Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (23): 632457.doi: 10.7527/S1000-6893.2025.32457
• special column • Previous Articles
Qi LIU, Zhixiang PEI, Le HUI, Mingyi HE, Yuchao DAI( )
)
Received:2025-06-23
Revised:2025-07-28
Accepted:2025-08-19
Online:2025-09-09
Published:2025-09-05
Contact:
Yuchao DAI
E-mail:daiyuchao@nwpu.edu.cn
Supported by:CLC Number:
Qi LIU, Zhixiang PEI, Le HUI, Mingyi HE, Yuchao DAI. Dual-branch feature aggregation for UAV visual place recognition[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(23): 632457.
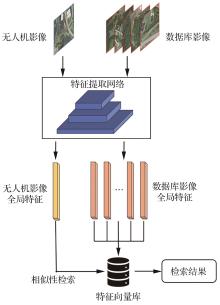
Fig.1
Process of UAV visual place recognition
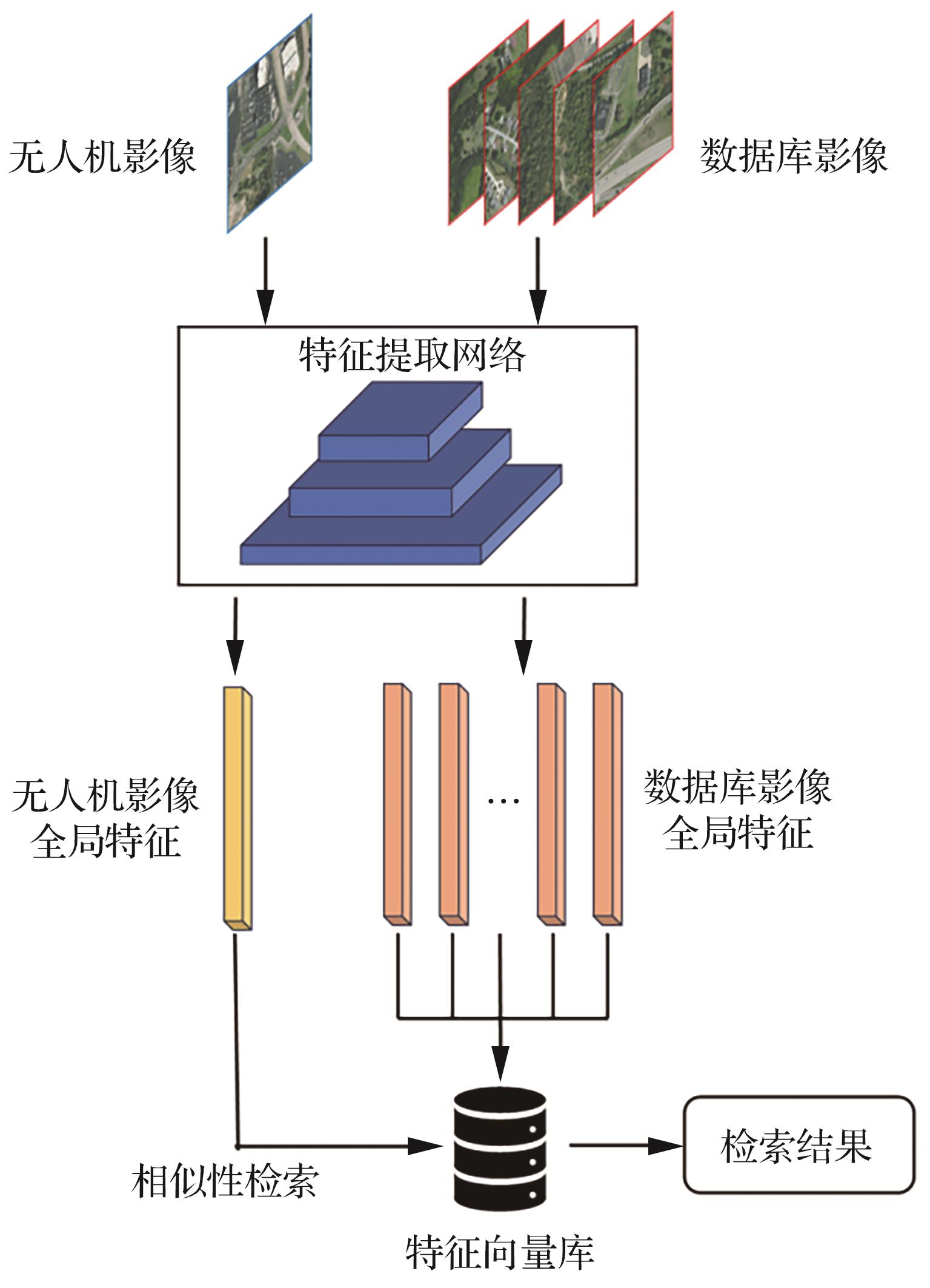
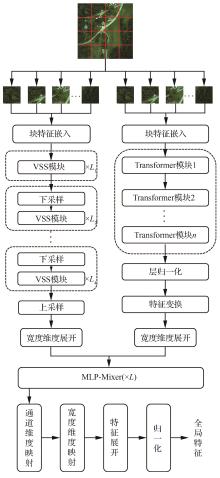
Fig. 2
Dual-branch feature enhancement network
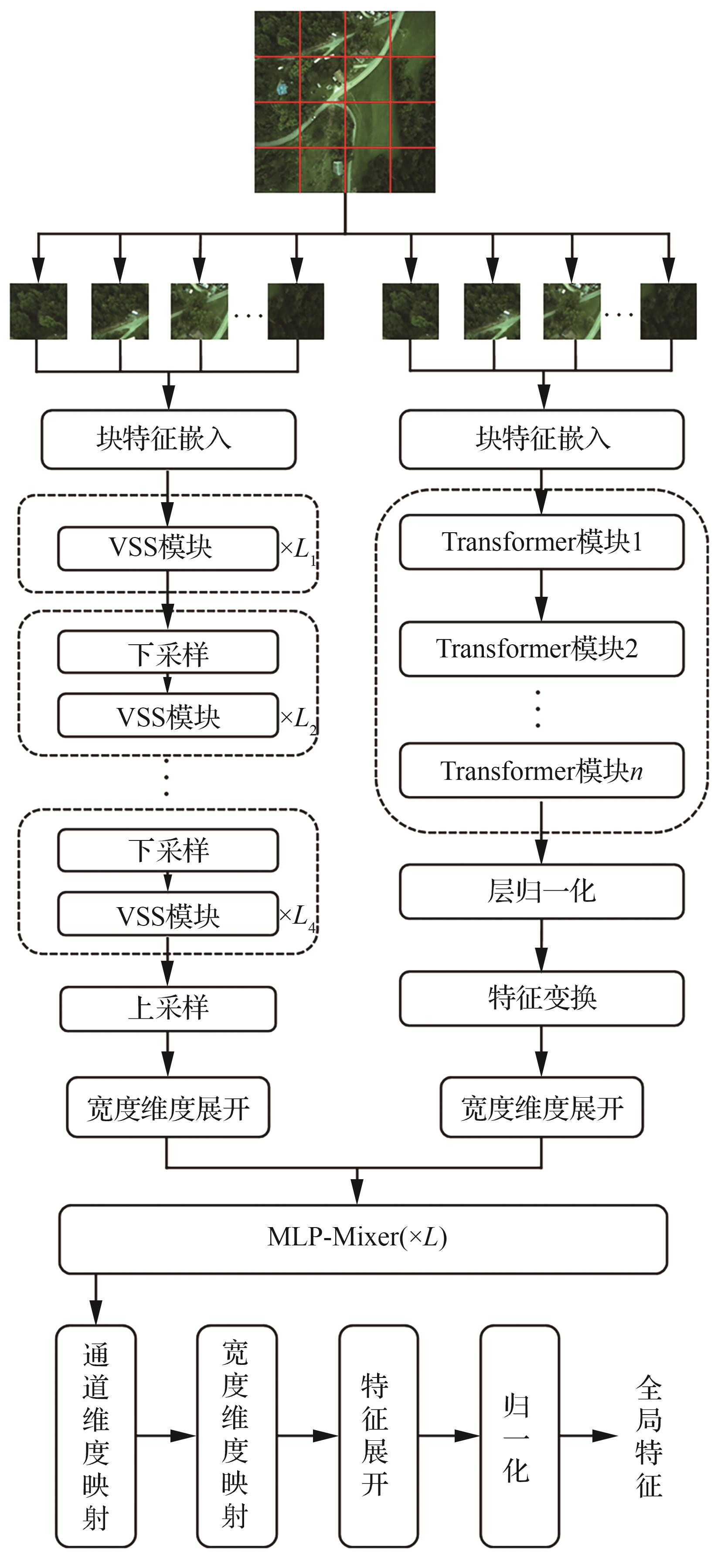
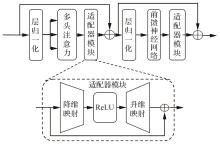
Fig. 3
Transformer network structure
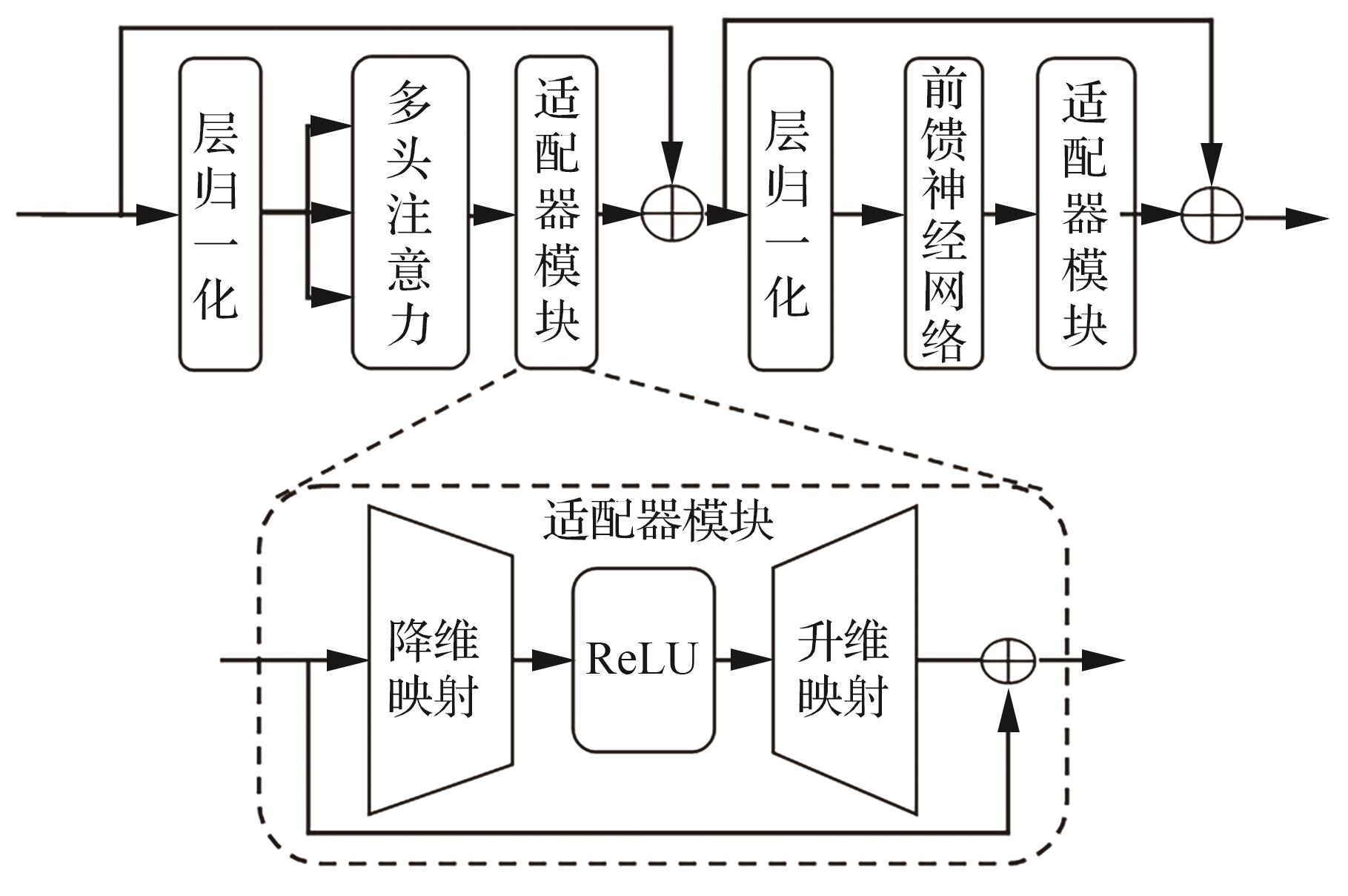
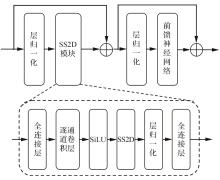
Fig. 4
Visual state space model network structure
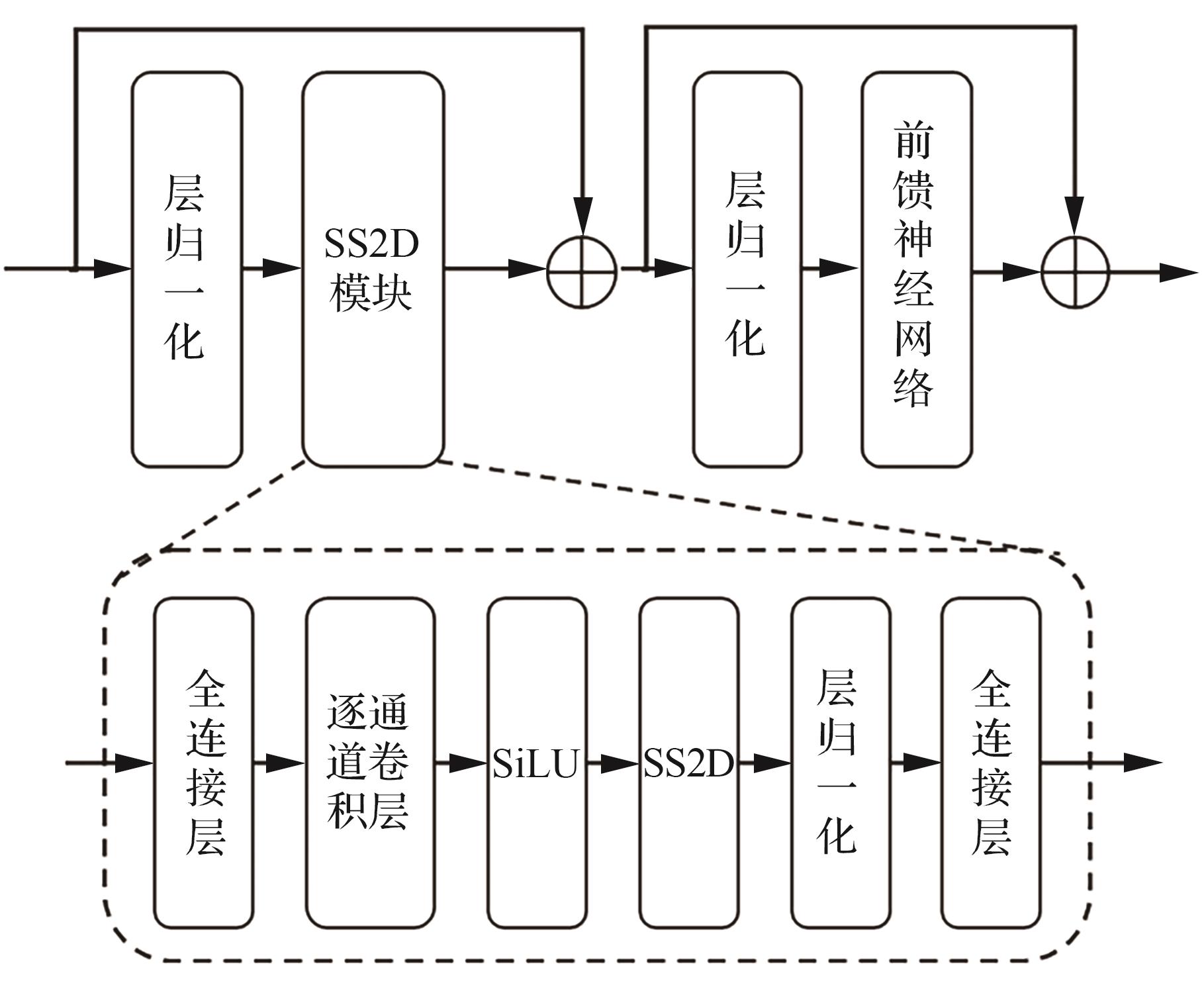
Fig. 5
Feature aggregation network structure
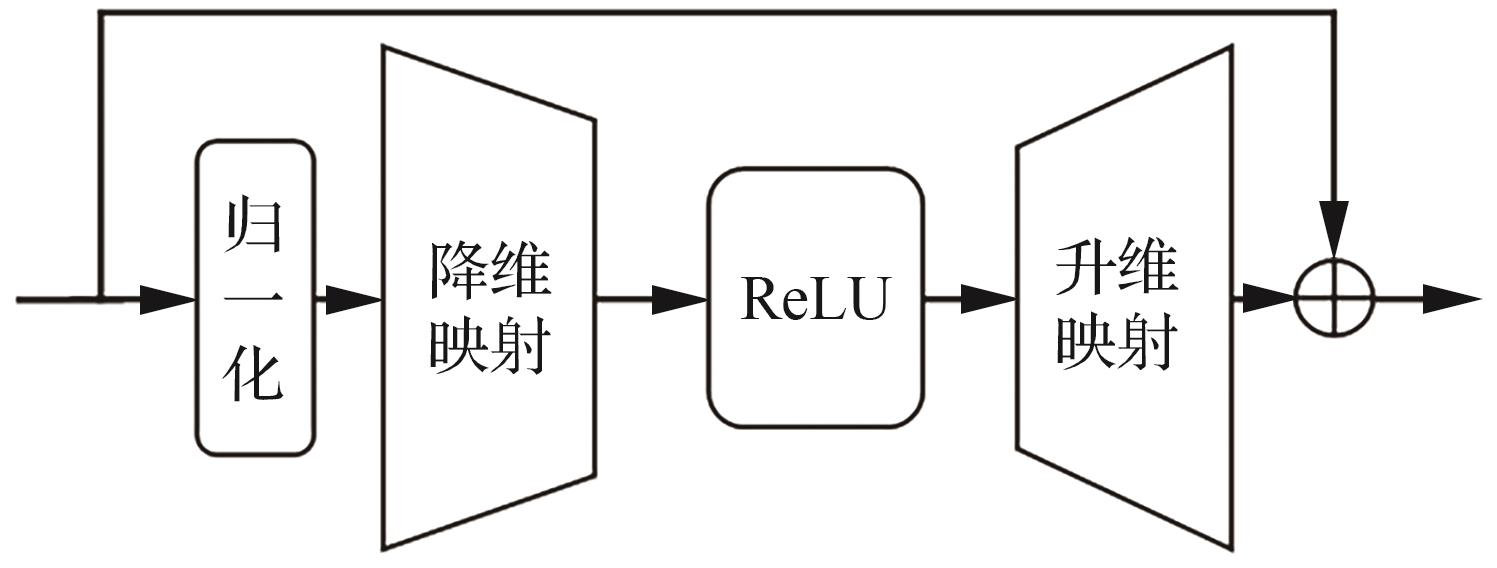
Table 1
Experimental results on ALTO dataset
| 方法 | R@1/% | R@5/% | R@10/% | 参数量/106 | 运行时间/s |
|---|---|---|---|---|---|
| ConvNeXt+netvlad | 24.5 | 66.7 | 82.4 | 88.17 | 0.006 |
| Dinov2+netvlad | 31.2 | 80.8 | 94.7 | 355.38 | 0.101 |
| ConvNeXt+gem | 37.5 | 84.3 | 97.0 | 87.57 | 0.005 |
| MixVPR | 42.2 | 90.0 | 97.7 | 88.63 | 0.007 |
| SelaVPR | 43.1 | 93.1 | 98.8 | 354.77 | 0.112 |
| 本文方法 | 47.7 | 95.7 | 99.9 | 444.10 | 0.120 |
Fig. 6
Visualization results on ALTO dataset
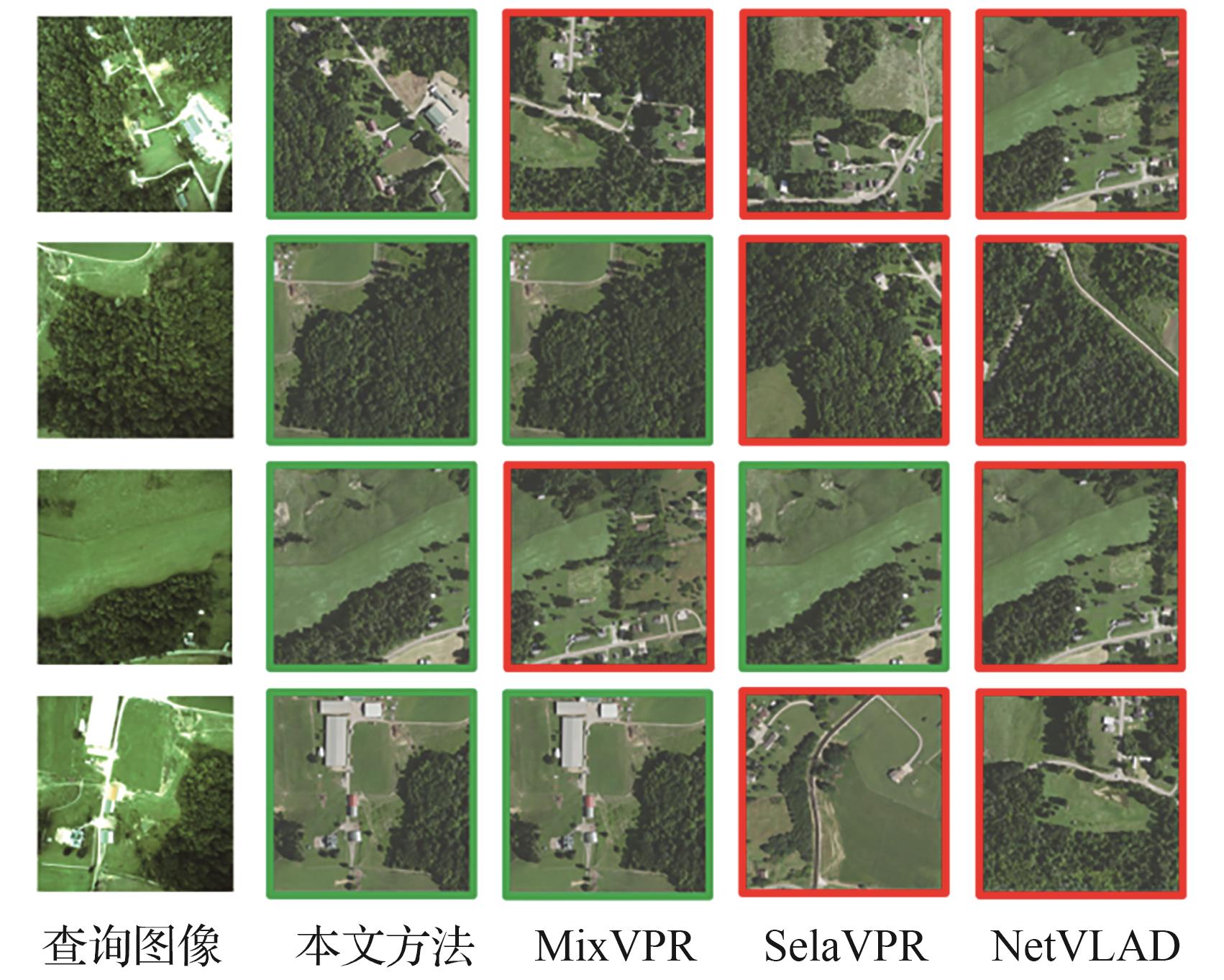
Table 2
Experimental results on VIGOR dataset
| 方法 | R@1/% | R@5/% | R@10/% | R@1%/% |
|---|---|---|---|---|
| SAFA | 33.93 | 58.42 | 68.12 | 98.24 |
| TransGeo | 61.48 | 87.54 | 91.88 | 99.56 |
| DINOv2+GeM | 75.01 | 94.96 | 96.86 | 99.62 |
| Sample4geo | 77.86 | 95.66 | 97.21 | 99.61 |
| 本文方法 | 79.43 | 97.16 | 98.30 | 99.79 |
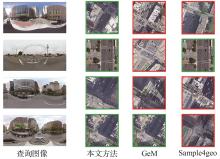
Fig.7
Visualization results on VIGOR dataset
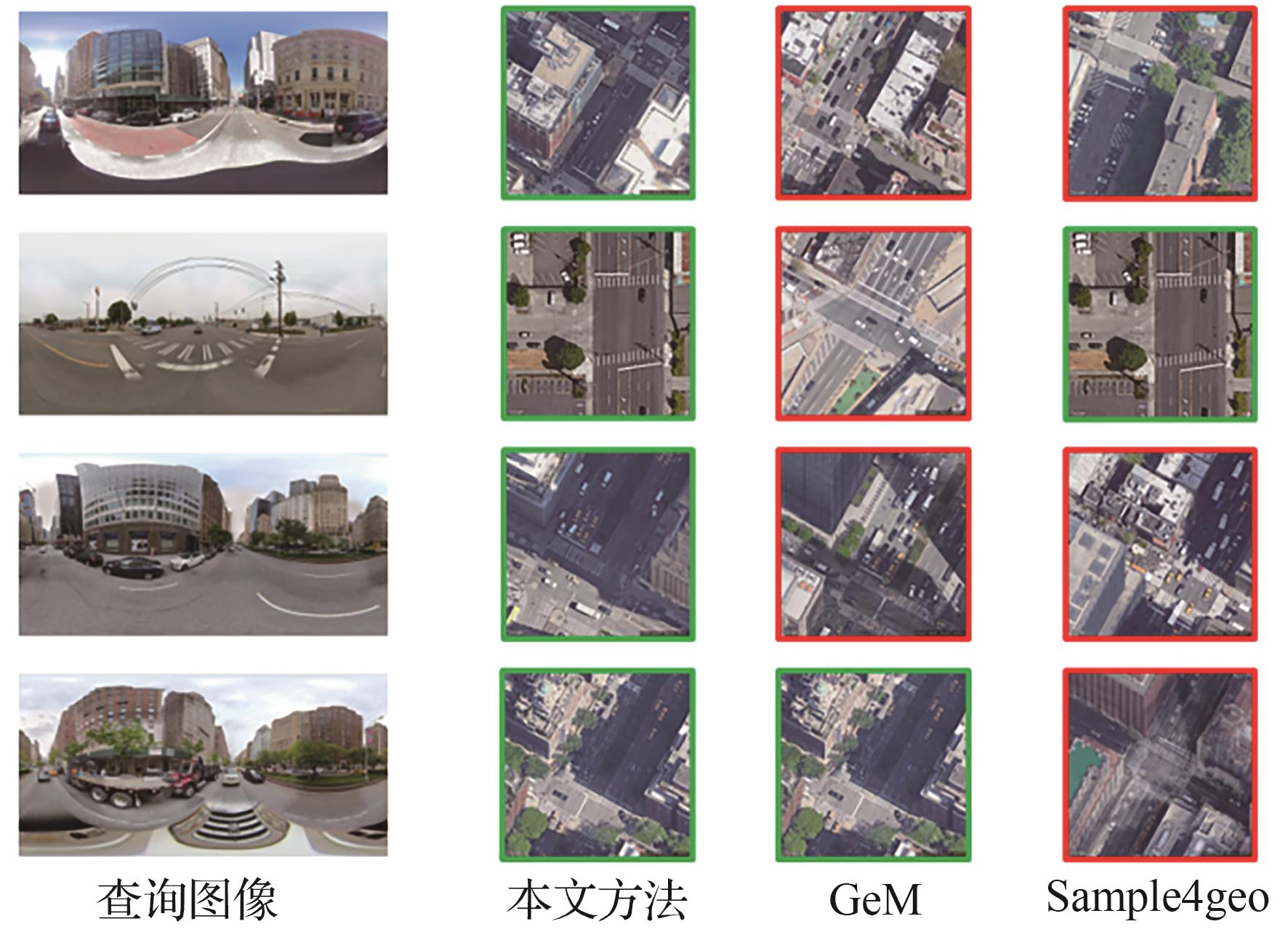
Table 3
Results with different MLP depths
| MLP层数 | R@1/% | R@5/% | R@10/% |
|---|---|---|---|
| 0 | 44.2 | 90.4 | 98.9 |
| 2 | 46.0 | 92.1 | 99.8 |
| 4 | 47.7 | 95.7 | 99.9 |
| 8 | 47.9 | 95.2 | 100.0 |
Table 4
Ablation study on loss function
| 损失函数 | R@1/% | R@5/% | R@10/% |
|---|---|---|---|
| 三元组损失 | 44.9 | 94.8 | 99.6 |
| 多集损失 | 47.7 | 95.7 | 99.9 |
Table 5
Ablation study on backbone combination
| 主干网络 | R@1/% | R@5/% | R@10/% |
|---|---|---|---|
| DINOv2 | 44.1 | 94.6 | 99.5 |
| VMamba | 41.7 | 94.0 | 99.5 |
| 本文方法 | 47.7 | 95.7 | 99.9 |
Table 6
Experimental results of backbone network parameters and inference time
| 主干网络 | 参数量/106 | 推理时间/s |
|---|---|---|
| DINOv2 | 354.77 | 0.095 7 |
| VMamba | 50.18 | 0.004 2 |
| 本文方法 | 444.10 | 0.120 4 |
Table 7
Experimental results on NewYorkFly dataset
| 方法 | R@1/% | R@5/% | R@10/% |
|---|---|---|---|
| SelaVPR | 26.5 | 75.2 | 89.4 |
| DINOv2+netvlad | 14.1 | 52.3 | 74.8 |
| ConvNeXt +gem | 28.3 | 82.1 | 91.5 |
| ConvNeXt +netvlad | 5.9 | 24.7 | 42.2 |
| MixVPR | 63.7 | 82.4 | 98.9 |
| 本文方法 | 68.5 | 93.2 | 99.1 |
| [1] | LYU M Y, ZHAO Y B, HUANG C, et al. Unmanned aerial vehicles for search and rescue: A survey[J]. Remote Sensing, 2023, 15(13): 3266. |
| [2] | 冷佳旭, 莫梦竟成, 周应华, 等. 无人机视角下的目标检测研究进展[J]. 中国图象图形学报, 2023, 28(9): 2563-2586. |
| LENG J X, MO M, ZHOU Y H, et al. Recent advances in drone-view object detection[J]. Journal of Image and Graphics, 2023, 28(9): 2563-2586 (in Chinese). | |
| [3] | CANDIAGO S, REMONDINO F, DE GIGLIO M, et al. Evaluating multispectral images and vegetation indices for precision farming applications from UAV images[J]. Remote Sensing, 2015, 7(4): 4026-4047. |
| [4] | MENOUAR H, GUVENC I, AKKAYA K, et al. UAV-enabled intelligent transportation systems for the smart city: applications and challenges[J]. IEEE Communications Magazine, 2017, 55(3): 22-28. |
| [5] | GYAGENDA N, HATILIMA J V, ROTH H, et al. A review of GNSS-independent UAV navigation techniques[J]. Robotics and Autonomous Systems, 2022, 152: 104069. |
| [6] | 吴成一. GNSS拒止条件下的无人机视觉导航研究[D]. 西安: 西安电子科技大学, 2021. |
| WU C Y. GNSS-denied UAV visual navigation research[D]. Xi’an: Xidian University, 2021 (in Chinese). | |
| [7] | ARAFAT M Y, ALAM M M, MOH S. Vision-based navigation techniques for unmanned aerial vehicles: review and challenges[J]. Drones, 2023, 7(2): 89. |
| [8] | GUPTA A, FERNANDO X. Simultaneous localization and mapping (SLAM) and data fusion in unmanned aerial vehicles: recent advances and challenges[J]. Drones, 2022, 6(4): 85. |
| [9] | 袁媛, 孙柏, 刘赶超. 景象匹配无人机视觉定位[J]. 自动化学报, 2025, 51(2): 287-311. |
| YUAN Y, SUN B, LIU G C. Drone-based scene matching visual geo-localization[J]. Acta Automatica Sinica, 2025, 51(2): 287-311 (in Chinese). | |
| [10] | VAN DALEN G J, MAGREE D P, JOHNSON E N. Absolute localization using image alignment and particle filtering[C]∥ AIAA Guidance, Navigation, and Control Conference. Reston: AIAA, 2016: 0647. |
| [11] | MANTELLI M, PITTOL D, NEULAND R, et al. A novel measurement model based on abBRIEF for global localization of a UAV over satellite images[J]. Robotics and Autonomous Systems, 2019, 112: 304-319. |
| [12] | COUTURIER A, AKHLOUFI M A. UAV navigation in GPS-denied environment using particle filtered RVL[C]∥ Situation Awareness in Degraded Environments 2019. Baltimore: SPIE, 2019: 188-198. |
| [13] | MOSKALENKO I, KORNILOVA A, FERRER G. Visual place recognition for aerial imagery: A survey[J]. Robotics and Autonomous Systems, 2025, 183: 104837. |
| [14] | XU W, YAO Y, CAO J, et al. UAV-VisLoc: A large-scale dataset for UAV visual localization[DB/OL]. arXiv preprint: 2405.11936, 2024. |
| [15] | CISNEROS I, YIN P, ZHANG J, et al. ALTO: A Large-Scale Dataset for UAV Visual Place Recognition and Localization[DB/OL]. arXiv preprint: 2207.12317, 2022. |
| [16] | ZHU S J, YANG T, CHEN C. VIGOR: cross-view image geo-localization beyond one-to-one retrieval[C]∥ 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2021: 5316-5325. |
| [17] | ZHENG Z D, WEI Y C, YANG Y. University-1652: A multi-view multi-source benchmark for drone-based geo-localization[C]∥ Proceedings of the 28th ACM International Conference on Multimedia. New York: ACM, 2020: 1395-1403. |
| [18] | RADENOVIĆ F, TOLIAS G, CHUM O. Fine-tuning CNN image retrieval with No human annotation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2019, 41(7): 1655-1668. |
| [19] | ARANDJELOVIĆ R, GRONAT P, TORII A, et al. NetVLAD: CNN architecture for weakly supervised place recognition[C]∥ Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2016: 5297-5307. |
| [20] | BERTON G, MASONE C, CAPUTO B. Re-thinking visual geo-localization for large-scale applications[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2022: 4878-4888. |
| [21] | BERTON G, TRIVIGNO G, CAPUTO B, et al. EigenPlaces: Training viewpoint robust models for visual place recognition[C]∥2023 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE Press, 2023: 11046-11056. |
| [22] | ALI-BEY A, CHAIB-DRAA B, GIGUERE P. MixVPR: feature mixing for visual place recognition[C]∥ 2023 IEEE/CVF Winter Conference on Applications of Computer Vision (WACV). Piscataway: IEEE Press, 2023: 2998-3007. |
| [23] | LU F, ZHANG L, LAN X, et al. Towards Seamless Adaptation of Pre-trained Models for Visual Place Recognition[C]∥ International Conference on Learning Representations (ICLR). Vienna: ICLR, 2024:11133-11154. |
| [24] | OQUAB M, DARCET T, MOUTAKANNI T, et al. DINOv2: Learning Robust Visual Features without Supervision[DB/OL]. arXiv preprint: 2304.07193, 2024. |
| [25] | LIU Y, TIAN Y, ZHAO Y, et al. Vmamba: Visual state space model[J]. Advances in neural information processing systems, 2024, 37: 103031-103063. |
| [26] | TOLSTIKHIN I O, HOULSBY N, KOLESNIKOV A, et al. MLP-mixer: an all-MLP architecture for vision[C]∥ Neural Information Processing Systems. New York: Curran Associates Inc., 2021:24261-24272. |
| [27] | KEETHA N, MISHRA A, KARHADE J, et al. AnyLoc: Towards universal visual place recognition[J]. IEEE Robotics and Automation Letters, 2024, 9(2): 1286-1293. |
| [28] | AdaptFormer: Adapting vision transformers for scalable visual recognition[C]∥ Proceedings of the 36th International Conference on Neural Information Processing Systems. New York: ACM, 2022: 16664-16678. |
| [29] | YUAN Y, CHEN W Y, YANG Y, et al. In defense of the triplet loss again: learning robust person re-identification with fast approximated triplet loss and label distillation[C]∥ 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Piscataway: IEEE Press, 2020: 1454-1463. |
| [30] | LIU Z, MAO H Z, WU C Y, et al. A ConvNet for the 2020s[C]∥ 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2022: 11966-11976. |
| [31] | SHI Y, LIU L, YU X, et al. Spatial-aware feature aggregation for cross-view image based geo-localization[M]∥Proceedings of the 33rd International Conference on Neural Information Processing Systems. New York: Curran Associates Inc., 2019: 10090-10100. |
| [32] | ZHU S J, SHAH M, CHEN C. TransGeo: transformer is all you need for cross-view image geo-localization[C]∥ 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2022: 1152-1161. |
| [33] | DEUSER F, HABEL K, OSWALD N. Sample4Geo: hard negative sampling for cross-view geo-localisation[C]∥ 2023 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE Press, 2023: 16801-16810. |
| [34] | WANG Z, SHI D X, QIU C P, et al. Sequence matching for image-based UAV-to-satellite geolocalization[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5607815. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341