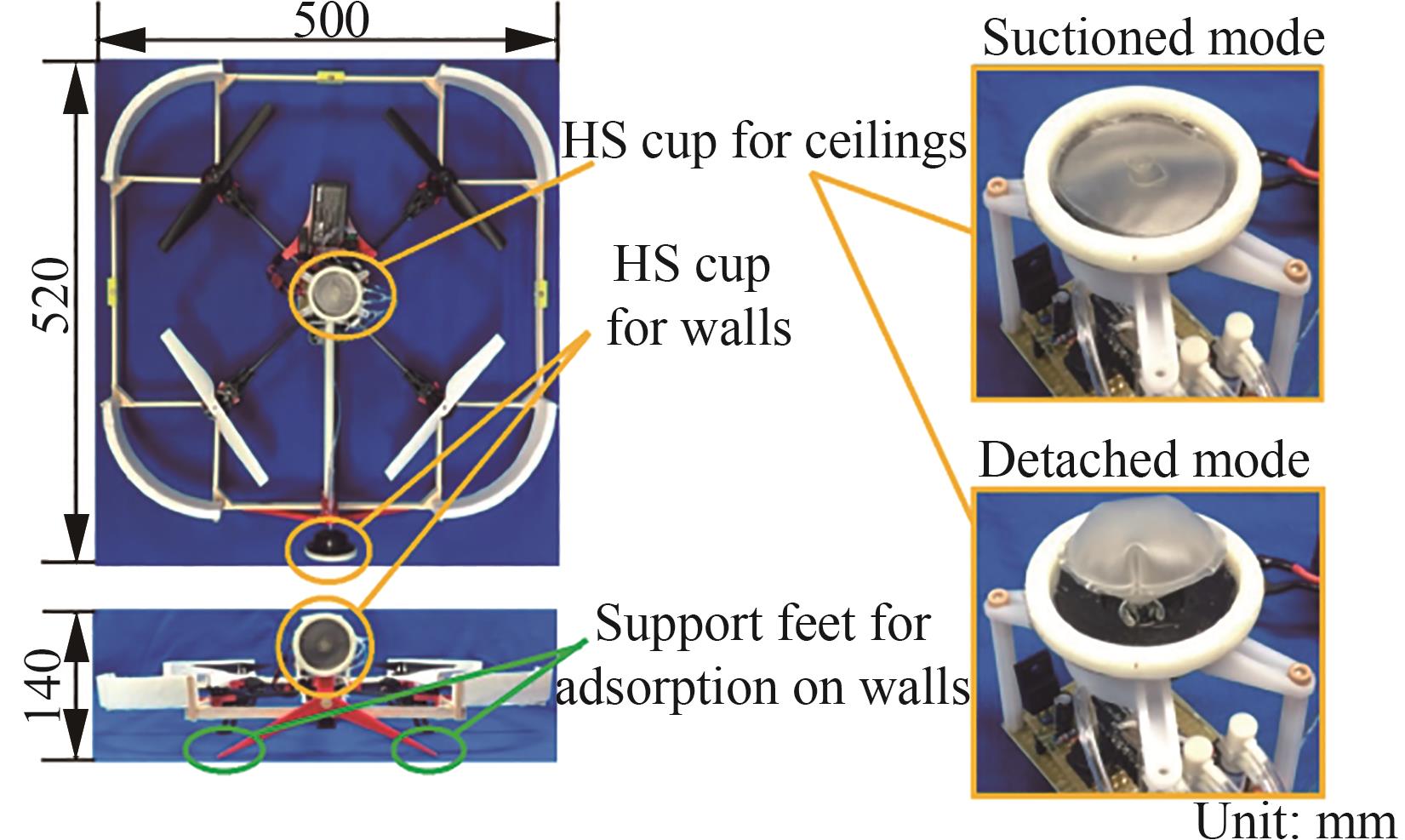
图 37
北京航空航天大学机械工程与自动化学院机器人研究所爬壁无人机[53-54]
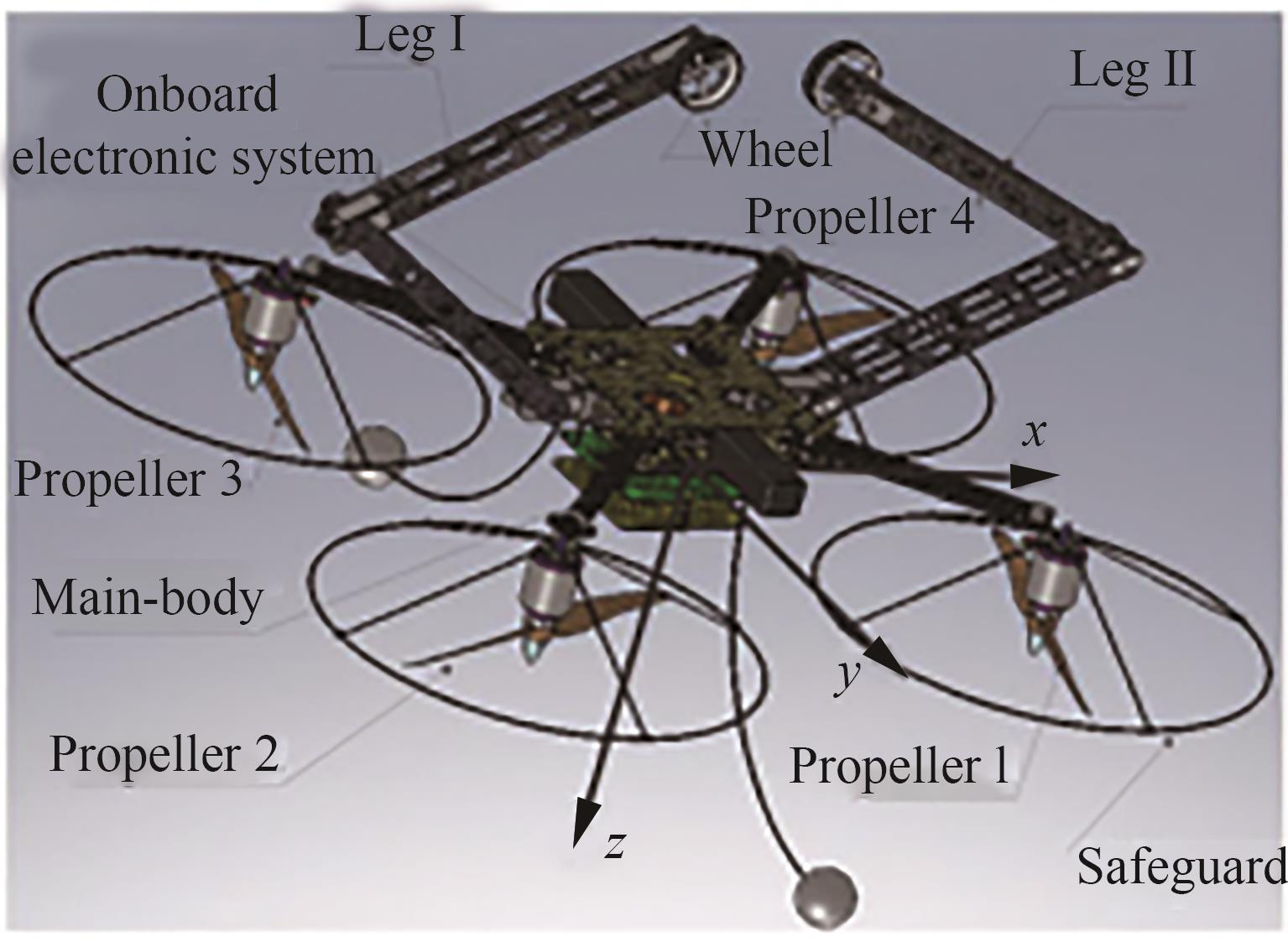
图 38
韩国科学技术研究院Shin等爬壁无人机[55]
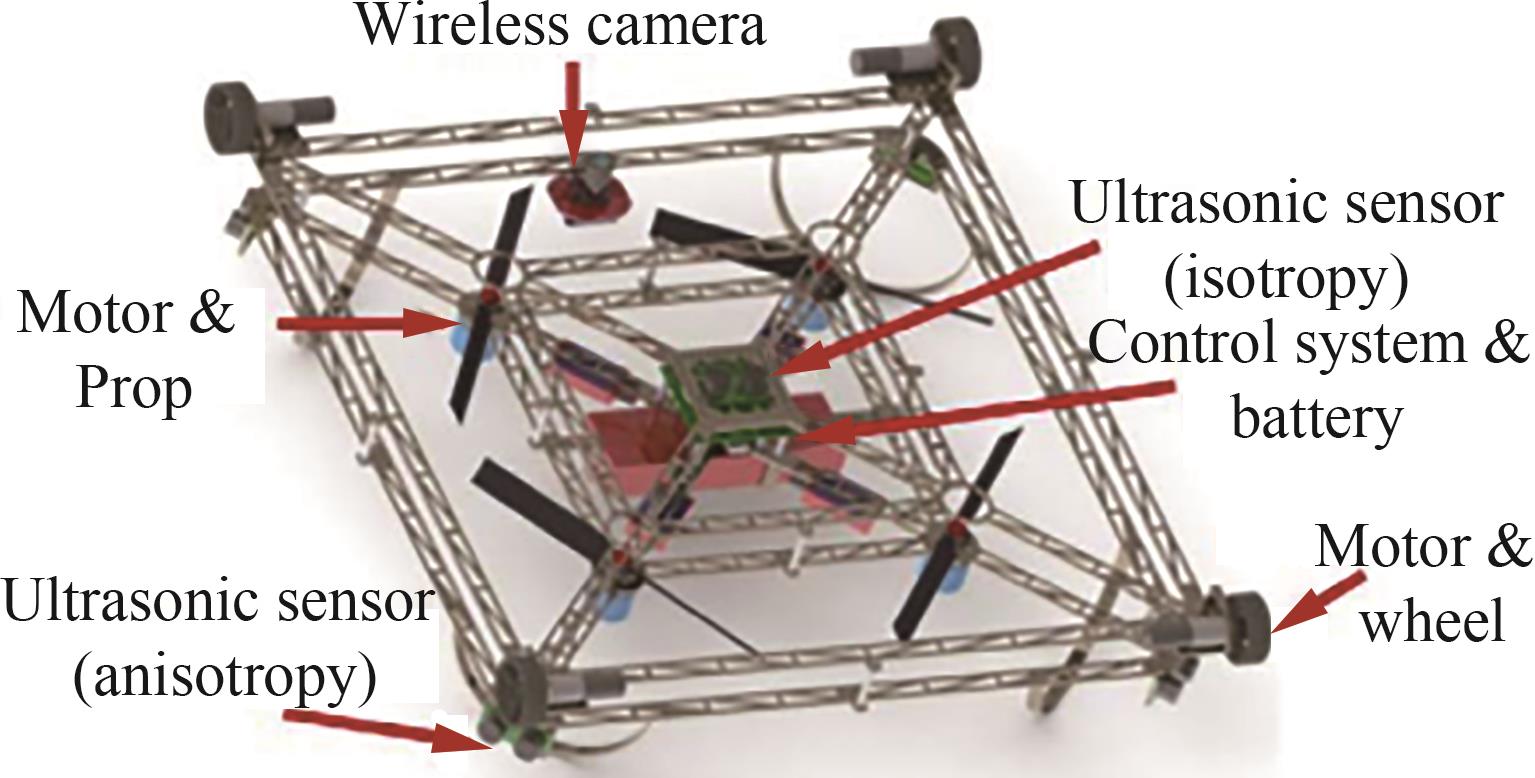

图 39
韩国科学技术院土木与环境工程系爬壁无人机[56-57]
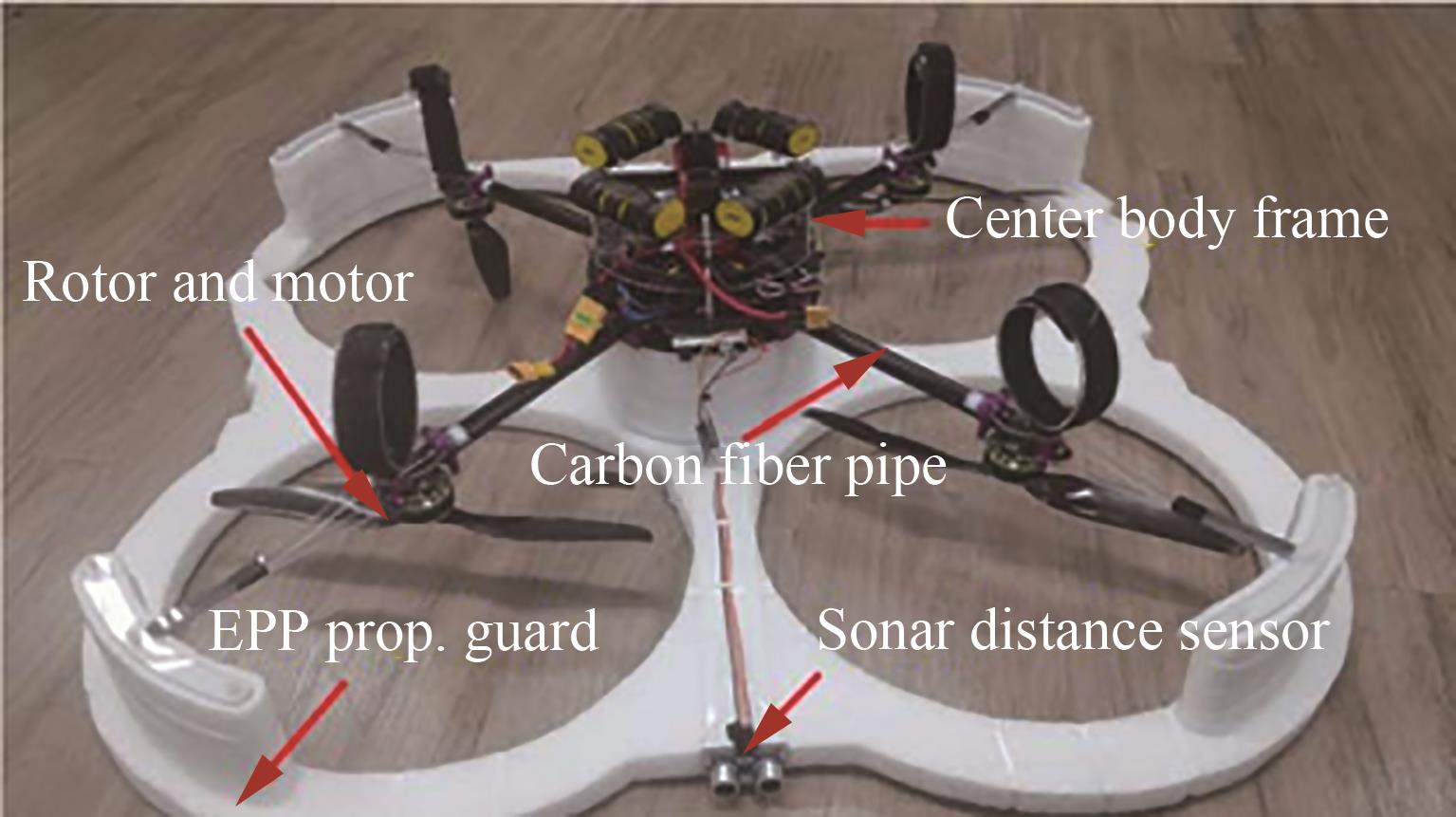

图 40
日本富士通有限公司爬壁无人机[58]
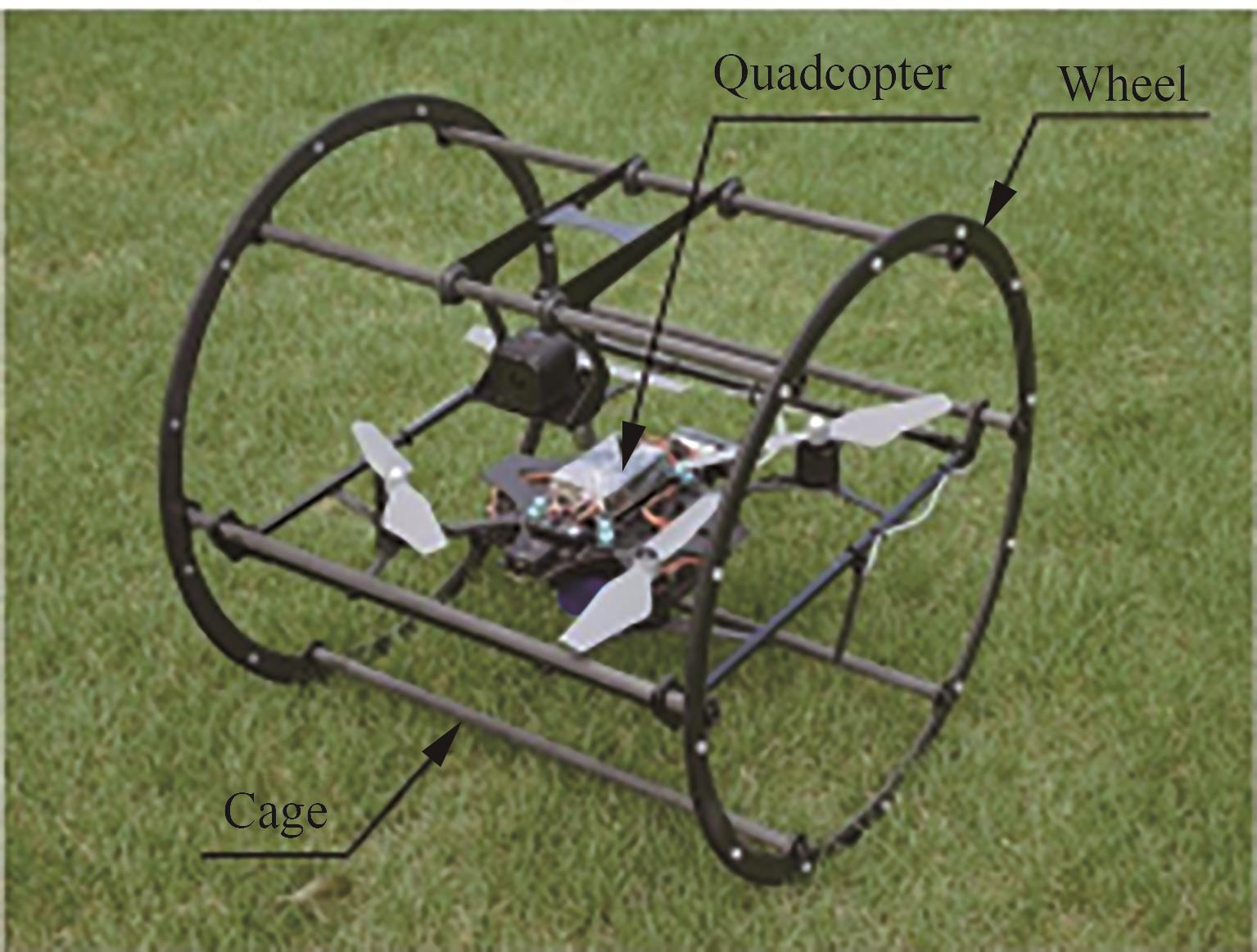

图 41
日本国立理工学院爬壁无人机[59]
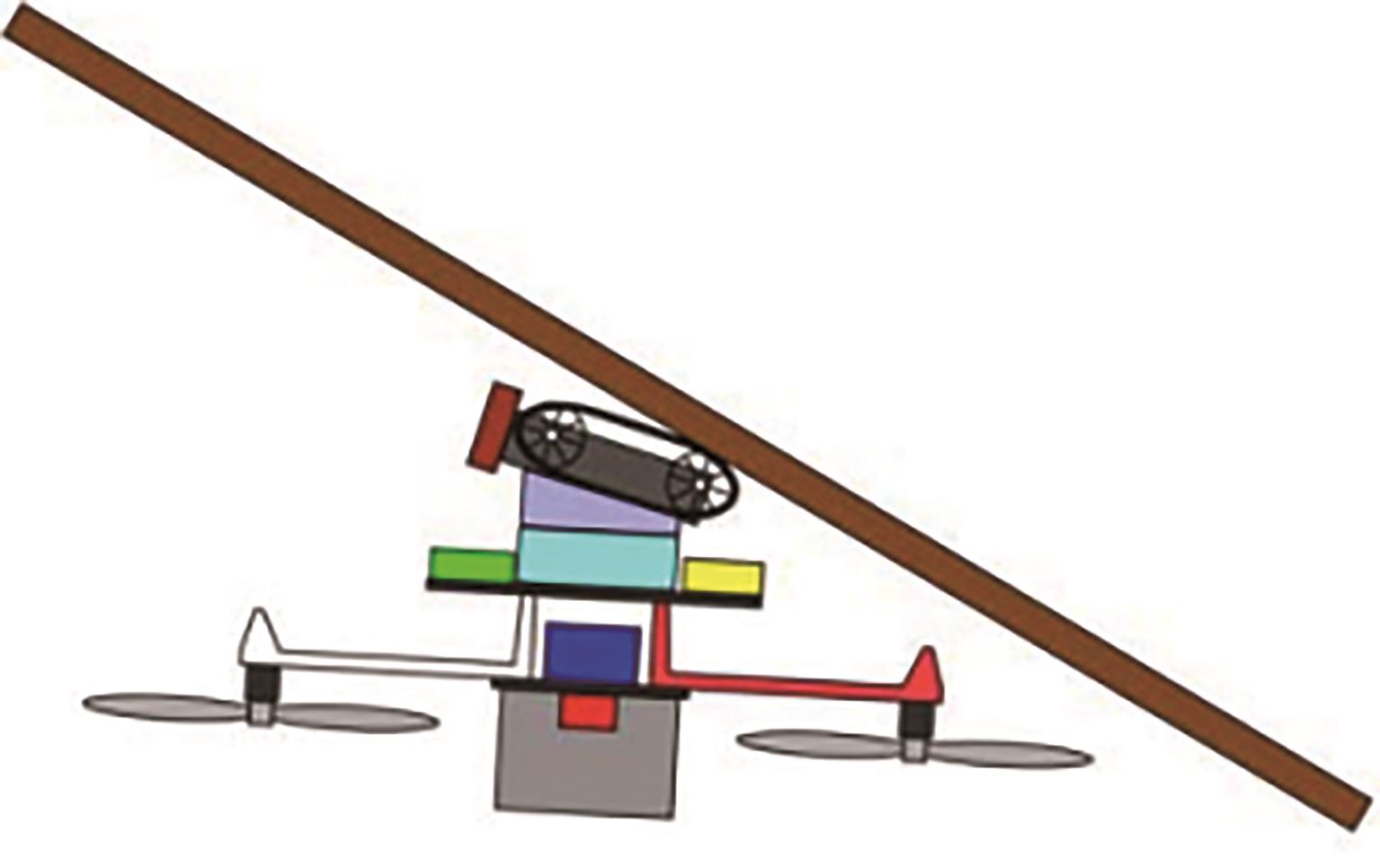
图 42
韩国科学技术院Jung等爬壁无人机[60]

图 43
早稻田大学理工系爬壁无人机[61]


图 44
韩国科学技术院土木与环境工程系新型爬壁无人机[62]
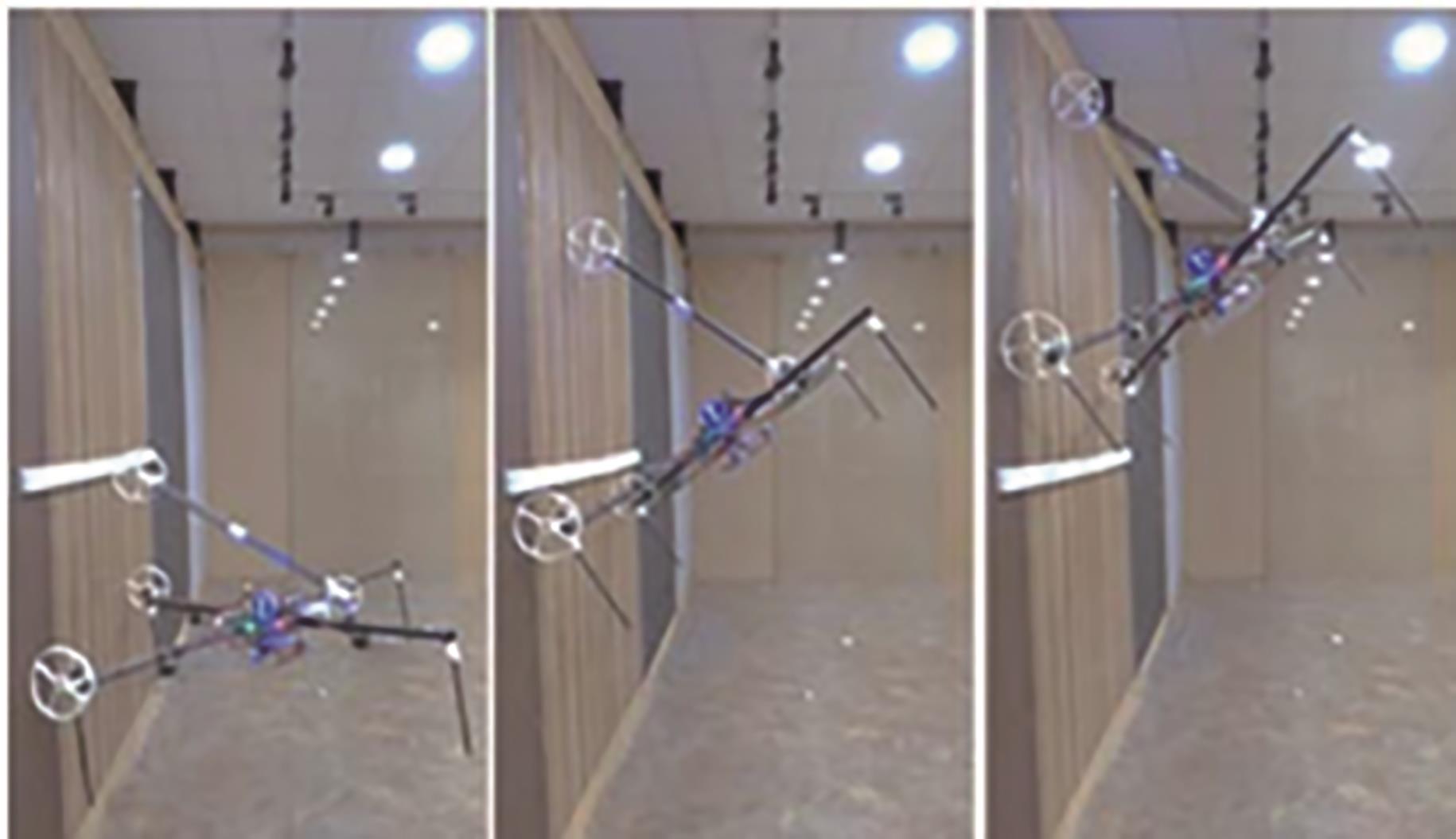

图 45
冈山大学自然科学技术研究生院爬壁无人机[63]
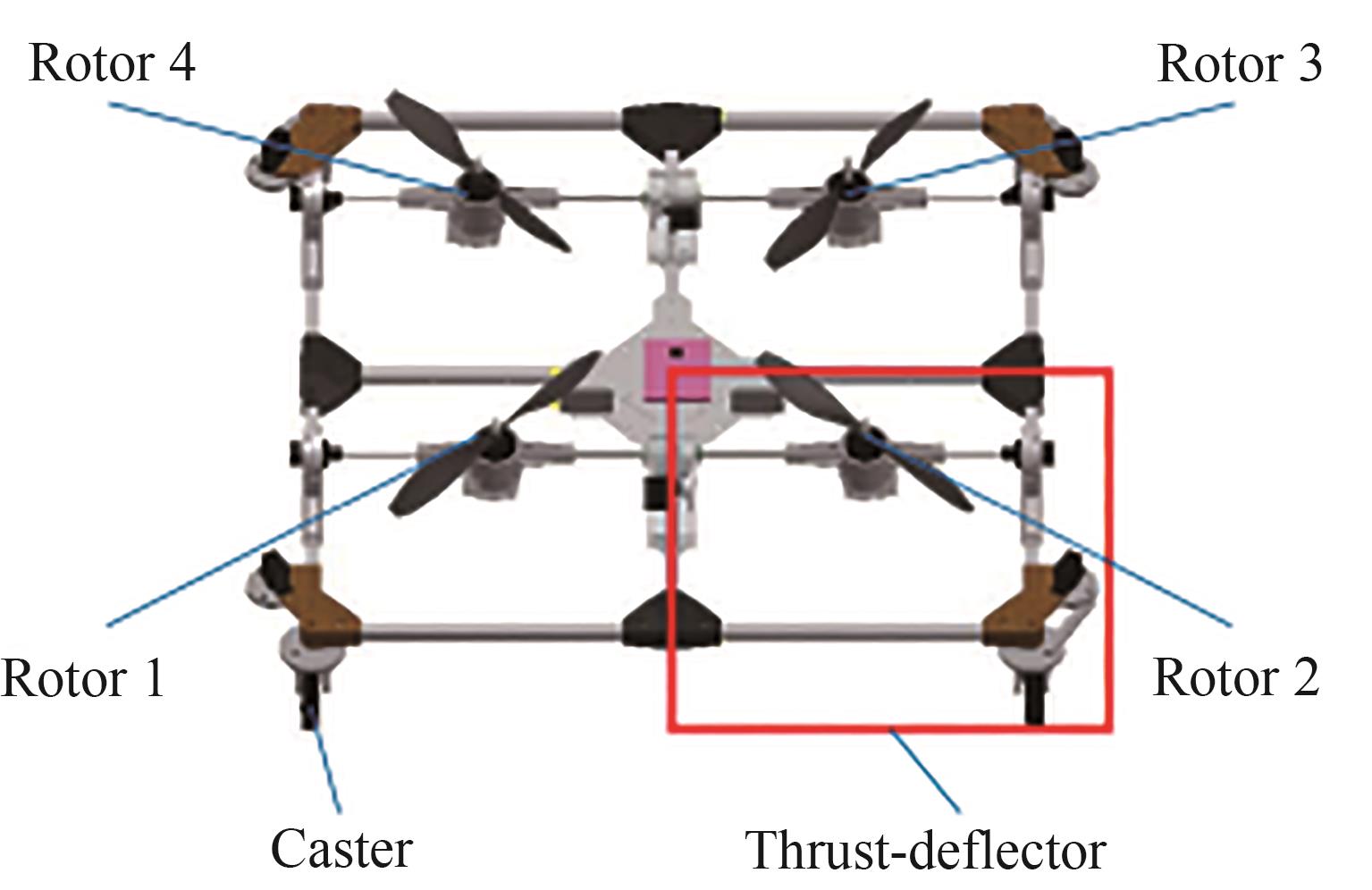
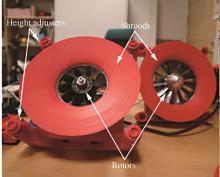
图 46
吕勒奥理工大学爬壁无人机[64]
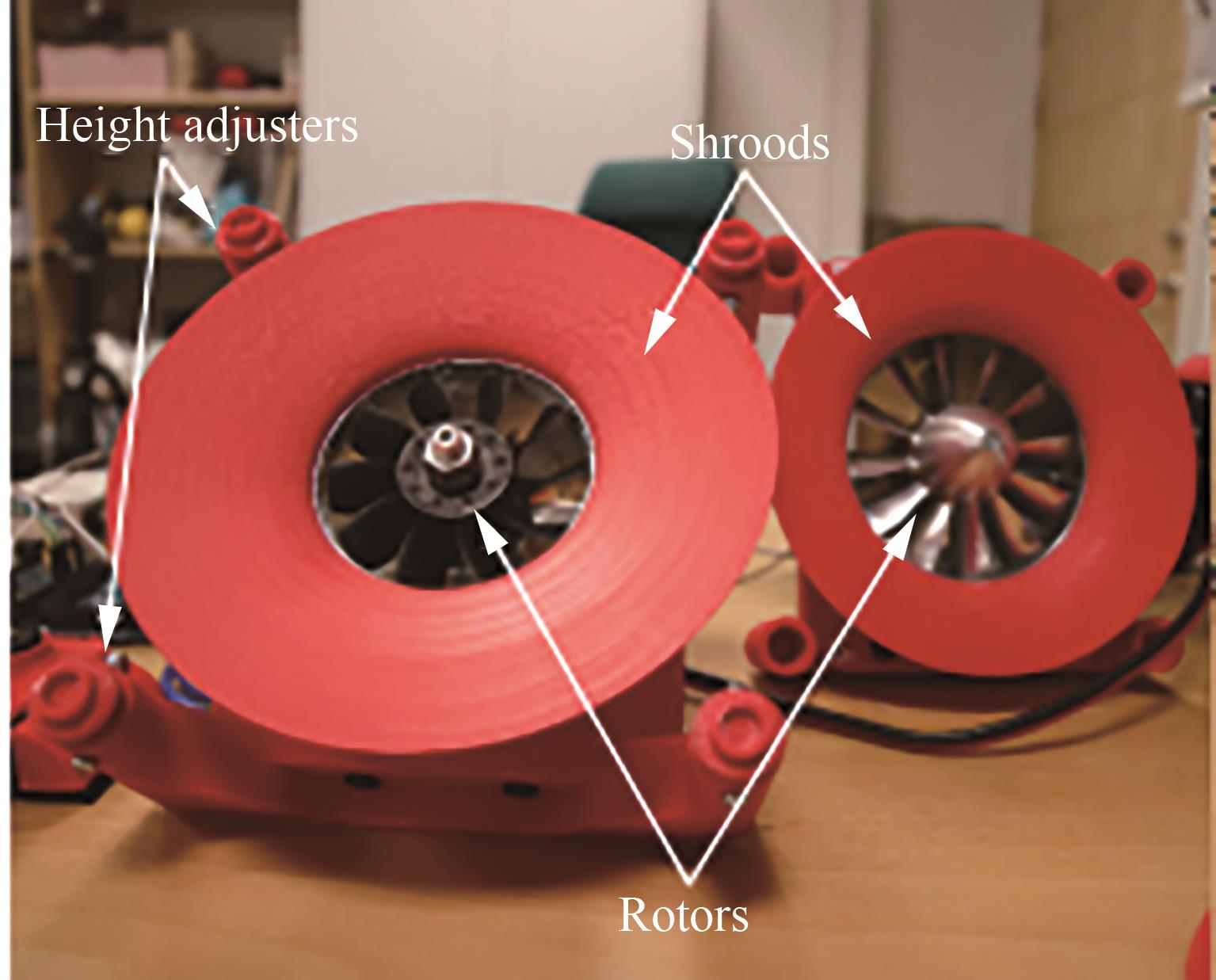

图 47
日本爱媛大学理工科研究生院爬壁无人机[65]


图 48
韩国科学技术院城市机器人试验室爬壁无人机[66]

图 49
东南大学江苏省工程力学重点试验室爬壁无人机[67]
图 50
伊拉克巴格达工业大学机械工程系爬壁无人机[68]

图 51
内盖夫本古里安大学机械工程系爬壁无人机[69]
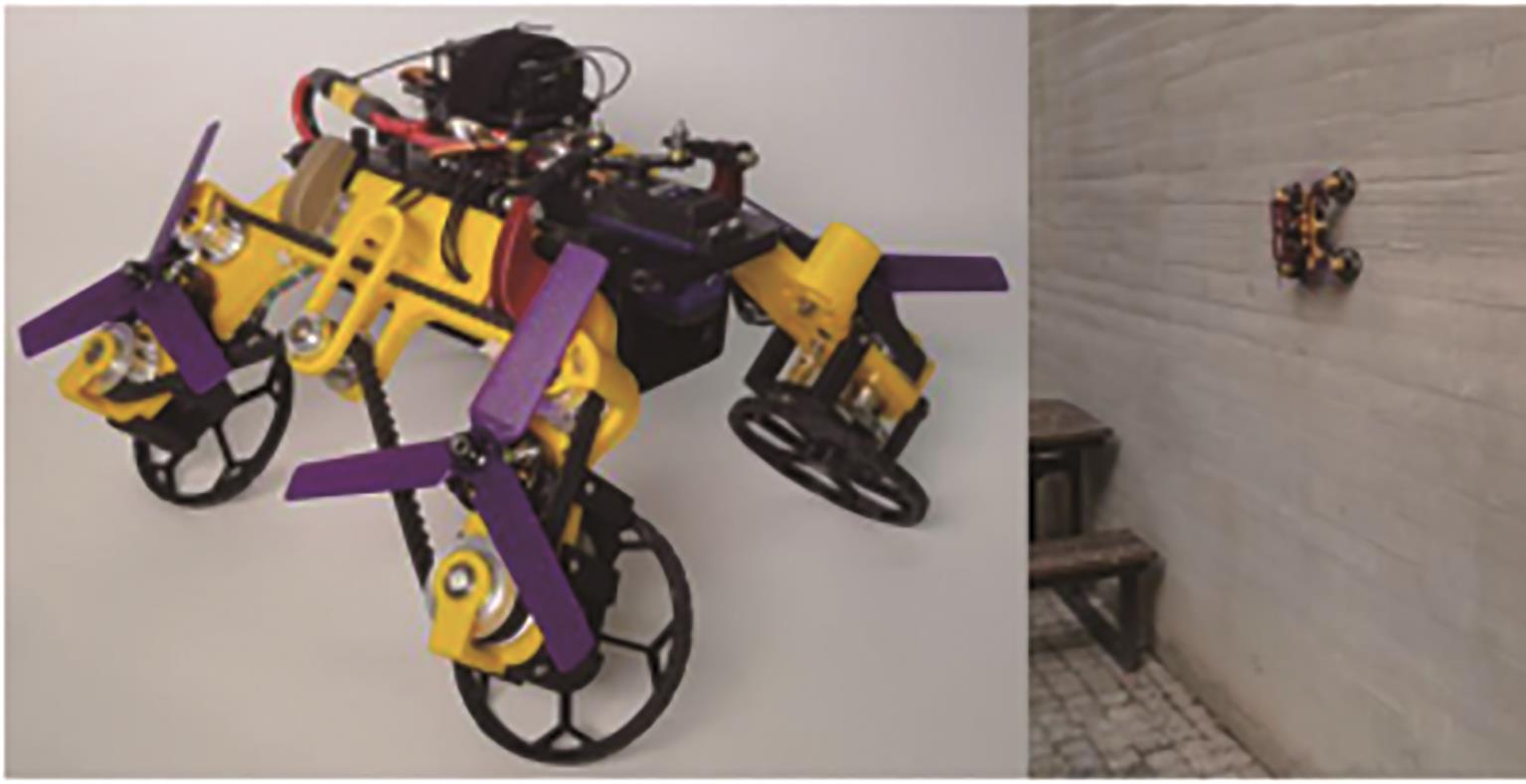
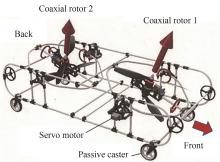
图 52
日本冈山大学自然科学技术研究生院爬壁无人机[70]
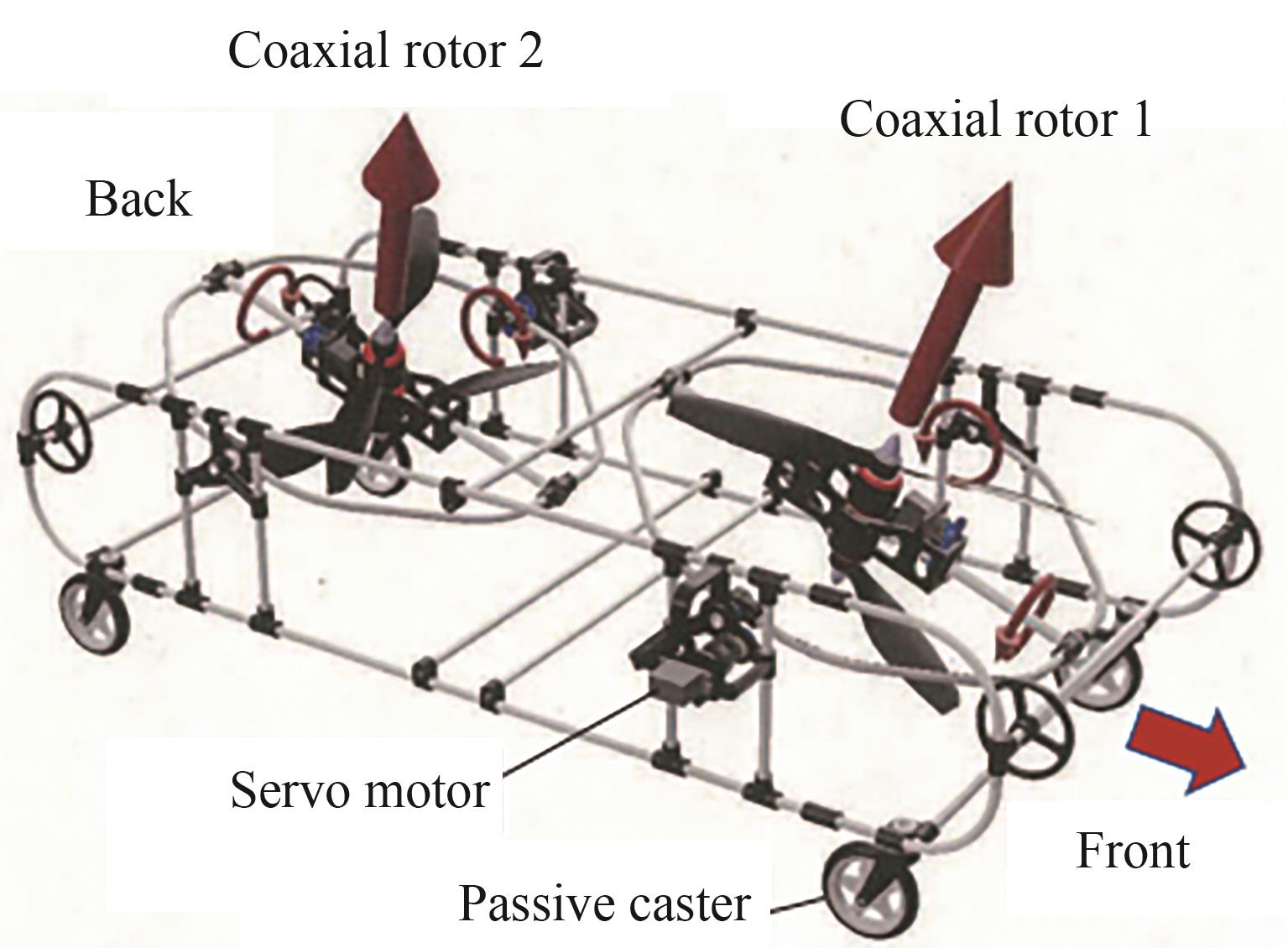

图 53
韩国科学技术院电气工程学院爬壁无人机[71-72]


图 54
纽约大学坦登工程学院爬壁无人机[73]


图 55
美国空军学院工程力学系粘胶式无人机[74]

图 56
瑞士联邦理工学院智能系统试验室粘胶式无人机[75]
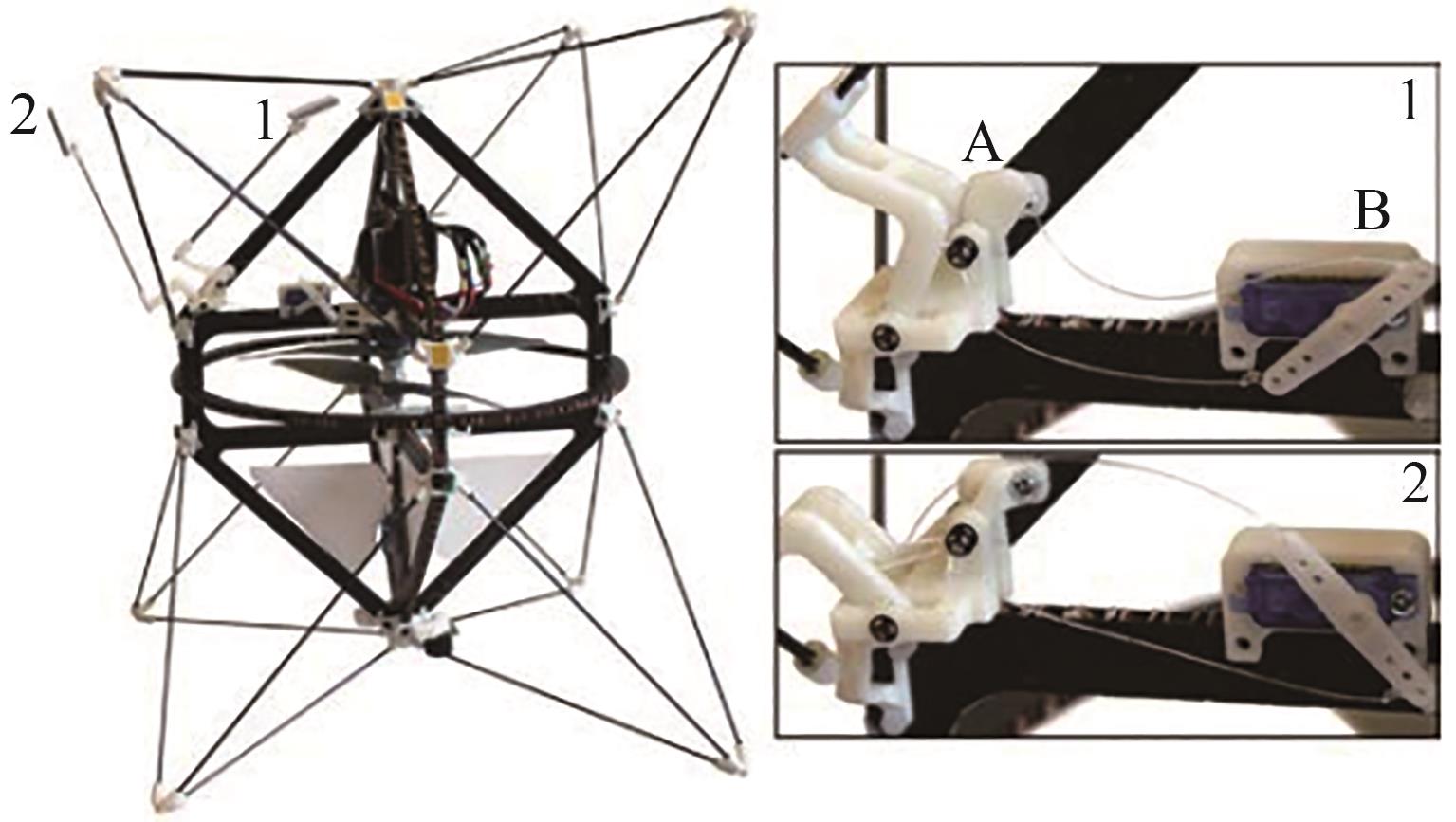
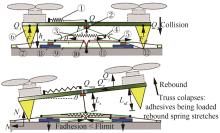
图 57
斯坦福大学机械工程专业粘胶式无人机[76-77]
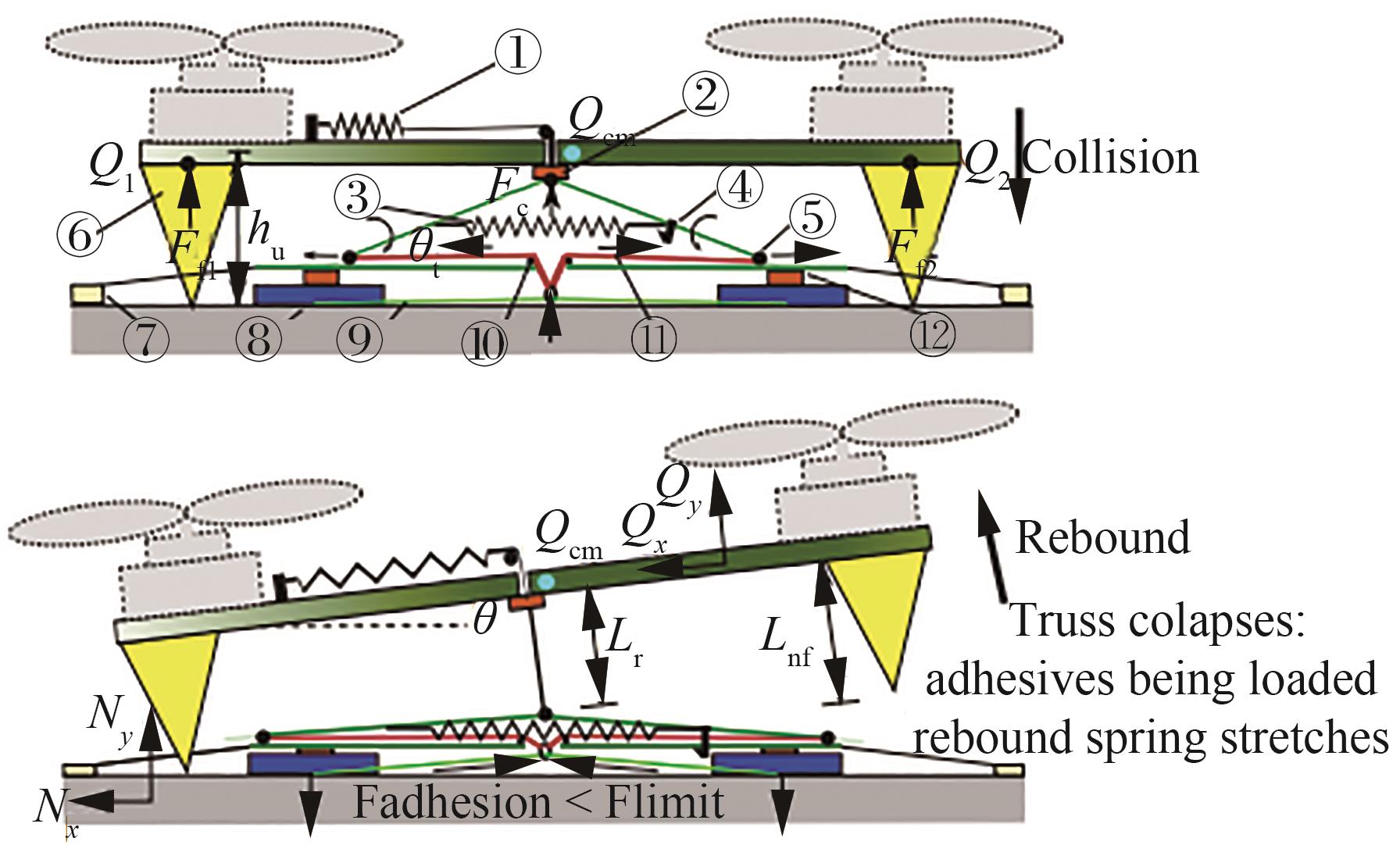
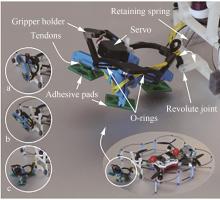
图 58
伊利诺伊理工学院机械、材料与航空航天工程系粘胶式无人机[78]

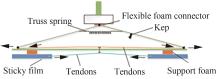
图 59
山东科技大学电子通信与物理学院粘胶式无人机[79]

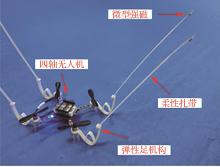
图 60
广东工业大学磁吸式无人机[80]
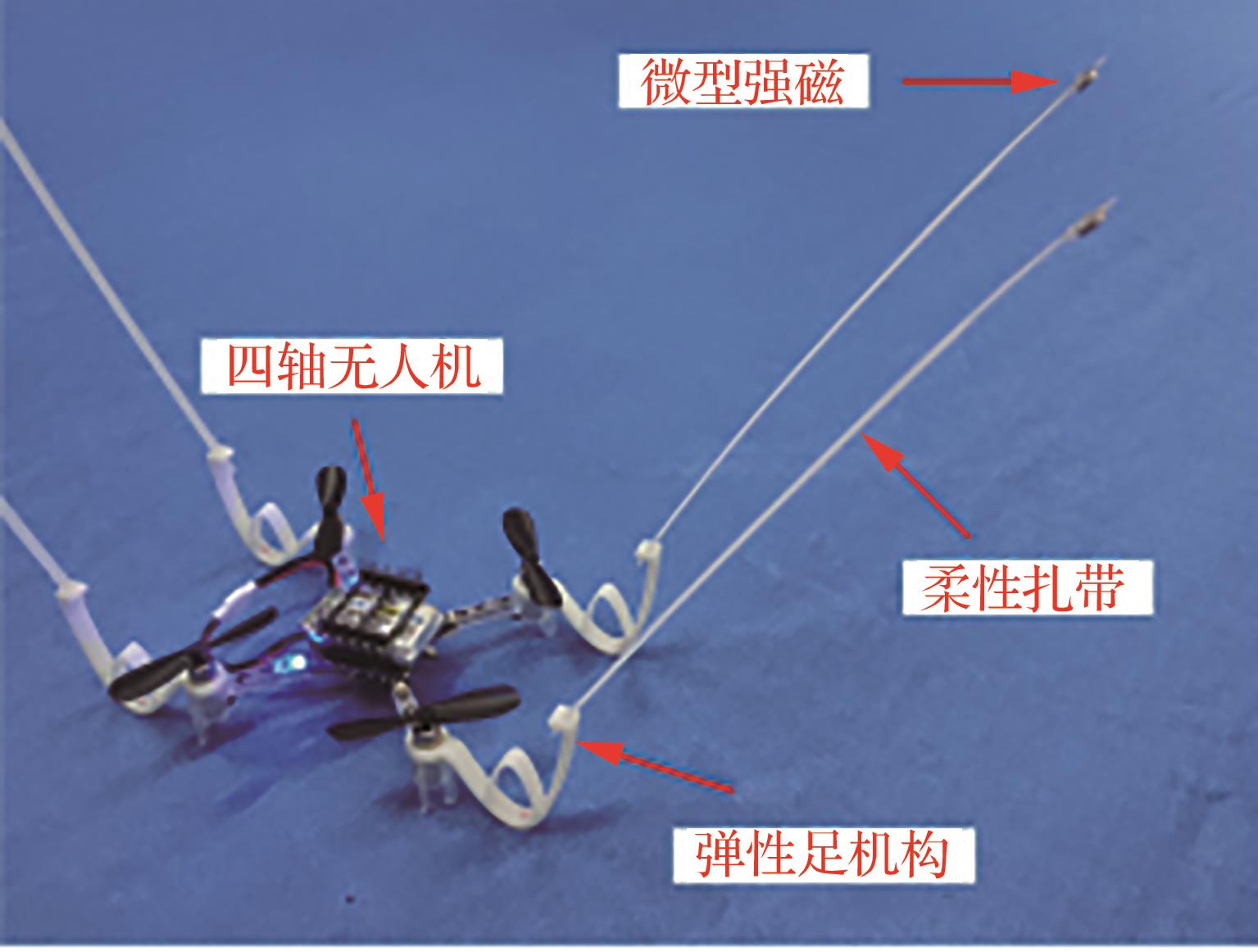

图 61
斯坦福大学电气工程系静电力吸附无人机[81]

图 62
哈佛大学电磁吸附仿生无人机[82]
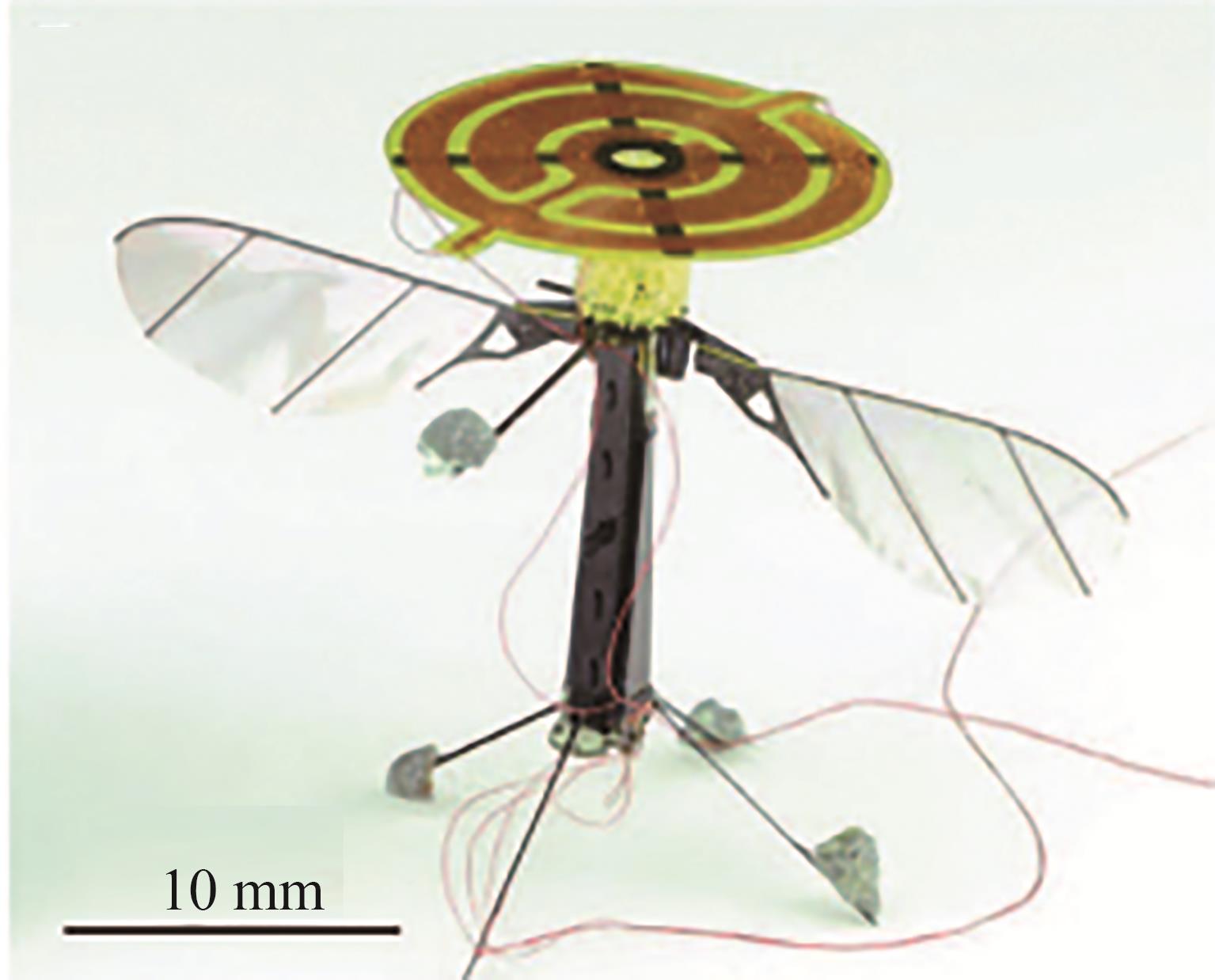
图 63
美国空军研究试验室变体机翼[83]

图 64
哈佛大学变体机构[84]


图 65
布里斯托尔大学航空航天工程系变体无人机[85]


图 66
南京航空航天大学自动化学院变体无人机[86]
| 1 | 闫超,涂良辉,王聿豪,等. 无人机在我国民用领域应用综述[J]. 飞行力学,2022,40(3):1-6,12. |
| YAN C, TU L H, WANG Y H,et al. Application of unmanned aerial vehicle in civil field in China[J]. Flight Dynamics,2022,40(3):1-6,12 (in Chinese). | |
| 2 | 崔敬魁. 面向电网巡线和森林火情监测的无人机路径规划算法研究[D]. 西安:西安理工大学,2017:1-4. |
| CUI J K. Research on UAV path planning algorithm for power line inspection and forest fire monitoring[D]. Xi’an:Xi’an University of Technology,2017:1-4 (in Chinese). | |
| 3 | 杨扬,王连发,张宇峰. 无人机桥梁检测技术进展与瓶颈问题分析[J]. 现代交通技术,2020,17(4):27-32. |
| YANG Y, WANG L F, ZHANG Y F. Development and challenging issues of bridge detection technology using unmanned aerial vehicles[J]. Modern Transportation Technology,2020,17(4):27-32 (in Chinese). | |
| 4 | 黄龙,张卫华,陈今茂,等. 爬壁机器人的研究现状与发展趋势[J]. 机械工程与技术,2021(3):345-363. |
| HUANG L, ZHANG W H, CHEN J M,et al. A review and trend of wall-climbing robots[J]. Mechanical Engineering and Technology,2021(3):345-363 (in Chinese). | |
| 5 | CULLER E, THOMAS G, LEE C. A perching landing gear for a quadcopter[C] ∥ 53rd AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics and Materials Conference. Reston:AIAA,2012. |
| 6 | ERBIL M A, PRIOR S D, KEANE A J. Design optimisation of a reconfigurable perching element for vertical take-off and landing unmanned aerial vehicles[J]. International Journal of Micro Air Vehicles,2013,5(3):207-228. |
| 7 | CHI W C, LOW K H, HOON K H,et al. Design of control strategy for autonomous perching with a quadrotor[J]. Applied Mechanics and Materials,2013,461:506-512. |
| 8 | CHI W C, LOW K H, HOON K H,et al. An optimized perching mechanism for autonomous perching with a quadrotor[C] ∥ 2014 IEEE International Conference on Robotics and Automation(ICRA). Piscataway:IEEE Press, 2014: 3109-3115. |
| 9 | LUO C, YU L J, REN P. A vision-aided approach to perching a bioinspired unmanned aerial vehicle[J]. IEEE Transactions on Industrial Electronics,2018,65(5):3976-3984. |
| 10 | PHANG S K, HAMID M R A, CHEN X D,et al. Autonomous ledge detection and landing with multi-rotor UAV[C] ∥ 2018 IEEE 14th International Conference on Control and Automation(ICCA). Piscataway:IEEE Press, 2018: 42-47. |
| 11 | LIN T J, LONG S Y, STOL K A. Automated perching of a multirotor UAV atop round timber posts[C] ∥ 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics(AIM). Piscataway:IEEE Press,2018: 486-491. |
| 12 | POPEK K M, JOHANNES M S, WOLFE K C,et al. Autonomous grasping robotic aerial system for perching(AGRASP)[C] ∥ 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Piscataway: IEEE Press,2018: 1-9. |
| 13 | HANG K Y, LYU X M, SONG H R,et al. Perching and resting-A paradigm for UAV maneuvering with modularized landing gears[J]. Science Robotics,2019,4(28):eaau6637. |
| 14 | ZHANG H J, SUN J F, ZHAO J G. Compliant bistable gripper for aerial perching and grasping[C] ∥ 2019 International Conference on Robotics and Automation(ICRA). Piscataway:IEEE Press,2019:1248-1253. |
| 15 | ZHANG H J, LERNER E, CHENG B,et al. Compliant bistable grippers enable passive perching for micro aerial vehicles[J]. IEEE/ASME Transactions on Mechatronics,2021,26(5):2316-2326. |
| 16 | YU P F, WANG Z H, WONG K C. Exploring aerial perching and grasping with dual symmetric manipulators and compliant end-effectors[J]. International Journal of Micro Air Vehicles,2019,11:175682931987741. |
| 17 | KITCHEN R, BIERWOLF N, HARBERTSON S,et al. Design and evaluation of a perching hexacopter drone for energy harvesting from power lines[C] ∥ 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Piscataway:IEEE Press,2020:1192-1198. |
| 18 | MAGESH M, JAWAHAR P K. Examination of shape memory polymer-auxetic landing gears on landing approach for quadcopter[J]. Materials Today:Proceedings,2021,47:471-479. |
| 19 | KOVAČ M, GERMANN J, HÜRZELER C,et al. A perching mechanism for micro aerial vehicles[J]. Journal of Micro-Nano Mechatronics,2009,5(3):77-91. |
| 20 | STEWART W, GUARINO L, PISKAREV Y,et al. Passive perching with energy storage for winged aerial robots[J]. Advanced Intelligent Systems,2021:2100150. |
| 21 | BACKUS S B, ODHNER L U, DOLLAR A M. Design of hands for aerial manipulation:Actuator number and routing for grasping and perching[C] ∥ 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press,2014: 34-40. |
| 22 | NAGENDRAN A, CROWTHER W, RICHARDSON R. Biologically inspired legs for UAV perched landing[J]. IEEE Aerospace and Electronic Systems Magazine,2012,27(2):4-13. |
| 23 | CHI W C, LOW K H, HOON K H,et al. A bio-inspired adaptive perching mechanism for unmanned aerial vehicles[J]. Journal of Robotics and Mechatronics,2012,24(4):642-648. |
| 24 | DOYLE C E, BIRD J J, ISOM T A,et al. An avian-inspired passive mechanism for quadrotor perching[J]. IEEE/ASME Transactions on Mechatronics,2013,18(2):506-517. |
| 25 | XIE P, MA O. Grasping analysis of a bio-inspired UAV/MAV perching mechanism[C] ∥ Proceedings of ASME 2013 International Mechanical Engineering Congress and Exposition. New York:ASME,2013. |
| 26 | NADAN P M, ANTHONY T M, MICHAEL D M,et al. A bird-inspired perching landing gear system[J]. Journal of Mechanisms and Robotics,2019,11(6):061002. |
| 27 | NADAN P M, LEE C L. Computational design of a bird-inspired perching landing gear mechanism[C] ∥ ASME International Mechanical Engineering Congress and Exposition. New York:ASME,2018. |
| 28 | MCLAREN A, FITZGERALD Z, GAO G,et al. A passive closing,tendon driven,adaptive robot hand for ultra-fast,aerial grasping and perching[C] ∥ 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Piscataway:IEEE Press,2019: 5602-5607. |
| 29 | BAI L, WANG H, CHEN X H,et al. Design and experiment of a deformable bird-inspired UAV perching mechanism[J]. Journal of Bionic Engineering,2021,18(6):1304-1316. |
| 30 | RODERICK W R T, CUTKOSKY M R, LENTINK D. Bird-inspired dynamic grasping and perching in arboreal environments[J]. Science Robotics,2021,6(61):eabj7562. |
| 31 | RODERICK W R T, CUTKOSKY M R, LENTINK D. Touchdown to take-off:At the interface of flight and surface locomotion[J]. Interface Focus,2017,7(1):20160094. |
| 32 | 昌敏,孙杨,白俊强. 垂面栖息微型无人机飞行原理与技术进展[J]. 无人系统技术,2019,2(2):22-31. |
| CHANG M, SUN Y, BAI J Q. Flight principles and research progress on vertical-perching micro aerial vehicle(MAV)[J]. Unmanned Systems Technology,2019,2(2):22-31 (in Chinese). | |
| 33 | 倪勇,吉爱红,肖天航,等. 兼具扑翼飞行与爬壁能力的仿生两栖机器人研究[J]. 机电一体化,2017,23(2):9-16,46. |
| NI Y, JI A H, XIAO T H,et al. Study of biomimetic amphibious robot for flapping and climbing[J]. Mechatronics,2017, 23(2):9-16, 46 (in Chinese). | |
| 34 | CUTKOWSKY M, DESBIENS A. Bio-inspired perching and crawling air vehicles[EB/OL]. (2008-10-2)[2022-6-4]. . |
| 35 | DESBIENS A L, ASBECK A T, CUTKOSKY M R. Scansorial landing and perching[M] ∥ Robotics research. Berlin,Heidelberg:Springer,2011: 169-184. |
| 36 | DESBIENS A L, ASBECK A T, CUTKOSKY M R. Landing,perching and taking off from vertical surfaces[J]. The International Journal of Robotics Research,2011,30(3):355-370. |
| 37 | LUSSIER D A. Landing and perching on vertical surfaces[D]. Stanford: Stanford University,2012. |
| 38 | DICKSON J D, CLARK J E. Design of a multimodal climbing and gliding robotic platform[J]. IEEE/ASME Transactions on Mechatronics,2012,18(2):494-505. |
| 39 | MEHANOVIC D, BASS J, COURTEAU T,et al. Autonomous thrust-assisted perching of a fixed-wing UAV on vertical surfaces[C] ∥ Conference on Biomimetic and Biohybrid Systems. Cham:Springer,2017: 302-314. |
| 40 | MEHANOVIC D, RANCOURT D, DESBIENS A L. Fast and efficient aerial climbing of vertical surfaces using fixed-wing UAVs[J]. IEEE Robotics and Automation Letters,2019,4(1):97-104. |
| 41 | POPE M T, KIMES C W, JIANG H,et al. A multimodal robot for perching and climbing on vertical outdoor surfaces[J]. IEEE Transactions on Robotics,2017,33(1):38-48. |
| 42 | POPE M T, CUTKOSKY M R. Thrust-assisted perching and climbing for a bioinspired UAV[C] ∥ Conference on Biomimetic and Biohybrid Systems. Cham:Springer,2016: 288-296. |
| 43 | ZHANG K, CHERMPRAYONG P, ALHINAI T M,et al. SpiderMAV:Perching and stabilizing micro aerial vehicles with bio-inspired tensile anchoring systems[C] ∥ 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Piscataway: IEEE Press,2017: 6849-6854. |
| 44 | NGUYEN H N, SIDDALL R, STEPHENS B,et al. A passively adaptive microspine grapple for robust,controllable perching[C] ∥ 2019 2nd IEEE International Conference on Soft Robotics(RoboSoft). Piscataway:IEEE,2019. |
| 45 | BACKUS S, IZRAELEVITZ J, QUAN J,et al. Design and testing of an ultra-light weight perching system for sloped or vertical rough surfaces on Mars[C] ∥ 2020 IEEE Aerospace Conference. Piscataway:IEEE Press,2020: 1-12. |
| 46 | LIU Y, SUN G X, CHEN H P. Impedance control of a bio-inspired flying and adhesion robot[C] ∥ 2014 IEEE International Conference on Robotics and Automation(ICRA). Piscataway:IEEE Press,2014:3564-3569. |
| 47 | WOPEREIS H W, VAN DER MOLEN T D, POST T H,et al. Mechanism for perching on smooth surfaces using aerial impacts[C]∥2016 IEEE International Symposium on Safety, Security,and Rescue robotics(SSRR). Piscataway:IEEE Press,2016:154-159. |
| 48 | HUANG T H, ELIBOLI A, CHONG N Y. A design for UAV irregular surface landing capability[C]∥ Proceedings of the 2020 17th International Conference on Ubiquitous Robots. 2020. |
| 49 | LIU S S, DONG W, MA Z,et al. Adaptive aerial grasping and perching with dual elasticity combined suction cup[J]. IEEE Robotics and Automation Letters,2020,5(3):4766-4773. |
| 50 | LIU S S, DONG W, MA Z,et al. Dual-durometer combination of vacuum cup for aerial grasping[C] ∥ 2020 IEEE International Conference on Real-time Computing and Robotics(RCAR). Piscataway:IEEE Press,2020:8-13. |
| 51 | TSUKAGOSHI H, OSADA Y. Soft hybrid suction cup capable of sticking to various objects and environments[J]. Actuators,2021,10(3):50. |
| 52 | MAHMOOD S K, BAKHY S H, TAWFIK M A. Propeller-type wall-climbing robots:A review[C] ∥ IOP Conference Series:Materials Science and Engineering. 2021, 1094(1): 012106. |
| 53 | DING X, YU Y, ZHU J J. Trajectory linearization tracking control for dynamics of a multi-propeller and multifunction aerial robot-MMAR[C] ∥ 2011 IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press,2011:757-762. |
| 54 | DING X L, YU Y S. Motion planning and stabilization control of a multipropeller multifunction aerial robot[J]. IEEE/ASME Transactions on Mechatronics,2013,18(2):645-656. |
| 55 | SHIN J U, KIM D, KIM J H,et al. Micro aerial vehicle type wall-climbing robot mechanism[C] ∥ 2013 IEEE RO-MAN. Piscataway:IEEE Press,2013: 722-725. |
| 56 | MYEONG W C, JUNG K Y, JUNG S W,et al. Drone-type wall-climbing robot platform for structural health monitoring[C] ∥ 6th AESE/11th ANCRiSST Joint Conference. 2015. |
| 57 | MYEONG W C, JUNG K Y, JUNG S W,et al. Development of a drone-type wall-sticking and climbing robot[C] ∥ 2015 12th International Conference on Ubiquitous Robots and Ambient Intelligence(URAI). Piscataway:IEEE Press,2015: 386-389. |
| 58 | YAMADA M, NAKAO M, HADA Y,et al. Development and field test of novel two-wheeled UAV for bridge inspections[C] ∥ 2017 International Conference on Unmanned Aircraft Systems(ICUAS). Piscataway:IEEE Press, 2017: 1014-1021. |
| 59 | IWAMOTO T, ENAKA T, TADA K. Development of testing machine for tunnel inspection using multi-rotor UAV[J]. Journal of Physics:Conference Series,2017,842:012068. |
| 60 | JUNG S, SHIN J U, MYEONG W,et al. Mechanism and system design of MAV(Micro Aerial Vehicle)-type wall-climbing robot for inspection of wind blades and non-flat surfaces[C] ∥ 2015 15th International Conference on Control,Automation and Systems(ICCAS). Piscataway:IEEE Press,2015:1757-1761. |
| 61 | TANAKA K, ZHANG D, INOUE S,et al. A design of a small mobile robot with a hybrid locomotion mechanism of wheels and multi-rotors[C] ∥ 2017 IEEE International Conference on Mechatronics and Automation(ICMA). Piscataway:IEEE,2017. |
| 62 | MYEONG W, SONG S, MYUNG H. Development of a wall-climbing drone with a rotary arm for climbing various-shaped surfaces[C] ∥ 2018 15th International Conference on Ubiquitous Robots(UR). Piscataway:IEEE Press,2018:687-692. |
| 63 | WATANABE K, NAKATSUKA T, NAGAI I. Production of a wall-climbing-type quadrotor and its experiment for verifying basic operations[C] ∥ 2018 IEEE International Conference on Mechatronics and Automation(ICMA). Piscataway:IEEE Press,2018:1850-1855. |
| 64 | ANDRIKOPOULOS G, NIKOLAKOPOULOS G. Vortex actuation via electric ducted fans:An experimental study[J]. Journal of Intelligent & Robotic Systems,2019,95(3):955-973. |
| 65 | YASUNAGA M, LEE J H, OKAMOTO S. Prototype design and experimental test of a rotorcraft capable of adhering to and moving on the ceiling[C] ∥ MATEC Web of Conferences. Paris:EDP Sciences,2016. |
| 66 | MYEONG W, MYUNG H. Development of a wall-climbing drone capable of vertical soft landing using a tilt-rotor mechanism[J]. IEEE Access,2018,7:4868-4879. |
| 67 | JIANG S, ZHANG J. Real-time crack assessment using deep neural networks with wal-climbing unmanned aerial system[J]. Computer-Aided Civil and Infrastructure Engineering,2020,35(6):549-564. |
| 68 | MAHMOOD S K, BAKHY S H, TAWFIK M A. Novel wall-climbing robot capable of transitioning and perching[C] ∥ IOP Conference Series:Materials Science and Engineering. 2020. |
| 69 | DAVID N B, ZARROUK D. Design and analysis of FCSTAR, a hybrid flying and climbing sprawl tuned robot[J]. IEEE Robotics and Automation Letters,2021,6(4):6188-6195. |
| 70 | KOMURA H, WATANABE K, NAGAI I. Production of a small-sized tandem rotor aircraft with two tiltable coaxial rotors and its experiments[C] ∥ 2021 IEEE International Conference on Mechatronics and Automation(ICMA). Piscataway:IEEE Press,2021: 687-691. |
| 71 | LEE H, YU B, TIRTAWARDHANA C,et al. CAROS-Q:Climbing aerial robot system adopting rotor offset with a quasi-decoupling controller[J]. IEEE Robotics and Automation Letters,2021,6(4):8490-8497. |
| 72 | LEE H, JEONG M, KIM C,et al. Low-level pose control of tilting multirotor for wall perching tasks using reinforcement learning[C] ∥ 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Piscataway:IEEE Press,2021. |
| 73 | MAO J, LI G, NOGAR S,et al. Aggressive visual perching with quadrotors on inclined surfaces[C] ∥ 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Piscataway:IEEE Press,2021:5242-5248. |
| 74 | ANDERSON M. The sticky-pad plane and other innovative concepts for perching UAVS[C] ∥ 47th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition. Reston:AIAA,2009. |
| 75 | DALER L, KLAPTOCZ A, BRIOD A,et al. A perching mechanism for flying robots using a fibre-based adhesive[C] ∥ 2013 IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press,2013:4433-4438. |
| 76 | JIANG H, POPE M T, HAWKES E W,et al. Modeling the dynamics of perching with opposed-grip mechanisms[C] ∥ 2014 IEEE International Conference on Robotics and Automation(ICRA). Piscataway:IEEE Press,2014:3102-3108. |
| 77 | THOMAS J, POPE M, LOIANNO G,et al. Aggressive flight with quadrotors for perching on inclined surfaces[J]. Journal of Mechanisms and Robotics,2016,8(5):051007. |
| 78 | KALANTARI A, MAHAJAN K, RUFFATTO D,et al. Autonomous perching and take-off on vertical walls for a quadrotor micro air vehicle[C] ∥ 2015 IEEE International Conference on Robotics and Automation(ICRA). Piscataway:IEEE Press,2015:4669-4674. |
| 79 | GUO Y, ZHANG J, JU Y,et al. Climbing reconnaissance drone design[C] ∥ IOP Conference Series:Materials Science and Engineering. 2018, 452: 042060. |
| 80 | 蒋俊高. 面向无人机的仿生壁面自动起降系统的设计[D]. 广州:广东工业大学,2020: 13-40. |
| JIANG J G. Design of bioic wall surface automatic takeoff and landing system for UAV[D]. Guangzhou:Guangdong University of Technology,2020: 13-40 (in Chinese). | |
| 81 | PARK S, DREW D S, FOLLMER S,et al. Lightweight high voltage generator for untethered electroadhesive perching of micro air vehicles[J]. IEEE Robotics and Automation Letters,2020,5(3):4485-4492. |
| 82 | GRAULE M A, CHIRARATTANANON P, FULLER S B,et al. Perching and takeoff of a robotic insect on overhangs using switchable electrostatic adhesion[J]. Science,2016,352(6288):978-982. |
| 83 | REICH G, WOJNAR O, ALBERTANI R. Aerodynamic performance of a notional perching MAV design[C] ∥ 47th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition. Reston:AIAA,2009:63. |
| 84 | MANCHESTER Z R, LIPTON J I, WOOD R J,et al. A variable forward-sweep wing design for enhanced perching in micro aerial vehicles[C] ∥ 55th AIAA Aerospace Sciences Meeting. Reston:AIAA,2017:0011. |
| 85 | GREATWOOD C, WALDOCK A, RICHARDSON T. Perched landing manoeuvres with a variable sweep wing UAV[J]. Aerospace Science and Technology,2017,71:510-520. |
| 86 | 袁亮,何真,王月. 变体无人机栖落机动建模与轨迹优化[J]. 南京航空航天大学学报,2018,50(2):266-275. |
| YUAN L, HE Z, WANG Y. Modeling and trajectory optimization of perching maneuvers for morphing UAV[J]. Journal of Nanjing University of Aeronautics & Astronautics,2018,50(2):266-275 (in Chinese). | |
| 87 | HURST A, WICKENHEISER A, GARCIA E. Localization and perching maneuver tracking for a morphing UAV[C] ∥ Proceedings of IEEE/ION PLANS 2008. Piscataway:IEEE Press,2008. |
| 88 | WICKENHEISER A, GARCIA E. Perching aerodynamics and trajectory optimization[C] ∥ Active and Passive Smart Structures and Integrated Systems 2007. San Diego:International Society for Optics and Photonics,2007,6525:191-199. |
| 89 | 何真,陆宇平,郑曼曼. 变体无人机栖息机动的仿真与分析[C] ∥ 第三十三届中国控制会议论文集(E卷). 上海:上海系统科学出版社,2014: 109-114. |
| HE Z, LU Y P, ZHENG M M. Simulation and analysis of perching maneuvers for morphing UAVS[C] ∥ Proceedings of the 33rd China Control Conference(Volume E). Shanghai:Shanghai Systems Science Press,2014: 109-114. | |
| 90 | 岳珵,何真,王无天. 变体辅助的无人机栖落机动模糊控制设计[J]. 南京航空航天大学学报,2020,52(6):871-880. |
| YUE C, HE Z, WANG W T. Fuzzy control design for perching maneuvers of morphing UAVs[J]. Journal of Nanjing University of Aeronautics & Astronautics,2020,52(6):871-880 (in Chinese). | |
| 91 | WANG P F, ZHANG Y F, QIN H L,et al. Offline perching location selection for quadrotor UAV in urban environment[C] ∥ 2016 12th IEEE International Conference on Control and Automation(ICCA). Piscataway:IEEE Press,2016. |
| 92 | ZHANG Z, XIE P, MA O. Bio-inspired trajectory generation for UAV perching movement based on tau theory[J]. International Journal of Advanced Robotic Systems,2014,11(9):141. |
| 93 | ZHANG Z, XIE P, MA O. Bio-inspired trajectory generation for UAV perching[C] ∥ 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Piscataway:IEEE Press,2013:997-1002. |
| 94 | CHI W. A bio-inspired methodology of automatic perching for unmanned aerial vehicles[D]. Singapore:Nanyang Technological University,2016: 23-41. |
| 95 | MAITRA A, PRASATH S R, PADHI R. A brief survey on bio-inspired algorithms for autonomous landing[J]. IFAC-Papers Online,2016,49(1):407-412. |
| 96 | TOMIĆ T, MAIER M, HADDADIN S. Learning quadrotor maneuvers from optimal control and generalizing in real-time[C] ∥ 2014 IEEE International Conference on Robotics and Automation(ICRA). Piscataway:IEEE Press,2014:1747-1754. |
| 97 | GHADIOK V, GOLDIN J, REN W. On the design and development of attitude stabilization,vision-based navigation,and aerial gripping for a low-cost quadrotor[J]. Autonomous Robots,2012,33(1):41-68. |
| 98 | ZHANG H, ZHAO J. Vision based surface slope estimation for unmanned aerial vehicle perching[C] ∥ Dynamic Systems and Control Conference in 2018. New York:ASME,2018. |
| 99 | 叶希. 近面环境下四旋翼无人机的控制技术研究[D]. 南京:南京理工大学,2019: 29-37. |
| YE X. Research on control technology of quadrotor UAV in near-surface environment[D]. Nanjing:Nanjing University of Science & Technology,2019: 29-37 (in Chinese). | |
| 100 | 孙杨,昌敏,白俊强. 微小型四旋翼无人机垂面栖停轨迹规划与控制[J]. 航空学报,2022,43(9):325756. |
| SUN Y, CHANG M, BAI J Q. Trajectory planning and control for micro-quadrotor perching on vertical surface[J]. Acta Aeronautica et Astronautica Sinica,2022,43(9):325756 (in Chinese). | |
| 101 | TAHK M J, HAN S, LEE B Y,et al. Perch landing assisted by thruster(PLAT):Concept and trajectory optimization[J]. International Journal of Aeronautical and Space Sciences,2016,17(3):378-390. |
| 102 | TAHK M J, HAN S, LEE B Y,et al. Trajectory optimization and control algorithm of longitudinal perch landing assisted by thruster[C] ∥ 2016 European Control Conference(ECC). Piscataway:IEEE Press,2016. |
| 103 | WALDOCK A, GREATWOOD C, SALAMA F,et al. Learning to perform a perched landing on the ground using deep reinforcement learning[J]. Journal of Intelligent and Robotic Systems,2018,92(3-4):685-704. |
| 104 | ALIKHAN M, PEYADA N K, GO T H. Flight dynamics and optimization of three-dimensional perching maneuver[J]. Journal of Guidance,Control,and Dynamics,2013,36(6):1791-1797. |
| 105 | 李达,何真,阚莹莹. 无人机栖落机动建模与轨迹优化[J]. 飞行力学,2017,35(4):47-51. |
| LI D, HE Z, KAN Y Y. Modeling and trajectory optimization of perching maneuvers for UAV[J]. Flight Dynamics,2017,35(4):47-51 (in Chinese). | |
| 106 | 邹文露. 无人机栖息动态特性分析与同步控制[D]. 成都:电子科技大学,2018:36-49. |
| ZOU W L. Dynamic characteristics analysis and synchronous control of unmanned aerial vehicle[D]. Chengdu:University of Electronic Science and Technology of China,2018:36-49 (in Chinese). | |
| 107 | FEROSKHAN M, GO T H. Control strategy of sideslip perching maneuver under dynamic stall influence[J]. Aerospace Science and Technology,2018,72:150-163. |
| 108 | MOORE J, CORY R, TEDRAKE R. Robust post-stall perching with a simple fixed-wing glider using LQR-Trees[J]. Bioinspiration & Biomimetics,2014,9(2):025013. |
| 109 | CRANDALL K L, MINOR M A. UAV fall detection from a dynamic perch using Instantaneous Centers of Rotation and inertial sensing[C] ∥ 2015 IEEE International Conference on Robotics and Automation(ICRA). Piscataway:IEEE Press,2015: 4675-4679. |
| 110 | 王无天,何真,岳珵. 飞行器栖落机动的轨迹跟踪控制及吸引域优化计算[J]. 北京航空航天大学学报,2021,47(2):414-423. |
| WANG W T,HEN Z, YUE C. Trajectory tracking control and optimal computation of attraction domain for aircraft in perching maneuvers[J]. Journal of Beijing University of Aeronautics and Astronautics,2018,40(11):414-423 (in Chinese). | |
| 111 | 万慧雯,何真,曹瑞,等. 无人机栖落机动的一种离线鲁棒预测控制算法[J]. 南京航空航天大学学报,2019,51(6):785-794. |
| WAN H W, HE Z, CAO R. An off-line robust predictive control algorithm for UAV in perching maneuver[J]. Journal of Nanjing University of Aeronautics & Aeronautics,2019,51(6):785-794 (in Chinese). |
| [1] | 李新凯, 张宏立, 范文慧. 非匹配扰动下变体无人机预设性能控制[J]. 航空学报, 2022, 43(2): 325008-325008. |
| [2] | 楚中毅, 赖咪, 燕少博. 欠驱动指爪机构的被动弹性元件参数优化设计[J]. 航空学报, 2018, 39(1): 421370-421370. |
| [3] | 楚中毅, 周苗, 胡健, 卢山. 主被动复合驱动自适应指爪机构的抓取模式分析[J]. 航空学报, 2014, 35(12): 3451-3458. |
| [4] | 魏承;赵阳;田浩. 空间机器人捕获漂浮目标的抓取控制[J]. 航空学报, 2010, 31(3): 632-637. |
| [5] | 丁希仑;俞玉树. 一种多旋翼多功能空中机器人及其腿式壁面行走运动规划[J]. 航空学报, 2010, 31(10): 2075-2086. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
版权所有 © 航空学报编辑部
版权所有 © 2011航空学报杂志社
主管单位:中国科学技术协会 主办单位:中国航空学会 北京航空航天大学