
1 流动数值模拟方法及其验证
1.1 数值模拟方法
1.2 数值模拟精度验证
1.2.1 DLR-F6标模跨声速流动数值模拟验证
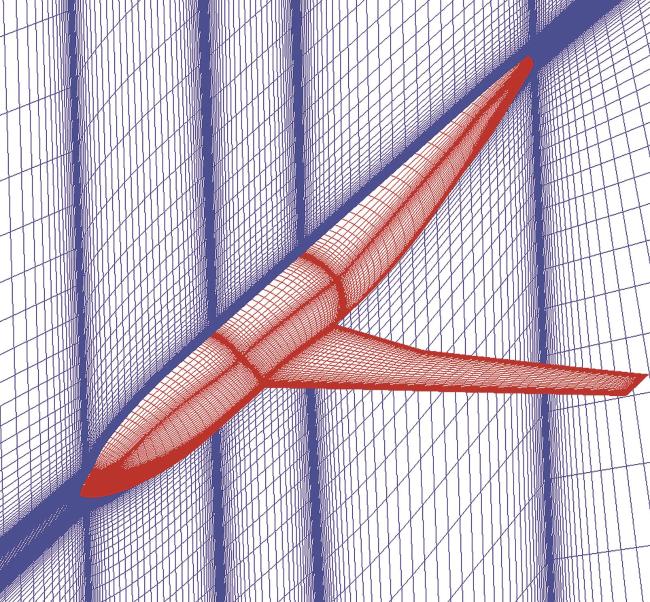
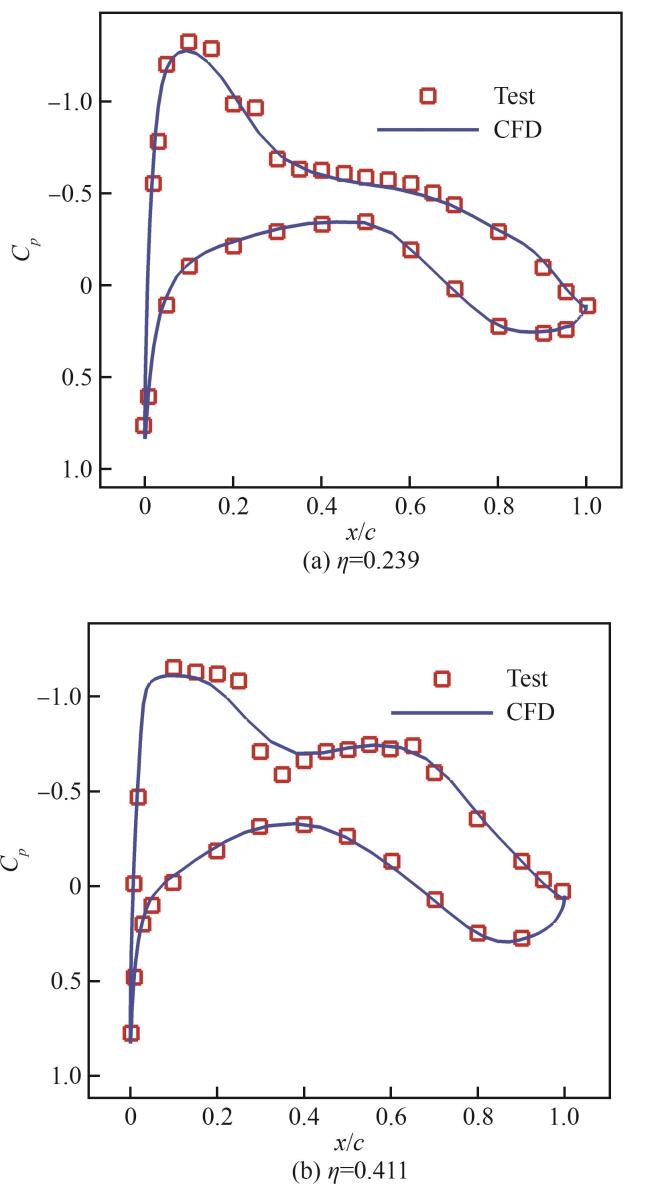
图 2 机翼不同展向站位压力系数分布的计算值与试验值对比(Ma=0.75, Re=3.0 106)Fig.2 Comparison of computed pressure coefficient distribution and test data at different spanwise station of wing (Ma=0.75, Re=3.0 106) |
表1 DLR-F6翼身组合体的CFD计算值与试验值对比Table 1 Comparison of CFD computed values and test data of DLR-F6 body-wing configuration |
| 方法 | 迎角 | 阻力系数 | 俯仰力矩系数 |
|---|---|---|---|
| 试验 | 0.520 | 0.029 5 | -0.121 1 |
| 仿真 | 0.417 | 0.029 8 | -0.118 0 |
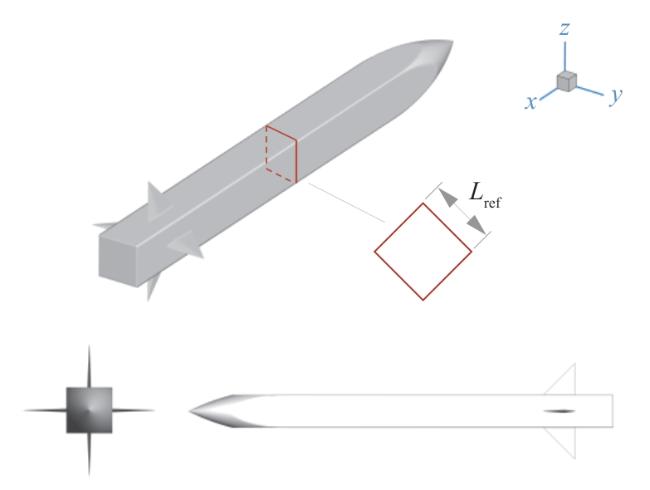
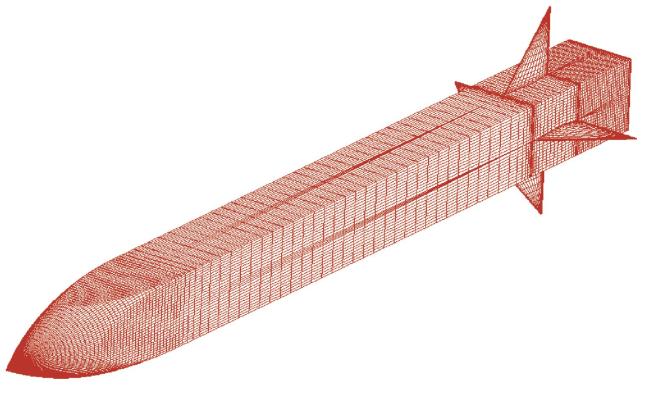
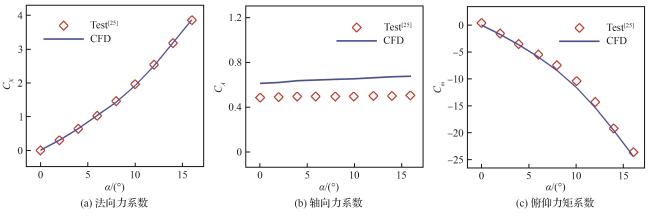
1.2.2 方形截面导弹超声速流动数值模拟验证
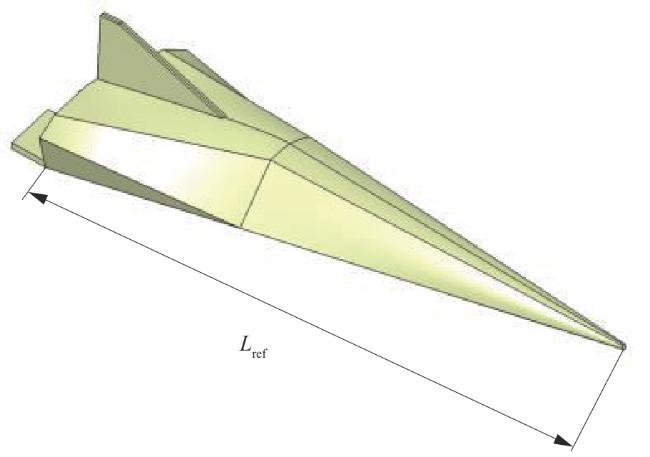
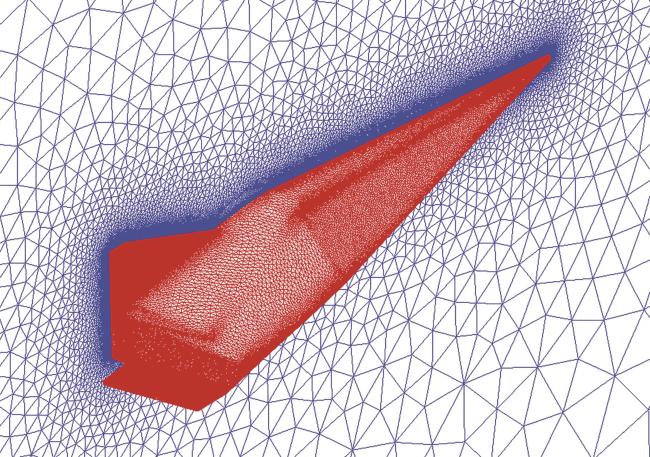
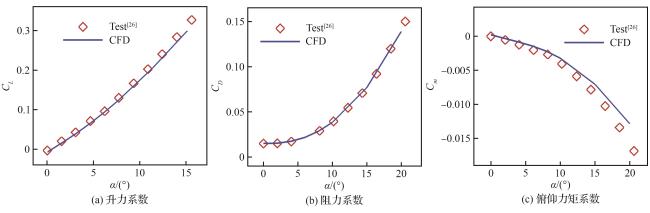
1.2.3 FDL-5升力体高超声速流动数值模拟验证
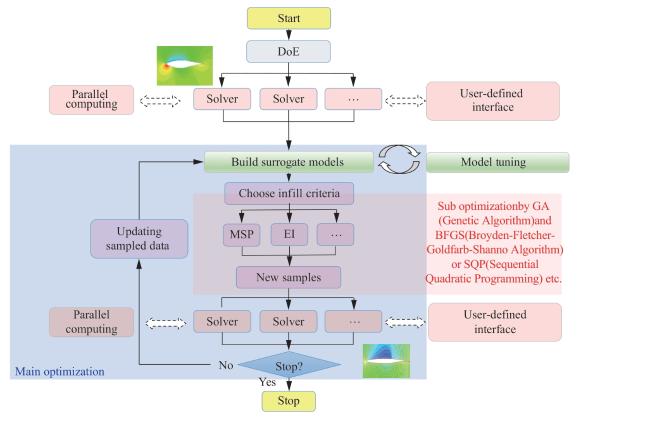
2 优化设计方法
3 空天飞机升力匹配设计需求分析
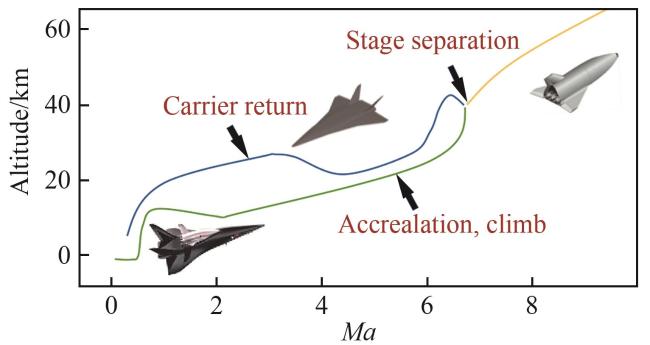
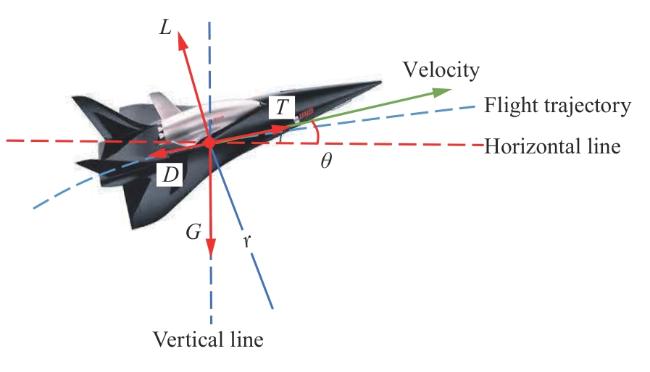
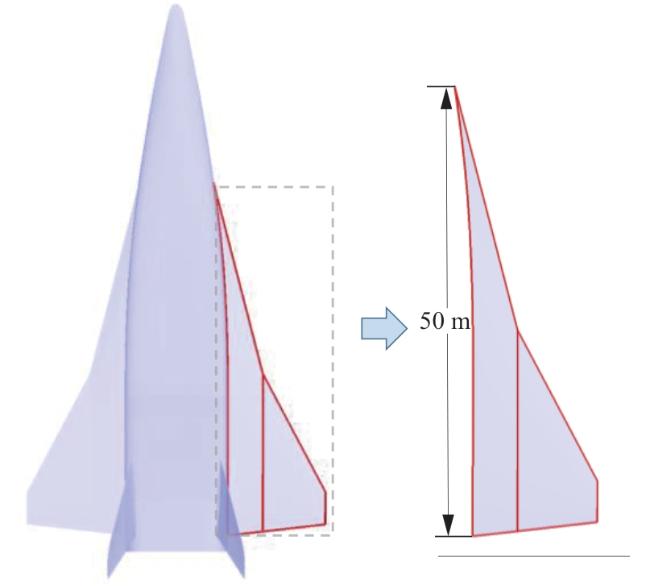
图 12 Sanger号空天飞机一级运载器的机翼几何外形Fig.12 Wing geometry layout of the first-stage carrier on Sanger aerospace aircraft |
表2 Sanger机翼平面外形参数Table 2 Planform layout parameters of Sanger wing |
| 平面外形参数 | 取值 |
|---|---|
| 内翼根弦长/m | 50 |
| 内翼前缘后掠角/(°) | 83 |
| 外翼前缘后掠角/(°) | 67 |
| 后缘前掠角/(°) | 5 |
| 内翼展长/m | 3.31 |
| 外翼展长/m | 8.09 |
表3 Sanger机翼在不同典型状态马赫数下的升力Table 3 Lift of Sanger wing at different typical Mach numbers |
| 马赫数 | 高度/km | 升力/t |
|---|---|---|
| 0.3 | 0 | 64.3 |
| 2.0 | 10 | 54.6 |
| 6.0 | 25 | 45.0 |
4 考虑升力匹配的宽速域机翼气动优化设计
4.1 平面外形气动优化设计
表5 机翼平面形状优化的数学模型Table 5 Mathematical model for wing planform shape optimization |
| 目标/约束 | 函数 | 描述 |
|---|---|---|
| Minimize | 目标:最小化超声速和高超声速状态的阻力 | |
| Subject to | 约束1:典型起飞状态升力不小于所需升力 | |
| 约束2:超声速升/重匹配 | ||
| 约束3:高超声速升/重匹配 |
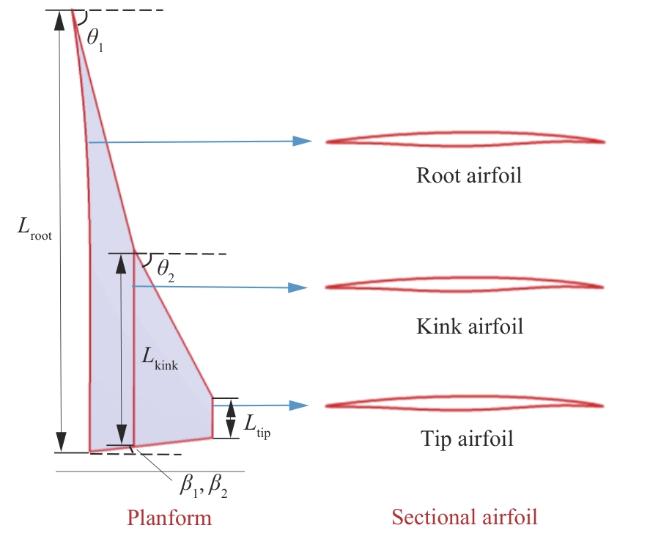
表6 双三角机翼网格无关性验证结果Table 6 Grid independence verification results of double-delta wing |
| 网格 | CL | CD | CD 相对细网格误差/% |
|---|---|---|---|
| 粗 | 0.450 0 | 0.075 40 | 0.71 |
| 中 | 0.448 4 | 0.074 99 | 0.16 |
| 细 | 0.447 9 | 0.074 87 |
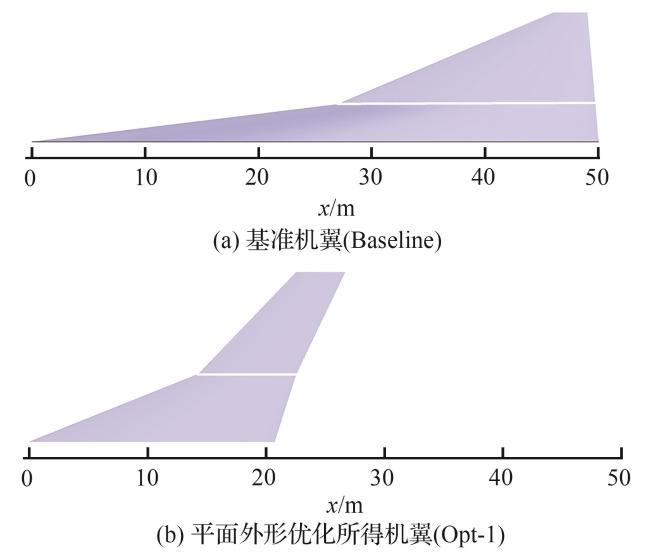
图 16 基准机翼与优化机翼的平面外形对比Fig. 16 Wing planform comparison between baseline and optimized wings |
表7 基准机翼与优化机翼Opt-1的平面外形参数对比Table 7 Comparison of planform layout parameters between baseline wing and optimized wing Opt-1 |
| 参数 | 基准机翼 | Opt-1机翼 |
|---|---|---|
| 机翼面积/m2 | 224.56 | 136.68 |
| 内翼前缘后掠角/(°) | 83.0 | 68.1 |
| 外翼前缘后掠角/(°) | 67.0 | 43.8 |
| 翼根弦长/m | 50 | 20.67 |
| Kink处弦长/m | 22.75 | 8.23 |
| 翼尖处弦长/m | 3.00 | 4.12 |
| 内翼后缘前掠角/(°) | 5 | -17.7 |
| 外翼后缘前掠角/(°) | 5 | -25.6 |
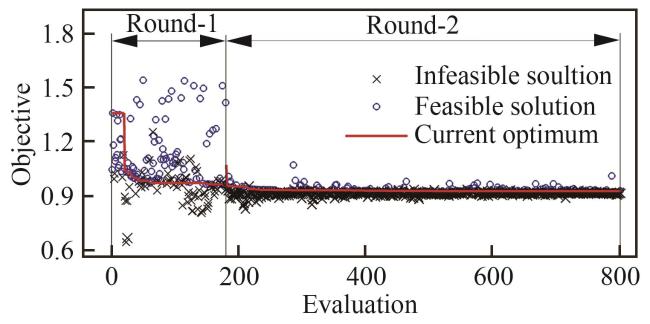
表8 基准机翼与优化机翼的宽速域气动性能对比Table 8 Wide-speed-range aerodynamic characteristics comparison of baseline and optimized wings |
| 参数 | 机翼 | Ma=0.3, H=0 km, α=10° | Ma=2.0, H=10 km | Ma=6.0, H=25 km |
|---|---|---|---|---|
| 升力/t | 基准 | 64.30 | 54.60 | 45.00 |
| Opt-1 | 64.16 | 54.60 | 45.00 | |
| 升力相对变化/% | -0.19 | 0 | 0 | |
| 阻力/t | 基准 | 10.75 | 12.27 | 6.67 |
| Opt-1 | 10.15 | 10.88 | 6.61 | |
| 阻力相对变化/% | -5.58 | -11.33 | -2.36 | |
| 升阻比 | 基准 | 5.98 | 4.45 | 6.65 |
| Opt-1 | 6.32 | 5.02 | 6.81 | |
| 升阻比相对变化/% | +5.69 | +12.81 | +2.41 | |
| 升力系数 | 基准 | 0.447 9 | 0.032 58 | 0.031 00 |
| Opt-1 | 0.736 5 | 0.053 55 | 0.050 93 | |
| 升力系数相对变化/% | +64.25 | +64.36 | +64.29 | |
| 阻力系数 | 基准 | 0.074 81 | 0.007 315 | 0.004 662 |
| Opt-1 | 0.116 5 | 0.010 68 | 0.007 479 | |
| 阻力系数相对变化/% | +55.35 | +46.00 | +60.42 |
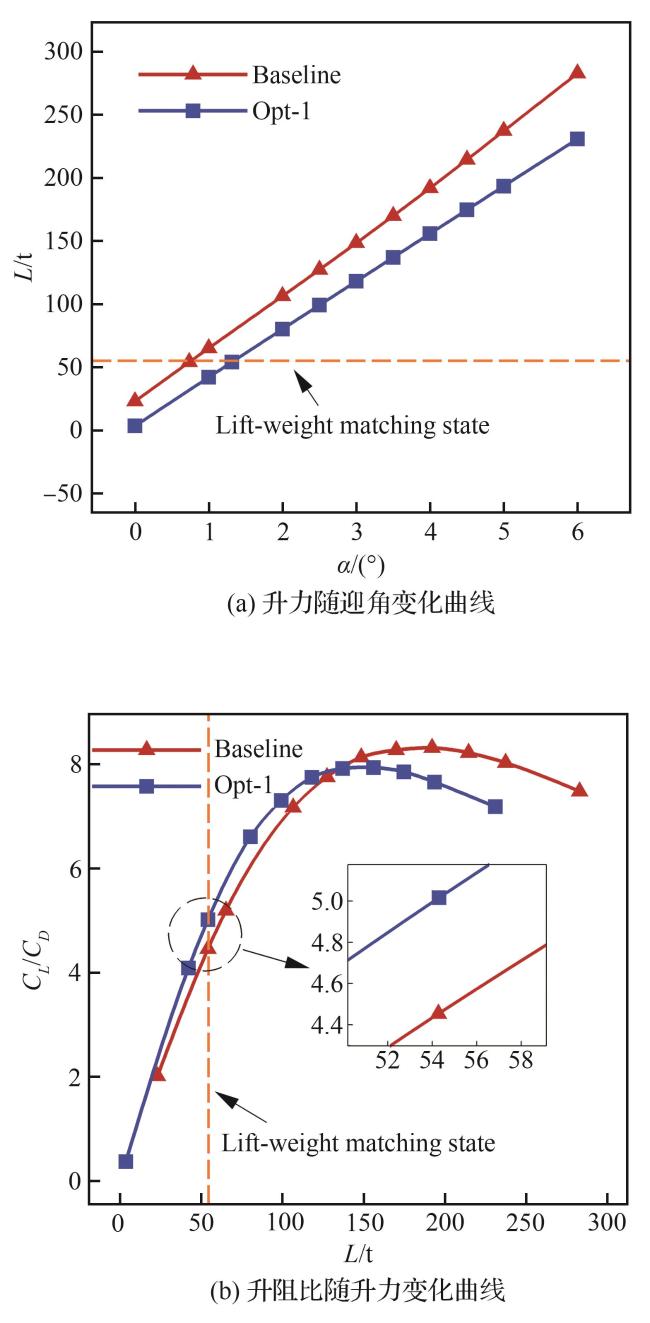
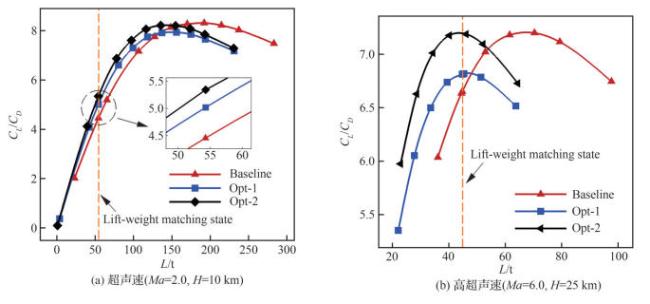
图 18 超声速状态下基准机翼与优化机翼的气动特性对比(Ma=2.0, H=10 km)Fig.18 Aerodynamic characteristics comparison between baseline and optimized wings in supersonic state (Ma=2.0, H=10 km) |
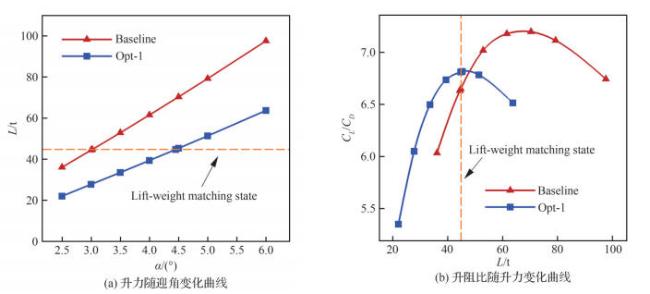
图 19 高超声速状态下基准机翼与优化机翼的气动特性对比(Ma=6.0, H=25 km)Fig.19 Aerodynamic characteristics comparison between baseline and optimized wings in hypersonic state (Ma=6.0, H=25 km) |
4.2 机翼剖面外形气动优化设计
表9 机翼剖面形状优化设计的数学模型Table 9 Mathematical model for wing profile design optimization |
| 目标/约束 | 函数 | 描述 |
|---|---|---|
| Minimize | 目标:最小化超声速和高超声速状态的阻力 | |
| Subject to | 约束1:典型起飞状态升力不小于所需升力 | |
| 约束2:超声速升/重匹配 | ||
| 约束3:高超声速升/重匹配 | ||
| 面积约束4~6:各剖面的面积减小不超过10% | ||
| 厚度约束7~9:各剖面厚度不减小 | ||
| 前缘半径约束10~12:各剖面前缘半径不减小 |

表10 基准机翼和优化机翼的宽速域气动性能对比Table 10 Comparison of wide-speed-range aerodynamic characteristics between baseline and optimized wings |
| 参数 | 机翼 | Ma=0.3, H=0 km, α=10° | Ma = 2.0, H = 10 km | Ma = 6.0, H = 25 km |
|---|---|---|---|---|
| 升力/t | 基准 | 64.30 | 54.60 | 45.00 |
| Opt-1 | 64.16 | 54.60 | 45.00 | |
| Opt-2 | 64.20 | 54.60 | 45.00 | |
| Opt-2升力相对基准变化/% | -0.16 | 0 | 0 | |
| 升阻比 | 基准 | 5.98 | 4.45 | 6.65 |
| Opt-1 | 6.32 | 5.02 | 6.81 | |
| Opt-2 | 6.15 | 5.34 | 7.19 | |
| Opt-2升阻比相对基准变化/% | +2.84 | +20.00 | +8.12 |
5 考虑机体干扰的宽速域机翼气动优化设计
5.1 基准构型及其宽速域气动特性评估
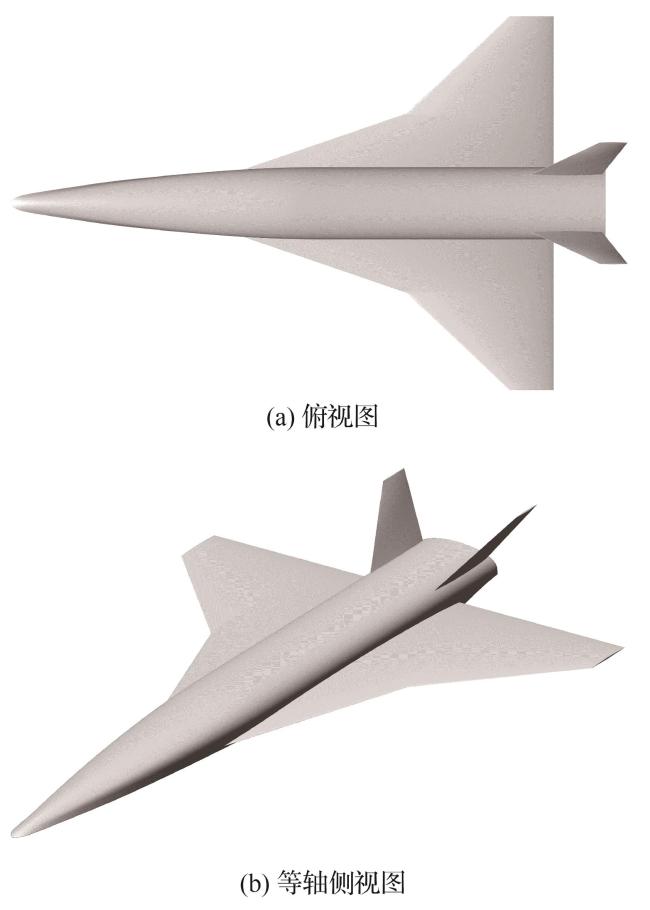
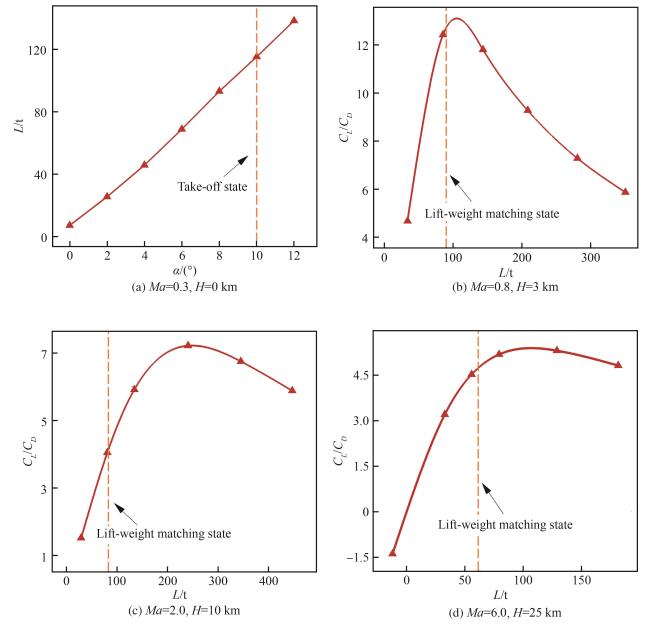
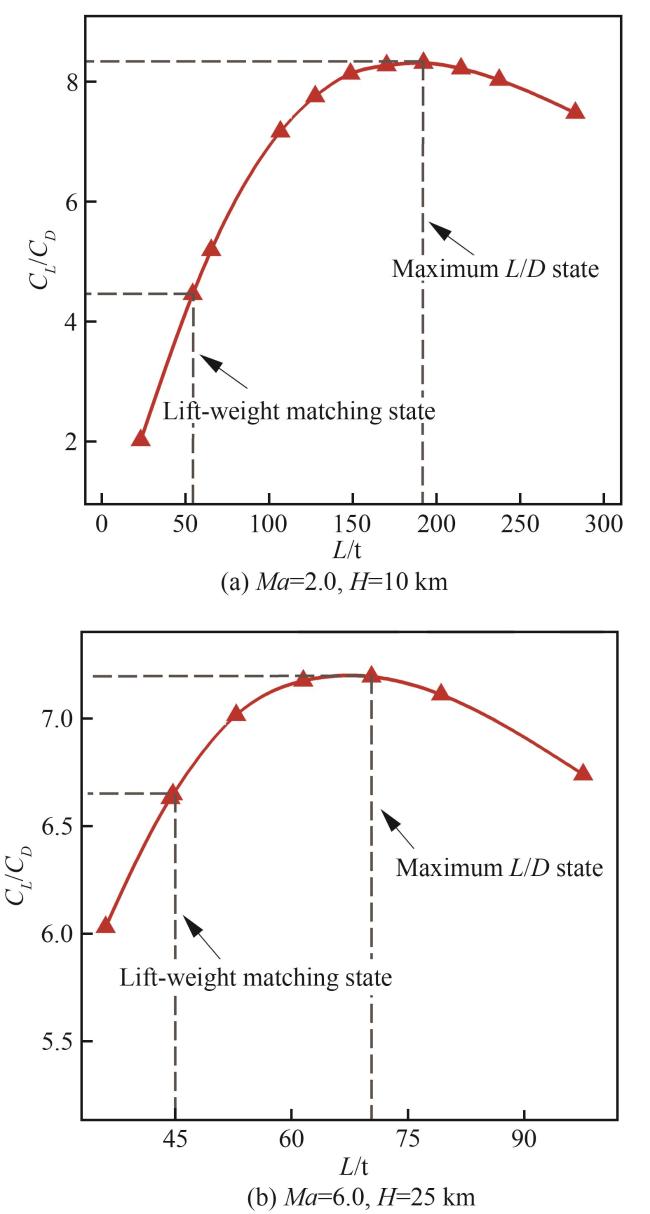
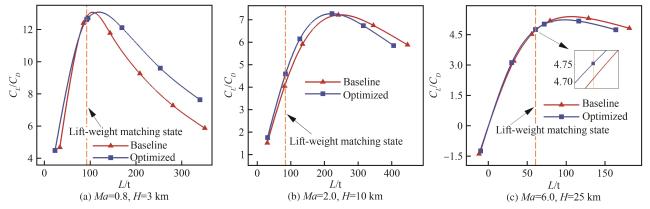
图 25 不同设计工况下的气动特性曲线Fig.25 Aerodynamic characteristic curves under different design conditions |
表12 全机构型宽速域气动特性Table 12 Wide-speed-range aerodynamic characteristics of full-scale vehicle configuration |
| 马赫数 | 最大升阻比状态 | 升/重平衡状态 | ||
|---|---|---|---|---|
| 升力/t | 升阻比 | 升力/t | 升阻比 | |
| 0.8 | 104.0 | 13.09 | 97 | 12.71 |
| 2.0 | 239.5 | 7.21 | 85 | 4.16 |
| 6.0 | 100.8 | 5.39 | 62 | 4.72 |
5.2 机体干扰下的机翼平面外形气动优化设计
表13 全机构型下机翼平面设计优化的数学模型Table 13 Mathematical model for wing planform design optimization of full-scale vehicle configuration |
| 目标/约束 | 函数 | 描述 |
|---|---|---|
| Minimize | 目标:最小化超/高超声速状态的阻力 | |
| Subject to | 约束1:典型起飞状态升力不小于所需升力 | |
| 约束2:跨声速升/重匹配 | ||
| 约束3:超声速升/重匹配 | ||
| 约束4:高超声速升/重匹配 | ||
| 约束5:高超声速升阻比不小于基准 | ||
| 约束6:跨声速升阻比不小于基准的95% |
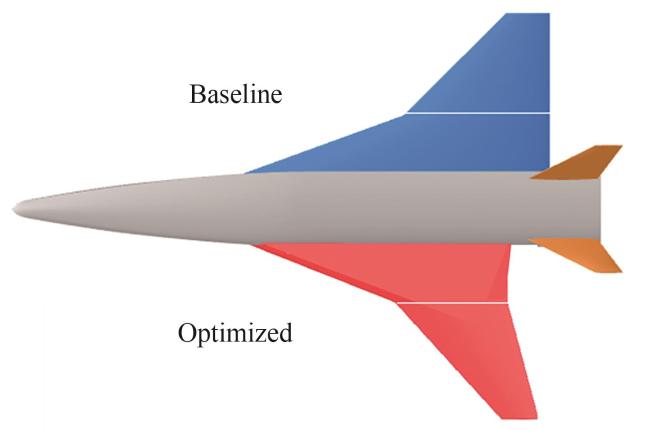
图 26 基准构型与优化构型的机翼平面外形对比Fig.26 Comparison of wing planform layout between baseline and optimized configurations |
表14 基准构型与优化构型的机翼参数对比Table 14 Comparison of wing parameters between baseline and optimized configurations |
| 参数 | 基准构型 | 优化构型 |
|---|---|---|
| 内翼前缘后掠角/(°) | 70.0 | 68.1 |
| 外翼前缘后掠角/(°) | 45.0 | 43.8 |
| 翼根弦长/m | 18.31 | 15.87 |
| Kink处弦长/m | 8.15 | 6.87 |
| 翼尖处弦长/m | 5.50 | 5.29 |
| 内翼后缘前掠角/(°) | 0 | 1.15 |
| 外翼后缘前掠角/(°) | 0 | -17.31 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
表15 基准构型和优化构型的宽速域气动性能对比Table 15 Comparison of wide-speed-range aerodynamic characteristics between baseline and optimized configurations |
| 参数 | 构型 | Ma=0.3, H=0 km, α=10° | Ma=0.8, H=3 km | Ma=2.0, H=10 km | Ma=6.0, H=25 km |
|---|---|---|---|---|---|
| 升力/t | 基准 | 115.6 | 97 | 85 | 62 |
| 优化 | 100.5 | 97 | 85 | 62 | |
| 升力相对变化/% | 满足起飞要求 | 0 | 0 | 0 | |
| 升阻比 | 基准 | 5.88 | 12.71 | 4.16 | 4.72 |
| 优化 | 5.81 | 12.55 | 4.55 | 4.75 | |
| 升阻比相对变化/% | -1.19 | -1.26 | +9.38 | +0.64 |