
直升机在军事和民用领域具有广泛的应用价值,相比于固定翼飞行器,直升机特有的垂直起降的能力使其在军事、民用等领域都发挥了不可替代的作用[1],特别是在沙漠、戈壁等复杂地形环境中执行任务时表现出色。然而,在多风沙的环境下,直升机在贴地飞行时旋翼下洗流会卷起沙尘等颗粒,在直升机周围形成遮挡飞行员视线的沙尘云,即沙盲(Brownout)现象[2-5]。沙盲现象不仅会对直升机的机械部件造成磨损和腐蚀[6-7],而且可能影响飞行员的操作视野,严重威胁了飞行安全。因此,抑制沙盲的旋翼设计已成为提升直升机在复杂环境中飞行作业安全性的关键问题。
目前,直升机“沙盲”研究方法主要有数值计算方法和试验方法这2类,其中,数值计算方法主要由基于计算流体动力学(Computational Fluid Dynamics, CFD)方法的直升机近地面干扰流场计算方法和拉格朗日沙粒跟踪方法耦合构成[8]。胡健平等[9]基于雷诺平均方程和Menter剪切应力输运(Shear-Stress Transport, SST)k-ω湍流模型,通过编程接口耦合了离散元模型,计算了沙尘颗粒在流场中的运动和分布,并与试验结果对比,验证了数值方法的可靠性。同时,分析了流场与沙尘颗粒之间的耦合关系,研究了沙尘云的形成机理。结果表明,流场中大部分颗粒只能在地表随流场扩散而不能被卷起,位于桨盘平面下层区域的沙尘颗粒以径向运动为主。以上研究表明,沙盲现象的形成与旋翼近地干扰流场特性密切相关,并且验证了CFD与离散单元法(Discrete Element Method, DEM)在沙盲计算中的有效性。谭剑锋等[10]建立了基于离散动力学的DEM模型和沙粒-流场耦合模型,并嵌入了旋翼黏性涡粒子和黏性地面气动模型,研究了旋翼悬停和前飞状态下沙盲形成特性。结果表明,旋翼桨尖涡与地面干扰形成地面射流,推动沙粒移动堆积,诱发沙粒碰撞起跳等现象。
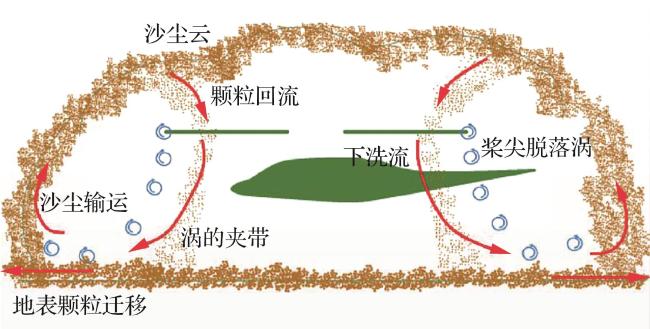
在试验研究方面,Lee等[11]基于粒子图像测速(Particle Image Velocimetry, PIV)法,观察了由旋翼引发的近地流场中沙尘扬起和湍流形成过程。随着对沙盲问题的深入研究,研究人员发现旋翼桨尖涡和黏性地面会显著影响旋翼近地流场特性[8,12-13]。Nathan和Green[14-15]结合PIV和高速摄影技术开展了模型旋翼扬沙试验研究。研究发现,影响沙尘扬起的关键参数是旋翼桨尖涡的强度、旋翼下洗流速度和尾流频率。Bradley[16]和Sydney[17]等基于试验方法,研究了地效影响下的旋翼桨尖涡对沙尘扬起的影响过程。研究结果表明,旋翼桨尖涡冲击地面会增大地面射流的强度,地面沙粒在地面黏性边界层和重力作用下发生径向跃移,同时桨尖涡的涡旋运动会对扬起的沙尘产生二次夹带作用(如图1 [9]所示)。
为了对沙盲现象进行抑制,Whitehouse等[18]开展了以降低桨尖涡强度为目标的旋翼优化设计,结果表明,在桨叶后缘布置小翼可以减小桨尖涡的强度。Milluzzo和Leishman[19]基于试验方法,研究了旋翼桨叶扭转对地面射流的影响。研究发现,相比于无扭转桨叶,增加桨叶扭转角会使旋翼下洗流更早地冲击地面,地面射流速度增加,扬沙外扩半径增大,从而减小飞行员视野盲区。意大利与英国联合研制的EH-101直升机应用了英国试验旋翼项目(British Experimental Rotor Programme, BERP)桨叶,在沙漠地区展现出较强的扬沙抑制效果。
综上所述,增加后缘小翼和增大桨叶扭转角可以通过减小桨尖涡的强度或增大地面射流速度来抑制沙盲现象的形成。但是增加小翼会增加桨叶结构设计的复杂性,加大负扭转可能会引起动载荷的增加,在实际工程中应用难度较大,因此,笔者尝试通过分析桨叶下反、前凸后掠尖削等气动布局参数的影响,以工程最小代价开展扬沙抑制的旋翼布局设计。基于近地面干扰流场的CFD方法,并充分计入沙粒DEM模型[20-21],首先开展了UH-60A标模旋翼的气动性能和扬沙特性仿真计算,与试验结果进行了对比,验证了所提综合建模分析方法的可靠性。随后,在保持旋翼气动性能较优的基础上,进行桨叶下反和桨尖形状等布局参数对直升机近地面流场特性的影响分析,并分析了不同旋翼方案的沙盲抑制能力。
1 计算方法和模型
1.1 计算网格和模型
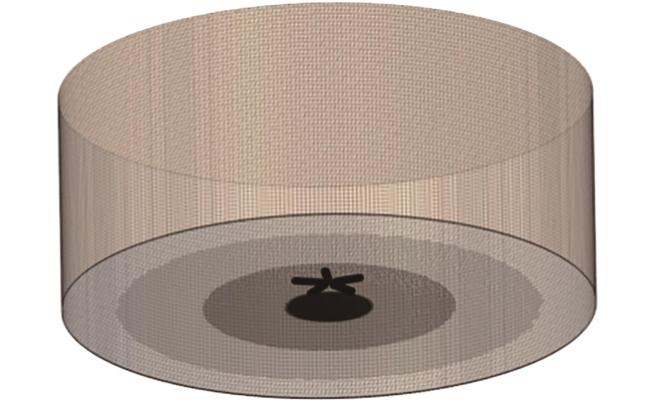
采用重叠网格方法计算有地效环境下的旋翼非定常流场,通过运动嵌套技术准确描述桨叶的运动,在流场计算时桨叶网格和背景网格之间相对位置不断变化,通过洞边界单元识别和贡献单元搜索实现嵌套区域的插值迭代,从而完成信息交换。
1.1.1 桨叶模型
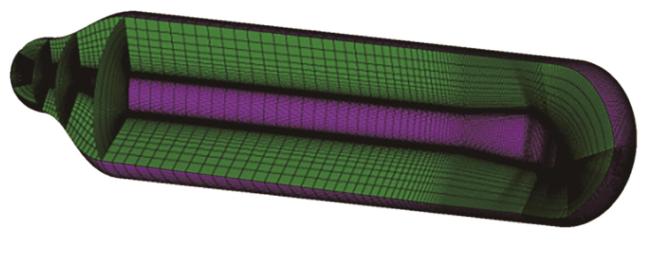
桨叶剖面翼型选择CRA系列翼型,旋翼半径R为1.5 m,剖面基准弦长C为0.094 m,桨距角为9°。为了更好地模拟桨叶表面流场细节和桨尖涡结构,桨叶外形采用结构网格进行捕捉,桨叶表面边界层第1层网格单元高度为1×10-5 C,并以1.2的增长率向外增长,同时在流动敏感的桨尖区域进行了网格加密,单片桨叶的网格单元总数约为160万,桨叶网格如图2所示。
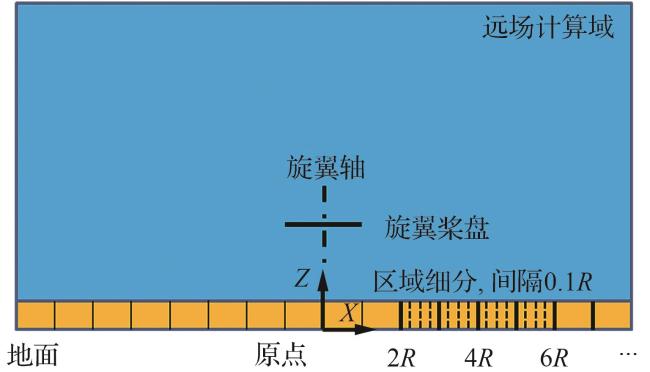
1.1.2 空间远场模型

1.2 计算方法
沙盲是由沙粒和旋翼流场构成的两相流动,因此,在进行沙盲计算时,需要考虑沙粒和流场的耦合作用。由于沙床沙粒直径通常为80~100 μm,因此,微小尺度(<80 μm)的沙粒对流场运动影响较小,可以将其忽略,而大尺度的沙粒对流场运动影响较大。在此基础上,需要同步考虑流场对沙粒运动的影响。基于单向耦合模型,先计算得到旋翼流场气动力,再施加到沙粒动力学方程中,从而实现沙尘颗粒运动轨迹的仿真计算。
1.2.1 流场数值计算方法
采用基于求解雷诺平均纳维-斯托克斯(Reynolds-Averaged Navier-Stokes, RANS)方程的求解器对直升机旋翼非定常流场进行求解,对于密度基的耦合流体求解器,守恒积分形式的控制方程组为
式中:V为控制体;S为控制体表面面积;W为守恒变量;F C(W)为无黏通量;F V (W)为黏性通量;Q为源项。
1.2.2 沙粒离散动力学计算
沙云是由众多沙粒构成的,应用拉格朗日方法追踪沙尘颗粒的运动,从而得到沙云的形成特征。为了模拟大量离散沙尘颗粒的运动和相互作用,DEM在颗粒流系统分析中得到广泛应用。基于离散动力学理论和DEM,沙粒运动学方程由牛顿第二定律得出:
同时考虑沙尘颗粒的旋转:
式中: 分别为沙粒质量、速度、转动惯量和角速度; 分别为沙粒力矩矢量、沙粒流场气动力、沙粒碰撞力和沙粒重力。
基于Hertz-Mindlin模型,沙粒碰撞力的法向分量和切向分量分别为
式中: 分别为沙粒的当量弹性模量、半径、质量、法线方向的变形量、单位矢量、相对法向速度、法向刚度和等效刚度; 分别为沙粒的切向变形量、单位切矢量、相对切向速度和切向刚度。
沙粒流场气动力 可由沙粒阻力特性表示为
式中:CD 为阻力系数; 分别为流场密度和速度;A为沙粒面积。
所提沙尘运动计算方法已通过试验进行了验证[15],证明了沙尘运动轨迹的可靠性。
2 计算方法验证
2.1 网格无关性验证
考虑沙尘运动受旋翼流场特性影响较大,而旋翼流场细节的捕获与网格量强关联,利用国外UH-60A标模旋翼开展了网格无关性研究。表1给出了UH-60A标模旋翼参数。
表1 UH-60A标模旋翼参数Table 1 Parameters of UH-60A standard model rotor |
| 参数 | 数值 |
|---|---|
| 半径/m | 8.18 |
| 片数 | 4 |
| 基准弦长/m | 0.52 |
| 桨尖形状 | 后掠桨尖 |
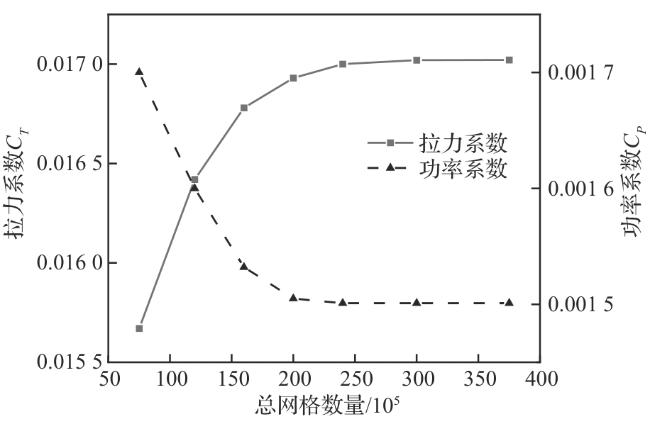
综合考虑计算效率与鲁棒性,将旋翼和背景域总网格数量最终控制在3 000万左右,其中单片桨叶网格数量约为160万,背景域网格数量约为2 000万。
2.2 无地效状态验证
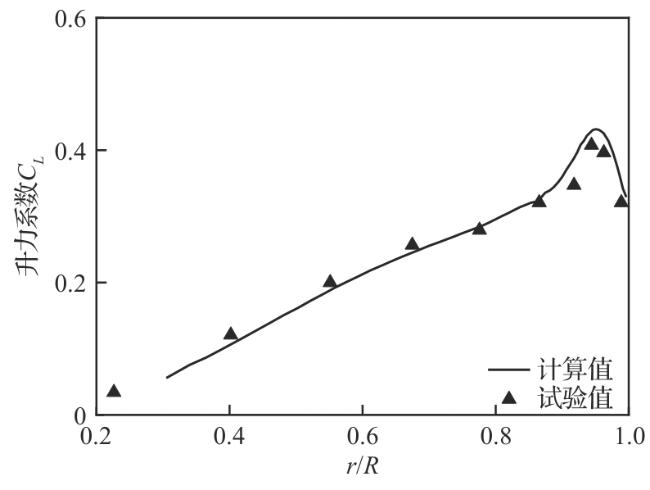
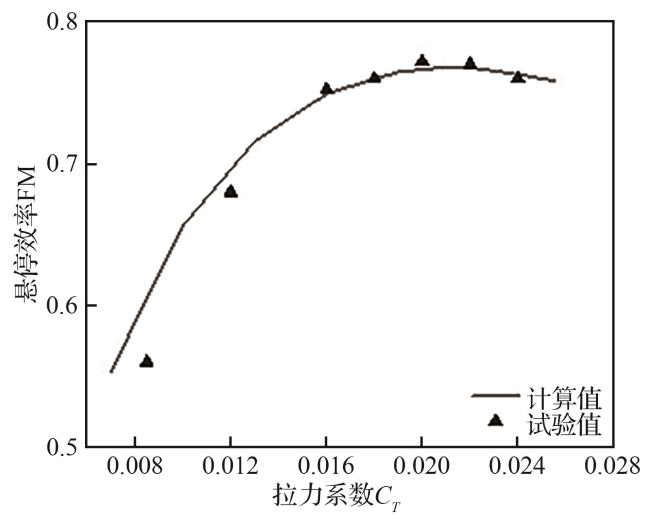
利用国外UH-60A标模试验数据对所提数值计算方法进行验证。图6和图7分别给出了无地效状态下单片桨叶升力系数CL 和旋翼悬停效率FM的计算与试验对比结果。其中,r表示桨叶径向位置,r/R表示桨叶径向位置与旋翼半径的比值。从图6可以看出,桨叶沿径向逐渐靠近桨尖时,升力系数先增大后减小,与试验值吻合较好。从图7可以看出,随着旋翼拉力系数的增加,旋翼悬停效率计算结果与试验值相比趋于稳定,在旋翼主要工作的拉力系数区间,计算值可以较好地模拟试验结果和规律。综合表明,旋翼流场网格生成策略可以较好地模拟桨叶表面压力分布,相应建模方法适用于旋翼在无地效(Out of Ground Effect, OGE)状态下的流场计算。
2.3 有地效状态验证
由于直升机在有地效(In Ground Effect, IGE)悬停时旋翼离地高度低,沙盲激起的概率更高,同步有针对性地开展了典型有地效状态验证。基于自主设计的1 m直径模型桨叶,开展了孤立旋翼有地效状态试验。模型桨叶参数如表2所示。
表2 试验模型桨叶参数Table 2 Blade parameters of experiment model |
| 参数 | 数值 |
|---|---|
| 半径/m | 0.5 |
| 片数 | 2 |
| 基准弦长/m | 0.078 |
| 扭转 | -12°/R |
| 桨尖形状 | 1∶3前缘抛物线后掠桨尖 |
试验中,旋翼转速为4 200 r/min,拉力系数为0.014,采用PIV系统对旋翼开展了近地面流场速度测量,如图8所示。设置旋翼处于不同工况,即离地高度h=1R,1.2R,1.4R,1.8R,以及不同方位角为0°,30°,60°,90°,120°,150°。
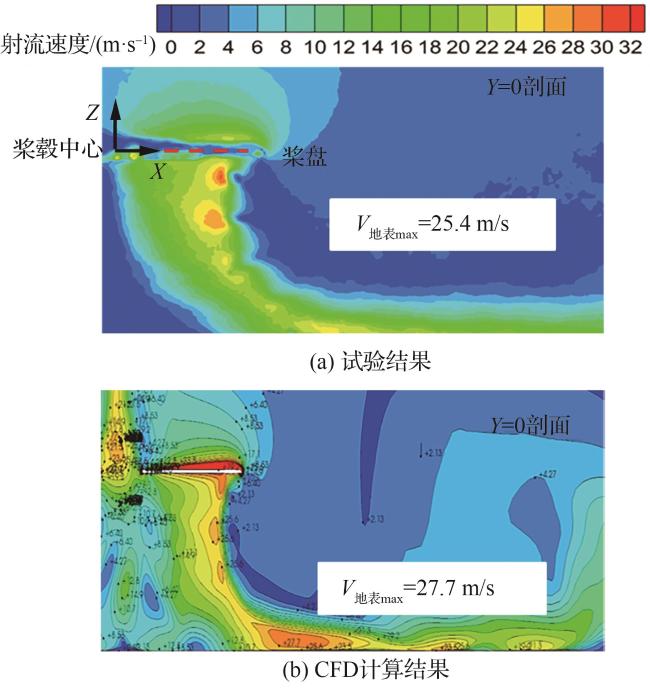
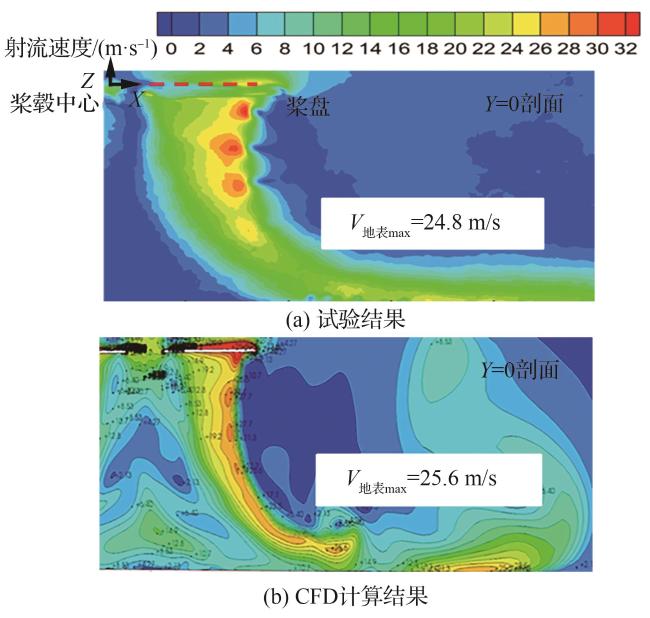
当旋翼旋转中心距离地面高度h=1R时,试验测得地面最大射流速度为25.4 m/s,数值计算得到的地面最大射流速度为27.7 m/s;当旋翼旋转中心距离地面高度h=1.4R时,试验测得地面最大射流速度为24.8 m/s,数值计算得到的地面最大射流速度为25.6 m/s。经分析,导致该误差的原因是数值模拟中忽略桨毂会导致桨根处产生喷泉效应,此误差是可以接受的[24],因此可以认为该数值计算方法能够为旋翼有地效扬沙计算提供准确的流场信息。
3 扬沙抑制的旋翼设计及优化
3.1 桨尖下反对扬沙抑制的影响
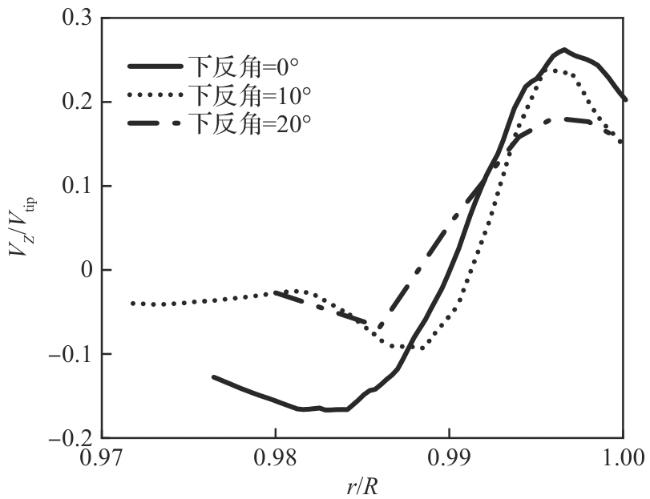
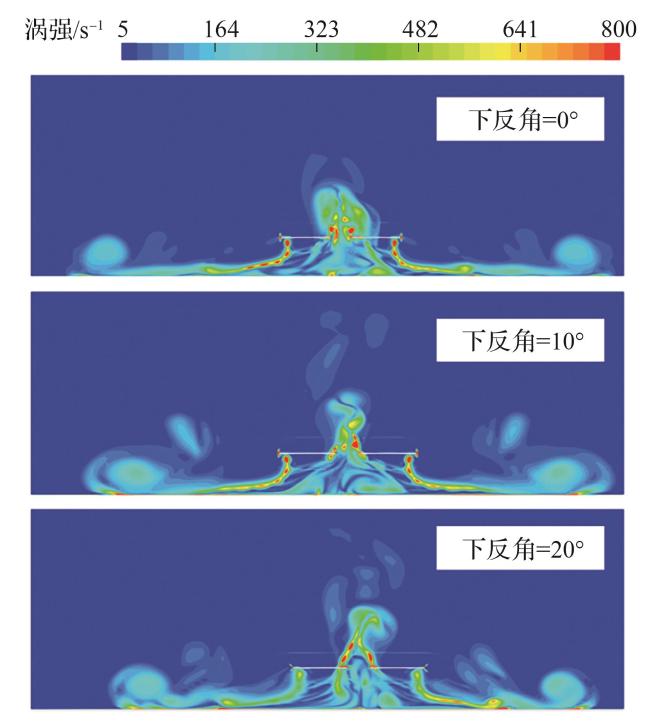
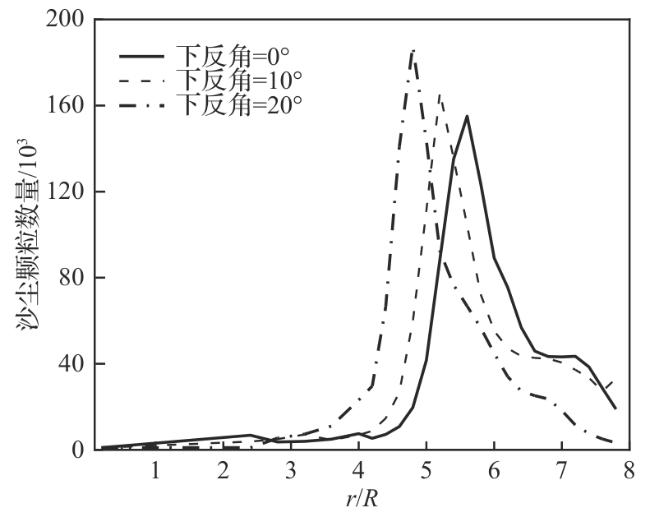
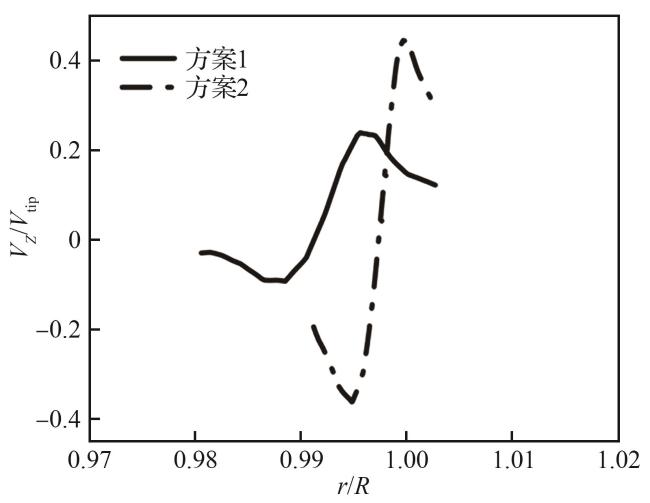
桨尖涡涡核半径越大、桨尖涡周向旋转速度的最大值越小,桨尖涡强度越低。根据图13给出的坐标系定义,图14给出了桨尖涡周向旋转速度对旋翼桨尖速度无量纲化后沿桨叶径向的变化曲线,其中VZ 表示桨尖涡当地流场速度沿Z向的分量大小,V tip表示桨尖速度。图14中,桨尖涡周向旋转速度的最小值与最大值径向距离的一半可表示桨尖涡的涡核半径,可见,桨尖下反角为0°时的涡核半径约为0.011R,桨尖下反角为10°时的涡核半径约为0.009R,桨尖下反角为20°时的涡核半径约为0.01R,3种桨尖的涡核半径相差不大。桨尖下反角为0°时的桨尖涡周向旋转速度峰值变化范围是-0.16~0.27,桨尖下反角为10°时的桨尖涡周向旋转速度峰值变化范围是-0.1~0.24,桨尖下反角为20°时的桨尖涡周向旋转速度峰值变化范围是-0.07~0.18。这表明随着桨尖下反角的增大,桨尖涡周向旋转速度峰值减小,桨尖涡涡强降低。
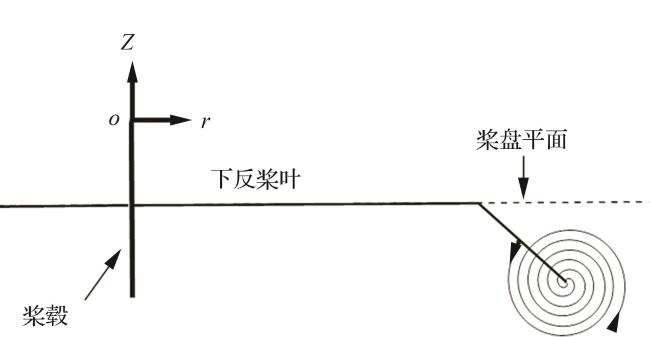
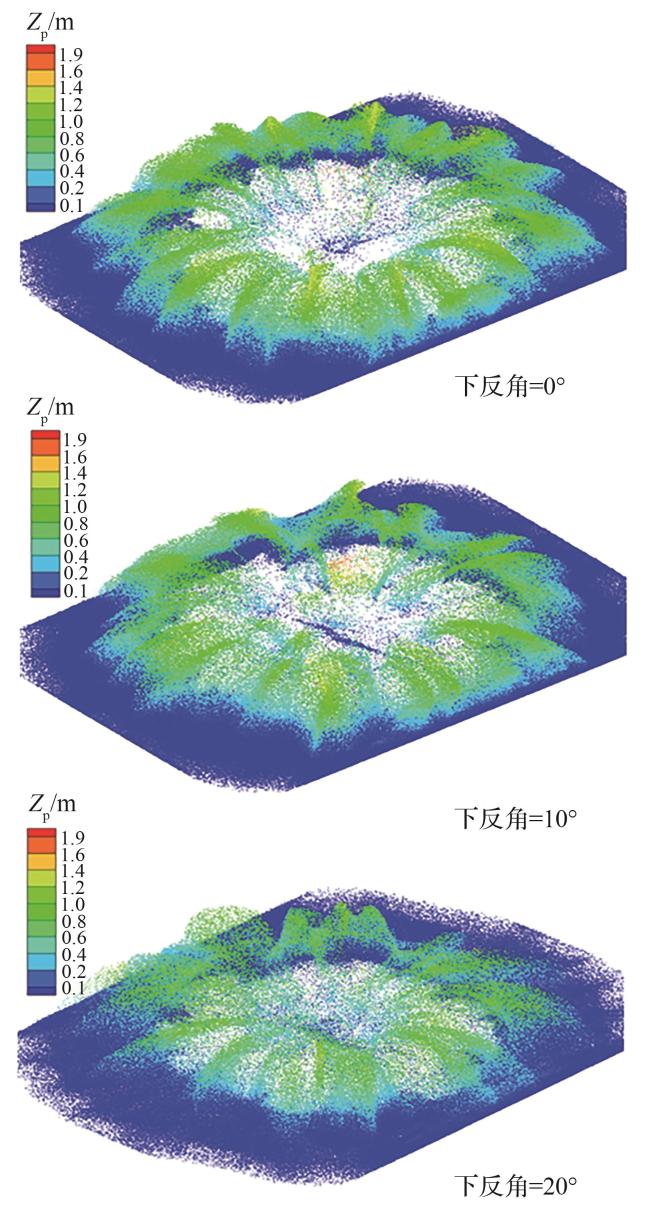
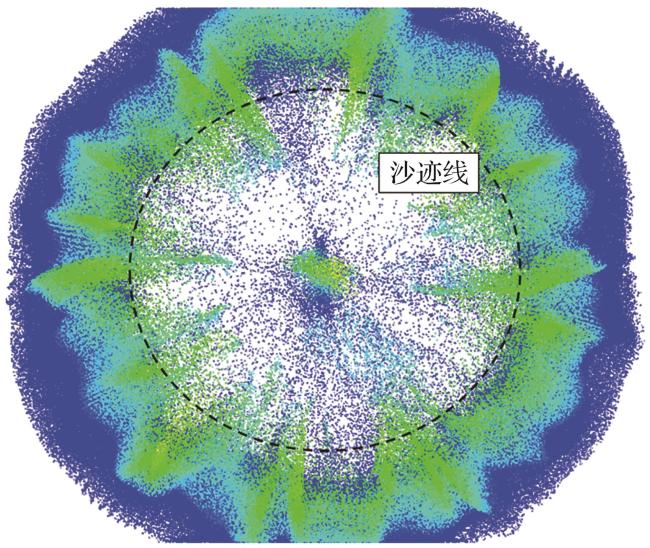
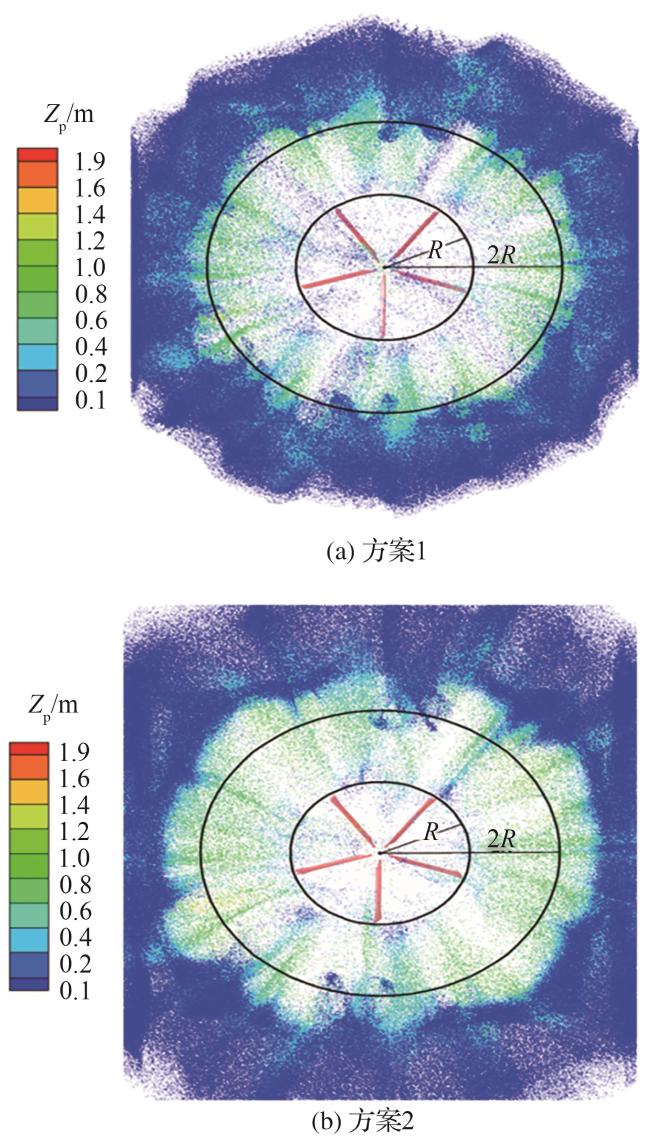
地面沙尘在向四周扩散过程中,受地面摩擦力和颗粒之间的相互作用,地面沙尘颗粒扩散速度逐渐降低,这使得在地面某一径向位置处沙尘颗粒逐渐堆积,最终在地面形成一圈环状的“沙迹线”,如图18中虚线所示。因此,近地面沙尘颗粒浓度最大的位置应集中在环状“沙迹线”处。
3.2 桨尖形状对扬沙抑制的影响
为了研究桨尖形状对扬沙抑制的影响,给出了目前通用性较强的前缘抛物线后掠和类BERP这2种桨尖外形,旋翼气动设计方案如表3所示。
表3 旋翼气动方案Table 3 Aerodynamic design schemes of rotor |
| 参数 | 方案1 | 方案2 |
|---|---|---|
| 半径/m | 1.5 | 1.5 |
| 实度 | 0.099 | 0.099 |
| 片数 | 5 | 5 |
| 桨尖形状 | 抛物线桨尖 | 类BERP桨尖 |
 |  |
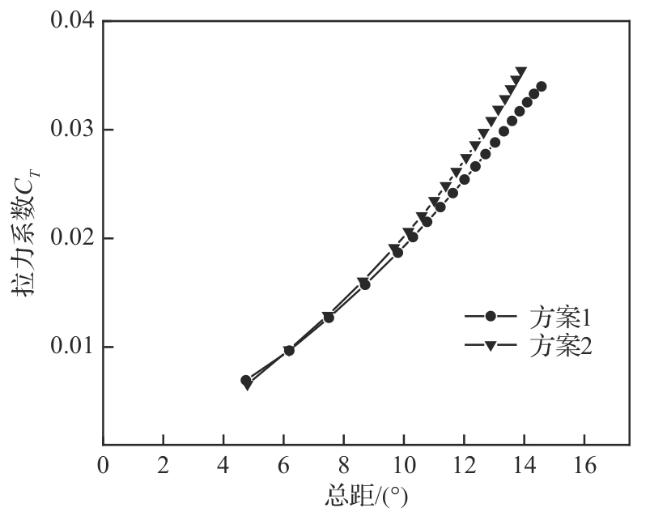
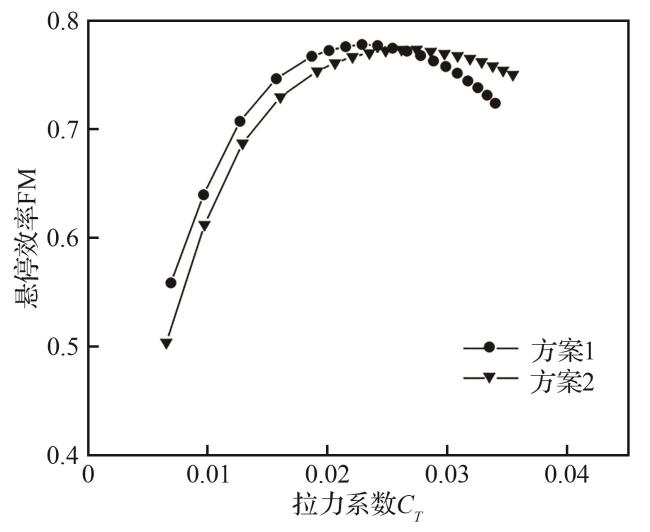
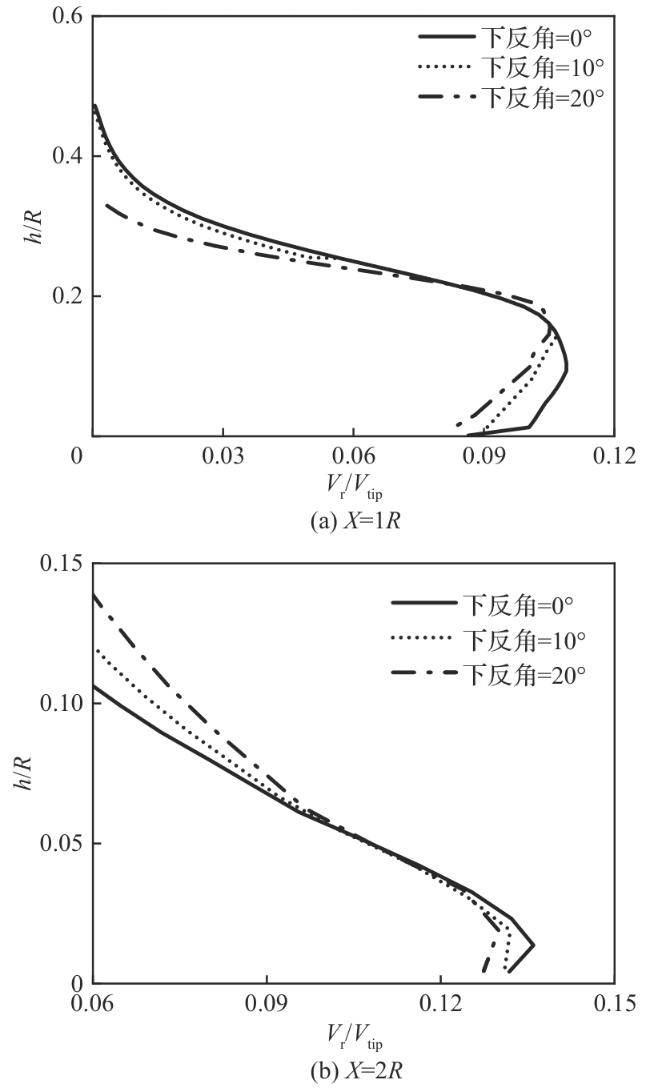
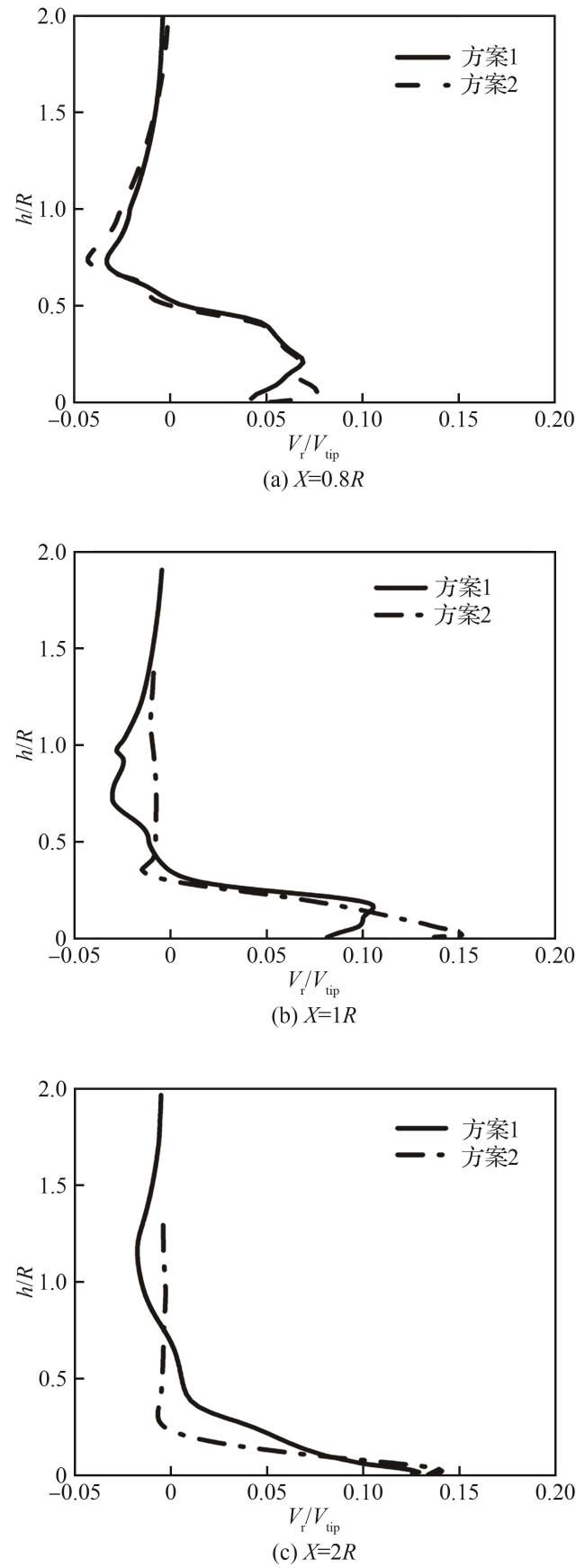
图23给出有地效悬停状态下不同方案的桨尖涡强度对比结果。图24给出桨叶不同径向位置X=0.8R,1R,2R处地面射流速度随高度的变化。从图23中可以看出,方案2桨尖涡涡强大于方案1。在地面射流的径向发展过程中,2种旋翼方案的径向速度峰值对应的高度逐渐减小,这一现象与试验结果一致[11]。在径向位置X=0.8R时,方案1和方案2地面射流速度大小基本一致。当径向位置增大到X=1R时,方案2地面最大射流速度为0.15,方案1地面最大射流速度约为0.1。这主要是受桨尖涡强度的影响,由于方案2桨尖的脱落涡强度较大,脱落涡冲击地面后,增加了地面射流的动能,使地面射流速度增大。随着径向位置的增大,在径向位置X=2R时,方案1地面射流速度略有增加,方案2地面射流速度基本保持不变。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
4 结 论
1) 减小桨尖下反角,桨尖涡强度增大,地面射流速度增大,使沙迹线外扩半径增大,扬沙抑制效果增强。
2) 在悬停状态下,相比于抛物线桨尖旋翼方案,类BERP桨尖旋翼方案的桨尖涡强度增大,悬停效率降低。同时,类BERP桨叶较强的桨尖涡与地面冲击后,增大了地面射流强度,使地面射流速度增加,沙迹线外扩半径增大,增加了驾驶员视野可视度。
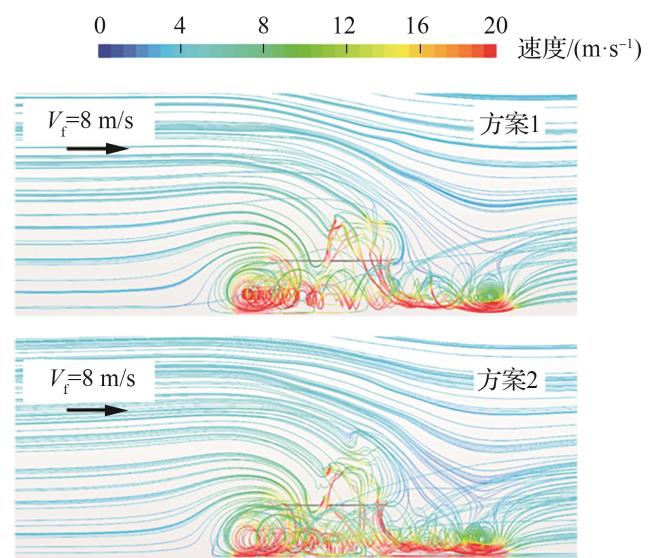
3) 小速度前飞状态下,相比于抛物线桨尖旋翼方案,类BERP桨尖旋翼方案的地面涡强度较弱,对地面沙尘扬起有较好的抑制效果,可以提高驾驶员的视野范围。