
飞机安装推力是飞机发动机在特定飞行条件下产生的推力,是决定飞机性能的关键因素,对飞机飞行性能、经济性、安全性和环境适应性有重要的影响。提升飞机安装推力可减少燃油消耗,提高飞行效率和机动性,降低运营成本,增强隐身和环境适应性,提升安全性[1]。大量研究[2-7]表明,后体阻力主要受飞机机身几何形状变化影响,是影响飞机安装推力性能的重要因素,对其开展优化研究是提升飞机安装推力性能的重要途径。
可变面积喷管的收敛-扩张对飞机后体几何形状产生直接影响,算法估算或仿真模拟是实验室内机身空气动力学分析与评估的常用方法。如Nicolosi等[8]提出一种基于计算流体力学的运输飞机机身气动力系数估算方法。Ranjan等[9]提出平均流场演化法并通过大涡模拟研究了货运飞机机身尾部的流场演变,得出后体上翘角度与涡旋的关联关系。任超奇等[10]通过计算流体力学计算发现尾翼的存在有利于减少喷管阻力,交错尾翼布置模型的总阻力最小。风洞试验也是一种重要的气动力系数评估方式,如Polhamus和Spreemann[11]通过风洞数据细致地分析出飞行姿态及翼型-机身组合在不同飞行工况下的稳定性状态,探索出侧洗流与稳定性的关联关系,定性地指出机翼-机身耦合特征不能完全表征后体阻力的主要影响因素。尽管风洞数据能够更加全面、准确地反应几何特性与气动力系数的关系,但使用计算流体力学的方式能够以更低的成本计算出更为可靠的特性结果。
除机身几何特性外,航空发动机排气特征对机体后体阻力的影响也不可忽略。譬如,Runckel[12]探讨了双发动机飞机后体与排气系统间的相互干扰问题,优化喷管的安装对降低飞机阻力至关重要。Nugent和Pendergraft[13]研究了双发战斗机在跨声速条件下的后体和喷管压力。在Ma=0.6和Ma=0.8时,模型与飞行试验数据一致性良好,显示出良好的再压缩特性;而在Ma=0.9和Ma=1.2时,流动复杂性导致再压缩效果降低。可见,发动机喷管扩张-收敛伴随着推力、阻力非线性变化,特别是在跨声速工况,其非线性特性更为复杂。
喷管收敛-扩张改变的几何特性增减后体阻力,对发动机安装推力产生影响。另一方面,收扩过程会直接影响发动机推力,针对二者的非线性耦合特性通常需要借助不同算法或不同寻优方法进行优化设计。譬如,杨体浩等[14]采用自由形变(Free-Form Deformation, FFD)参数化方法、径向基函数(Radial Basis Function,RBF)的动网格技术,实现了后体总阻力降低2.67%。杨锦文等[15]开展基于NSGA-Ⅱ与Kriging代理模型的混合优化算法对后体单边膨胀面的气动优化,降低后体阻力研究。实现了在起飞状态下减少47.6%的喷流引起的低头力矩增量。李娜和吉洪湖[16]通过三维黏性数值分析和逐步线性迭代法,快速确定满足发动机内外涵流量匹配要求的喷管几何参数,以更小的喷管出口面积实现更高的推力效率。Martens[17]选择了具有紧密空间的轴对称C-D喷管和精心设计的尾体配置,以实现低阻力和高性能。潘睿丰[18]研究了一种新型旁路式双喉道气动矢量喷管(Bypass Dual-Throat Nozzle, BDTN),该喷管通过自适应小孔射流技术显著降低了喷管阻力。任超奇等[19]采用基于部分正交多项式的响应面法,扩张半角和收敛半角是主要影响因素,通过优化得到综合性能最优解。张瑞霞等[20]研究了单环调节轴对称收扩喷管全包线推力特性,计算出最优面积比区间。相关研究中对发动机喉道面积及喷管外扩尺寸协同调节优化的资料较少,而通过考虑其几何特性、调节计划的相互影响机制是一种较为可行的优化方法。
基于此,为获得耦合飞机/发动机一体化影响的最优安装推力情形下航空发动机A8面积控制规律及A9/A8面积比,开展基于模型动态仿真的航空发动机喷管调节计划优化方法研究。建立基于动态常微分方程的发动机模型耦合二分法的动态仿真分析方法,以实现发动机性能的实时评估,迭代出基于差分进化法并满足气动稳定性要求的最优发动机安装性能,获取了最优A8面积控制规律及A9/A8面积比。建立了飞/发一体化耦合的动态仿真模型,提出并初步验证了航空发动机喷管调节计划协同优化方法,可为提升发动机安装性能提供理论方法和技术指导,具有重要的工程价值。
1 优化方法
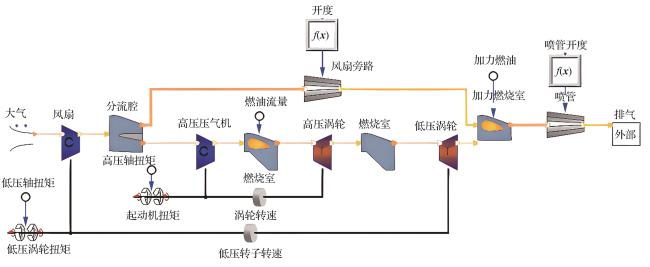
1.1 发动机模型建立
1.2 发动机控制系统模型搭建
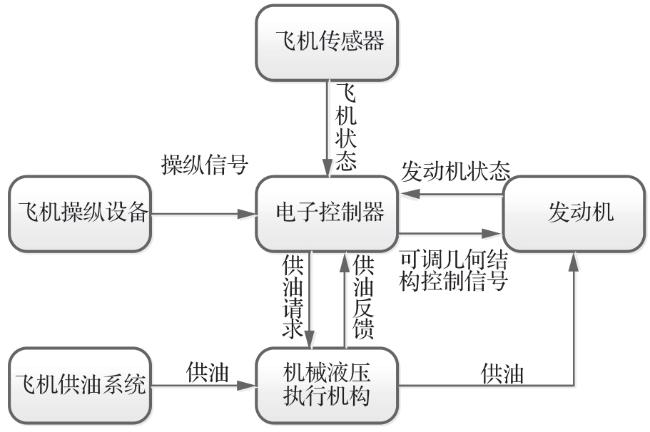
涡扇发动机的电子控制系统中,全权数字发动机控制(Full Authority Digital Engine Control,FADEC)系统通过计算机精确控制发动机燃油流量、空气流量、压缩比和喷射角度等参数。图2为FADEC系统架构示意图,通过实时数据分析和反馈调整,确保发动机在各种飞行条件下都能以最高效率和稳定性运行。
发动机控制模型中A8由对应调节机构控制,根据N 1相对转速按控制规律进行调节,A9面积则依照面积比进行相应调节。A8面积控制规律表示为
式中:c为控制规律增益系数;N 1r为风扇相对转速。N 1转速调节控制规律表示为
式中:d wf_N1为维持N 1转速所需要的燃油消耗率;N 1min为N 1最小转速;N 1max为N 1最大转速;TLA为发动机控制杆量;N 1fb为模型反馈的N 1实际转速;K N1为控制器增益。
N 2转速限制、燃烧室温度限制、压力限制控制规律表示为
式中:P lim为压力限制值;Pcomb为燃烧室压力;Pcombmax为燃烧室最大压力;Pcombmin为燃烧室最小压力。
实际转速N 2的限制转速N 2lim和温度限制T lim分别表示为
式中:Tcomb为发动机燃烧室温度;Tcombmax为燃烧室最大温度;d wf_lim为限制引起的燃油消耗率的变化;K p为压力限制控制器增益;K N2为N 2转速限制控制器增益;K T为温度限制控制增益。
综合燃油消耗率d wf表示为
1.3 后体阻力模型
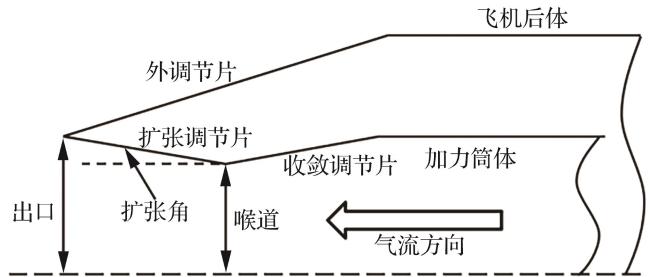
后体阻力包括由气流在喷管基底处的压力差产生的基底阻、气流在喷管尾部由于分离和再附着导致的尾流阻力和气流与后体表面之间的摩擦阻力。在发动机喷管的设计中,后体阻力和相应的阻力系数表示为
式中: 为后体壁面静压; 为环境压力; 为微小面积元; 为后体阻力系数; 为来流动压头; 为喷管最大后体面积。
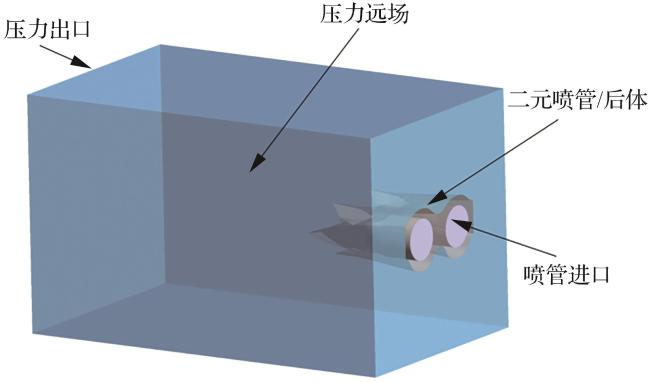
对计算域内重点关注的喷管壁面、喷管内流场等位置进行局部加密,所有壁面设置边界层网格,以便更准确的进行阻力计算,全局网格量450万。针对二元喷管/飞机后体耦合流场特性,采用基于有限体积法的N-S方程求解器,湍流模型为k-w SST,使用二阶流动精度格式进行方程求解。计算边界条件设置如图5所示,外流场进口为压力远场,由飞行高度、Ma确定压力远场所需参数;喷管主流为压力进口条件,由发动机性能程序计算的截面参数确定喷管进口温度、压力等边界参数;计算域出口为压力出口,由飞行高度确定边界参数,计算点选取典型点11 km、Ma=0.9和11 km、Ma=1.6。计算结果的收敛是以通道内监控面的流量、平均Ma及平均总压恒定且残差全部小于10-3为衡量准则。
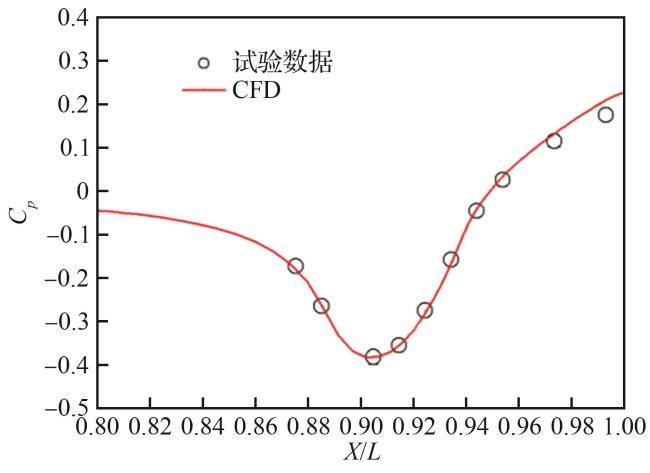
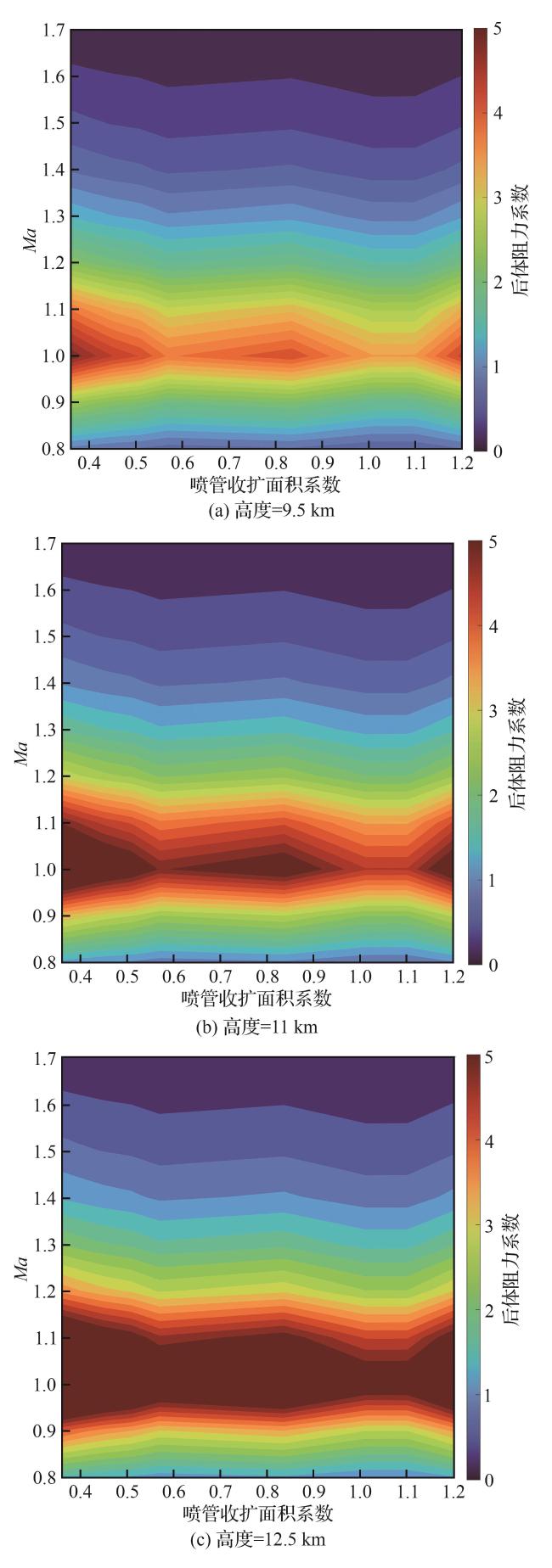
为表征后体阻力的动态变化,本节基于上述数值模拟分析结果,采用外推与验证相结合的方法,将其中一个状态点作为基准点推算整体后体阻力变化。同时,结合动压、最大面积对后体阻力特性进行推算,得到的后体阻力系数曲线如图7所示。由图可知,后体阻力系数在Ma=1时达到峰值。后体最大面积取决于发动机A9面积的收扩,其系数为1左右(基准面积)时,后体阻力系数最小。
1.4 六自由度非线性动力学模型及自动飞行控制
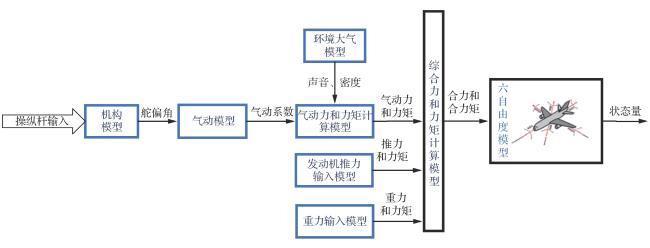
六自由度飞行动力学模型通过运动学和动力学模型模拟飞机3个平动(纵向、横向、垂向)和3个转动(俯仰、偏航和滚转)共6个自由度的瞬时参数及其变化情况。而后结合坐标转换矩阵,将飞机操纵量输入到执行机构和发动机。继而基于气动数据、飞机转动惯量、质量输入得到飞机的航迹、速度、加速度、姿态角、姿态角速度。图8为飞机六自由度飞行动力学模型架构。它执行机构模型、气动模块、环境大气模块、气动力和力矩计算模型、发动机推力输入模型、重力输入模型、综合力和力矩计算模型以及飞机六自由度模型等。仿真顺序为:平台向飞行控制模块发出调用指令,飞机进行机身状态初始化及飞行计划、机场信息的读取;根据初始信息进行第一个步长的计算,对飞机发出控制指令;根据飞机接受控制指令后的动态特性变化,将信号返回给控制脚本,进行下一步长的控制指令计算,飞机模型基于C++语言构建。
涉及的飞行过程包括等速爬升/下降控制、巡航控制、恒定的速度和坡度控制,以及滚转控制。
1) 等速爬升/下降控制
主要负责在飞机爬升或下降过程中保持恒定的速度。具体流程为:输入目标速度,滤波器处理后与实际速度进行比较,得出速度误差;速度误差经过积分处理,生成升降舵指令,并对该指令进行限幅处理以避免过度调整;通过升降舵指令生成目标俯仰角,与实际俯仰角进行比较,得出俯仰角误差;俯仰角误差经过放大处理生成升降舵角指令,最终控制升降舵执行,确保飞机以目标速度爬升或下降。
2) 巡航控制
用于保持飞机在巡航阶段的稳定飞行,包括速度、高度和航向的控制。在速度控制方面,通过目标速度与实际速度的比较生成速度误差,生成升降舵指令;通过目标高度与实际高度的比较产生高度误差,调整速度误差的计算。在航向控制方面,比较目标航向角与实际航向角得出航向角误差;航向角误差经过放大和转换,生成航向舵角指令,控制航向舵执行。
3) 恒定的速度和坡度控制
在着陆阶段,等速等坡度着陆控制器保证飞机以恒定的速度和坡度进行下降和着陆。在高度控制方面,通过目标高度与实际高度比较产生高度误差,生成俯仰指令;转换生成升降舵指令,控制升降舵执行。在速度控制方面,通过目标速度与实际速度的比较得出速度误差,同步调整俯仰角。着陆过程中,飞机以等速度、等坡度下降,在接近地面时用收杆抬头的动作帮助飞机平稳着陆。
4) 滚转控制
保持控制器确保飞机在飞行过程中保持稳定的滚转角。具体流程为:通过目标滚转角与实际滚转角的比较产生滚转误差;生成副翼指令,控制副翼执行,保持飞机的滚转角度。
1.5 基于差分进化法发动机喷管调节计划优化方法
1.5.1 优化问题描述
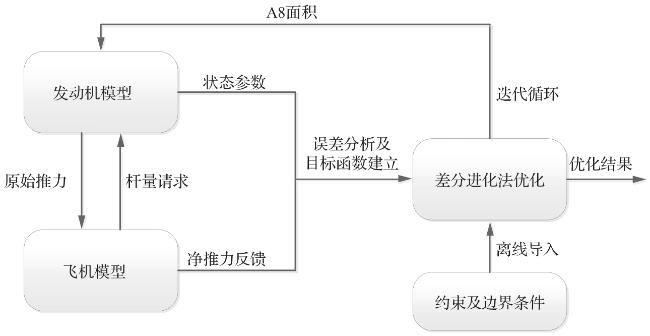
优化目标为提高安装推力。由于安装推力是总推力减去总阻力的差值,因此优化过程中需同时考虑推力和阻力的变化。通过数值仿真模型获得发动机推力和阻力并耦合至飞/发一体化仿真模型。建立A8面积及A9/A8面积比参数与发动机推力和阻力值的对应关系。为实现优化目标,采用差分进化法优化算法。它是一种基于种群的随机优化算法,通过不断对种群中的个体进行变异、交叉和选择操作来探索问题的解空间。差分进化法在处理带约束的非线性优化问题上具有较高的效率和精度。图9为所提优化问题架构图。具体优化步骤如下:① 明确优化目标:最大化安装推力;② 调用仿真模型:输入不同的A8面积,计算相应的推力和阻力;③ 选择优化算法:采用差分进化法,设置初始条件和约束条件;④ 优化迭代:利用差分进化法调整A8面积,迭代计算直至收敛;⑤ 结果验证:将最优A8面积代入仿真模型,验证安装推力的优化效果。优化过程中,开展参数敏感性分析,检查A8面积变化对推力和阻力的影响,确保优化结果的稳定性和可靠性。试验的初值为随机选取的A8控制律增益1.1倍,A9/A8面积比为1.5。设计点为A8控制律增益1倍,A9/A8面积比为1.2。自动飞行控制模块基于Python语言搭建,整体运行及优化环境基于飞/发集成仿真验证平台。
1.5.2 优化步骤描述
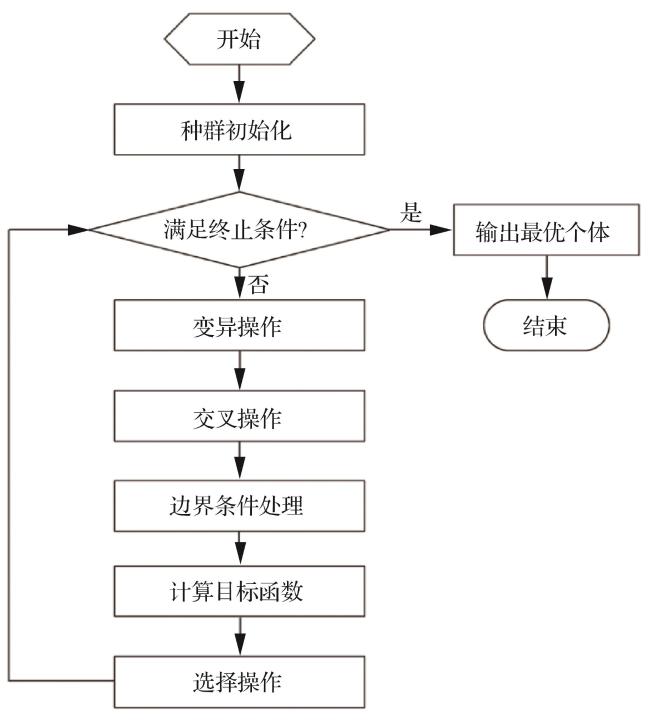
优化总体步骤如图10所示,约束条件表示为
式中: 为不等式约束; 为等式约束。
在第 次迭代中,目标函数 在当前点 处被近似为二次函数,表示为
式中: 为目标函数的梯度; 为正定矩阵,通常为Hessian矩阵或其近似。初始化种群中个体的各个维度,个体表示为
式中: 为个体在种群中的编号; 为进化代数;NP为种群规模。在差分进化法中,一般假定所有随机初始化种群均符合均匀分布。设参数变量的界线表示为
由此可得:
式中:rand[0,1]为在[0,1]之间产生均匀的实数。完成种群初始化后,进行编译操作,对于每个个体 ,基本差分进化算法的变异向量产生方式表示为
式中:要求随机选择的个体序号 、 、 互不相同,且与目标向量序号 也不能相同,所以必须满足 ;变异算子 是一个实常数因数,它控制偏差变量的缩放。对变异向量和目标向量进行总体交叉。为增加干扰参数向量的多样性,引入交叉操作,测试向量表示为
式中: 为[0,1]之间随机数发生器的第j个估计值; 为一个随机选择的序列来确保 至少从 获得一个参数;CR为交叉算子,其取值范围为[0,1]。变异、交叉操作:差分进化算法按照贪婪准则将试验向量与当前种群中的目标向量 进行比较。在下一代中,如果目标向量好,就选择目标向量;如果试验向量好,则选择试验向量。边界条件的处理:如果在变异过程中编译除了可行域外的解(可以理解为函数变量的定义域),即: 或 ,那么:
2 仿真结果与分析
完成了平飞状态(高度为11 km、Ma=0.9加速至Ma=1.2)、巡航状态(高度为11 km、Ma=0.9)和爬升状态(高度从5 km爬升至11 km) 3种典型工况下航空发动机喷管调节计划优化结果,以期获得基于差分进化法对航空发动机安装性能的提升效果。
2.1 平飞加速工况
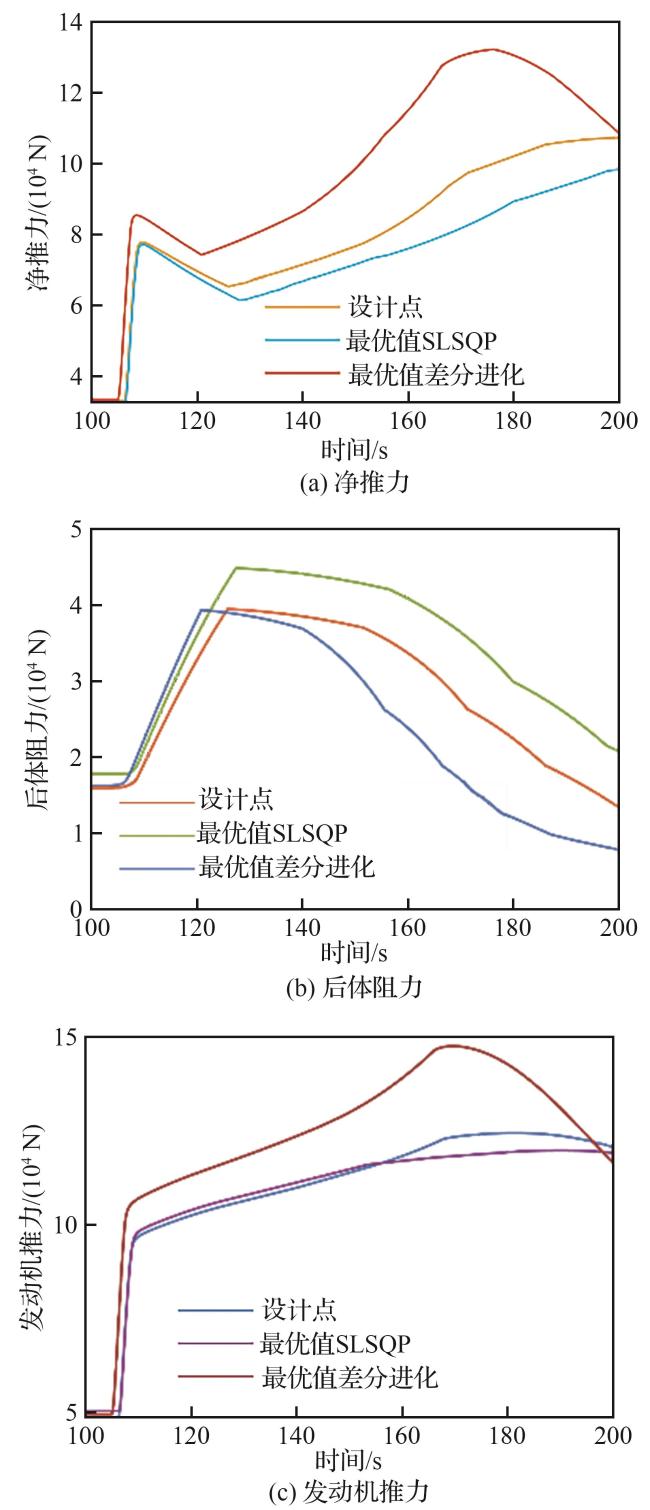
如图11所示,t=116 s时,发动机进行满油门杆加速,此时,发动机后体阻力、安装推力和净推力迅速升高,基于差分进化法获得的后体阻力小于基于序列最小二乘规划(Sequential Least Squares Programming, SLSQP )算法获得的,且前者的安装推力在平飞加速阶段大于后者,对应的基于差分进化法优化后的发动机净推力大于SLSQP算法。譬如相比SLSQP算法,t=116 s和t=180 s时,平飞加速阶段基于差分进化法分别实现瞬时净推力提升5.6%和45.6%;同时,平飞加速阶段(116 s<t<180 s),基于时间平均的净推力提高15.38%。这是因为SLSQP算法沿着扩大喷口面积方向寻找最大推力,容易陷入局部最优,而基于差分进化法则能实现从设计点至全局最优点的搜索求解。
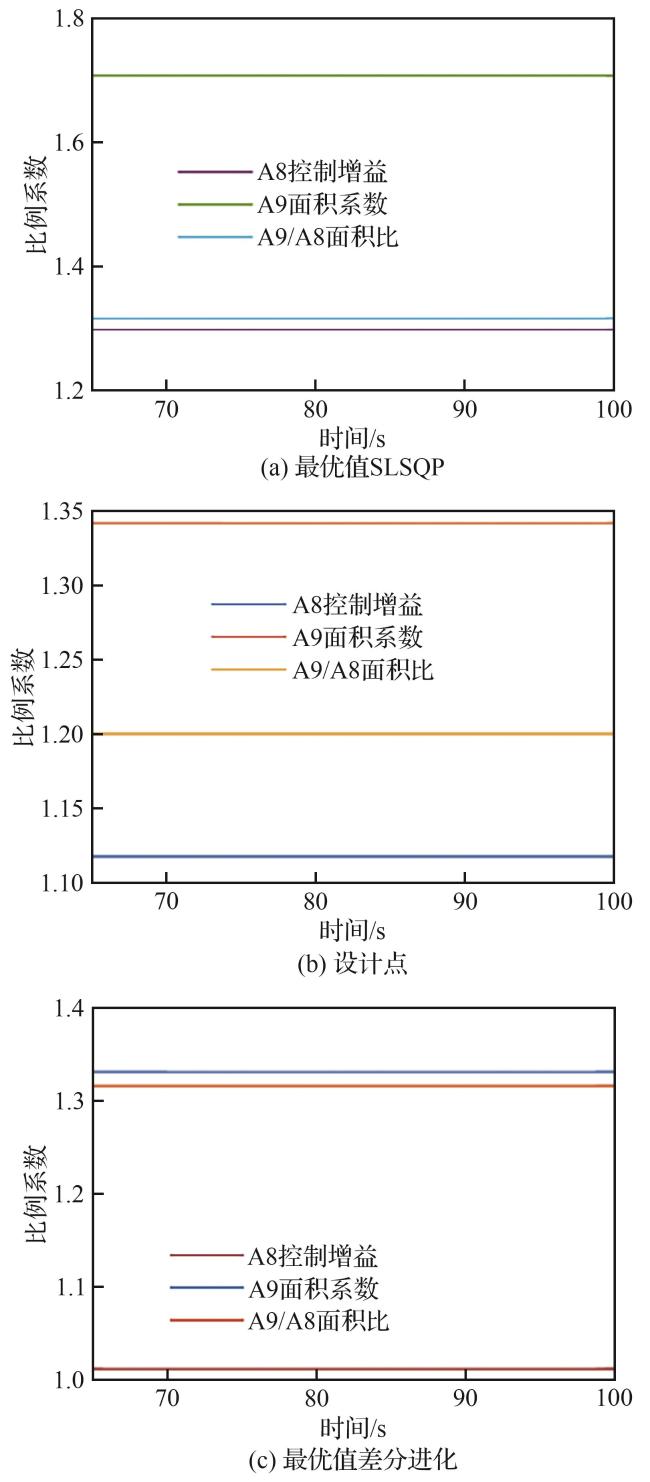
如图12所示,A8截面控制增益为1.01左右,A9/A8最优比值为1.32左右,与设计点相比,随着A8面积控制规律增益降低,A9/A8面积比则逐渐提高,优化后A8面积约为A9面积最大值的18.45%。平飞加速后,设计点下A9面积在1.36左右变化,SLSQP算法求得的最优A9面积在1.7左右变化,差分进化法求得的最优A9面积在1.32左右变化。差分进化法求解下A8控制律增益趋近于1,一定程度上说明当前使用的控制规律需要降低幅值,A9面积应缩小以提高净推力。综上所述,基于差分进化法通过合理优化A8面积控制规律及A9/A8面积比实现了平飞工况(高度为11 km、Ma=0.9加速至Ma=1.2)下,基于时间平均的净推力提高15.38%。相比SLSQP算法,基于差分进化法在平飞加速净推力优化场景下具有更好的全局最优性。
图13为平飞加速期间,飞机相关参数随时间的变化规律。发动机净推力增大的同时,相同俯仰角下,飞机升力增大,为保持恒定高度11 km飞行,飞控系统通过减小俯仰角和攻角来保证既定高度飞行,对应飞行高度始终保持不变。
发动机N 1转速与温度变化如图14所示,转速随飞机速度上升,涡轮前温度处于合理范围之内。加速状态下,高压压气机稳定裕度最大约为32.04%,最小约为21.96%,相比设计点最大上升0.38%,没有下降情况,满足稳定性要求。
2.2 巡航工况
获得了飞机巡航工况(高度为11 km、Ma=0.9)下推力、A8和A9截面面积及相关发动机参数的变化规律。飞机巡航阶段下,发动机燃油消耗为最重要参数。图15和图16为发动机推力、A8和A9截面面积随时间的变化规律。如图15所示,巡航阶段,发动机推力、后体阻力和净推力整体处于相对平稳的状态,且随时间变化幅度较小。与平飞加速阶段不同的是,高度为11 km、Ma=0.9巡航状态下,发动机后体阻力和推力的差值整体更小。基于差分进化法优化后获得发动机推力次优点及后体阻力次优点,与之对应的是,SLSQP算法获得发动机后体阻力和推力的局部最优点。综合而言,基于差分进化法获得发动机净推力大于SLSQP算法。究其原因,亚声速下后体阻力大于跨声速过程后体阻力,在保证前飞速度相同时,产生的后体阻力更小。基于差分进化法获得的发动机净推力更大,对应的燃油消耗率更低。如图16所示,基于差分进化法获得的最优A8控制律增益为1.09,最佳A9/A8面积比为1.316,优化后A8面积约为A9面积最大值的18.45%。巡航状态下求得的A8、A9截面参数与平飞加速状态结果基本一致。
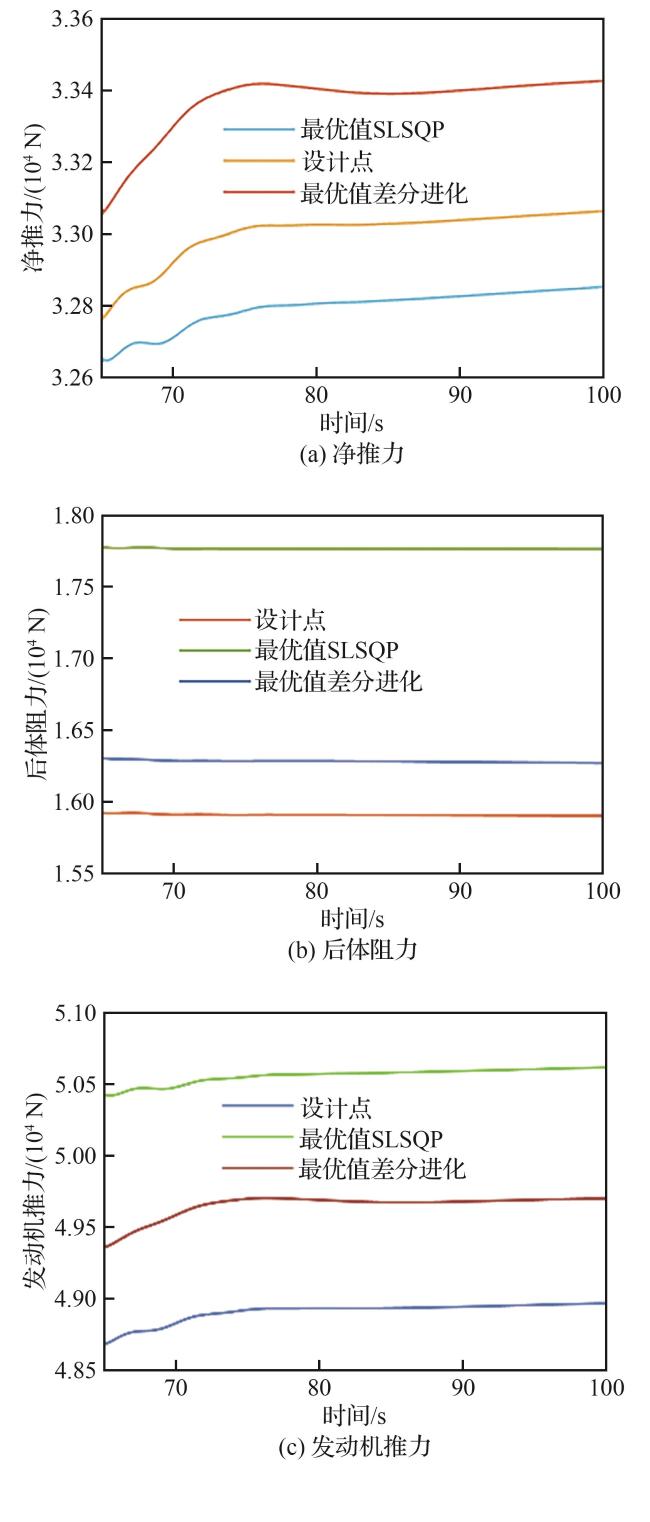
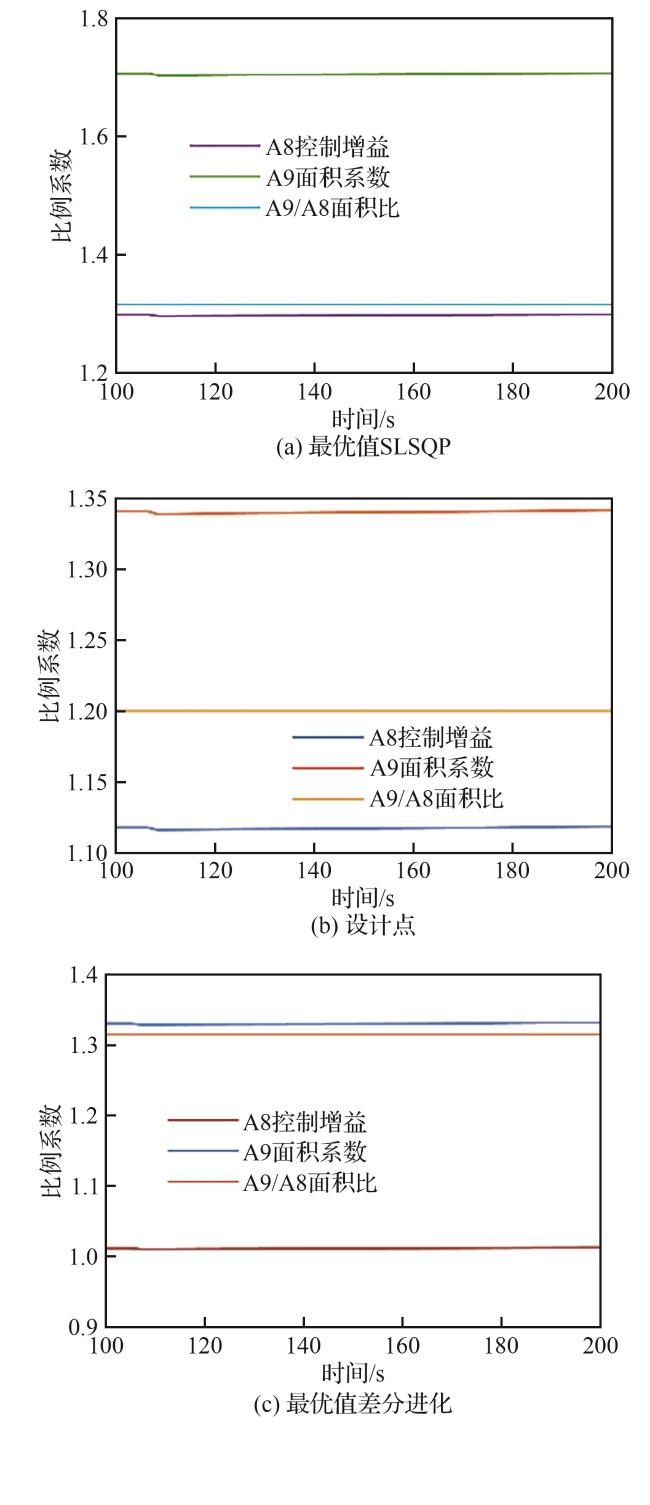
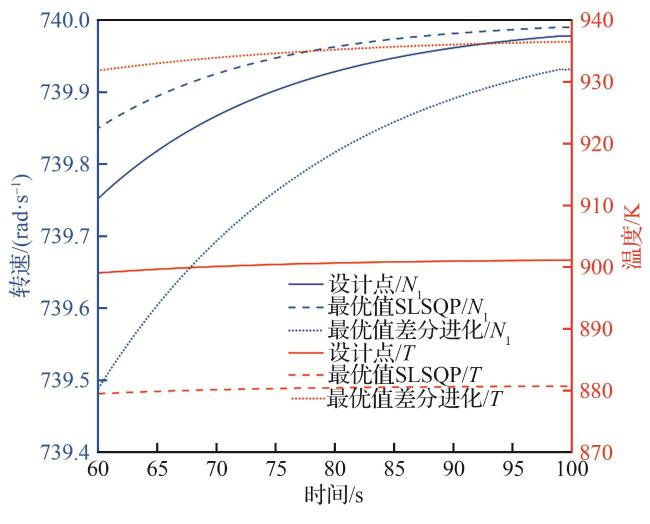
图17为高度为11 km、Ma=0.9巡航工况下飞机相关参数随时间的变化规律。与SLSQP算法相比,基于差分进化法获得的巡航Ma与设计Ma更为接近。飞机高度为11 km,t>85 s后达到相对稳定的飞行姿态,对应的攻角和侧滑角随时间变化幅度小于2%。图18为平飞巡航过程发动机燃油消耗量随时间的变化规律。65 s<t<100 s时,发动机转速处于相对平稳的状态,燃油消耗量随时间线性升高,基于差分进化法获得的油耗最低,设计点油耗小于基于SLSQP算法。这是因为基于差分进化法获得的后体阻力较小,相同净推力前提下,对应燃油消耗量最低。基于差分进化法优化A8面积控制规律和A9/A8面积比后,平飞巡航下燃油消耗最大降低6.88%。如图19所示,发动机N 1转速变化平滑,涡轮前温度约为950 K。巡航工况下,高压压气机稳定裕度最大32.04%、最小21.96%,相比设计点最大上升0.38%,没有下降现象,满足气动稳定性要求。
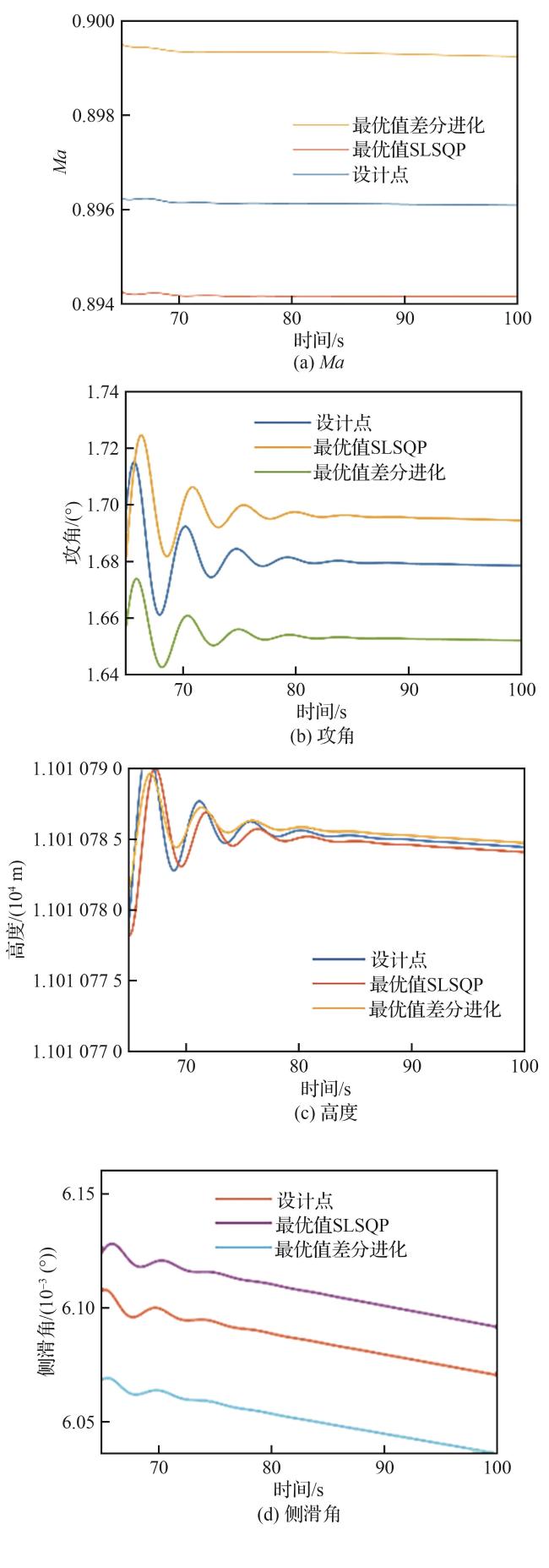
图 17 巡航状态下飞机相关参数随时间的变化规律Fig.17 Temporal variation characteristics of aircraft operational parameters during cruise phase |
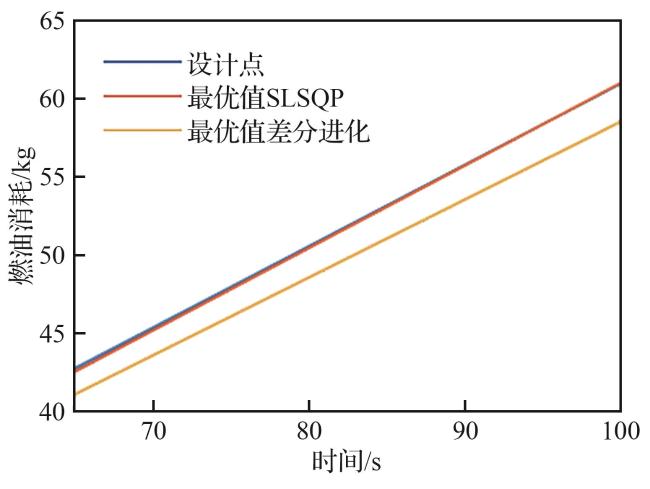
图 18 巡航状态下发动机燃油消耗量随时间的变化规律Fig.18 Temporal variation characteristics of engine fuel flow during cruise phase |
2.3 爬升工况
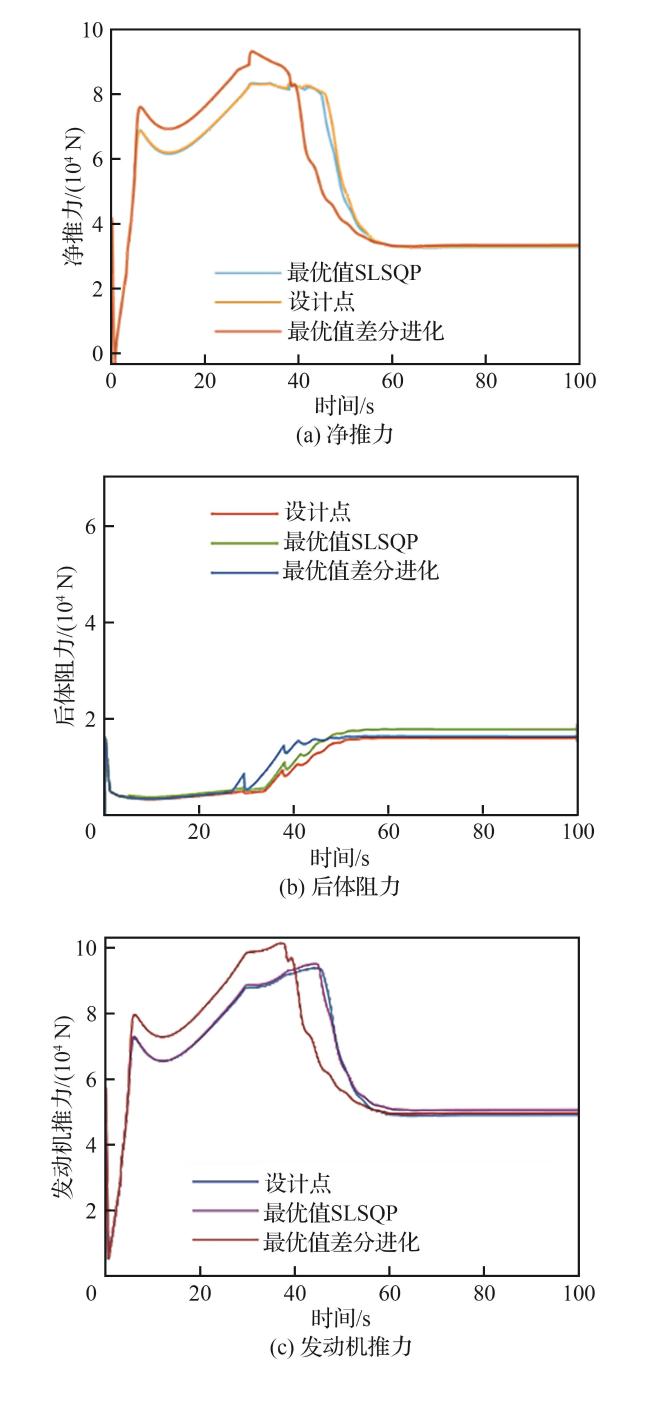
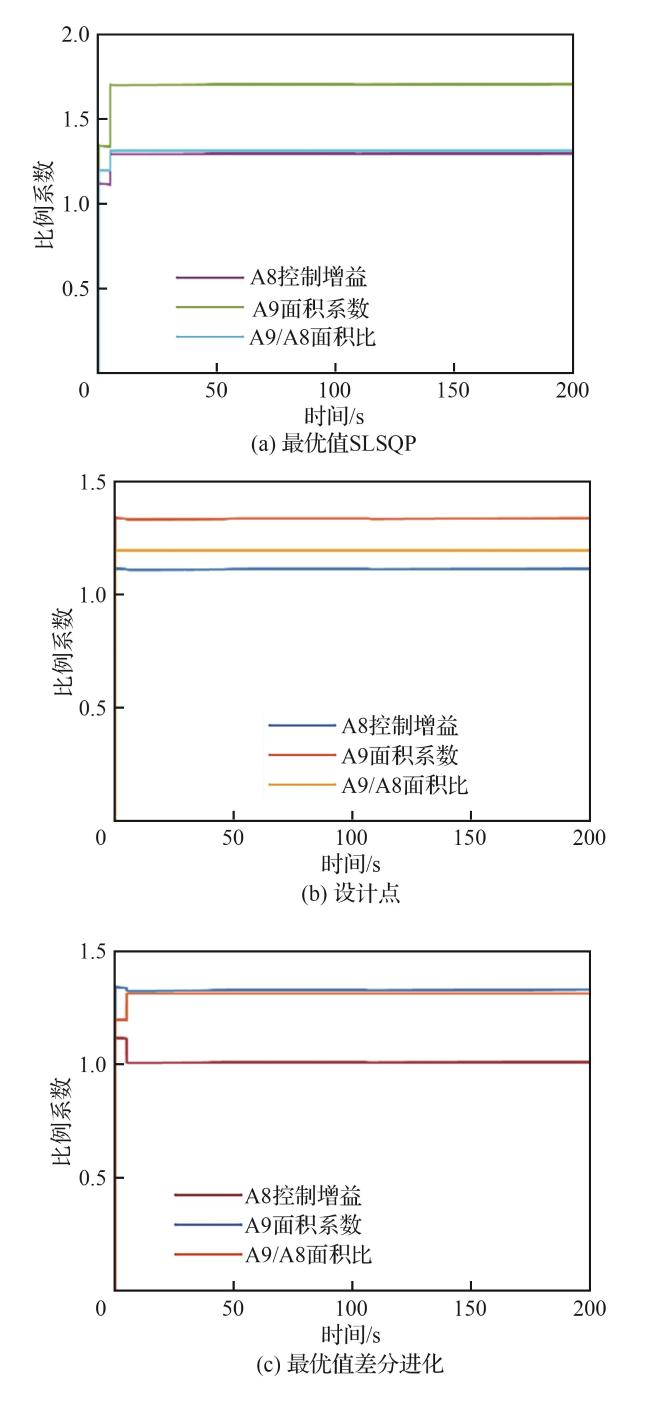
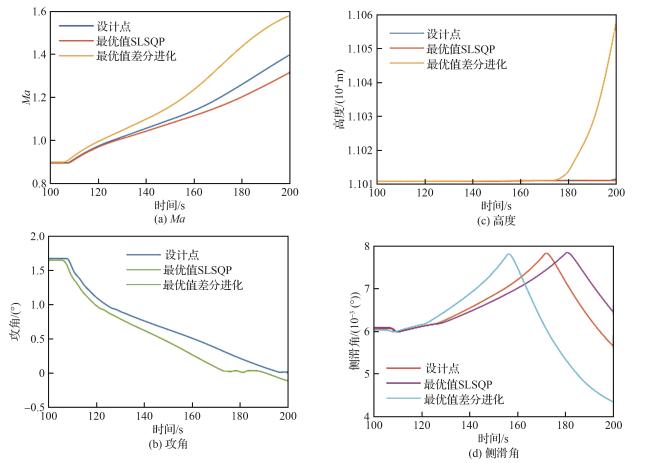
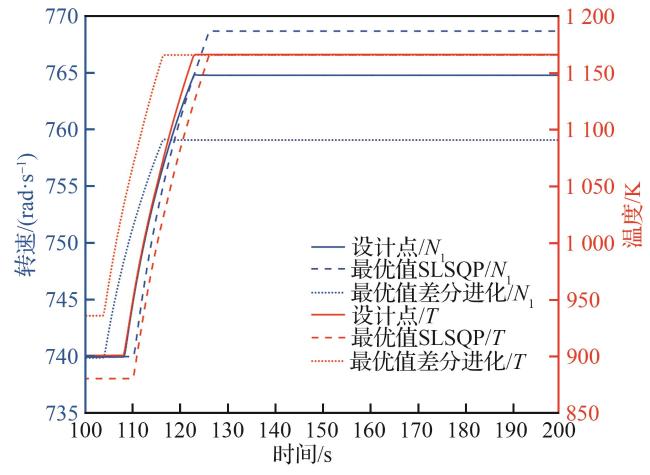
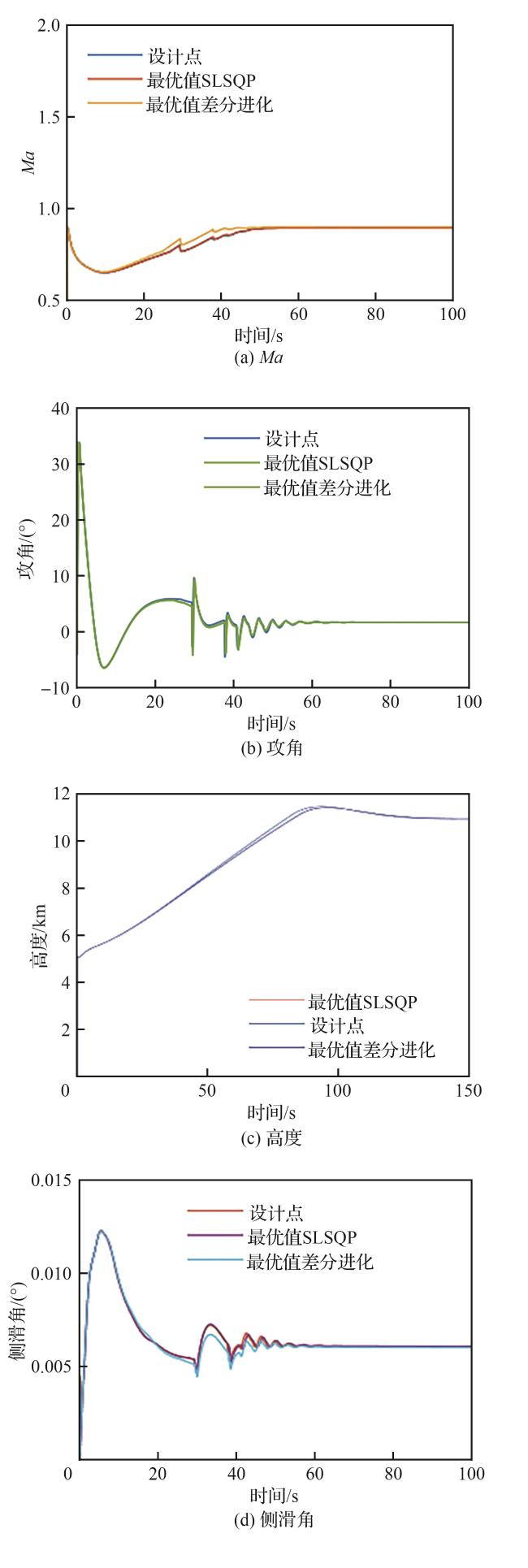
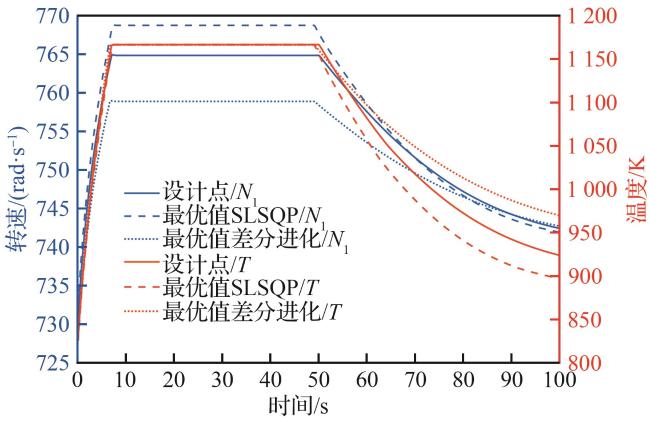
图22为飞机相关参数随时间的变化规律图。爬升过程中,基于差分进化法和SLSQP算法获得的Ma和攻角随时间的变化曲线与设计工况基本一致。但是,侧滑角存在较大差异。这是因为爬升过程中大水平发动机推力影响了飞控系统对飞机侧向状态的保持能力。爬升过程中,基于差分进化法得到的最优A8控制律增益为0.9,最佳A9/A8面积比为1.306,优化后A8面积约为A9面积最大值的18.37%。相比SLSQP算法,基于差分进化法合理优化A8面积控制规律及A9/A8面积比,能够使爬升阶段下平均净推力最大提高12.36%。从0 s到110 s,发动机转速上升,在接近11 km高度后转速逐渐下降,这使得发动机整体能耗低于设计点。发动机N 1转速及涡轮前温度相比巡航状态数值更高,如图23所示,爬升段与平飞加速段量级相似,未出现温度、转速超限的异常现象。爬升过程高压压气机稳定裕度最大约为31.54%、最小约为22.44%,相比设计点稳定裕度最大下降0.4%、最大上升0.09%,满足气动稳定性要求。总体来说,飞行基本参数在爬升过程中与设计点差异较小。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
3 结 论
开展了基于差分进化法的航空发动机喷管调节计划优化方法研究,获得了考虑安装推力的航空发动机喷管调节计划。建立了融合关键部件特性数据的发动机机理模型,基于耦合二分法的动态数值解析方法,实现了发动机稳定裕度的实时评估,获得了平飞加速、巡航状态和爬升状态3种典型工况下航空发动机A8面积控制规律和A9/A8面积比优化结果,主要工作和结论如下:
1) 通过飞/发联合仿真模型与飞行控制系统模型数据交互,实现飞/发一体化联合仿真;利用差分进化法在保证气动稳定性条件下,确定不同工况下安装推力最优的A9/A8面积比及最优A8面积控制规律。建立了基于差分进化法的发动机喷管调节计划优化方法。
2) 获得了平飞状态(高度为11 km、Ma=0.9加速至Ma=1.2),巡航状态(高度为11 km、Ma=0.9)和爬升状态(高度从5 km爬升至11 km)3种典型工况下航空发动机喷管调节计划优化。平飞状态下,通过调节喷管控制律增益及面积比,净推力提高约15.38%;巡航状态下,优化的控制律增益和面积比参数使得燃油消耗率相比设计点降低6.88%;爬升状态下,相比设计点实现发动机净推力提高12.36%。证明了基于差分进化法可提高发动机净推力,减少燃油消耗。
3) 将差分进化法与SLSQP算法进行了比较,研究发现,针对喷管调节计划的优化,序列最小二乘规划在寻优过程中具有寻优速度快的优势,针对平飞加速、巡航、爬升3种工况的迭代次数分别为82次、82次、46次,但容易陷入局部最优;基于差分进化法需要多次迭代,分别为351次、258次、256次,但其具有较好的全局最优性表现,可为提升飞机安装推力提供理论方法和技术指导。