Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (24): 332062.doi: 10.7527/S1000-6893.2025.32062
• Electronics and Electrical Engineering and Control • Previous Articles
Zihan NAN1, Ruiyang ZHOU1, Yongliang WANG1, Dayu LIU2, Ming DONG3,4( ), Fanchen MENG1
), Fanchen MENG1
Received:2025-04-02
Revised:2025-05-13
Accepted:2025-07-09
Online:2025-07-31
Published:2025-07-18
Contact:
Ming DONG
E-mail:dongmingdmdm@sina.com
Supported by:CLC Number:
Zihan NAN, Ruiyang ZHOU, Yongliang WANG, Dayu LIU, Ming DONG, Fanchen MENG. A robust filtering autonomous navigation method based on interactive dynamic and static multi-models in denied environments[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(24): 332062.
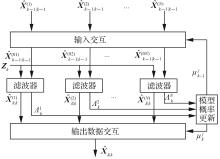
Fig.1
Principle of multi-model interactive filtering
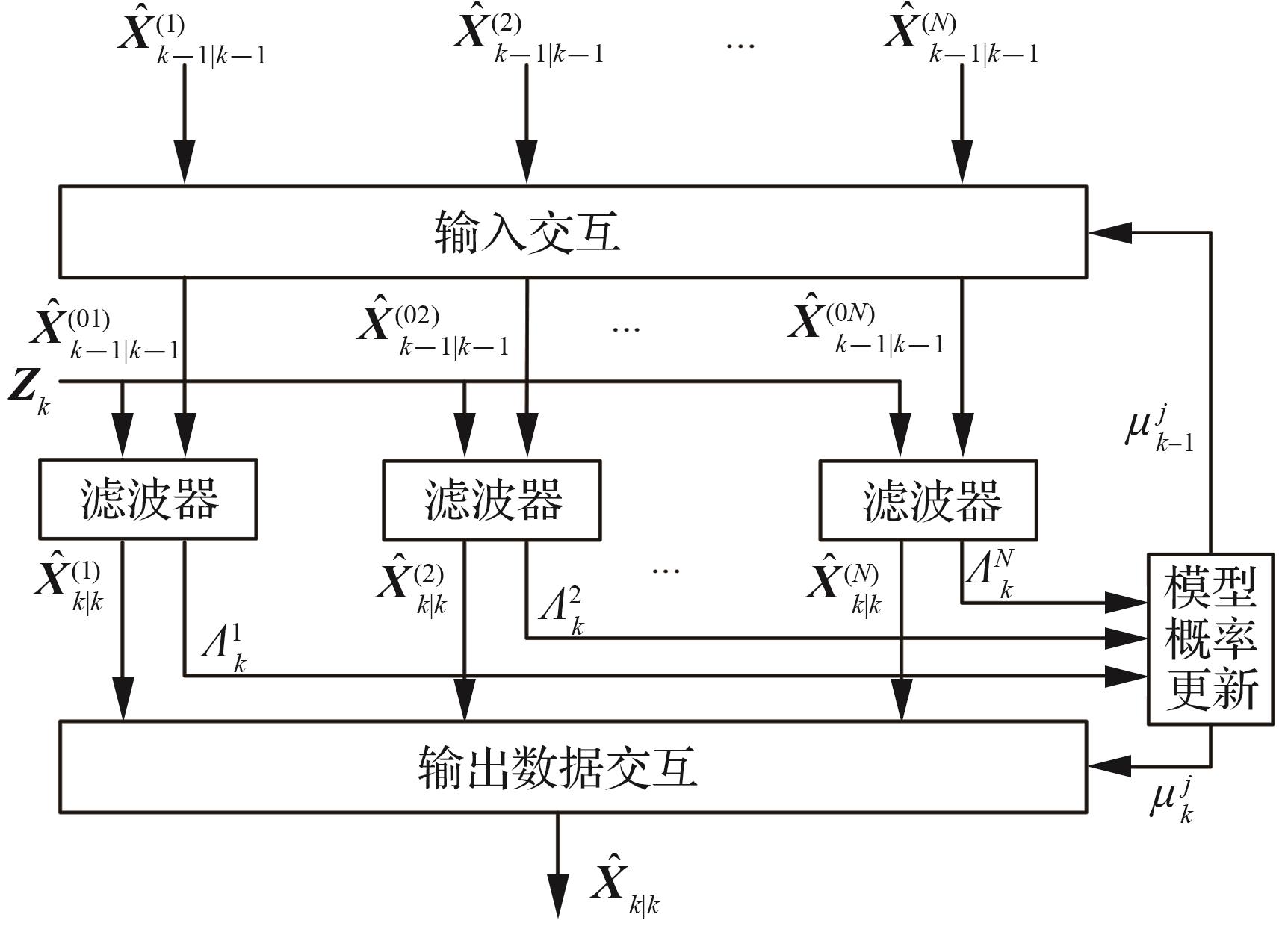
Fig.2
Schematic diagram of dynamic and static filters
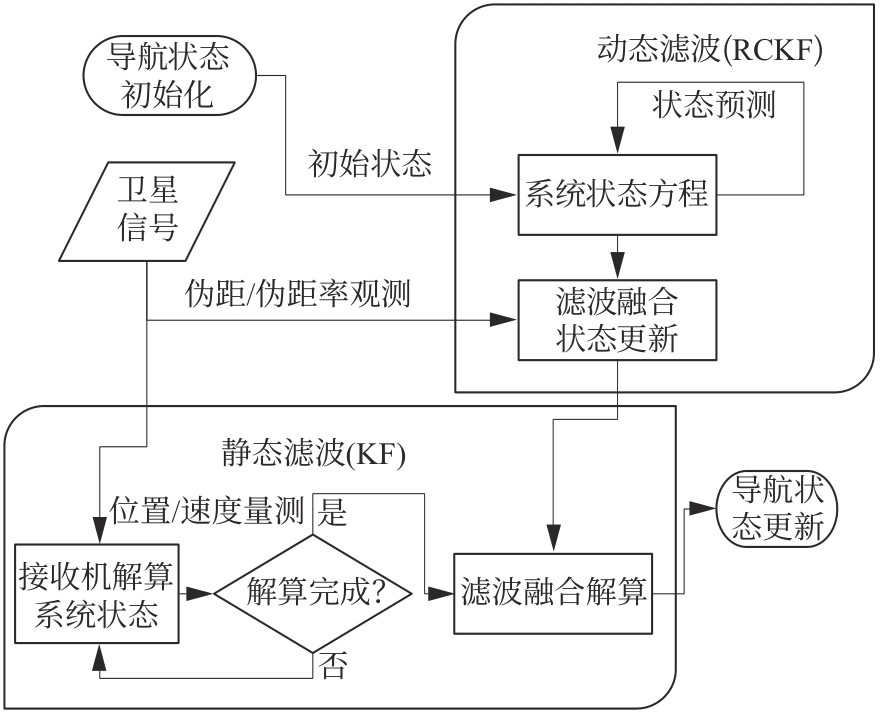

Fig.3
Schematic diagram of precision factor
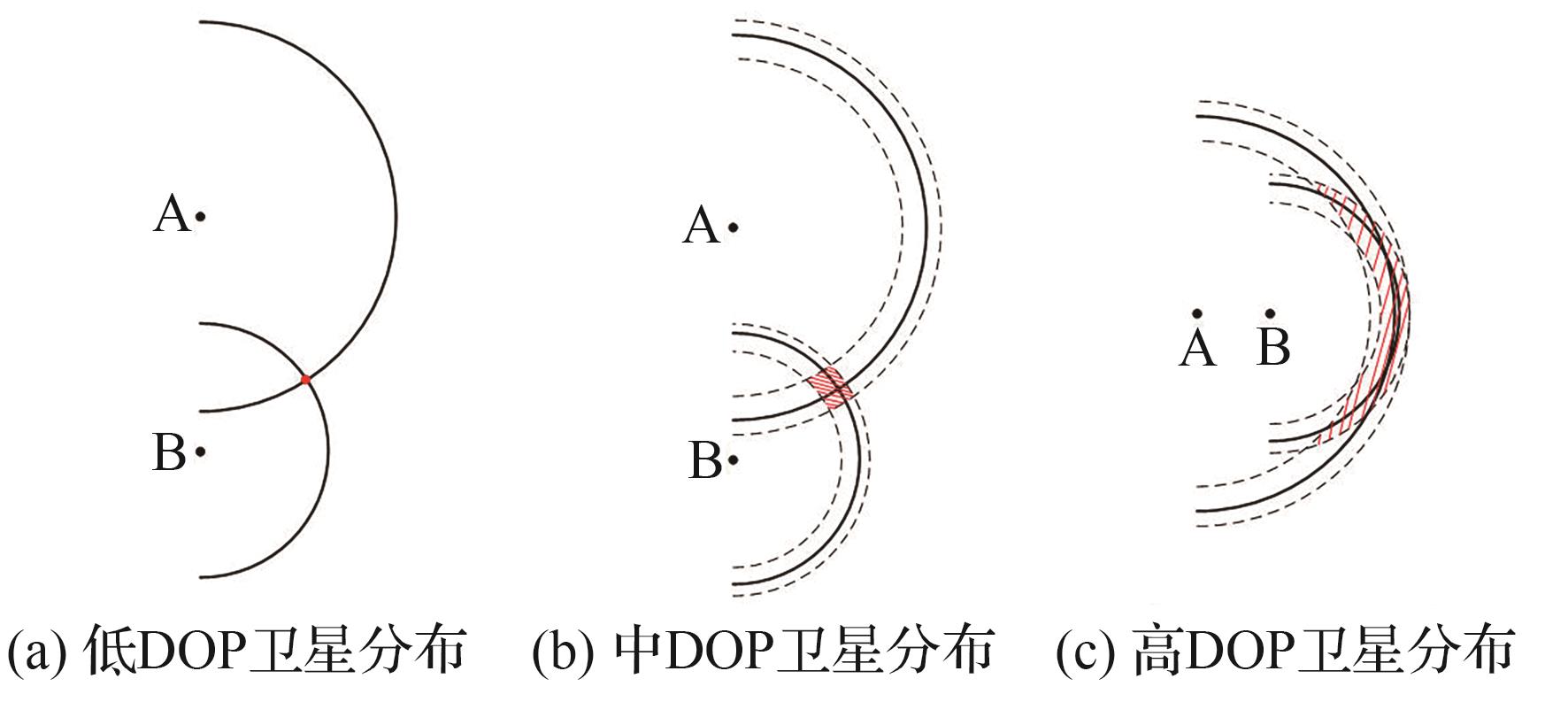
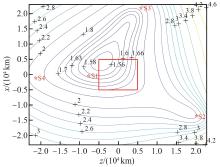
Fig.4
GDOP distribution under normal environment
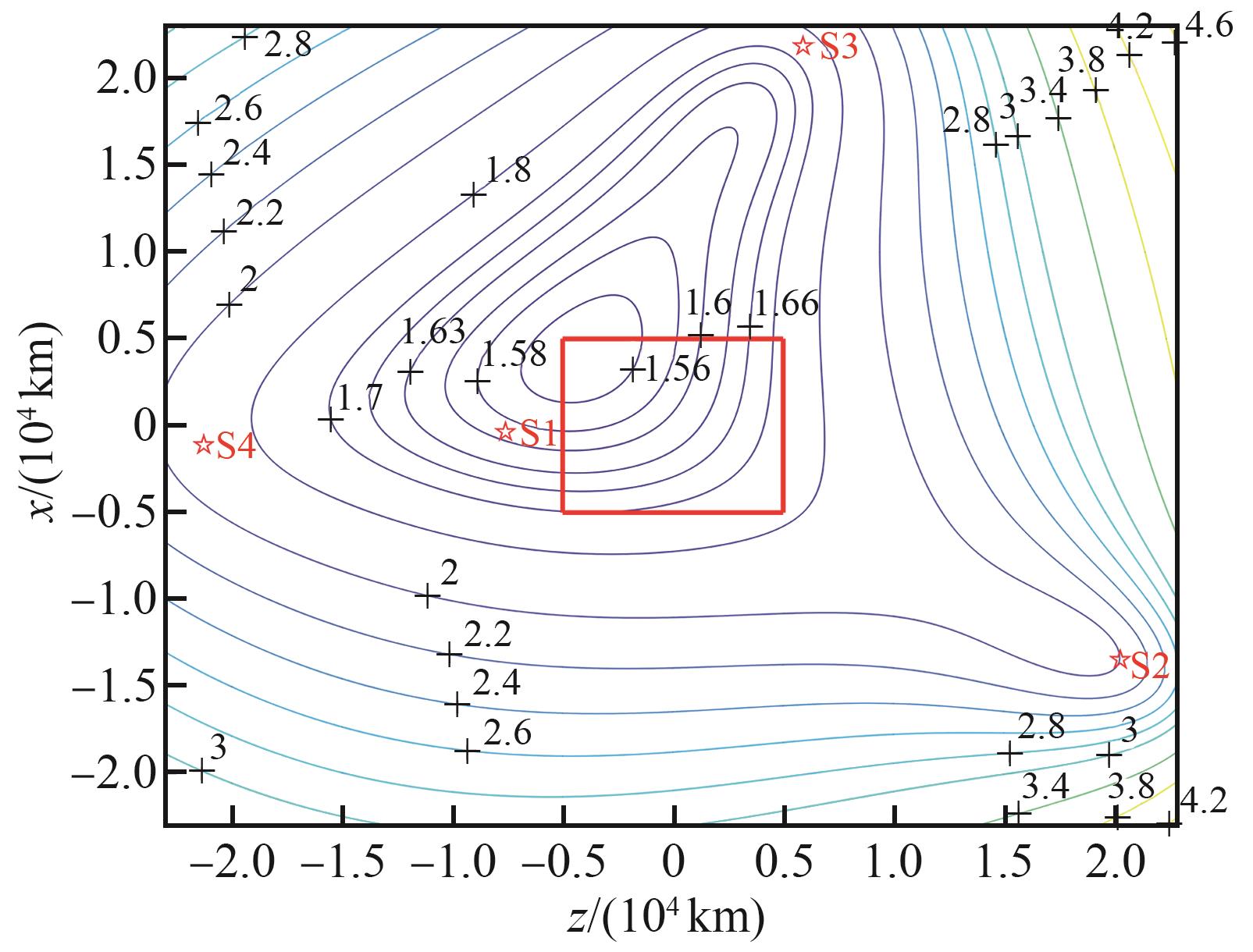
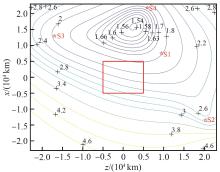
Fig.5
GDOP distribution after constellation change

Fig.6
Reference flight trajectory
Fig.7
Simulation rejection environment signal to interference ratio curve
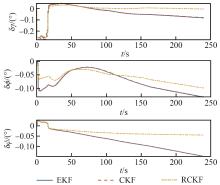
Fig.8
Attitude results of navigation under GNSS denied
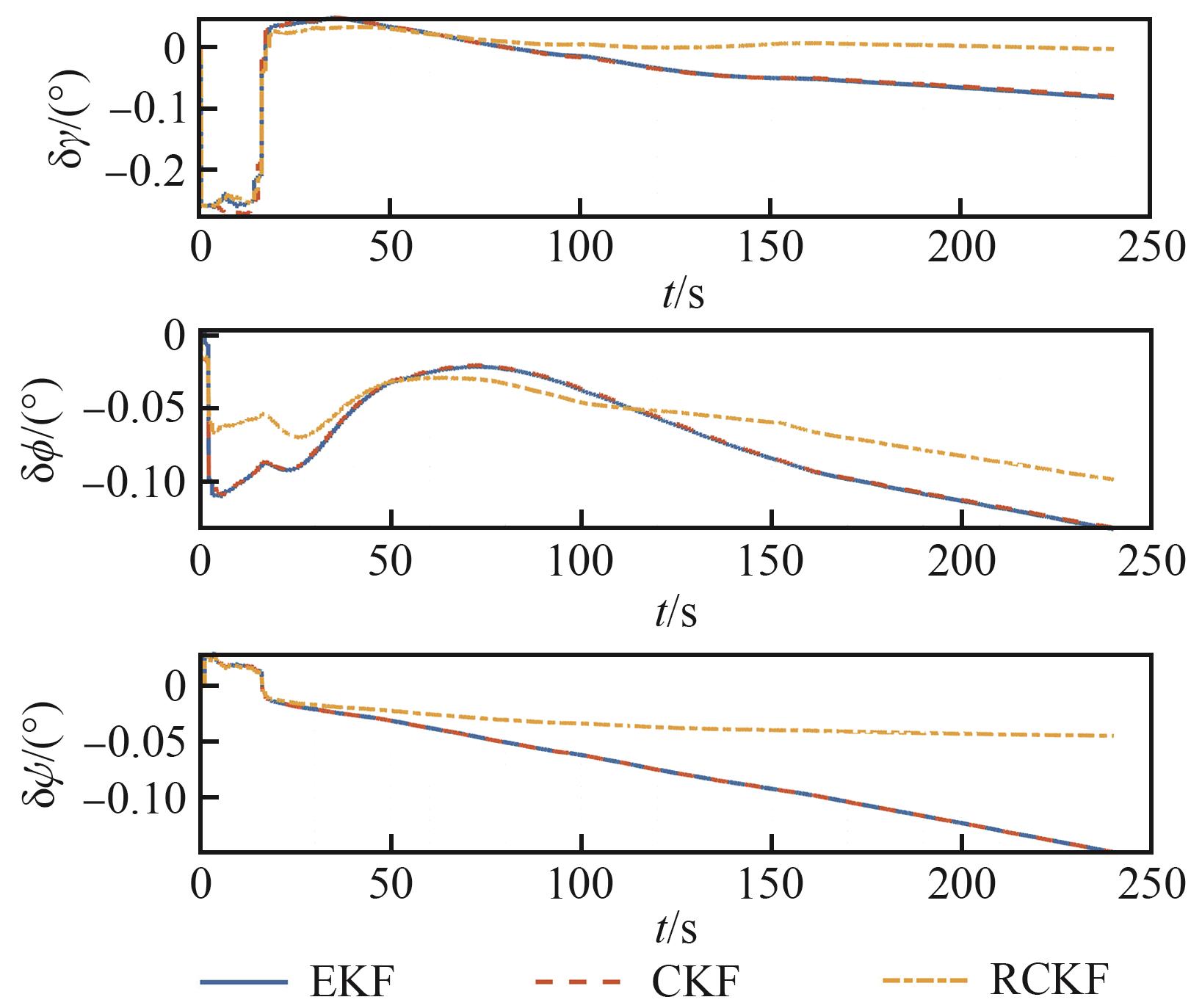
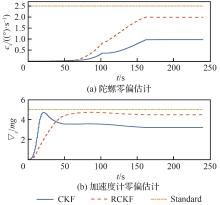
Fig.9
Inertial measurement unit error estimation results under GNSS denied
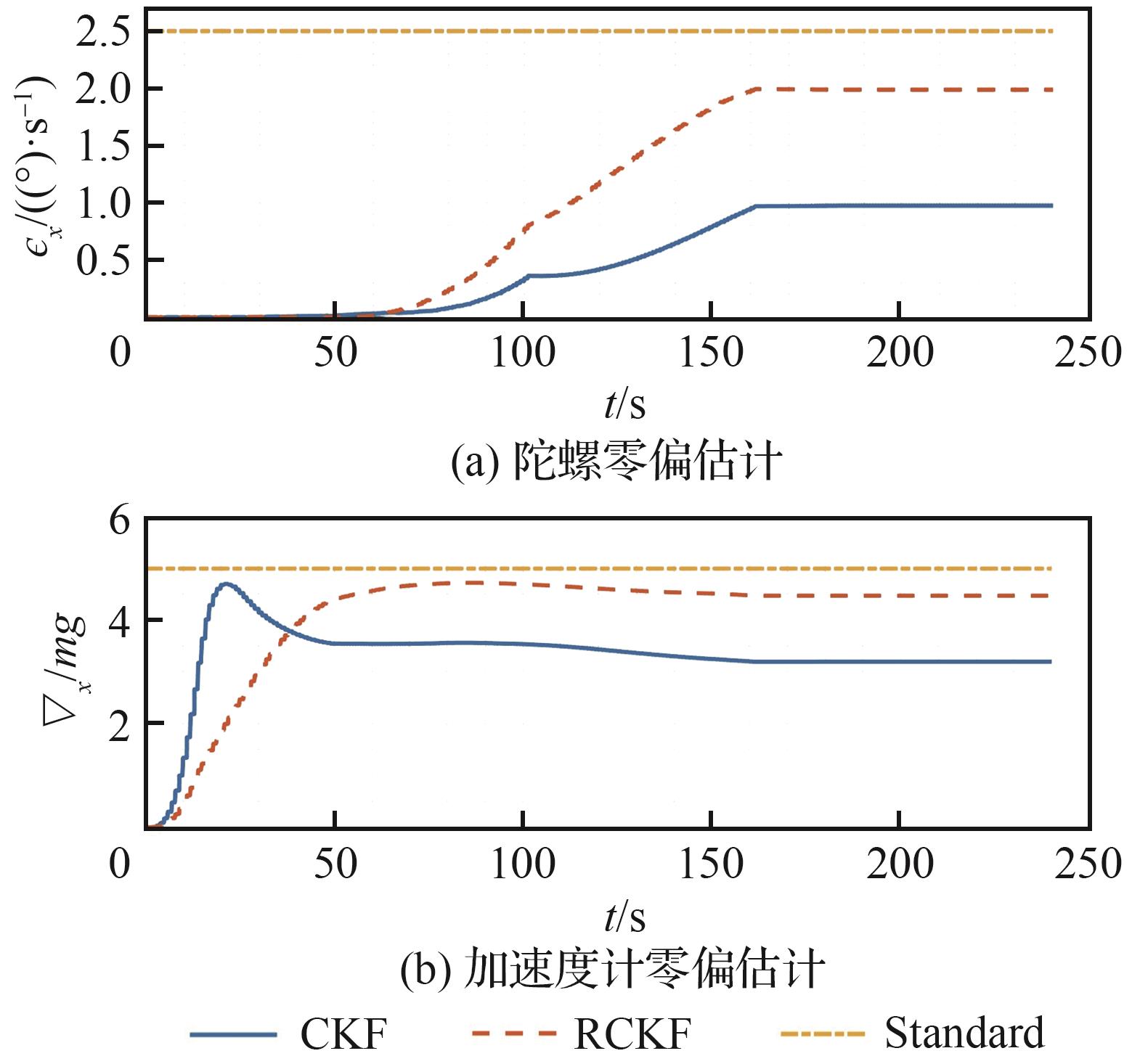
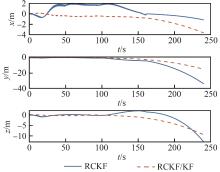
Fig.10
Multi-model filter position estimation error
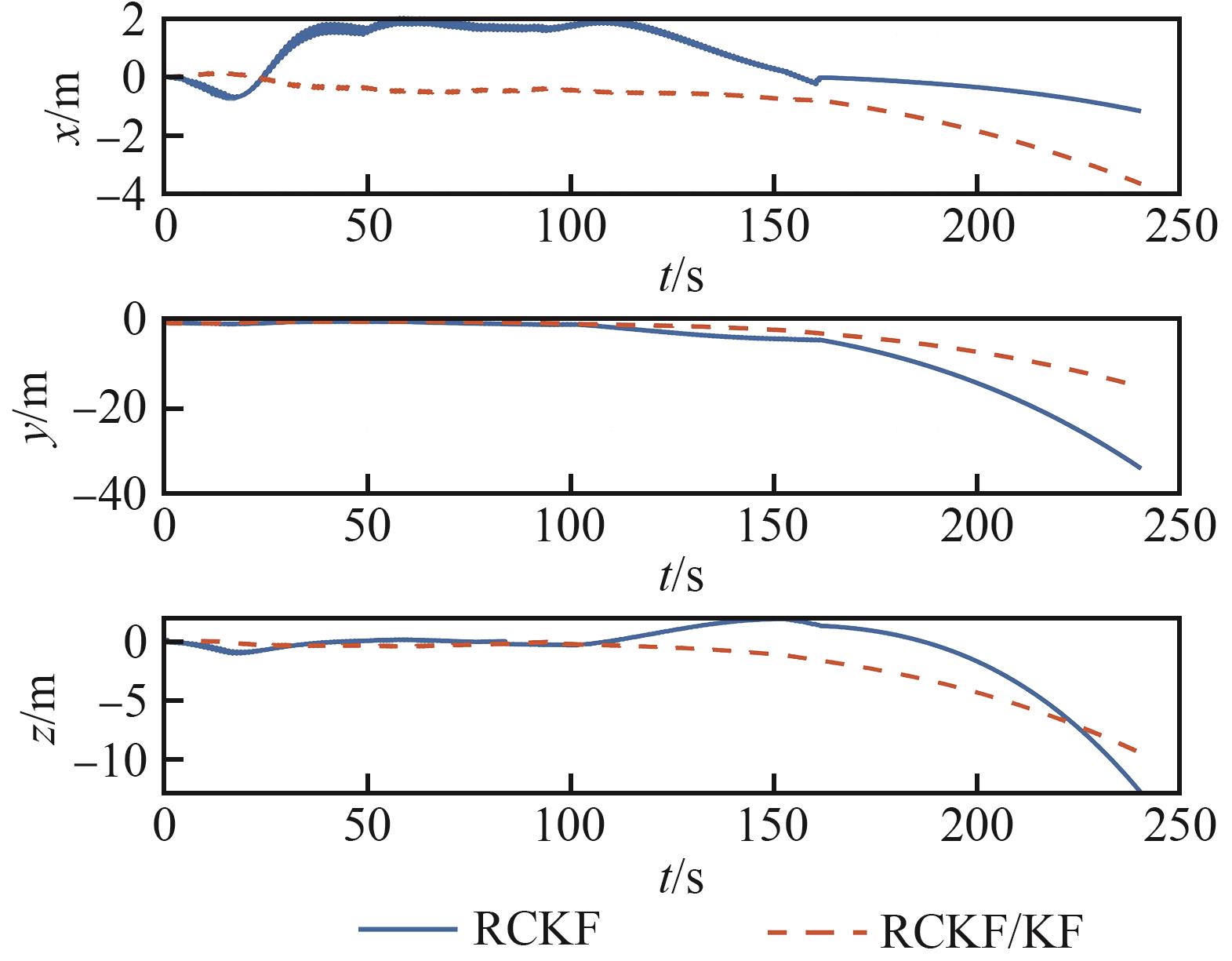
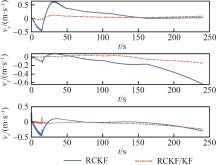
Fig.11
Multi model filter speed estimation error
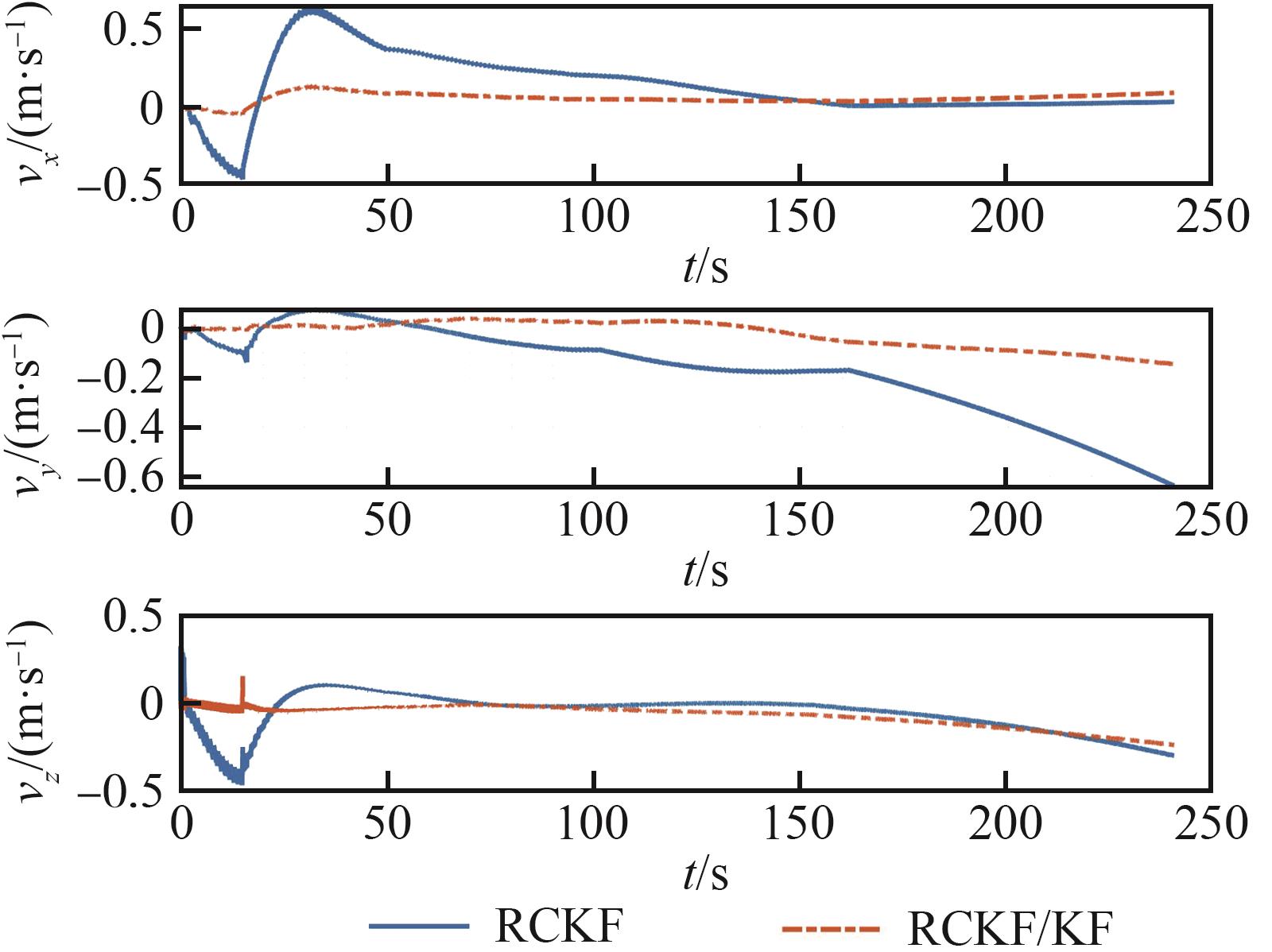
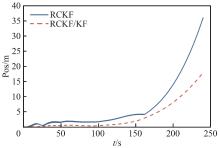
Fig.12
Optimization of positioning accuracy by multi-model filters
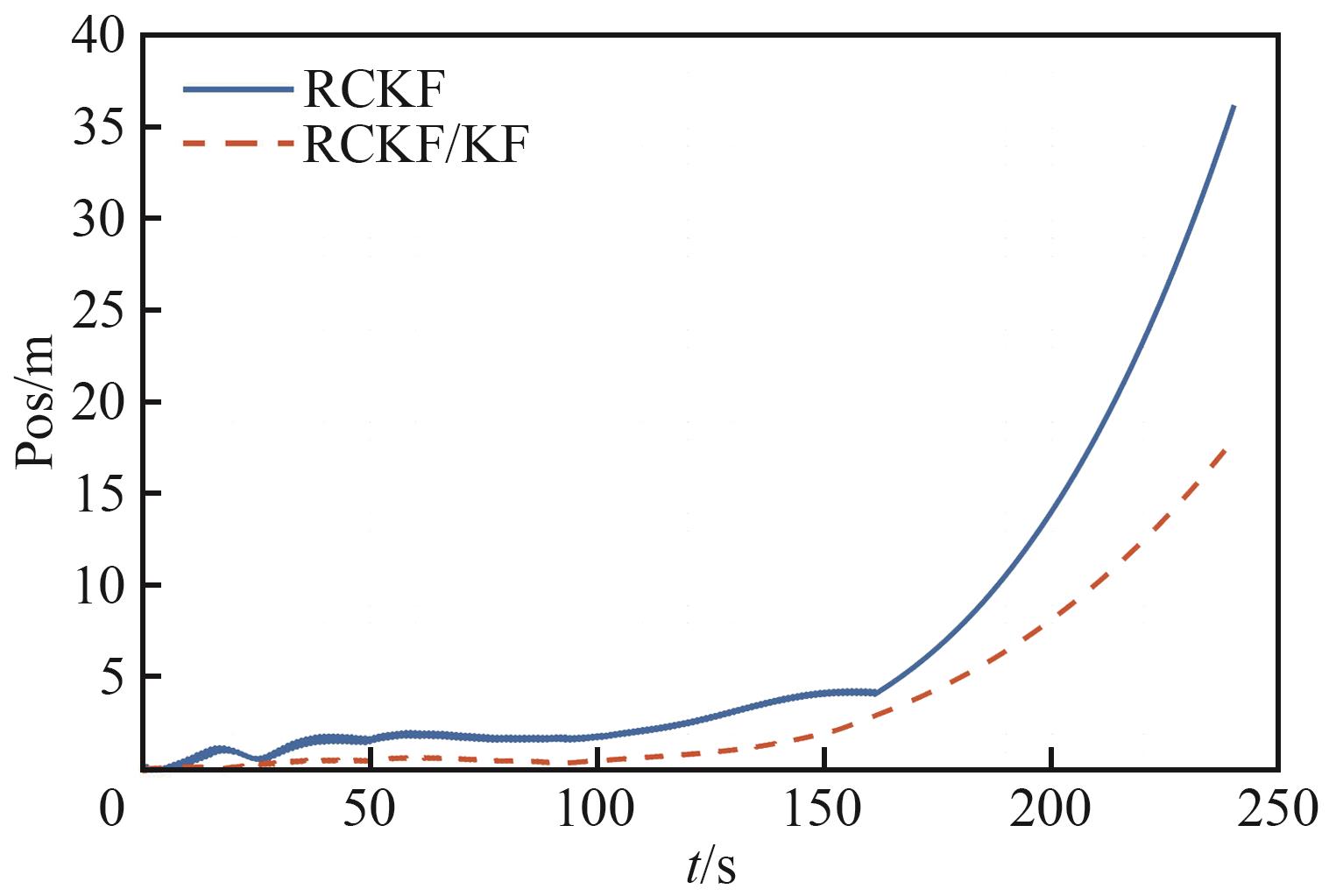
Fig.13
Multi-model filter attitude estimation error
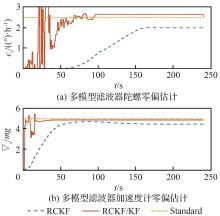
Fig.14
Error state results of multi model filter IMU
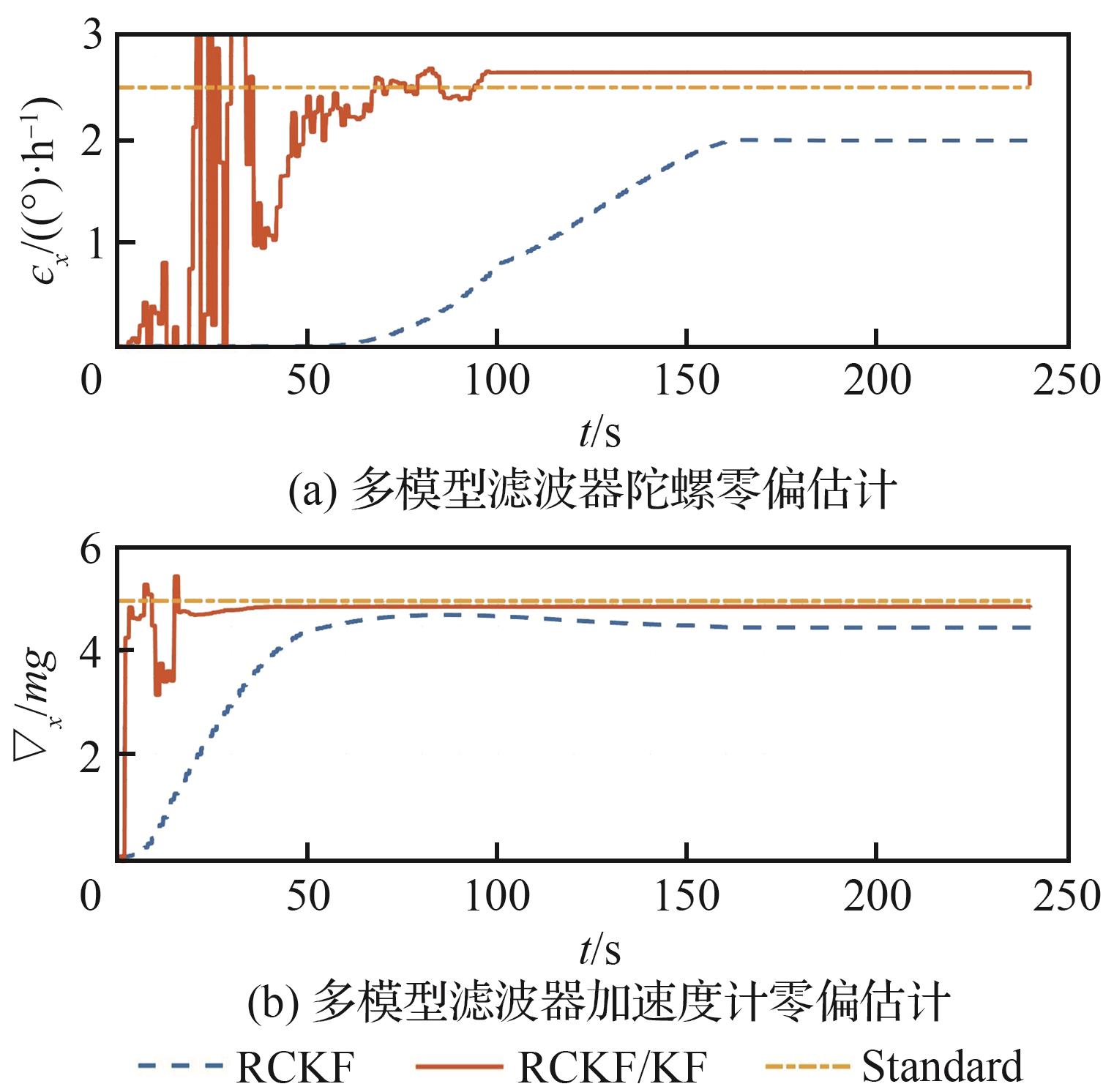
Table 1
RMSE statistics of simulation experiment
| 时间 | RCKF | RCKF/KF | ||
|---|---|---|---|---|
| 位置/m | 速度/(m·s-1) | 位置/m | 速度/(m·s-1) | |
| 中断前 | 2.55 | 0.35 | 1.67 | 0.15 |
| 0~60 s | 8.16 | 0.39 | 6.30 | 0.28 |
| 60~120 s | 19.86 | 1.61 | 17.02 | 1.43 |
Fig.15
Position estimation error of different multi-model methods
Table 2
Performance of embedded real-time test platform
| 性能 | 型号 | |
|---|---|---|
| RK3588S | Orin Nano | |
| CPU | 4-core ARM Cortex-A76+4-core ARM Cortex-A55 | 6-core ARM Cortex A78AE |
| 主频/GHz | 2.4 | 1.7 |
| 算力/TOPS | 6 | 67 |
| 单次迭代耗时(20次平均)/ms | 2.155 | 1.771 |
| [1] | 郭树人, 姜坤, 李星, 等. PNT体系视角下卫星导航与不依赖卫星导航技术融合发展研究[J]. 中国工程科学, 2023, 25(2): 50-58. |
| GUO S R, JIANG K, LI X, et al. Integrated development of satellite and satellite-independent navigation technologies from the perspective of PNT system[J]. Strategic Study of CAE, 2023, 25(2): 50-58 (in Chinese). | |
| [2] | 王巍, 孟凡琛, 阚宝玺. 国家综合PNT体系下的多源自主导航系统技术[J]. 导航与控制, 2022, 21(): 1-10. |
| WANG W, MENG F C, KAN B X. Multi-source autonomous navigation system technology under national comprehensive PNT system[J]. Navigation and Control, 2022, 21(Sup 1): 1-10 (in Chinese). | |
| [3] | 王巍, 陈巍, 孟凡琛. 面向多源自主导航的智能学习方法研究[J]. 中国科学: 信息科学, 2024, 54(12): 2778-2793. |
| WANG W, CHEN W, MENG F C. Study on intelligent learning methods for multi-source autonomous navigation[J]. Scientia Sinica (Informationis), 2024, 54(12): 2778-2793 (in Chinese). | |
| [4] | 杨元喜, 任夏, 贾小林, 等. 以北斗系统为核心的国家安全PNT体系发展趋势[J]. 中国科学: 地球科学, 2023, 53(5): 917-927. |
| YANG Y X, REN X, JIA X L, et al. Development trends of the national secure PNT system based on BDS[J]. Scientia Sinica (Terrae), 2023, 53(5): 917-927 (in Chinese). | |
| [5] | YE X Y, SONG F J, ZHANG Z Y, et al. A review of small UAV navigation system based on multisource sensor fusion[J]. IEEE Sensors Journal, 2023, 23(17): 18926-18948. |
| [6] | KIM K H, LEE J G, PARK C G. Adaptive two-stage extended Kalman filter for a fault-tolerant INS-GPS loosely coupled system[J]. IEEE Transactions on Aerospace and Electronic Systems, 2009, 45(1): 125-137. |
| [7] | FENG D Q, WANG C Q, HE C L, et al. Kalman-filter-based integration of IMU and UWB for high-accuracy indoor positioning and navigation[J]. IEEE Internet of Things Journal, 2020, 7(4): 3133-3146. |
| [8] | KIM J, CHENG J T, GUIVANT J, et al. Compressed fusion of GNSS and inertial navigation with simultaneous localization and mapping[J]. IEEE Aerospace and Electronic Systems Magazine, 2017, 32(8): 22-36. |
| [9] | RONG LI X, JILKOV V P. Survey of maneuvering target tracking. PartⅠ. Dynamic models[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1333-1364. |
| [10] | BAR-SHALOM Y, LI X R, KIRUBARAJAN T. Estimation with applications to tracking and navigation: Theory, algorithms and software[M]. New York: John Wiley & Sons, 2002: 121-177. |
| [11] | 王磊, 程向红, 李双喜, 等. 自适应交互式多模型AUV组合导航算法[J]. 中国惯性技术学报, 2016, 24(4): 511-516. |
| WANG L, CHENG X H, LI S X, et al. Adaptive interacting multiple model filter for AUV integrated navigation[J]. Journal of Chinese Inertial Technology, 2016, 24(4): 511-516 (in Chinese). | |
| [12] | 赖际舟, 柳敏, 李志敏, 等. 基于有色噪声自回归建模的惯性/卫星交互多模型滤波导航算法[J]. 导航定位与授时, 2015, 2(6): 19-24. |
| LAI J Z, LIU M, LI Z M, et al. Interacting multiple model filter algorithm of the inertial/GPS integrated system based on the colored noise regression modeling[J]. Navigation Positioning and Timing, 2015, 2(6): 19-24 (in Chinese). | |
| [13] | JO K, CHU K, SUNWOO M. Interacting multiple model filter-based sensor fusion of GPS with in-vehicle sensors for real-time vehicle positioning[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 329-343. |
| [14] | LIU X H, LIU X X, ZHANG W G, et al. Interacting multiple model UAV navigation algorithm based on a robust cubature Kalman filter[J]. IEEE Access, 2020, 8: 81034-81044. |
| [15] | 王巍, 孟凡琛, 徐小明, 等. 融合载体动力学特征的智能多源自主导航方法研究[J]. 宇航学报, 2024, 45(4): 550-559. |
| WANG W, MENG F C, XU X M, et al. Research on intelligent multi-source autonomous navigation method integrating carrier dynamics characteristics[J]. Journal of Astronautics, 2024, 45(4): 550-559 (in Chinese). | |
| [16] | CUI B B, WEI X H, CHEN X Y, et al. Performance enhancement of robust cubature Kalman filter for GNSS/INS based on Gaussian process quadrature[J]. IEEE Access, 2020, 8: 25596-25604. |
| [17] | LI S P, WANG P, MU R J, et al. Augmented robust cubature Kalman filter applied in re-entry vehicle tracking[C]∥2021 IEEE Aerospace Conference. Piscataway: IEEE Press, 2021. |
| [18] | 南子寒, 刘大禹, 董明, 等. GNSS拒止下多源自主导航鲁棒滤波方法[J]. 航空学报, 2024, 45(): 730782. |
| NAN Z H, LIU D Y, DONG M, et al. Robust filtering method for GNSS denied multi-source autonomous navigation[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(Sup 1): 730782 (in Chinese). | |
| [19] | 南子寒, 刘大禹, 苏牡丹, 等. 拒止环境下基于LSTM神经网络的自主导航方法[J]. 中国惯性技术学报, 2025, 33(4): 331-339, 349. |
| NAN Z H, LIU D Y, SU M D, et al. Autonomous navigation method based on LSTM neural network in denial environment[J]. Journal of Chinese Inertial Technology, 2025, 33(4): 331-339, 349 (in Chinese). | |
| [20] | SUN W, LIU J Z. RCKF cooperative navigation algorithm for tightly coupled vehicle ad hoc networks based on Huber M estimation[J]. IEEE Access, 2021, 9: 139888-139895. |
| [21] | ZHAO S Y, AHN C K, SHI P, et al. Bayesian state estimation for Markovian jump systems: Employing recursive steps and pseudocodes[J]. IEEE Systems, Man, and Cybernetics Magazine, 2019, 5(2): 27-36. |
| [22] | 王健, 周立辉, 陈家福, 等. 基于交互多模型的时变平滑变结构滤波算法[J]. 航空学报, 2024, 45(21): 330167. |
| WANG J, ZHOU L H, CHEN J F, et al. Time-varying smooth variable structure filter based on interactive multi-model[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(21): 330167 (in Chinese). | |
| [23] | 赵靖, 宋丹. 无人机GNSS/IMU组合导航系统完好性监测方法[J]. 航空学报, 2024, 45(7): 328943. |
| ZHAO J, SONG D. Integrity monitoring method for GNSS/IMU integrated navigation system of UAV[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(7): 328943 (in Chinese). | |
| [24] | 张且且, 方乐, 赖际舟, 等. 基于加权最小GDOP值的快速选星算法[J]. 宇航学报, 2025, 46(1): 108-116. |
| ZHANG Q Q, FANG L, LAI J Z, et al. A fast satellite selection algorithm based on weighted minimum GDOP[J]. Journal of Astronautics, 2025, 46(1): 108-116 (in Chinese). | |
| [25] | 张召友, 郝燕玲, 吴旭. 3种确定性采样非线性滤波算法的复杂度分析[J]. 哈尔滨工业大学学报, 2013, 45(12): 111-115. |
| ZHANG Z Y, HAO Y L, WU X. Complexity analysis of three deterministic sampling nonlinear filtering algorithms[J]. Journal of Harbin Institute of Technology, 2013, 45(12): 111-115 (in Chinese). | |
| [26] | 王巍, 邢朝洋, 冯文帅. 自主导航技术发展现状与趋势[J]. 航空学报, 2021, 42(11): 525049. |
| WANG W, XING C Y, FENG W S. State of the art and perspectives of autonomous navigation technology[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(11): 525049 (in Chinese). |
| [1] | Jianhua CHENG, Sixiang CHENG, Bing QI, Shilong FAN, Guojing ZHAO, Sicheng CHEN. PPP/INS integrated navigation performance analysis in ionospheric scintillation environment [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730676-730676. |
| [2] | Zihan NAN, Dayu LIU, Ming DONG, Wenning LIANG, Xuewei ZHAO, Yilin MA, Yao GUAN. Robust filtering method for GNSS denied multi-source autonomous navigation [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730782-730782. |
| [3] | Kun LI, Shuhui BU, Xuan JIA, Yifei DONG, Lin CHEN. Relative aircraft positioning based on inertial navigation and datalink [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(15): 329594-329594. |
| [4] | Shifeng ZHANG, Jun LI, Huabo YANG. Review of inertial guidance instrumental error separation techniques [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528590-528590. |
| [5] | DONG Xinhao, ZHOU Zhijie, HU Changhua, FENG Zhichao, CAO You. Performance evaluation method for inertial system based on hierarchical belief rule base [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(7): 324456-324456. |
| [6] | WANG Wei, XING Chaoyang, FENG Wenshuai. State of the art and perspectives of autonomous navigation technology [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 525049-525049. |
| [7] | LIANG Shuai, YANG Lin, YANG Zhaoxu, XU Bin. Kalman filter based T-S fuzzy control for morphing aircraft [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S2): 724274-724274. |
| [8] | SONG Ningfang, YANG Yanqiang. Deep fusion navigation technology of missile-borne Stellar-INS with LFOV [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(8): 623674-623674. |
| [9] | YANG Zhaoxu, GUO Yi, LEI Tingwan, LI Rongbing. Air data fusion and estimation method for advanced aircrafts in post-stall maneuver [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(6): 523456-523456. |
| [10] | LU Hang, HAO Shunyi, PENG Zhiying, HUANG Guorong. Application of marginal reduced high-degree cubature Kalman filter to nonlinear rapid transfer alignment [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2019, 40(3): 322390-322390. |
| [11] | WANG Zhiwei, WANG Fengjie, DI Changchun, SHI Zhiyong, YANG Gongliu. Nonlinear alignment method for land SINS [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2018, 39(1): 321554-321554. |
| [12] | QIAN Chao, ZHANG Zijian, LI Dawei. On-line reliability assessment of platform inertial navigation system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2017, 38(9): 321259-321259. |
| [13] | ZENG Qinghua, PAN Pengju, LIU Jianye, WANG Yunshu, LIU Sheng. Fast and accurate target positioning with large viewpoint based on inertial navigation system information [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2017, 38(8): 321171-321171. |
| [14] | GUO Qi, ZHOU Zhaofa, SUN Lijiang, XU Zihao, CHEN He. Size parameters identification and rotation project design for single-axis rotary SINS [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2017, 38(10): 320841-320841. |
| [15] | WANG Guohong, LI Junjie, ZHANG Xiangyu, WU Wei. A tracking model for near space hypersonic slippage leap maneuvering target [J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(7): 2400-2410. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341