Acta Aeronautica et Astronautica Sinica ›› 2024, Vol. 45 ›› Issue (S1): 730768.doi: 10.7527/S1000-6893.2024.30768
• Articles • Previous Articles Next Articles
Ming LU( ), Nuo SU, Weiheng ZHAO, Ge CAO, Limei TIAN, Qiang ZHANG
), Nuo SU, Weiheng ZHAO, Ge CAO, Limei TIAN, Qiang ZHANG
Received:2024-06-03
Revised:2024-07-11
Accepted:2024-08-20
Online:2024-12-25
Published:2024-09-02
Contact:
Ming LU
E-mail:lmuing@hotmail.com
Supported by:CLC Number:
Ming LU, Nuo SU, Weiheng ZHAO, Ge CAO, Limei TIAN, Qiang ZHANG. Anti-interference control of a single-frame controlled moment SGCMG servo system based on integral terminal sliding mode[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730768.
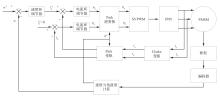
Fig.1
SGCMG overall block diagram[23]
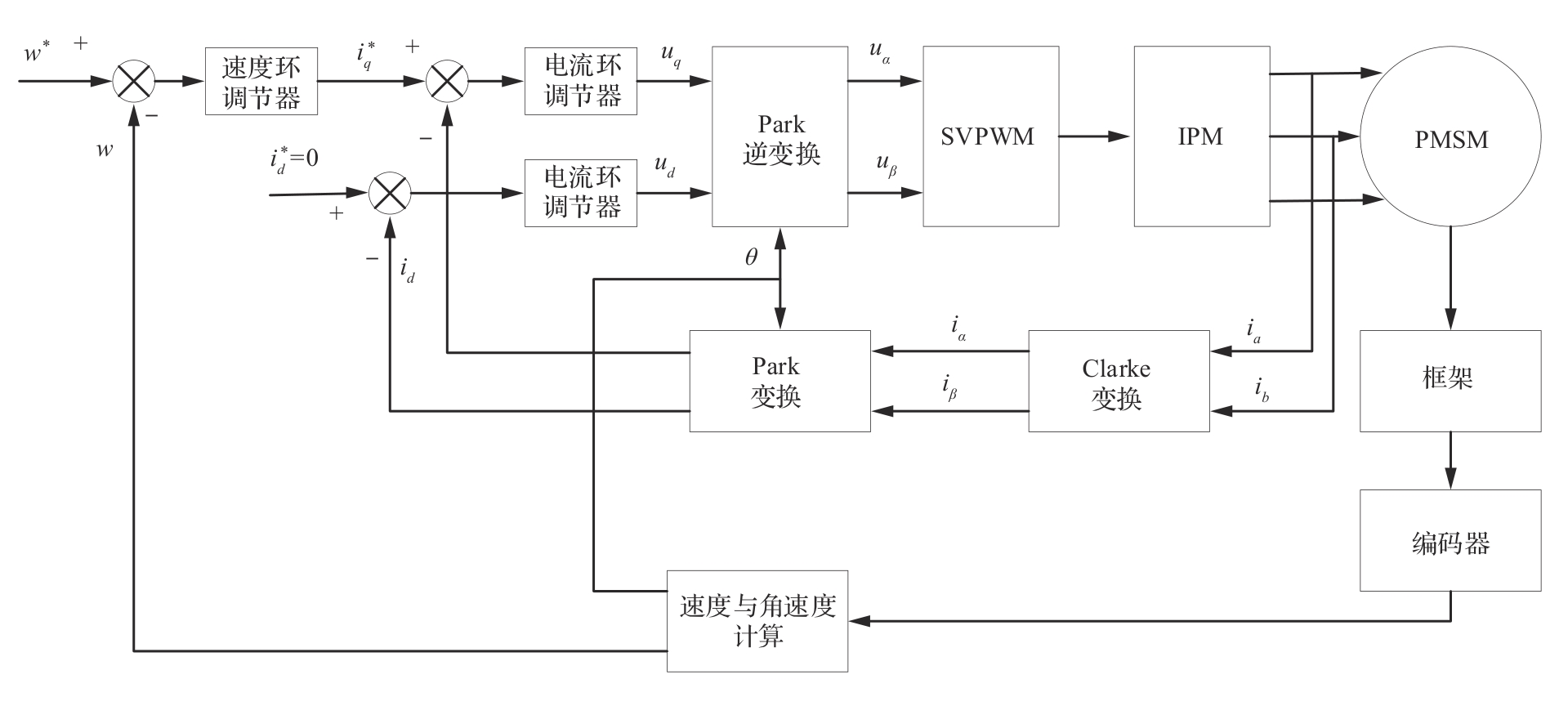
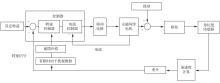
Fig.2
Block diagram of SGCMG servo system of the composite controller
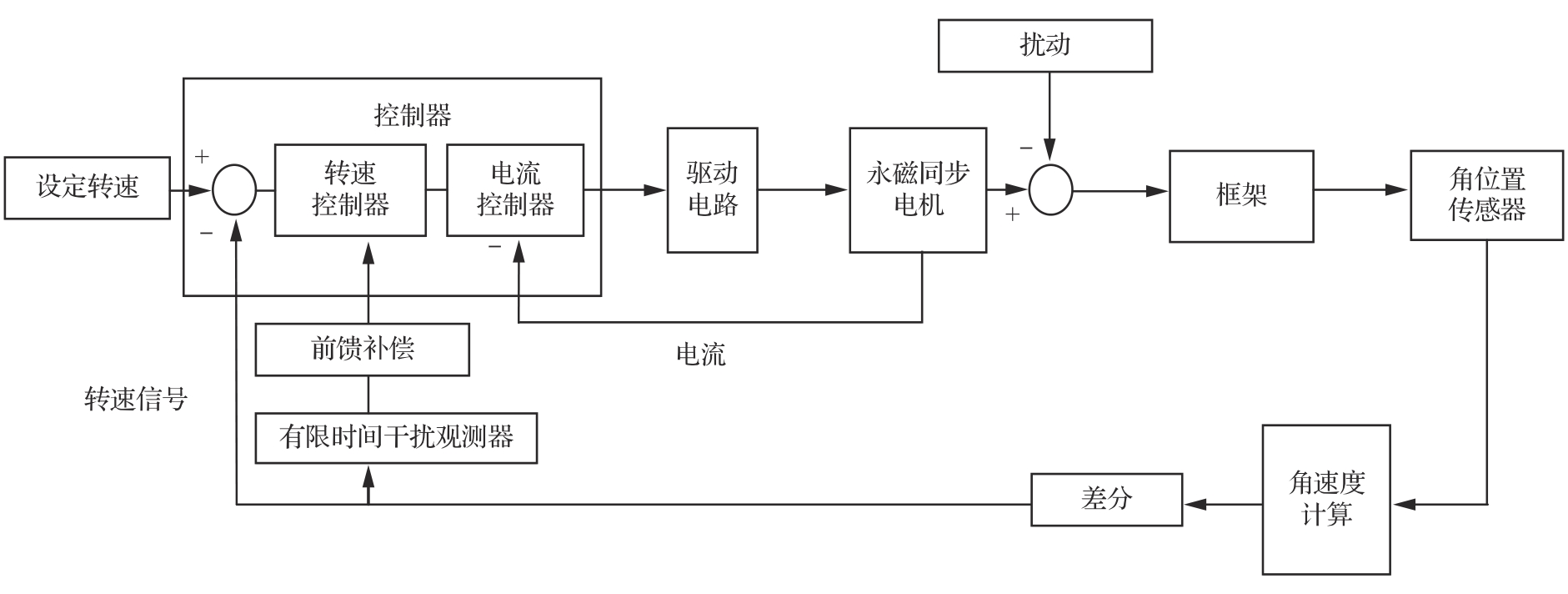

Fig.3
Block diagram of dynamics of SGCMG frame servo system
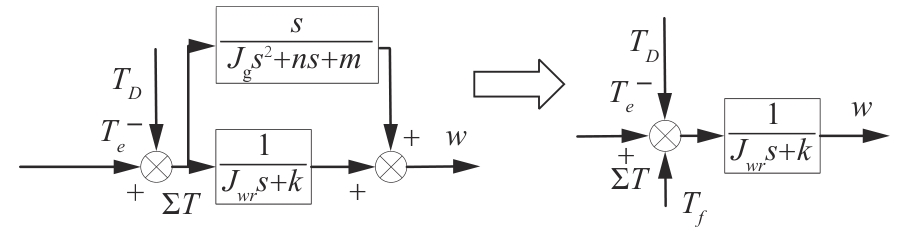
Table 1
SGCMG related parameter table
| 指标 | 数值 |
|---|---|
| 0.68 | |
| 0.86 | |
| 4 | |
| 8 | |
| 0.625 | |
| 7/12 | |
| 0.001 |
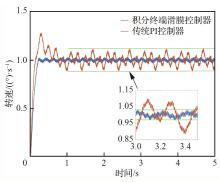
Fig.4
RPM response curves under PI and ISM
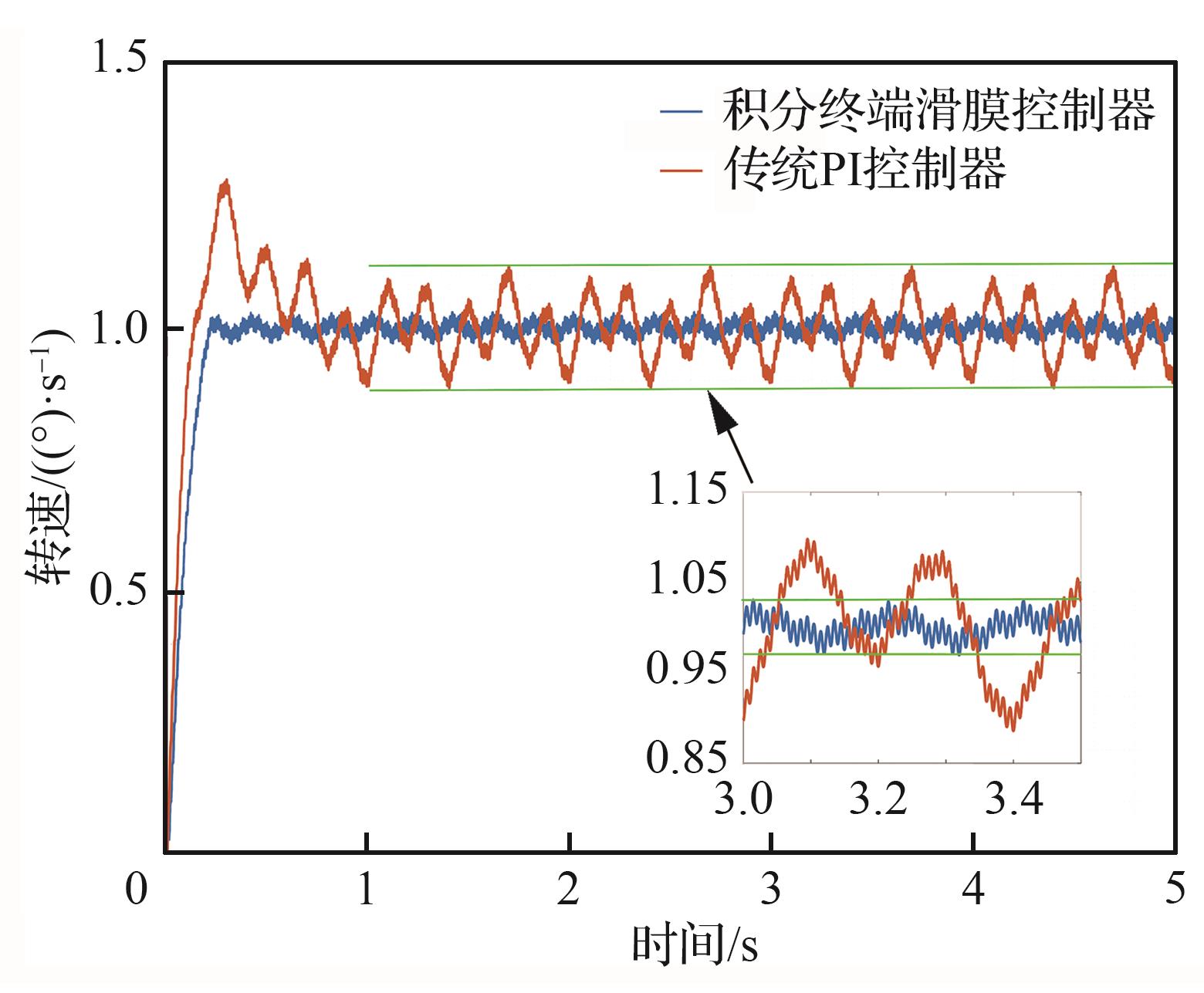
Table 2
Controller key parameters
| 参数 | 数值 |
|---|---|
| L | 1 |
| t | 1 |
| Kp | 3/5 |
| m | 1 |
| p | 3/5 |
Fig.5
Set of total perturbation values versus observed perturbation values
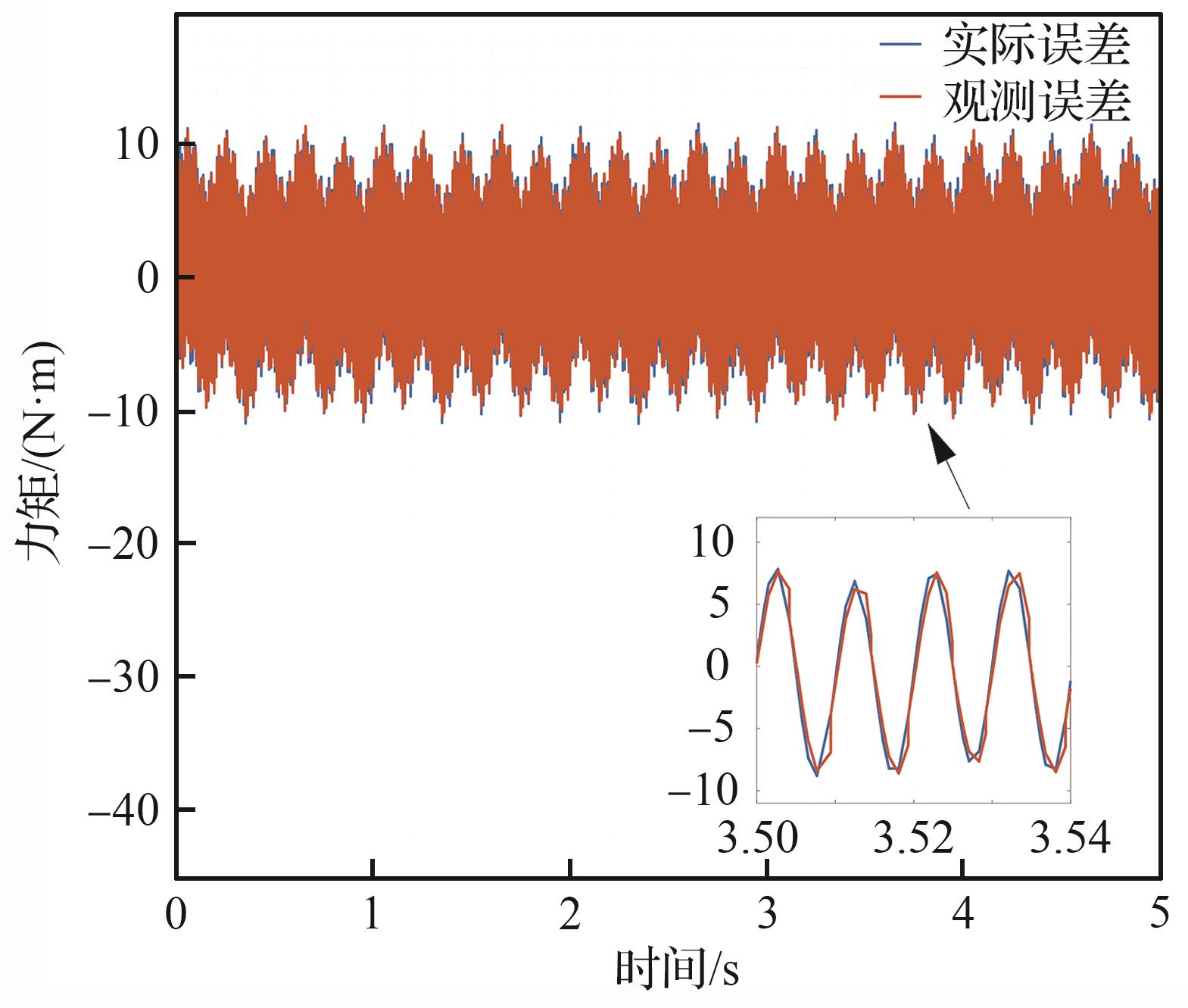
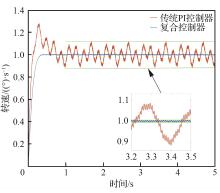
Fig.6
Speed response curves with PI and composite controller
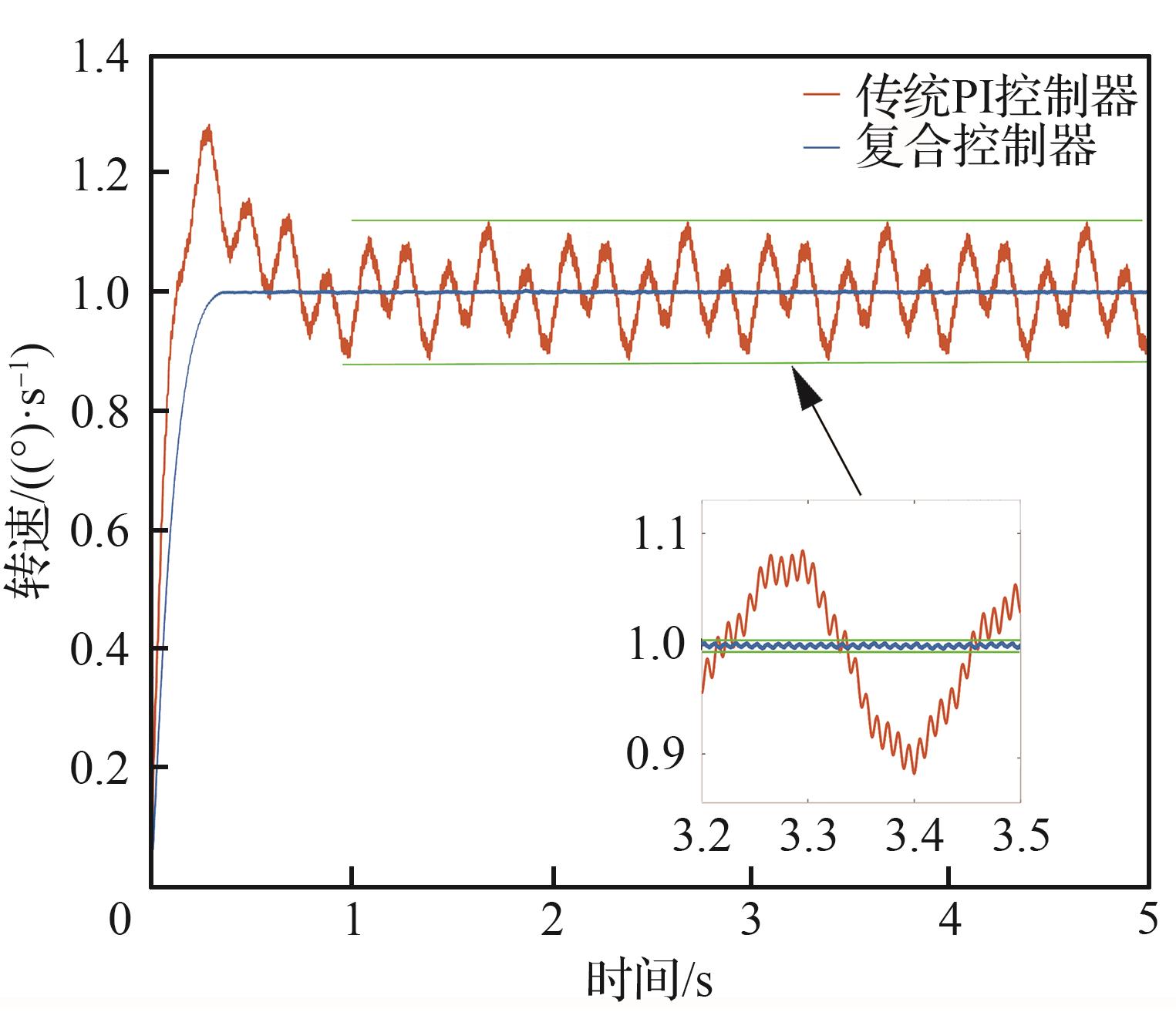
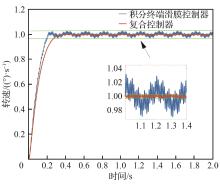
Fig.7
Speed response curves under ISM with composite control
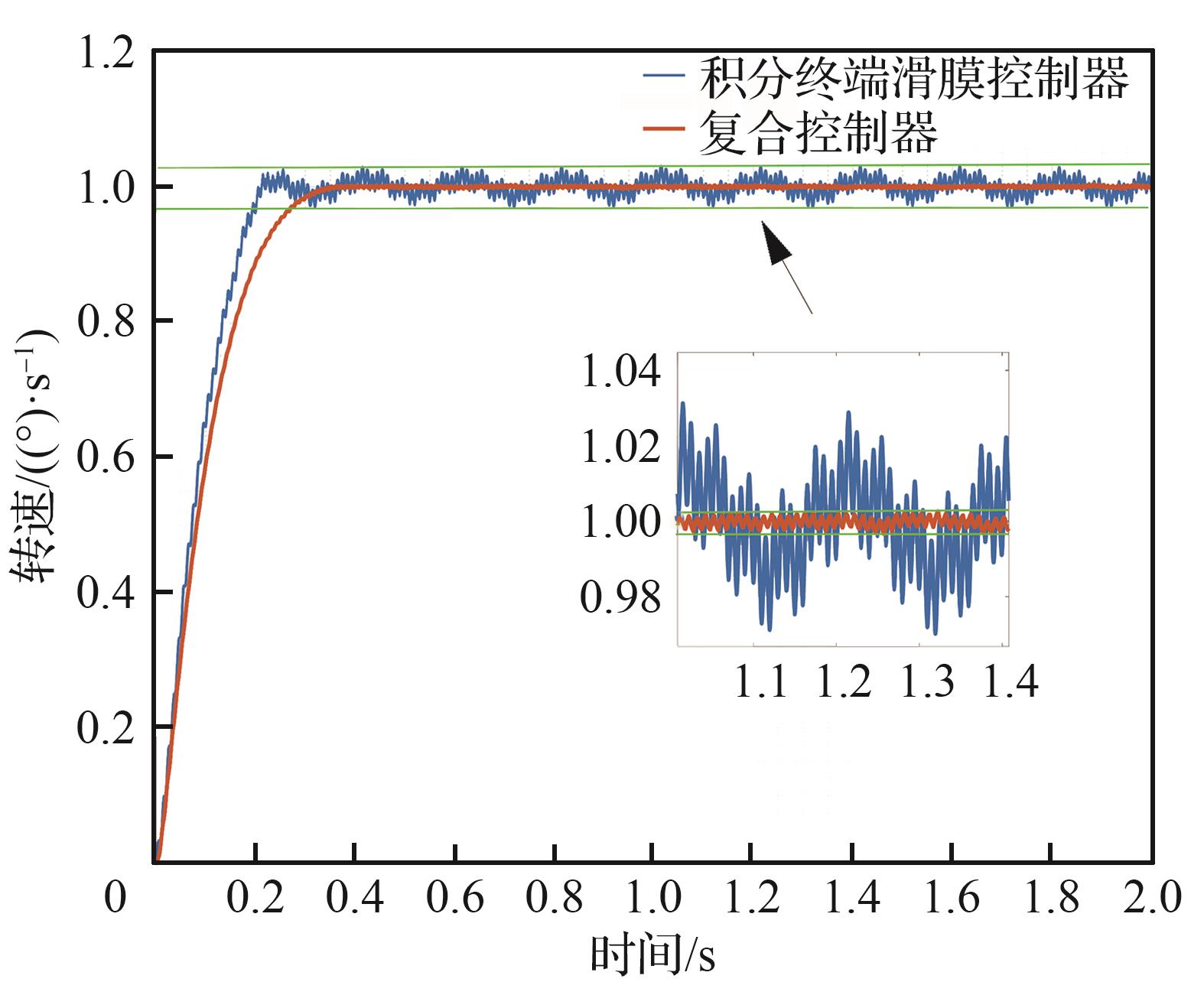
Table 3
System performance metrics under different controls
| 性能指标 | PI | ITSM | ISM+FTDO |
|---|---|---|---|
| 30 | 6 | 1 | |
| 0.5 | 0.3 | 0.4 | |
Fig.8
Difference between observed and true values at a frequency of 1 Hz
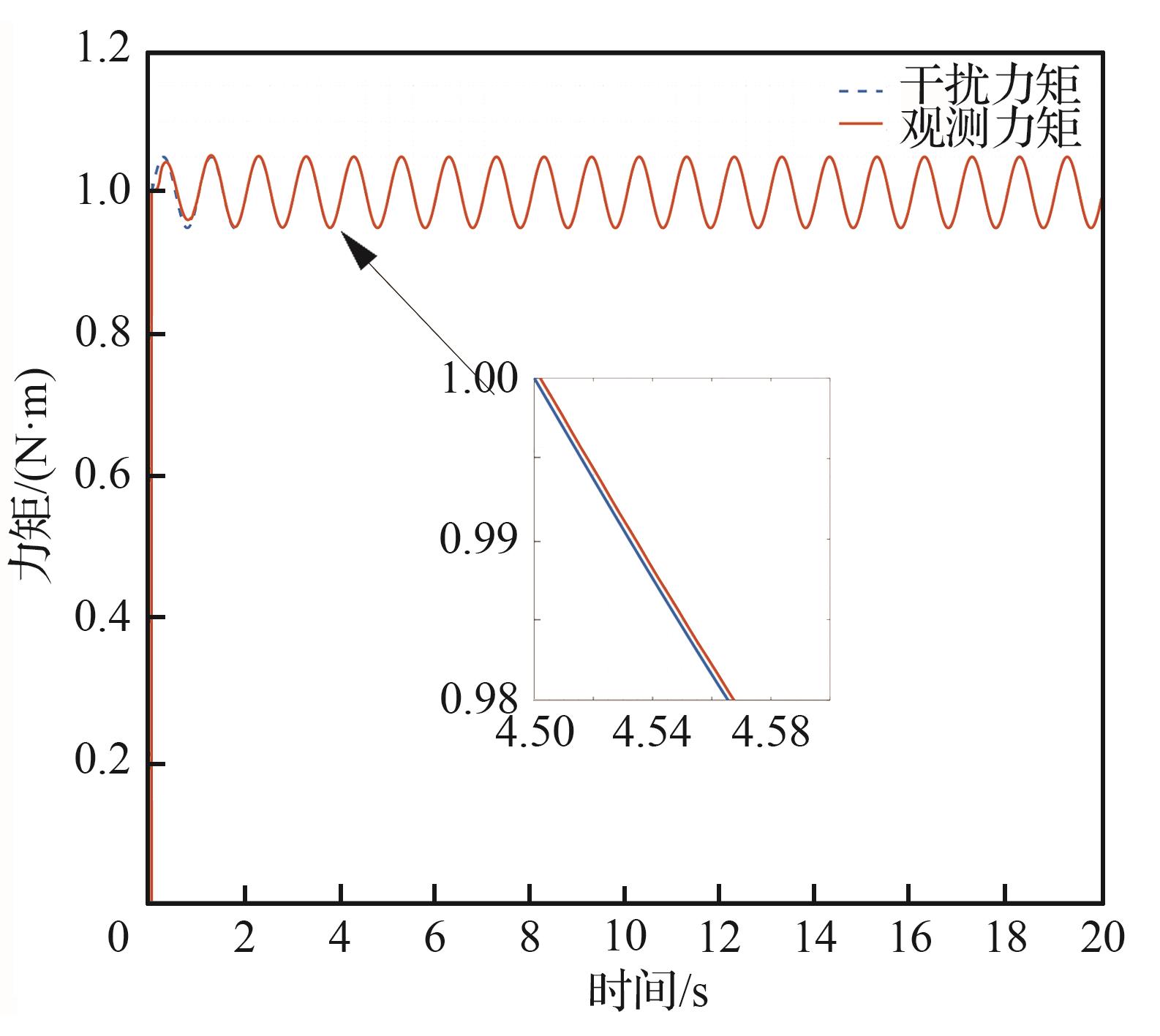
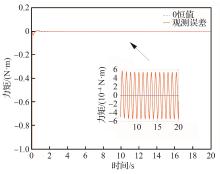
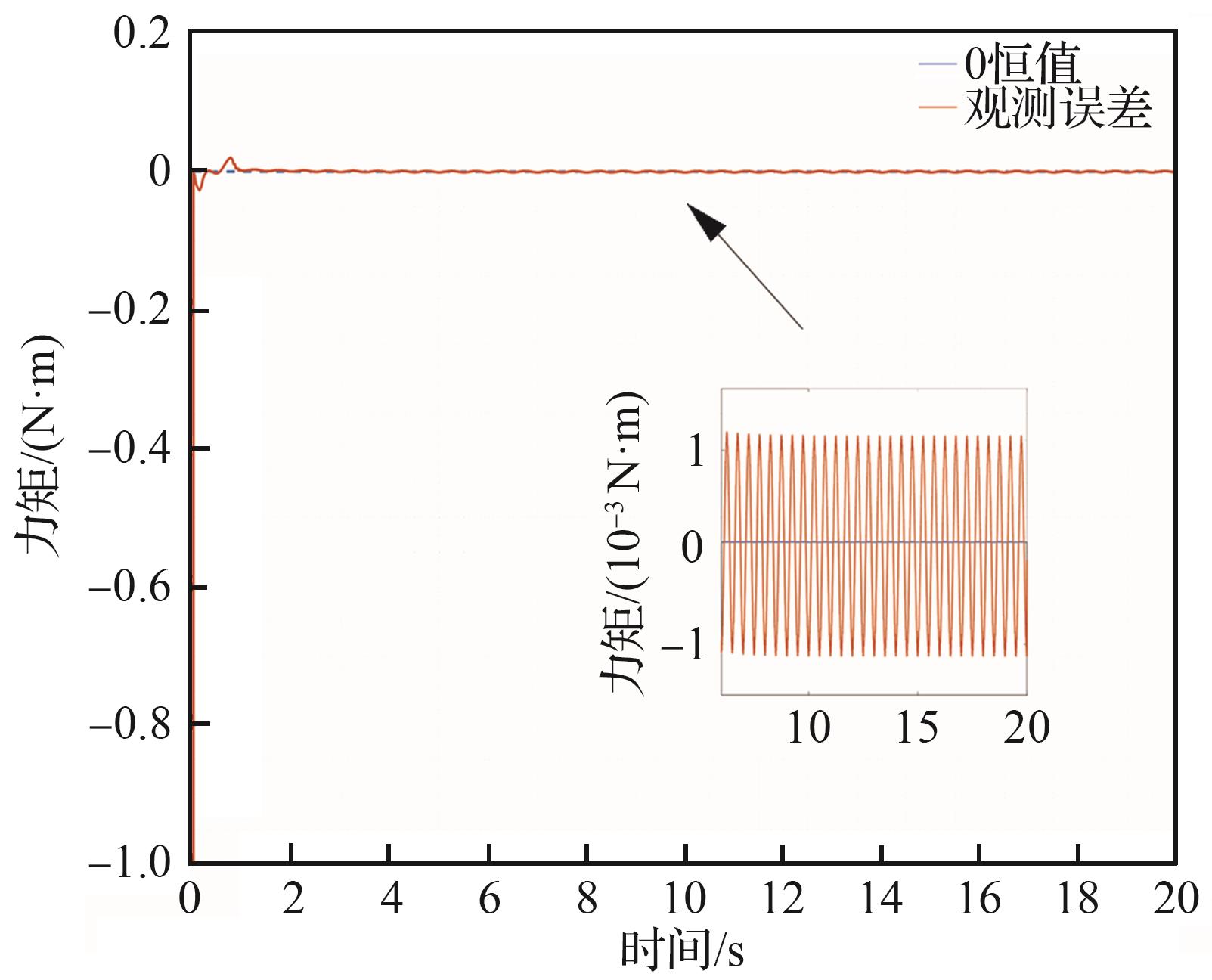
Fig.9
Observation error at a frequency of 1 Hz
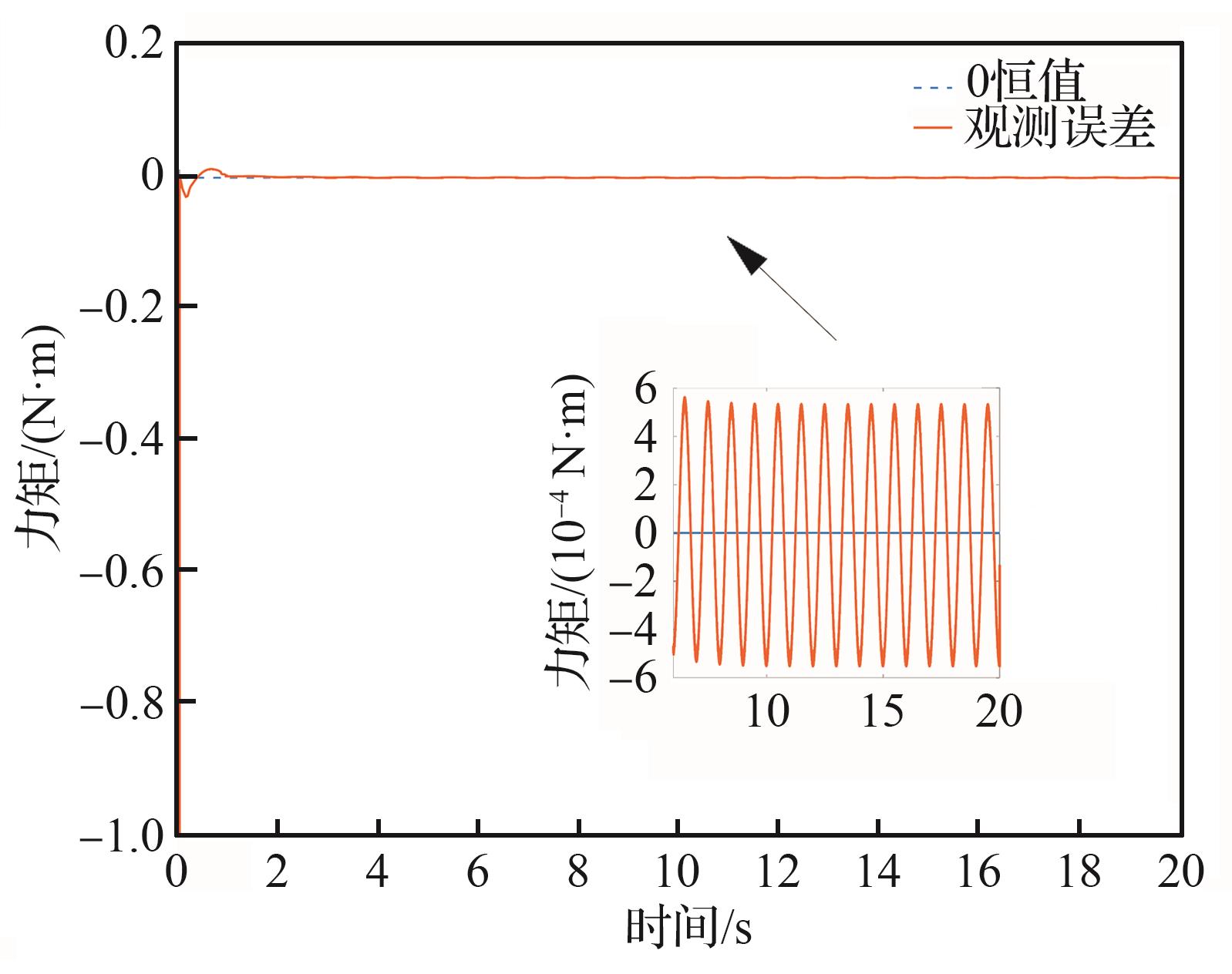
Fig.10
Difference between observed and true values at a frequency of 2 Hz
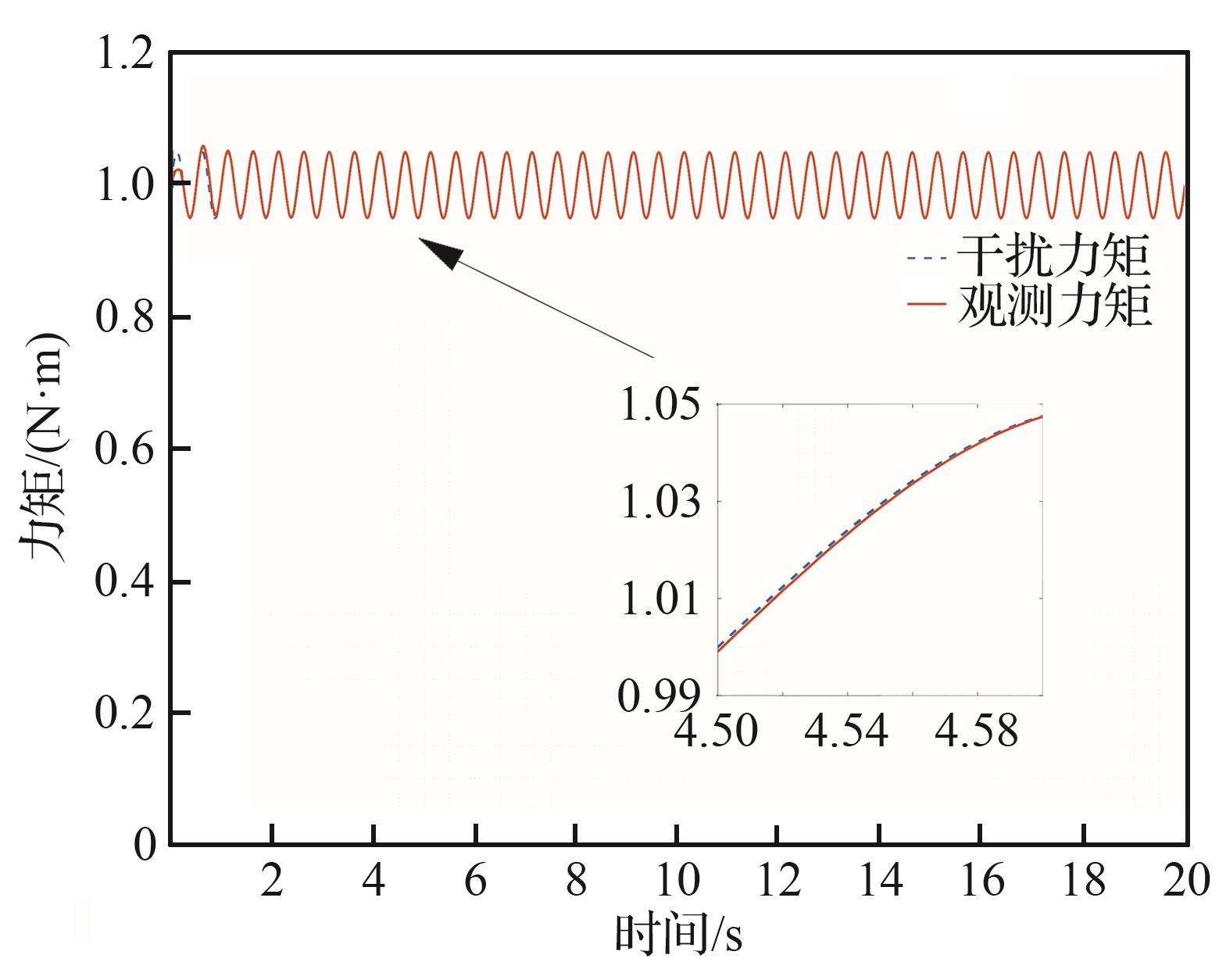
Fig.11
Observation error at a frequency of 2 Hz
| 1 | 李海涛, 林杰, 韩邦成. 基于ESO的DGVSCMG双框架伺服系统不匹配扰动抑制[J]. 航空学报, 2018, 39(4): 421641. |
| LI H T, LIN J, HAN B C. Mismatched disturbance rejection of double gimbal servo system in variable speed control moment gyroscope using a novel ESO method[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(4): 421641 (in Chinese). | |
| 2 | PECHEV A N. Feedback-based steering law for control moment gyros[J]. Journal of guidance, control, and dynamics, 2007, 30(3): 848-855. |
| 3 | LAI L, WEI W S, LI G, et al. Design of gimbal control system for miniature control moment gyroscope[C]∥ 2018 Chinese Automation Congress (CAC). Piscataway: IEEE Press, 2018: 3529-3533. |
| 4 | 黄首清, 刘守文, 翟百臣, 等. 基于综合应力工作态试验和神经网络的CMG失效边界域预测[J]. 航空学报, 2021, 42(4): 524208. |
| HUANG S Q, LIU S W, ZHAI B C, et al. Prediction of CMG failure boundary domain based on combined stress test and neural network[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(4): 524208 (in Chinese). | |
| 5 | LU M, SU N, ZHAO W H, et al. Research on dynamics and control strategy for flexible mounting control moment gyroscope[C]∥ 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). Piscataway: IEEE Press, 2019: 412-417. |
| 6 | ZHANG Y, ZANG Y, LI M, et al. Active-passive integrated vibration control for control moment gyros and its application to satellites[J]. Journal of Sound Vibration, 2017, 394: 1-14. |
| 7 | ZHANG Y, LI M, SONG Z Y, et al. Design and analysis of a moment control unit for agile satellite with high attitude stability requirement[J]. Acta Astronautica, 2016, 122: 90-105. |
| 8 | TANG J Q, ZHANG M, CUI X, et al. Neural network sliding model control of radial translation for magnetically suspended rotor (MSR) in control moment gyro[J]. Actuators, 2023, 12(6): 217. |
| 9 | LEBEDEV E L, REPIN A O. Influence of kinematic layout of control moment gyros with ball-bearing supported rotors on the dynamics of heating their elements in vacuum[J]. Gyroscopy and Navigation, 2023, 14(2): 176-181. |
| 10 | PAN S, XU Z F, LU M, et al. The coupling analysis for the gimbal servo system of a control moment gyroscope considering the influence of a flexible vibration isolator[J]. ISA Transactions, 2023, 137: 601-614. |
| 11 | LU M, LI X, LI Y H. Attenuation of wide margin disturbance fluctuation in SGCMG gimbal servo system[C]∥ 2012 15th International Conference on Electrical Machines and Systems (ICEMS). Piscataway: IEEE Press, 2012: 1-4. |
| 12 | LI H T, NING X, HAN B C. Composite decoupling control of gimbal servo system in double-gimbaled variable speed CMG via disturbance observer[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(1): 312-320. |
| 13 | LI H T, ZHENG S Q, NING X. Precise control for gimbal system of double gimbal control moment gyro based on cascade extended state observer[J]. IEEE Transactions on Industrial Electronics, 2017, 64(6): 4653-4661. |
| 14 | LUNGU M H. Control of double gimbal control moment gyro systems using the backstepping control method and a nonlinear disturbance observer[J]. Acta Astronautica, 2021, 180: 639-649. |
| 15 | LEE J H, LEE J Y, OH H S. Satellite disturbance detection and rejection with control moment gyros[J]. Journal of Physics: Conference Series, 2021, 1780(1): 012027. |
| 16 | BHAT S P, BERNSTEIN D S. Geometric homogeneity with applications to finite-time stability[J]. Mathematics of Control, Signals and Systems, 2005, 17(2): 101-127. |
| 17 | DING S H, LI S H. Sliding mode control of spacecraft attitude with finite-time convergence[C]∥ 2006 6th World Congress on Intelligent Control and Automation. Piscataway: IEEE Press, 2006: 830-834. |
| 18 | LIN F N, XUE G M, LI S G, et al. Finite-time sliding mode fault-tolerant neural network control for nonstrict-feedback nonlinear systems[J]. Nonlinear Dynamics, 2023, 111(18): 17205-17227. |
| 19 | BRAHMI H, AMMAR B, KSIBI A, et al. Finite-time complete periodic synchronization of memristive neural networks with mixed delays[J]. Scientific Reports, 2023, 13: 12545. |
| 20 | GONG S Y, ZHENG M R, HU J, et al. Event-triggered cooperative control for high-order nonlinear multi-agent systems with finite-time consensus[J]. International Journal of Applied Mathematics and Computer Science, 2023, 33(3): 439-448. |
| 21 | WANG D W, YANG W, YANG J F, et al. Research on the vibration characteristics and performance optimization of the rotor-shaft system of an unbalanced permanent magnet synchronous motor[J]. Journal of Mechanical Science and Technology, 2023, 37(9): 4425-4439. |
| 22 | MORIMOTO S, TAKEDA Y, HIRASA T. Current phase control methods for permanent magnet synchronous motors[J]. IEEE Transactions on Power Electronics, 1990, 5(2): 133-139. |
| 23 | CHEN P J, PAN T H, CHEN S. Development of double closed-loop vector control using model predictive control for permanent magnet synchronous motor[J]. Journal of Control, Automation and Electrical Systems, 2021, 32(3): 774-785. |
| 24 | WANG X L, HONG Y G. Finite-time consensus for multi-agent networks with second-order agent dynamics[J]. IFAC Proceedings Volumes, 2008, 41(2): 15185-15190. |
| 25 | 崔凯鑫, 段广仁. 基于干扰观测器的一类组合航天器高阶全驱抗干扰控制[J]. 航空学报, 2024, 45(1): 628892. |
| CUI K X, DUAN G R. High-order fully actuated anti-disturbance control for a type of combined spacecraft based on disturbance observer[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628892 (in Chinese). | |
| 26 | BHAT S P, BERNSTEIN D S. Continuous finite-time stabilization of the translational and rotational double integrators[J]. IEEE Transactions on Automatic Control, 1998, 43(5): 678-682. |
| 27 | BHAT S P, BERNSTEIN D S. Finite-time stability of continuous autonomous systems[J]. SIAM Journal on Control and Optimization, 2000, 38(3): 751-766. |
| 28 | 王忠, 廖宇新, 魏才盛, 等. 高超声速飞行器快速终端滑模保性能容错控制[J]. 航空学报, 2023, 44(24): 328476. |
| WANG Z S, LIAO Y X, WEI C S, et al. Fast terminal sliding mode fault-tolerant control of hypersonic vehicle with guaranteed performance[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(24): 328476 (in Chinese). |
| [1] | Mou CHEN, Zhengguo HUANG, Yaohua SHEN, Fan LIU. Overview of composite anti-disturbance control technology of advanced vehicles [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531303-531303. |
| [2] | Qi ZHU, Jingping SHI, Yiwei ZHANG, Xiaobo QU, Yongxi LYU. A high-precision transition trajectory optimization and control method for shipborne VTOL aircraft [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 532155-532155. |
| [3] | Mingqing LU, Fei LIAO, Fukui GAO, Beibei XING, Shichong WU, Zhaolin FAN, Yumin SU, Wenhua WU. Nonlinear disturbance observer enhanced adaptive backstepping tracking control for coaxial HAUV [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(23): 330361-330361. |
| [4] | Kaixin CUI, Guangren DUAN. High⁃order fully actuated anti⁃disturbance control for a type of combined spacecraft based on disturbance observer [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 628892-628892. |
| [5] | Zhongsen WANG, Yuxin LIAO, Caisheng WEI, Ting DAI. Fast terminal sliding mode fault⁃tolerant control of hypersonic vehicle with guaranteed performance [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(24): 328476-328476. |
| [6] | Yifang FU, Xinyue HU, Yulu HUANG, Ban WANG, Jiangtao HUANG. A binocular vision⁃based autonomous aerial docking system design for UAVs [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 628884-628884. |
| [7] | Haolan CHEN, Peng WANG, Guojian TANG. Attitude control scheme for morphing vehicles with output error constraints and input saturation [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528762-528762. |
| [8] | HU Wei, WAN Wenzhang, CHEN Mou. Neural network and disturbance observer based control for automatic carrier landing of UAV [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(S1): 726963-726963. |
| [9] | GUO Hongzhen, CHEN Mou. Safety formation control of quadrotor UAVs based on prescribed performance [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(8): 525789-525789. |
| [10] | LU Yao. Backstepping control for hypersonic flight vehicles based on tracking differentiator [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 524737-524737. |
| [11] | LIU Jinglong, ZHANG Chongfeng, ZOU Huaiwu, LI Ning, WU Linna. On-orbit precise operation control method for flexible joint space robots based on disturbance observer [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(1): 523899-523899. |
| [12] | SHAO Shuyi, CHEN Mou, ZHAO Qijun. Discrete-time fault-tolerant control for quadrotor UAV based on disturbance observer [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S2): 724283-724283. |
| [13] | LI Yaping, WANG Fang, ZHOU Chao. Prescribed performance filter backstepping control of hypersonic vehicle with full state constraints [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(11): 623857-623857. |
| [14] | GUO Jianguo, LU Ningbo, ZHOU Jun. Fuzzy control of finite time attitude coupling in hypersonic vehicles [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(11): 623838-623838. |
| [15] | ZHANG Xiao, NI Ming, YU Xiang, GUO Lei. A novel estimation method for blade impairments of unmanned aerial vehicle [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(1): 323316-323316. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341