
随着低空多旋翼飞行器在物流运输、环境监测、应急救援等领域的广泛应用,其在复杂环境下的安全着陆问题逐渐成为研究热点。其中,多旋翼无人机因具备机动性好、隐蔽性强、起降灵活以及环境适应能力强等优势,在低空飞行领域得到广泛运用[1-2]。目前,传统的多旋翼飞行器通常采用滑橇或撑杆等固定式起落架,这类起落架虽然结构简单、重量轻,但对着陆环境的要求较为苛刻,通常情况下需要平坦且稳定的起降平台。在崎岖地形、斜坡和非均质地面等复杂环境下,传统起落架难以有效适应地形变化,可能导致机身姿态不稳定,冲击缓冲能力不足,甚至在极端着陆条件下发生侧翻或结构破坏等严重事故[3]。因此,提升低空多旋翼飞行器在复杂环境中的着陆适应性与缓冲能力,是提高其任务执行能力和安全性的关键挑战之一。
针对这一问题,研究人员提出了一些新型的自适应起落架构型,以提高飞行器的环境适应能力。借鉴自然界四足或多足动物的运动方式,自适应起落架采用多自由度可调结构,以适应不同复杂环境。Manivannan等[4]设计了一种具有两自由度的机器人腿式起落架,能够适应斜坡地形,并通过落震仿真和坡度极限分析验证了所设计起落架的适应性,为自适应起落架在复杂地形下的应用提供理论支持。任佳等[5]基于多连杆机构设计了一种自适应起落架,并通过控制算法和动力学建模仿真进行了相关研究,运用MATLAB和ADAMS进行联合仿真,验证了该起降系统在复杂地形上的可行性。Tian等[6]针对无人直升机提出了一种线缆驱动的腿式起落架,并结合机身控制和接触力优化设计了一套控制系统,以减少各着陆腿的冲击载荷。Tang等[7]设计了一种具有三条运动支链的起落架机构,并构建了一种有效的虚拟等效并联机构模型,用于研究机构与地形之间的相互作用及稳定性。Paul等[8-9]对一种配备三机械臂系统的飞行器进行了研究,该系统可以使飞行器在非结构化地形上安全着陆。Liu等[10]基于鹰爪的特性设计了一种仿生多指地形自适应无人机,并通过实验验证了其在斜坡、台阶和非结构化地形上的稳定着陆能力。然而,随着研究的深入以及低空环境的日益复杂,仅在机械结构上优化起落架已不足以全面满足飞行器的安全着陆需求。
在具备复杂地形适应能力的基础上,如何实现安全稳定的着陆已成为当前研究的关键问题之一。Ni等[11]基于六旋翼四足飞行器,利用零力矩点稳定距离和旋翼-地面间隙作为着陆安全判据,探索飞行器稳定着陆的地形限制边界及地形-速度限制边界。孙筵龙等[12]针对轮腿式火星探测机器人,通过腿部阻抗控制算法和基于腿部运动危险系数的重心高度调整算法,提升了机器人在复杂地形中的自适应能力、运动稳定性及腿部空间安全性。在飞行器的着陆过程中,飞行器起落架与起降基础的相互作用构成了一个复杂的系统,其着陆特性受结构和外部因素的影响[13]。为探究自适应起落架的着陆冲击性能,Boix等[14]结合拉格朗日和牛顿-欧拉方法对系统动力学进行了建模,包括其运动和关节扭矩,并引入接触模型模拟地面相互作用力,通过水平控制器保持飞行器姿态。Dong等[15]分析了地形不确定性对飞行器着陆的影响,并建立了一个考虑塑性变形及非线性接触力的着陆动力学模型,随后通过实验验证了其有效性。Yue等[16]提出了一种新型准三维动态着陆模型,以解决可重复使用运载火箭在对称着陆模式下的着陆冲击问题。
上述研究在自适应起落架的构型设计、着陆稳定性和着陆冲击方面取得了重要进展,相较于传统起落架,其环境适应性得到了显著提升。然而,在复杂地形环境下,着陆缓冲性能同样至关重要,着陆时过大的冲击或弹跳可能导致着陆失败、机体损坏,甚至引发灾难性事故。为此,研究人员开始关注飞行器起落架的缓冲性能优化。丁梦龙等[17]对电动垂直起降飞行器的起落架与吸能元件进行了适坠性优化设计,提高了飞行器在坠撞情况下的整体安全性,并探讨了离轴坠撞参数对乘员的影响。Kiefer等[18]通过多体动力学仿真工具建立了起落架与地面之间的柔性接触模型,以讨论腿式起落架在硬着陆过程中的缓冲效果。康在飞等[19]根据磁流变效应设计了一种半主动式磁流变缓冲器,以有效降低飞行器着陆冲击载荷。Chen等[20]设计了一种仿生机器人,并研究了腿部姿态对着陆缓冲性能及稳定性的影响,提出了一种腿部姿态确定方法,以实现各种着陆条件下的高运动性能。在自适应起落架研究方面,任佳等[21]基于直升机设计了一种六腿起落架结构,并提出适用于复杂地形的着陆设计方法,对着陆性能与控制策略进行了深入研究。高峰等[22]针对腿式月面低空探测飞跃器,采用了并联腿式机构,使其具备在多种复杂地形上主动缓冲着陆和行走适应能力。
综上所述,针对低空多旋翼飞行器在复杂环境中的着陆问题,研究者们已在自适应起落架的结构设计、地形适应性、着陆稳定性及地面动力学等方面取得了重要进展。通过引入仿生设计、多自由度机构以及先进的着陆控制策略,部分飞行器已能够适应非结构化地形并实现较为平稳的着陆。然而,目前针对复杂环境下的起降系统,其缓冲机制仍主要依赖被动缓冲元件或半主动控制方式,结构与控制策略缺乏协同设计,难以在复杂地形与多变着陆条件下实现最优缓冲效果,导致飞行器在着陆过程中仍可能面临较大的冲击载荷和姿态不稳定问题。
本文从仿生结构与控制策略两个维度开展研究,设计了一种驱动缓冲一体化仿生腿式起落架,并建立着陆单腿运动学、动力学以及整机着陆动力学模型,分析着陆过程中关节驱动力矩与地面冲击力的相互作用。在此基础上,基于阻抗控制原理提出了一种用于着陆缓冲的主动柔顺控制策略。该策略无需依赖传统的弹簧、阻尼器等被动柔顺机构,而是通过传感器获取关节运动信息,结合控制算法实现关节力矩的主动调节,使起落架具备可调柔顺性与缓冲能力。随后,通过单腿与整机的多工况仿真分析,深入探讨了该策略对缓冲性能的提升、阻抗参数对缓冲性能的影响,以及仿生腿式起落架对侧向冲击能量的吸收能力。
1 仿生起落架构型设计与分析
仿生腿式起落架是一种常用的具备自适应能力的着陆结构,其借鉴仿生原理,通过主动调整姿态,使无人机能够在复杂地形上实现稳定着陆。研究表明[23],增加着陆腿的数量有助于提升着陆稳定性,但同时会导致结构复杂性增加,并对系统重量和成本产生影响。因此,在平衡着陆性能与结构复杂性的基础上,采用四支腿的起落架方案能够在稳定性、重量及成本等方面达到较优的折中。
1.1 单腿结构设计
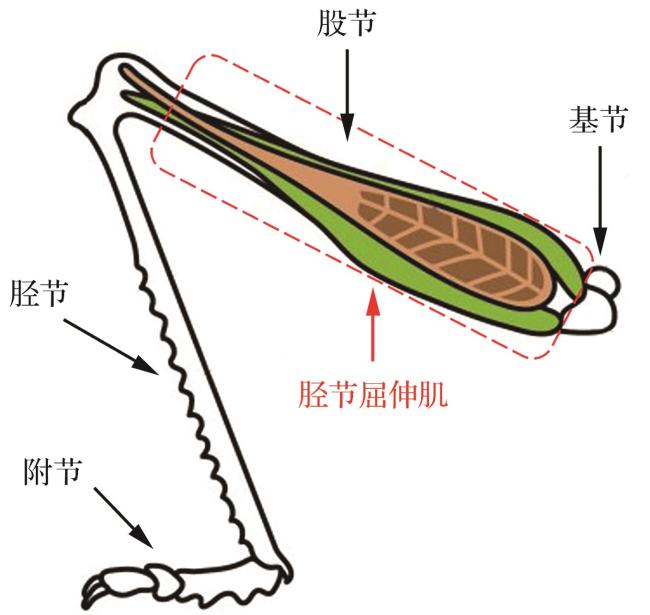
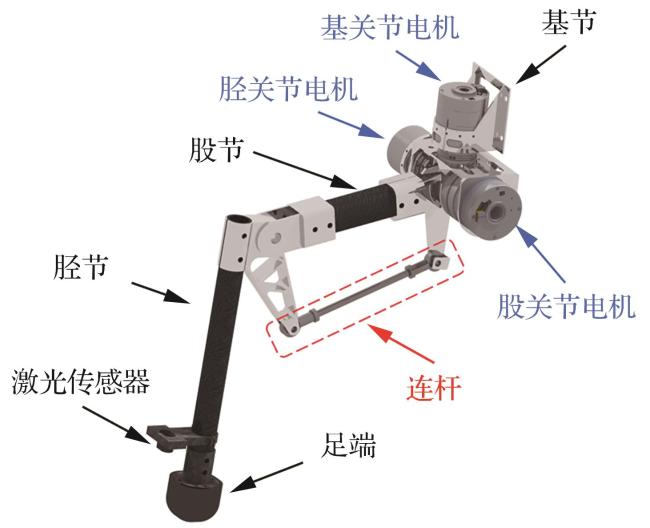
基于以上仿生设计,起落架基节用于连接飞行器机身,承担主要的结构支撑作用,其上布置有3个关节电机,分别为基关节电机、股关节电机以及胫关节电机,用以驱动着陆腿在空间里的三自由度运动。此外,为进一步提升结构的轻量化,起落架在材料选择和布局设计上进行了优化。股节与胫节采用高强度轻质材料,以减少整体重量,同时保证刚度和耐久性。3个关节电机集中布置在着陆腿根部,重量集中且更靠近机身重心,以此减小着陆腿的运动惯量,减小了着陆腿在运动时对机体稳定性的影响。足端部分采用高摩擦柔性材料,能够减小着陆瞬间的冲击及增大与地面的摩擦力,提高着陆过程中的安全性。
1.2 运动学分析
腿式起落架单腿运动学是多腿运动学的基础,由于每条着陆腿构型相同,完成单腿运动学分析即可实现整个腿式起落架的运动学建模。基于1.1节设计的腿式起落架构型,建立腿部各关节和足端点位置的关系,可分为正运动学和逆运动学。
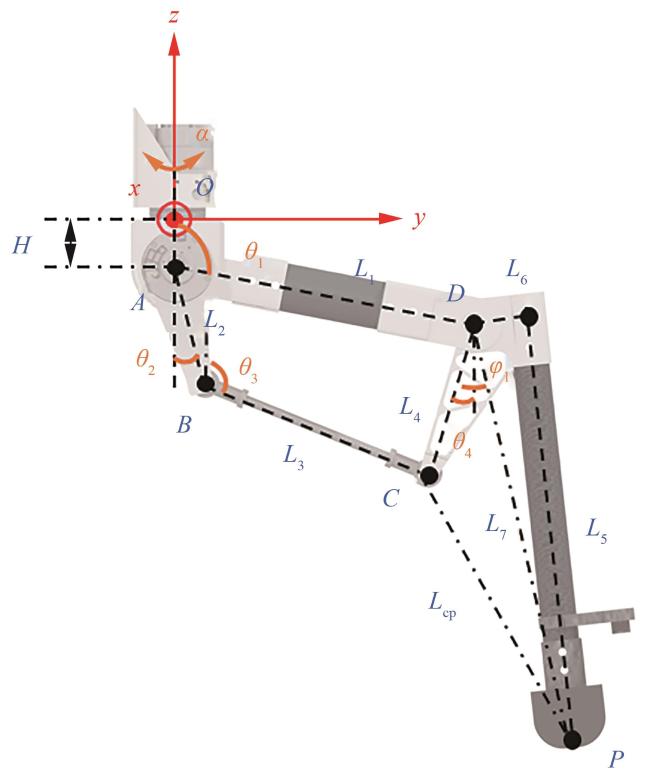
对点D位置建立封闭矢量方程:
式中: 、 、 、 分别为股节AD、摇臂AB、连杆BC、摇杆CD的结构尺寸; 、 、 、 分别对应以上各结构与竖直方向的夹角。
将式(1) 转换为三角函数表示的标量形式:
对点P位置建立封闭矢量方程:
式中: 为P点相对于坐标原点O的矢量表达形式;H为OA结构尺寸,即股、胫关节电机转轴到xOy平面的距离; 为DP结构尺寸; 为DP与CD的夹角。
将式(3) 转换为三角函数表示的标量形式:
式中: 为点P在yOz平面上的位置坐标。
式中: 为足端P在空间坐标系Oxyz下的位置坐标; 为基关节转角。
由式(1)~式(5) 可求解得到足端位置与各关节转角之间的映射关系,即为正运动学;反之,可同理求解逆运动学。
进一步的,将式(2) 、式(4) 和式(5) 联立后两端同时对时间求导并整理成矩阵形式:
式中:J为关节空间向足端操作空间映射的雅可比矩阵。通常情况下, ,即J是满秩的,说明足端在3个方向上都是可控的。
根据以上足端位置与关节转角的运动学关系,采用蒙特卡洛法可计算足端在Oxyz坐标下的理论运动空间,如图4所示。此处考虑结构限制,取各关节角度作动范围为
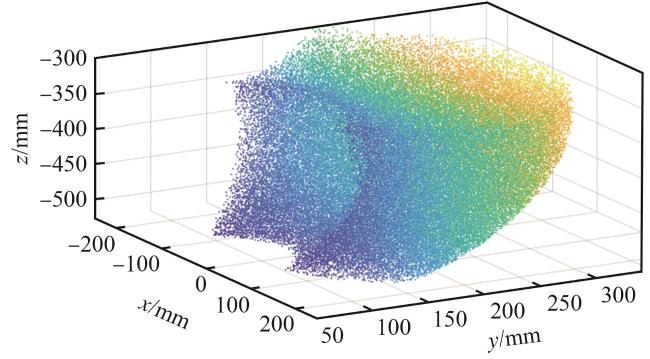
在地形适应性分析中,主要关注足端在z方向的运动范围,而x与y方向的运动范围主要影响飞行器的地面行走能力,不作为研究重点。由图4可知,足端的垂向运动范围为0~210 mm。整机采用四腿式起落架布局,四个着陆支腿结构完全相同且相对于飞行器重心位置呈中心对称分布。相邻的足端水平间距为725 mm,结合足端的垂向运动范围计算可得,该起落架能够适应0°~16°坡度的地形。这一结果表明,所设计的仿生腿式起落架在一定范围内具备较强的地形适应能力。
2 动力学建模与分析
2.1 起落架动力学分析
由1.2节建立的正逆运动学模型,可以得到足端点笛卡尔空间到关节空间的相互映射,而驱动腿部以期望加速度和速度运动,需建立腿部动力学模型来计算所需的驱动力和力矩,以实现期望的运动[25]。
对足端位置方程求一阶导和二阶导可得到速度与加速度方程:
式中: 为角速度矩阵, 为角加速度矩阵。
各杆件动能T包括平动动能和转动动能:
展开后:
式中: (i=1,2,…,n)为各杆件质量; 为各杆件质心位置坐标;Jx 、Jy 、Jz 为广义坐标与质心速度之间的雅可比系数; 为各杆件转动惯量; 为各杆件旋转角速度。
整体势能为
式中:g为重力加速度; 为各杆件重心高度。
系统受到的广义力 主要包括电机驱动力矩 和足端接触力 在空间坐标上的映射,综合考虑得:
将式(10)~式(12) 代入拉格朗日方程:
式中: 为拉格朗日函数。
代入后整理可得系统的动力学方程:
式中: 为惯性矩阵,反映系统对各广义加速度的“质量惯性”响应,包含各连杆质量分布对系统运动惯性的影响; 为科氏力矩阵,描述由于广义速度耦合而引起的离心力与科氏力效应; 为重力矩阵,表示系统由于重力作用在各广义坐标方向上所产生的等效力矩。
2.2 着陆动力学分析
为了获得无人机在着陆过程中的动态响应,并更直观地观测机体运动,需建立整机着陆动力学模型,如图5所示,包含旋翼升力、旋翼反扭矩及地面接触力。
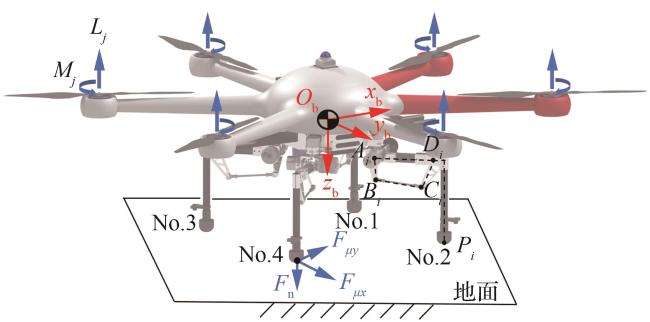
旋翼转动所产生的升力与反扭矩为
式中:Lj (j=1,2,…,6)为旋翼升力;CL 为升力系数;wj 为旋翼转速;Mj 为旋翼反扭矩;C M为反扭矩系数。
除飞行器外,还需描述足端与地面之间的接触关系。因此,在足端与地面之间基于法向力和切向力方程构建空间接触力模型,其中法向接触力使用等效连续接触方程[26]来描述法向接触过程及能量耗散:
式中: 为法向力;n为能量指数;K n为接触刚度系数;D n为接触阻尼系数; 、 为相对变形量及相对接触速度。
切向摩擦力采用Stribeck方程[27],基于相对运动速度来确定非线性摩擦力:
式中:v为相对运动速度;k 1为线性速度衰减系数;k 2为非线性速度衰减系数;k 1、k 2与静摩擦系数 有关。
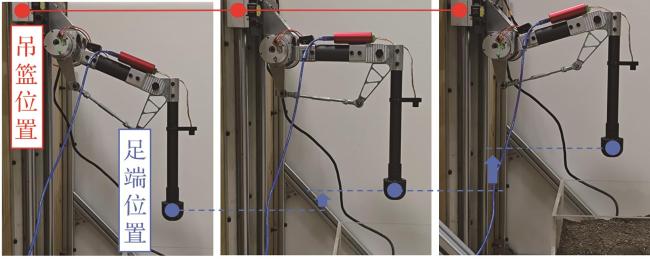
2.3 样机与系统搭建
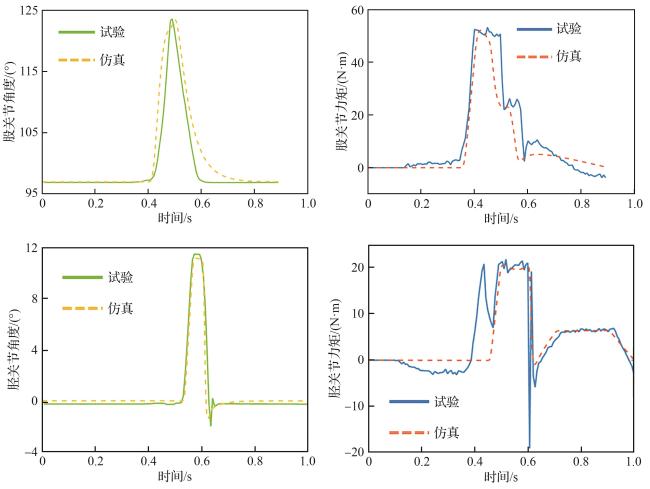
由图7对比结果可见,当足端受到接触外力时,股关节在约0.38 s开始产生力矩,并在0.45 s左右达到峰值,而关节角度的变化滞后于力矩响应,在0.4 s左右开始发生变化,并于0.5 s左右达到峰值。类似地,胫关节在0.48 s产生力矩并迅速达到峰值,而关节角度第0.5 s左右开始变化并达到峰值。上述现象表明,由于着陆腿存在运动惯量,当运动状态发生改变时,关节位置的变化相较于力矩响应存在一定的滞后性。实验数据与仿真结果在力矩及关节角度的变化趋势上保持一致,所建动力学模型能够准确描述系统动力学特性。
综合来看,试验数据与仿真数据较为吻合,表明所设计的仿生腿式起落架结构合理,运动学与动力学分析准确。所测量参数的微小差异主要来源于部件间的摩擦、传感器误差等非理想因素,均在可接受范围内。
3 主动柔顺控制缓冲方法
设计的仿生腿式起落架采用了驱动-缓冲一体化架构,摒弃了传统的弹性或阻尼缓冲元件,依靠传感器获取各关节运动特性,结合实时计算和主动调整关节力矩,实现刚度与阻尼特性的可调节性。通过轻量化设计与主动柔顺控制策略的融合,使飞行器在着陆过程中具备更强的环境适应性,有效降低冲击力,提高交互安全性与着陆稳定性。
3.1 基于力的阻抗控制
阻抗控制是一种典型的主动柔顺控制方法,该方法通过对力或位置进行协调控制,使系统表现出期望的刚度、阻尼和惯性特性,从而使飞行器在着陆过程中具备柔顺适应能力。
基于力的阻抗控制中,以力闭环为内环,阻抗控制环为外环来设计阻抗控制系统,此时阻抗控制器可根据足端的位置误差来计算阻抗力。阻抗力与位置的关系可以用惯性、刚度、阻尼3个参数来定义,可通过3个参数来设计阻抗控制模型[28]。
设计着陆腿着陆时足端的阻抗控制率为
式中: 为阻抗力矩阵; 为惯性矩阵; 为阻尼矩阵; 为刚度矩阵; 为足端期望位置; 为足端实际位置;q为足端位置误差。
将足端阻抗力映射到关节空间,得到关节对应的驱动力矩:
将式(20) 代入式(19) 中可得:
结合式(15) 可将式(21) 改写为
由式(22) 可知,足端力与关节输入力矩和系统动力学力矩有关,为了实现期望的阻抗特性,还需对着陆腿的输入力矩进行逆动力学补偿,设补偿力矩为
式中: 为逆动力学补偿模型参数。
由此,输入力矩可表示为
将式(24) 代入式(22) 中可得:
当动力学模型参数没有误差时:
将式(26) 与式(19) 对比可知,此时的足端接触力可以跟随足端阻抗力,能够实现足端阻抗跟踪,对式(26) 进行拉氏变换,足端阻抗可以表示为
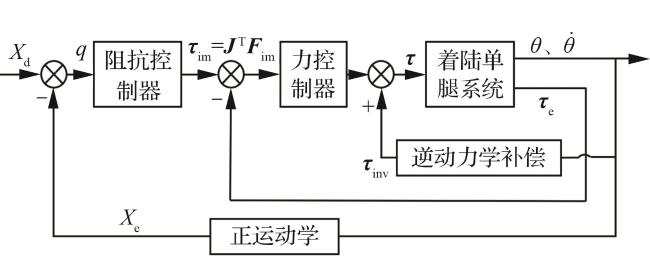
阻抗控制系统框图如图8所示。基于力的阻抗控制模型可以通过对关节输出力矩的控制实现足端接触力对阻抗力的跟踪,使足端表现出阻抗特性。以力矩控制环作为内环可以提高整个控制系统的响应速度,理论上具有很好的控制效果。
3.2 单腿着陆缓冲仿真分析
为验证上述控制系统对起落架在着陆时的缓冲性能,利用MATLAB建立着陆单腿多体动力学模型,分析着陆过程中机体过载以及各关节驱动力矩。
设置着陆腿触地速度为2 m/s,在足端与地面之间建立接触如式(17) 及式(18) 所示的接触模型,设置接触刚度K n=3 000 N/m、接触阻尼D n=300 N/(m∙s-1)、动摩擦系数 =0.5、静摩擦系数 =0.7,定义过载系数为机体所受加速度与重力加速度的比值。
在Simulink中搭建控制器,x、y、z方向的运动分别取阻抗控制参数 、 、 ,对单腿着陆进行柔顺控制。
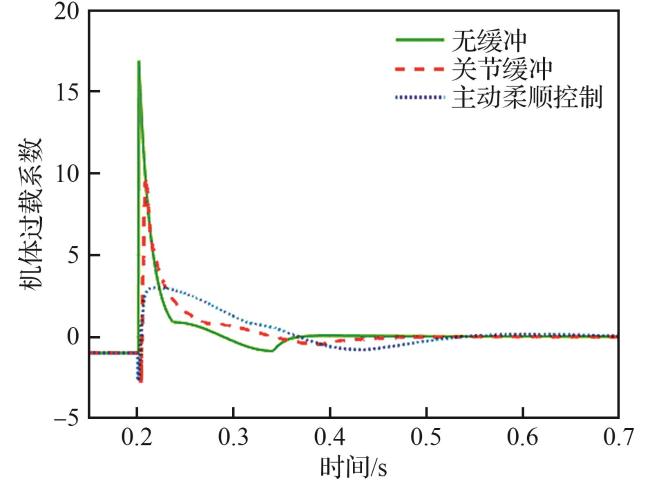
对于单腿着陆仿真,采用无缓冲、关节缓冲以及所提出的主动柔顺控制进行对比分析。无缓冲即各关节锁死,不进行任何作动;关节缓冲为利用驱动电机的三环串级PID控制,通过编码器差值进行自动调整。
机体过载系数曲线如图9所示,过载曲线能够反应系统对外部冲击的吸收和分配情况,是评估缓冲性能的重要工具。在无缓冲的情况下,机体直接受到冲击,过载瞬间上升至最大值,峰值载荷达到17g,且载荷变化剧烈,表现出明显的刚性碰撞特征,这可能导致机载设备或机体结构损伤;关节缓冲的峰值载荷为10g,可见关节电机的控制算法有一定缓冲效果,冲击得到了部分吸收;对于提出的主动柔顺控制,峰值载荷为3g,相比无缓冲降低了82.4%,比关节缓冲降低了70%,且整个着陆过程中载荷变化较为平缓,冲击持续时间较长,没有过大的载荷突变,系统相应平稳。
为探究着陆冲击对关节电机的影响,现对着陆腿关节力矩进行分析,图10为着陆腿股、胫关节力矩曲线图。因基电机作动面与着陆冲击受力面相互垂直,着陆冲击对其力矩影响较小,故不对其进行分析。
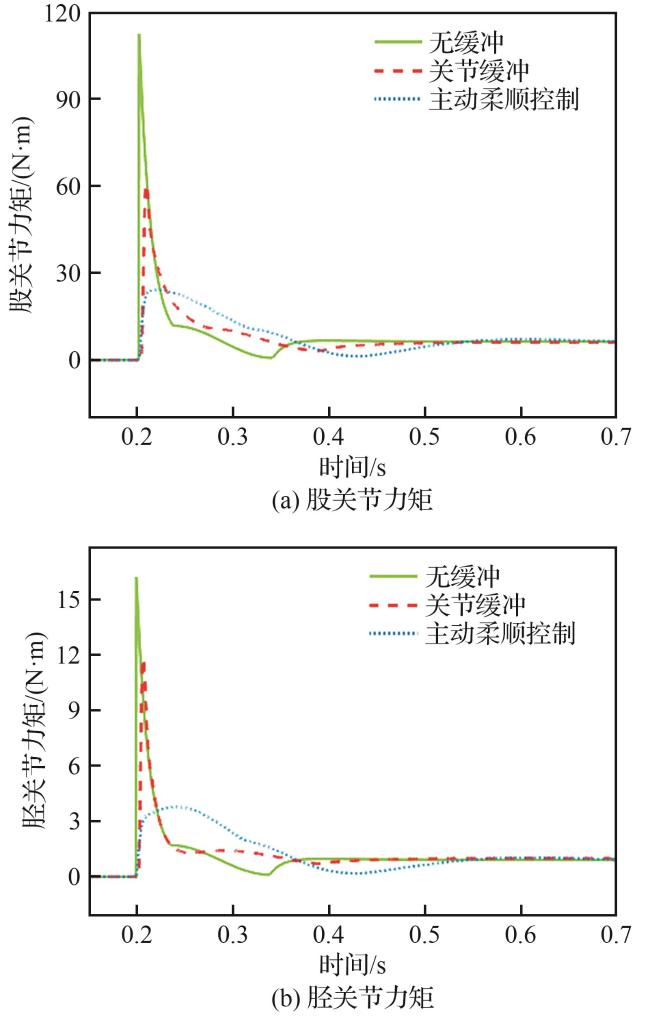
股关节电机直接驱动股节运动,在飞行器着陆时承受主要冲击,从股关节力矩曲线中可见:若飞行器进行无缓冲硬着陆时,关节扭矩峰值达112.5 N∙m,远远超出构型设计所选型电机的启停峰值扭矩,将导致电机的损坏;采用关节缓冲时,扭矩峰值为58.4 N∙m,力矩冲击明显减小;而使用主动柔顺控制的扭矩峰值为24.2 N∙m,进一步优化了力矩响应,相对无缓冲减少了78.5%,比关节缓冲减少了58.6%,力矩变化过程更加平稳。胫关节在着陆过程中承受了部分冲击,无缓冲着陆关节扭矩峰值为16.3 N∙m,关节缓冲峰值扭矩为11.8 N∙m,主动柔顺控制峰值扭矩为3.8 N∙m,与前两者对比分别减少76.7%、67.8%。
综合分析,飞行器在无缓冲着陆时,机体结构受刚性冲击,过载及关节力矩峰值过大,且产生剧烈的突变,易对结构造成损伤;利用关节电机缓冲着陆,虽然在一定程度上减小了机体和关节的冲击,但仍存在较大的波动;相比前两者,主动柔顺控制表现出较好的缓冲性能,显著降低了着陆瞬间的峰值载荷与关节力矩,触地后力矩与过载变化平稳,避免了剧烈的冲击波动,使系统在保持足够支持力的同时,有效吸收了冲击能量。
对于利用主动柔顺控制的缓冲,阻抗参数的选择对缓冲性能的影响是及其重要的,除了要降低机体过载,还需考虑着陆后机身相对地面的距离。若机身位置过高,着陆稳定性将变差;机身位置过低将增大机身下挂机载设备的触地风险。因此,合理的调整参数,将起落架与地面交互的阻抗关系控制在合理的范围内,是使起落架具备良好缓冲型性能的必要条件。
为此,针对阻抗参数对缓冲性能的影响展开进一步研究。由于阻抗模型在空间各个方向是解耦的,因此可以只考虑着陆腿作动空间某一维的情况,对于单腿着陆缓冲,只需考虑z方向即可。
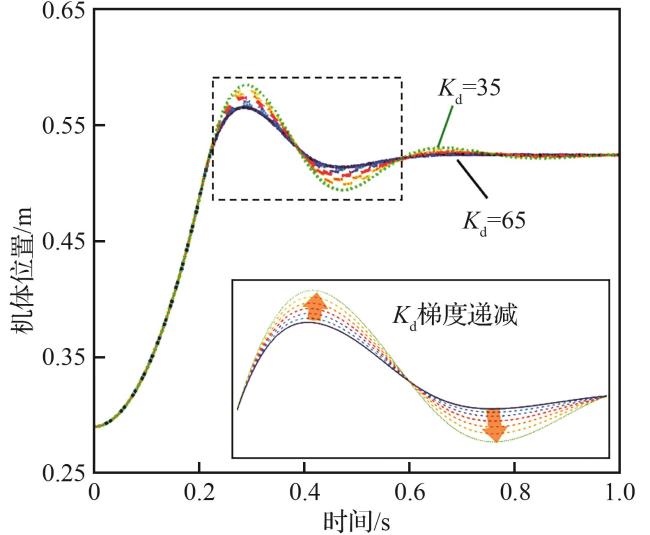
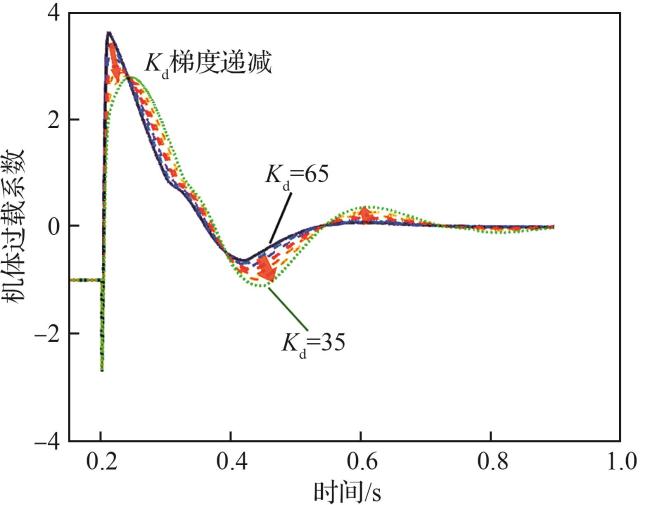
当飞行器采用主动柔顺控制作为缓冲策略时,不同阻抗参数对起落架表现出的缓冲特性也不同。在保证飞行器机身与着陆腿足端具有精确的相对位置控制的基础上,使着陆腿具有一定的缓冲性能,必须合理地调整阻抗参数。基于以上研究对阻抗参数的基本调整原则进行总结:
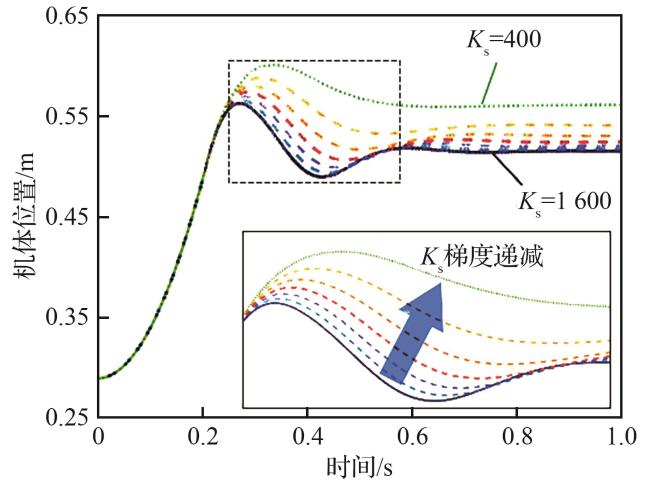
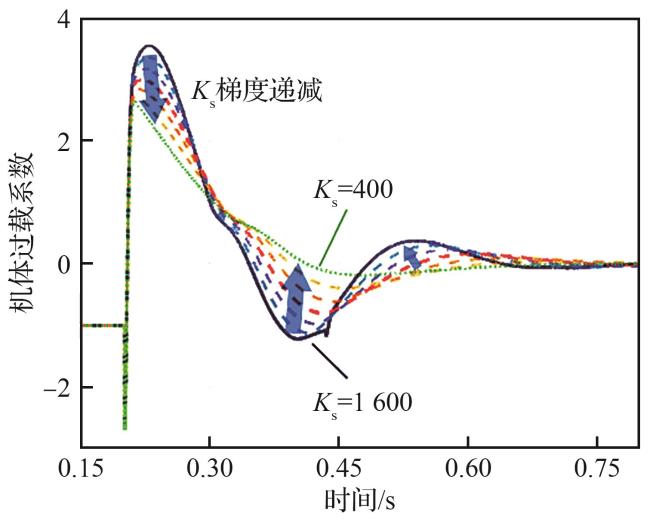
刚度系数K s是反映着陆腿刚度变化的量,它的大小直接反应着陆腿与地面接触时是呈现刚性还是柔性,减小K s能减小机体过载,但会增大位置误差。一般来说,刚度系数的调整要尽量使系统处于临界阻尼状态或过阻尼状态。
对于阻尼系数K d,它的变化不会影响机身位置的稳态值,但会改变着陆腿与地面的接触过程。一般来说,增大K d,振荡减弱,超调量减小,但过大的阻尼系数会使位置响应达到稳态的时间较长,需要根据需求合理选取。
3.3 整机着陆缓冲仿真分析
着陆单腿的仿真验证了主动柔顺控制在缓冲性能方面的优势,证明了其能够有效降低飞行器着陆冲击,减小关节驱动电机载荷。然而,旋翼飞行器的着陆是一个整体协同过程,涉及多条着陆腿的联合作用,因此,仅基于单腿分析难以全面评估整机的缓冲性能。
在单腿缓冲分析的基础上,进一步研究整机的着陆缓冲特性。考虑到多足式自适应起落架在复杂环境下的着陆,将基于整机模型建立复杂地形进行动态仿真与分析。
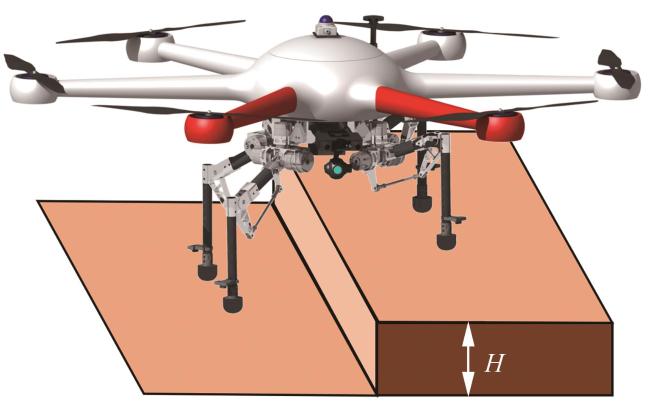
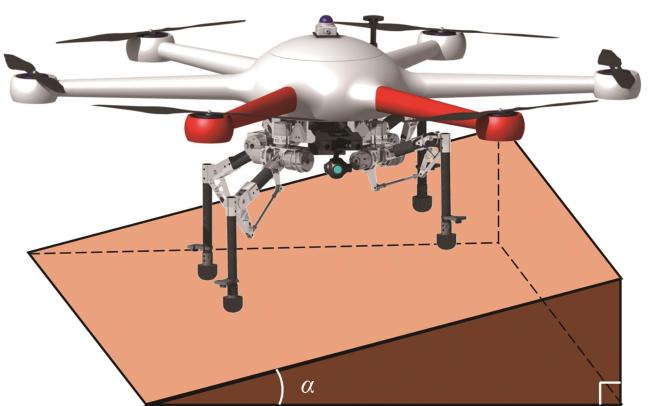
对于整机在复杂地形条件下的着陆,分别建立高度差H=200 mm与坡脚α=15°的地面模型,并建立接触模型,设置接触刚度K n为8 000 N/m、接触阻尼D n为800 N/(m∙s-1)、动摩擦系数 为0.5、静摩擦系数 为0.7。飞行器整机质量为40 kg,下沉速度2 m/s,各着陆腿阻抗参数均取 、 、 ,飞行器在各地形下着陆响应如图17所示。
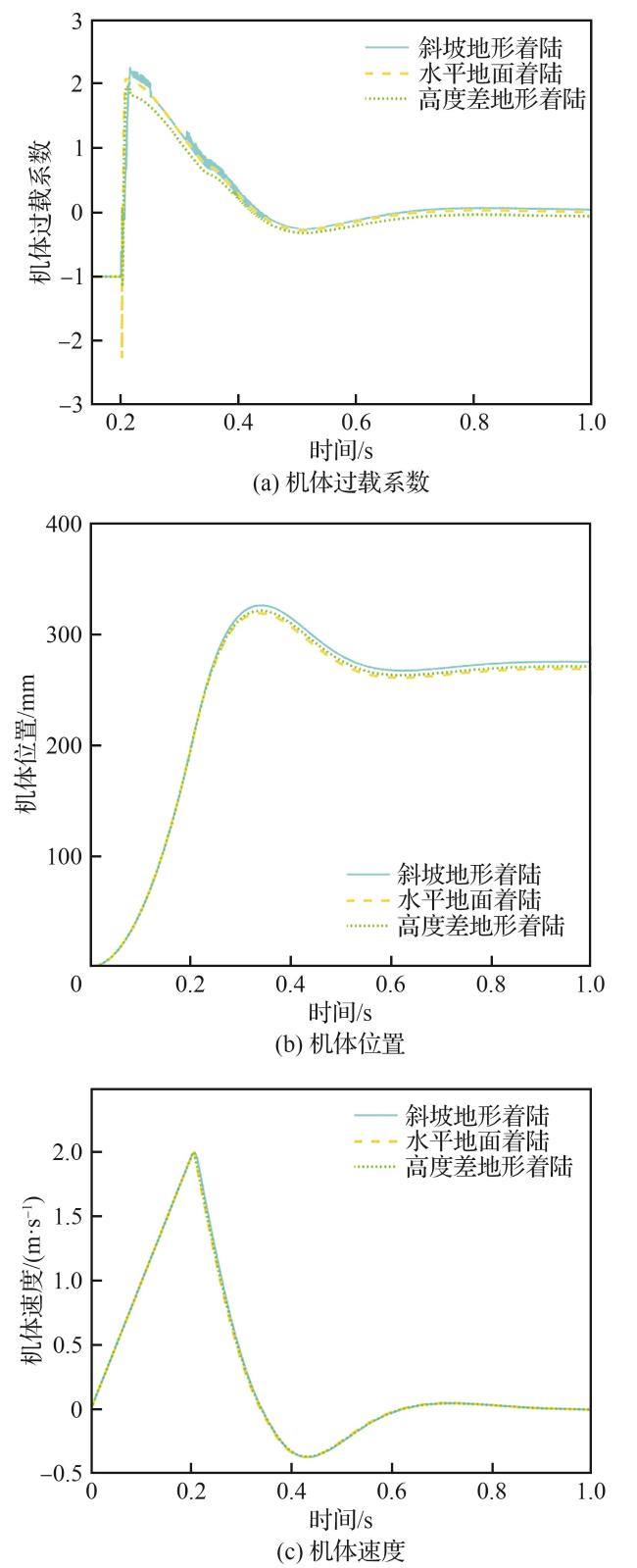
由图17可见,采用主动柔顺控制的腿足式起落架在不同地形条件下均展现出一致且优越的着陆缓冲性能。机体载荷峰值约为2g,冲击强度处于安全范围内,不会对机体结构及机载设备造成损害。此外,在下落及缓冲过程中,机体位置与速度变化平稳,超调量较小,系统能够快速收敛并稳定着陆,有效提升了着陆的安全性与可靠性。
低空环境的复杂性不仅体现在地形的多样性,还涉及多种动态和静态因素的影响。例如,低空区域受建筑物、地形起伏、障碍物干扰等因素的影响,易形成湍流和阵风,使飞行器在着陆过程中伴随一定的侧向速度。因此,起降系统不仅需具备良好的垂向缓冲性能,还需具备有效的侧向冲击吸收能力,以提升飞行器的着陆稳定性和适应性。
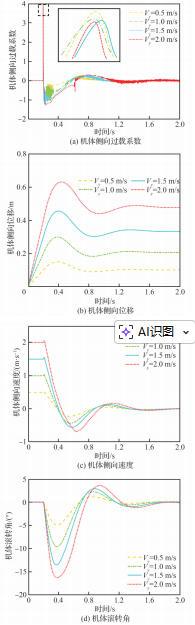
基于此,还需进一步研究飞行器在着陆过程中伴随侧向速度时的动力学特性,重点分析主动柔顺控制对机体冲击载荷和姿态调整的影响,优化腿式起落架在侧向冲击下的缓冲响应,提高系统在非理想着陆条件下的稳定性。在水平地面以2 m/s的下沉速度着陆的基础上,依次引入0.5、1、1.5、2 m/s不同的侧向速度,机体响应如图18所示。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
分析缓冲响应曲线可得:在4个侧向着陆速度条件下,机体侧向载荷峰值均约为4g,表明主动柔顺控制能够有效降低初始侧向冲击,并加速冲击能量的衰减。此外,飞行器触地后,机体的侧向位移与速度在较短时间内稳定,避免了因侧向滑移或过大冲击导致的着陆失稳。
另一方面,由于足端触地后受到地面摩擦力与机身惯性的作用,系统会产生滚转力矩,使机体出现一定的滚转角偏差。随着侧向着陆速度的增加,该滚转角偏差亦随之增大。然而,主动柔顺控制能够快速抑制滚转角的增长,使机体姿态迅速恢复平稳,确保飞行器在不同侧向着陆条件下均能稳定着陆。
以上研究验证了基于主动柔顺控制的自适应起落架在不同着陆工况中的有效性,显著提升了飞行器对不同地形特征和着陆条件的适应能力。该起落架不仅能有效减小垂向与侧向冲击、降低机体载荷峰值,还可在非理想着陆条件下保持较高的姿态稳定性,从而提升飞行器的整体安全性与可靠性。
4 结 论
1) 基于蝗虫后腿结构设计了一种四足自适应起落架,通过引入多自由度关节,相比固定式起落架,该仿生起落架使飞行器具备210 mm高度差与16°坡角的地形适应性,扩宽了多旋翼飞行器运用范围。
2) 结合基于力的阻抗控制理论,实现了关节刚度与阻尼的主动调节,使起落架在不同着陆条件下均能有效吸收冲击能量,降低机体过载峰值。通过MATLAB仿真,对比分析了无缓冲、关节缓冲和主动柔顺控制3种方案。结果表明,主动柔顺控制能有效降低着陆冲击,使机体过载相比无缓冲减少约82.4%,比关节缓冲减少约70%;股关节扭矩相比无缓冲减少约78.5%,比关节缓冲减少约58.6%;胫关节扭矩相比无缓冲减少约76.7%,比关节缓冲减少约67.8%,显著降低了机体着陆冲击与关节载荷。
3) 探究了阻抗系数对着陆缓冲性能的影响,刚度系数K s直接影响机体机载和机身位置精度;阻尼系数K d影响缓冲过程中的能量吸收与振荡特性。
4) 在200 mm高度差地形和15°斜坡地形下,主动柔顺控制能使机体过载峰值保持在2g左右,与水平地面着陆保持一致性,确保着陆安全;在伴随侧向速度的着陆工况下,主动柔顺控制策略可降低机体侧向载荷峰值至4g左右,有效减少机体侧向冲击,并在短时间内稳定姿态。