Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (17): 331654.doi: 10.7527/S1000-6893.2025.31654
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Honglin LIU1, Guan WANG1, Shuaibin AN1, Shaojie MA2, Kai LIU1,3( )
)
Received:2024-12-11
Revised:2025-04-07
Accepted:2025-05-08
Online:2025-06-03
Published:2025-05-27
Contact:
Kai LIU
E-mail:carsonliu@dlut.edu.cn
Supported by:CLC Number:
Honglin LIU, Guan WANG, Shuaibin AN, Shaojie MA, Kai LIU. Online identification based strong adaptive control of hypersonic morphing vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(17): 331654.
Fig.1
Structural sketch of HMV[9]

Fig.2
Scheme of strong adaptive control of hypersonic morphing aircraft based on online identification
Table 1
Body parameters of HMV
| 参数 | 符号 | 数值 |
|---|---|---|
| 机头长度/ | 3.43 | |
| 机身总长/ | 8.00 | |
| 水平翼机头距离/ | 4.70 | |
| 尾翼机头距离/ | 9.73 | |
| 机体直径/ | 1.14 | |
| 水平翼翼跟弦长/ | 2.12 | |
| 水平翼翼尖弦长/ | 0.92 | |
| 尾翼翼跟弦长/ | 1.70 | |
| 尾翼翼尖弦长/ | 0.85 | |
| 最小展长/ | 1.63 | |
| 最大展长/ | 2.55 | |
| 尾翼翼展/ | 0.91 | |
| 水平翼前缘后掠角/(°) | 60 | |
| 尾翼前缘后掠角/(°) | 51.86 | |
| 未变形参考面积/ | 5.66 | |
| 纵向特征长度/ | 1.148 | |
| 飞机总质量/ | 5 000 | |
| 机翼质量/ | 100 | |
| 绕机身 | 150 646 |
Table 2
Initial condition and main controller setting
| 参数 | 符号 | 数值 |
|---|---|---|
| 初始高度/ | 35.5 | |
| 初始速度/( | 2 936.36 | |
| 初始变形率 | 0 | |
| 初始攻角/(°) | 5.91 | |
| 初始俯仰角/(°) | 5.91 | |
| 初始燃油当量比 | 0.05 | |
| 初始升降舵偏角/(°) | 0.86 | |
| Critic网络学习率 | 0.02 | |
| Actor网络学习率 | 0.02 | |
| 速度误差反馈增益 | 1.5 | |
| 俯仰角速度误差反馈增益 | 6.5 |

Fig.3
Tracking performances of HMV flight mission

Fig.4
Disturbance observation simulation results
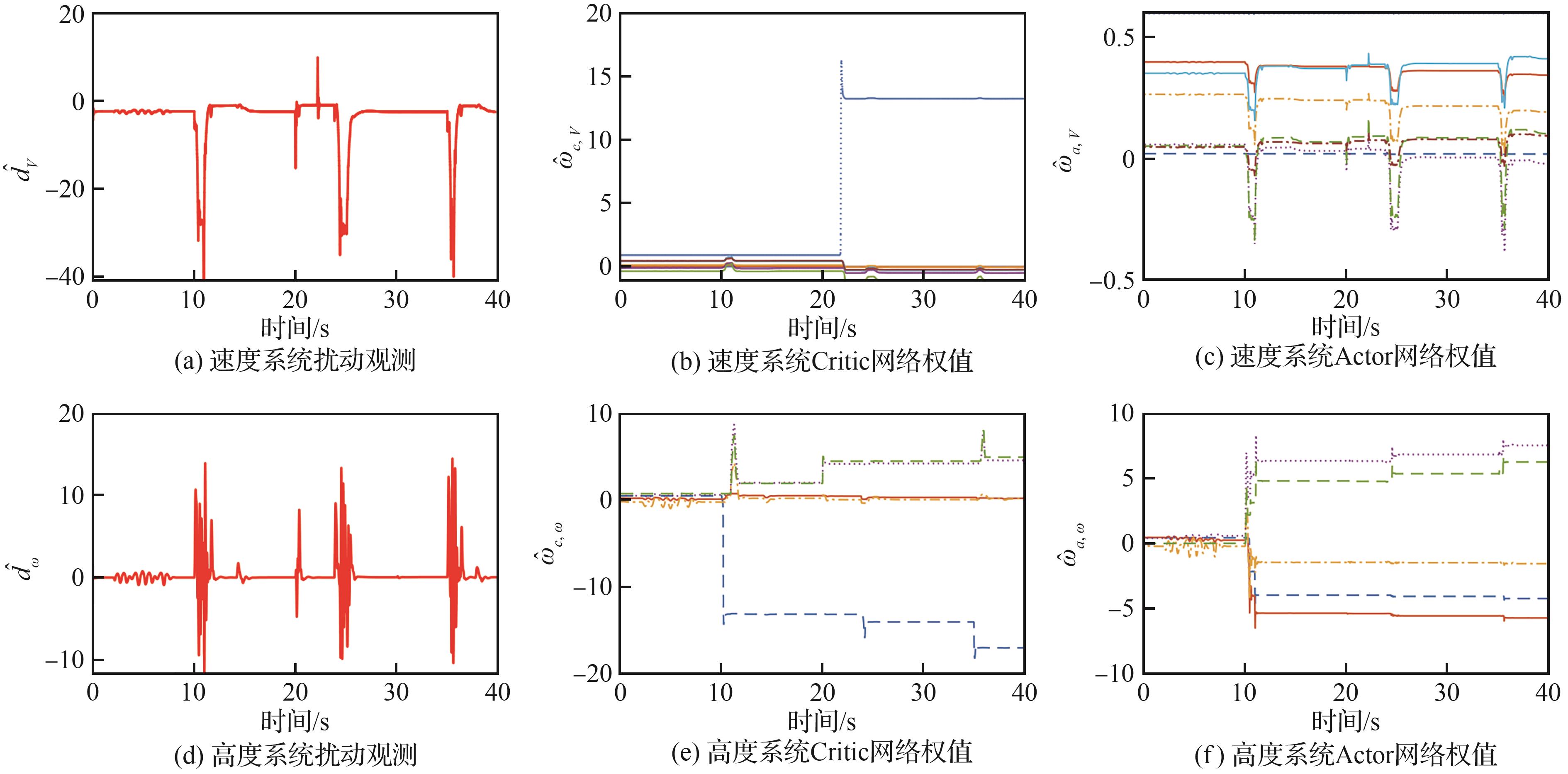

Fig.5
Hardware-in-the-loop system
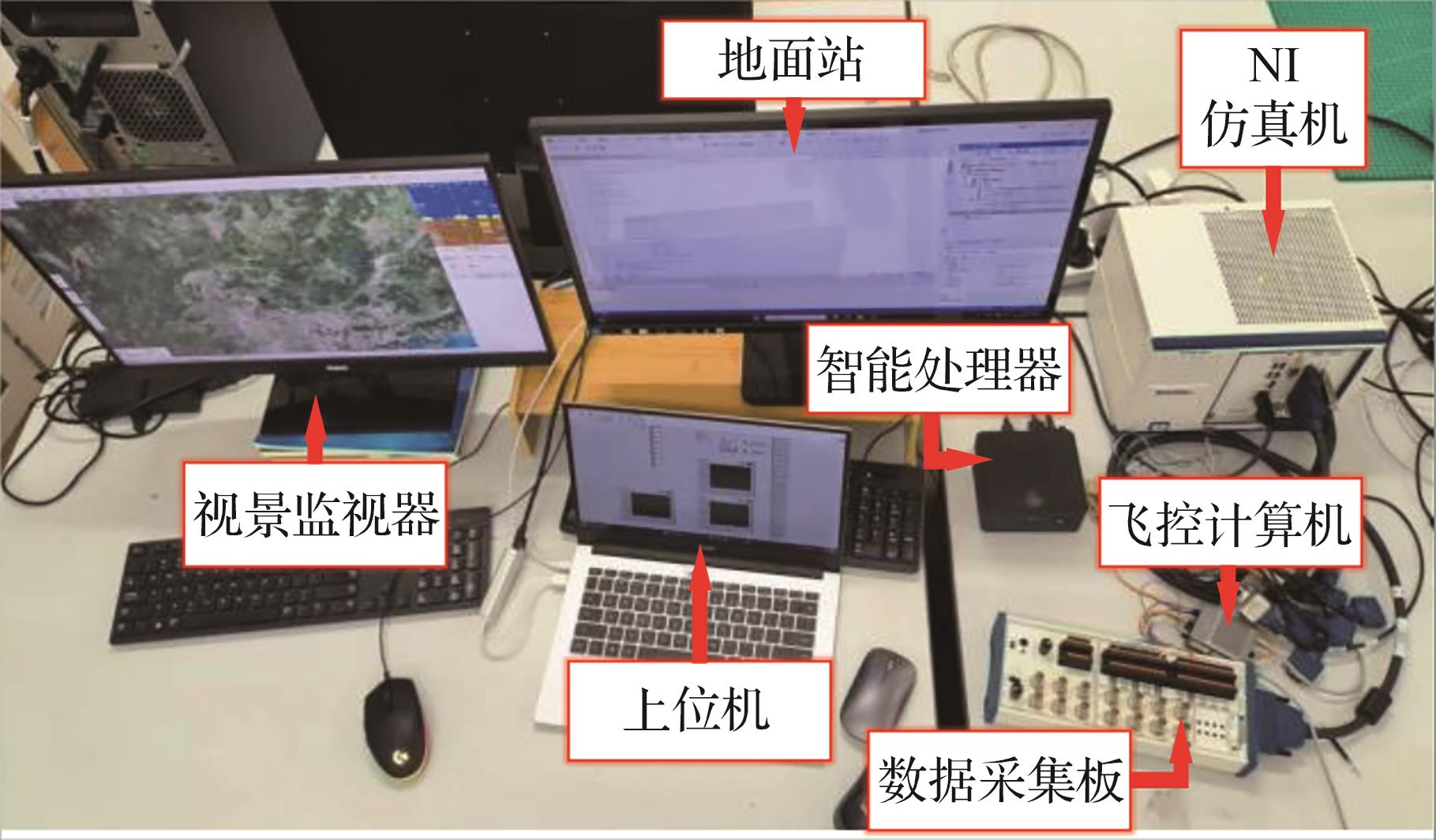
Fig.6
Hardware-in-the-loop simulation results
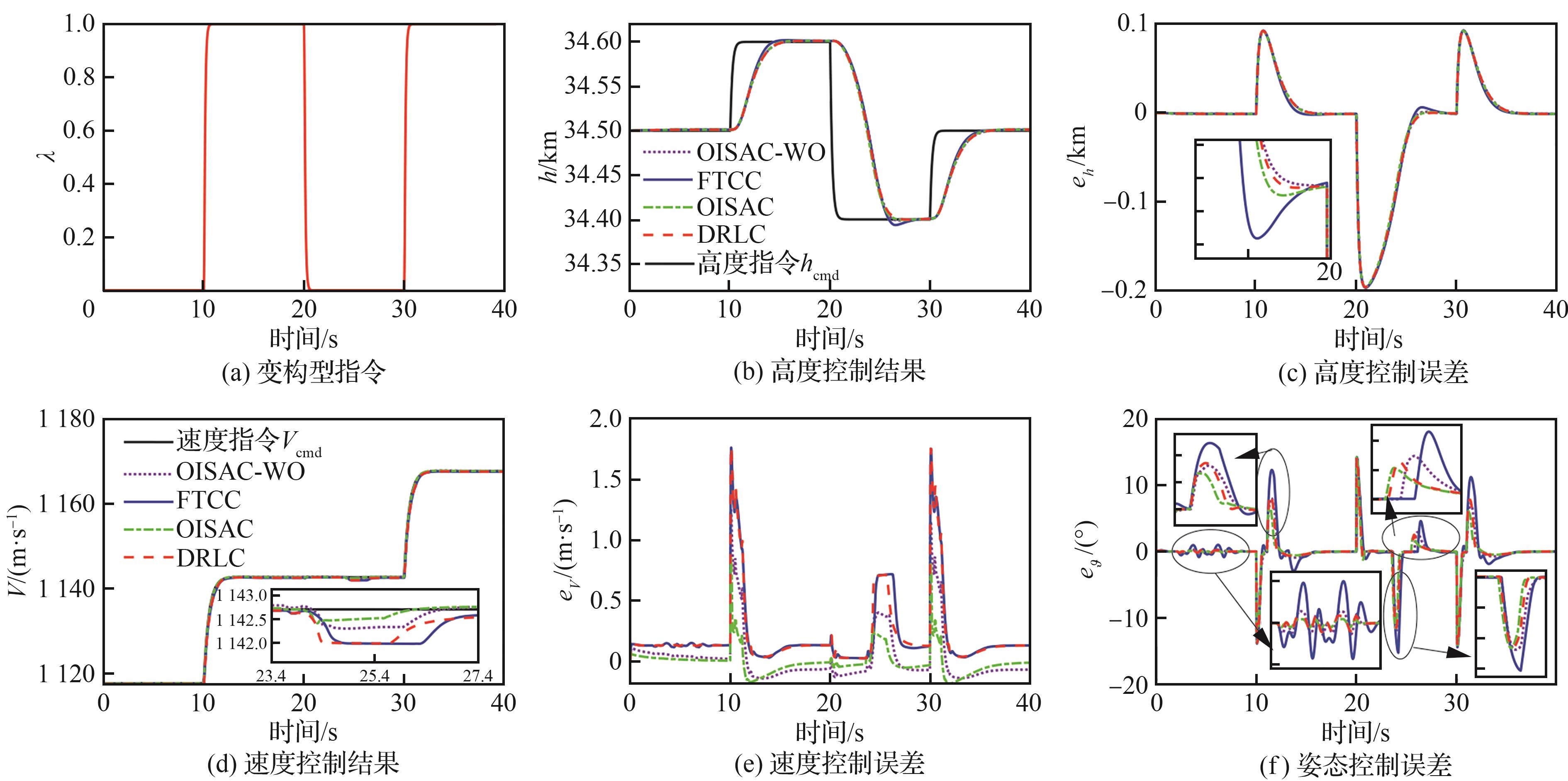

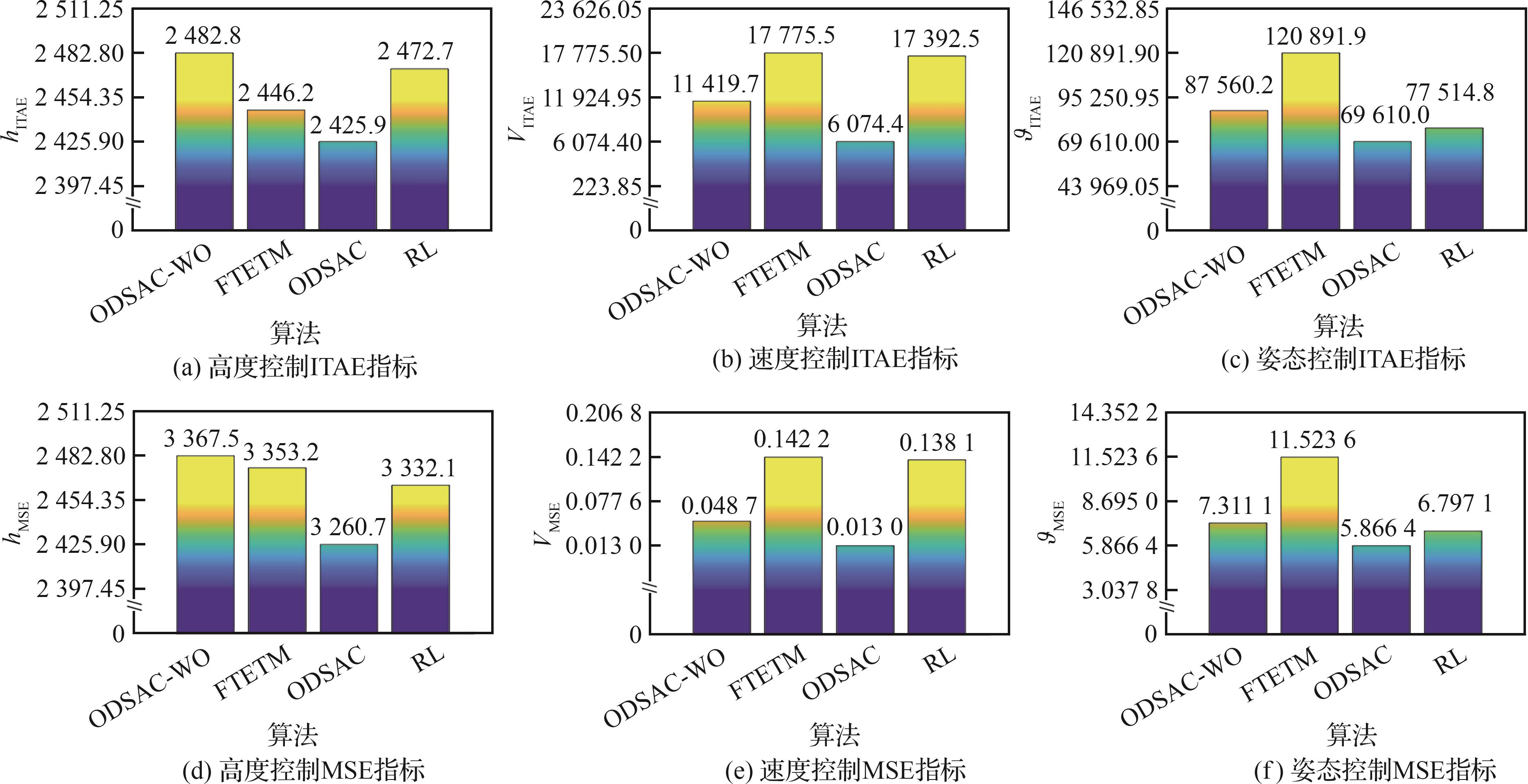
Fig.7
Error metrics of hardware-in-the-loop simulation
| [1] | 冉茂鹏, 王成才, 刘华华, 等. 变体飞行器控制技术发展现状与展望[J]. 航空学报, 2022, 43(10): 527449. |
| RAN M P, WANG C C, LIU H H, et al. Research status and future development of morphing aircraft control technology[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(10): 527449 (in Chinese). | |
| [2] | 柯智骞, 骆俊衡, 马锐, 等. 宽域自适应变体飞行器技术研究进展[J]. 战术导弹技术, 2024(4): 16-29. |
| KE Z Q, LUO J H, MA R, et al. Research progress of wide-range adaptive morphing aircraft technology[J]. Tactical Missile Technology, 2024(4): 16-29 (in Chinese). | |
| [3] | 程归, 杨广, 郭宏伟, 等. 高超声速变体飞行器关键技术研究综述[J]. 航空科学技术, 2024, 35(5): 28-44. |
| CHENG G, YANG G, GUO H W, et al. Review on key technologies for hypersonic morphing aircraft[J]. Aeronautical Science & Technology, 2024, 35(5): 28-44 (in Chinese). | |
| [4] | 王帅, 晁涛, 韩宇辰, 等. 变体飞行器变形策略与控制方法研究进展[J]. 战术导弹技术, 2024(4): 1-15. |
| WANG S, CHAO T, HAN Y C, et al. Research progress on morphing strategies and control methods for morphing aircraft[J]. Tactical Missile Technology, 2024(4): 1-15 (in Chinese). | |
| [5] | 曹承钰, 李繁飙, 廖宇新, 等. 高超声速变外形飞行器建模与固定时间预设性能控制[J]. 自动化学报, 2024, 50(3): 486-504. |
| CAO C Y, LI F B, LIAO Y X, et al. Modeling and fixed-time prescribed performance control for hypersonic morphing vehicle[J]. Acta Automatica Sinica, 2024, 50(3): 486-504 (in Chinese). | |
| [6] | 张豪, 王鹏, 汤国建, 等. 高超声速变外形飞行器事件触发有限时间控制[J]. 航空学报, 2023, 44(15): 528494. |
| ZHANG H, WANG P, TANG G J, et al. Event-triggered fast finite time control for hypersonic morphing vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528494 (in Chinese). | |
| [7] | 马少捷, 惠俊鹏, 王宇航, 等. 变形飞行器深度强化学习姿态控制方法研究[J]. 航天控制, 2022, 40(6): 3-10. |
| MA S J, HUI J P, WANG Y H, et al. Research on attitude control method of morphing aircraft based on deep reinforcement learning[J]. Aerospace Control, 2022, 40(6): 3-10 (in Chinese). | |
| [8] | 张远, 黄万伟, 路坤锋, 等. 高超声速变外形飞行器建模与有限时间控制[J]. 北京航空航天大学学报, 2022, 48(10): 1979-1993. |
| ZHANG Y, HUANG W W, LU K F, et al. Modeling and finite-time control for hypersonic morphing flight vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(10): 1979-1993 (in Chinese). | |
| [9] | BAO C Y, WANG P, TANG G J. Integrated method of guidance, control and morphing for hypersonic morphing vehicle in glide phase[J]. Chinese Journal of Aeronautics, 2021, 34(5): 535-553. |
| [10] | 殷明, 陆宇平, 何真, 等. 变体飞行器变形辅助机动的建模与滑模控制[J]. 系统工程与电子技术, 2015, 37(1): 128-134. |
| YIN M, LU Y P, HE Z, et al. Modeling and sliding mode control of morphing aircraft for morphing-aided maneuver[J]. Systems Engineering and Electronics, 2015, 37(1): 128-134 (in Chinese). | |
| [11] | 王子健, 张书宇, 侯明哲. 基于在线参数辨识的变体飞行器控制[J]. 兵器装备工程学报, 2022, 43(10): 60-65. |
| WANG Z J, ZHANG S Y, HOU M Z. Morphing aircraft control based on on-line parameter identification[J]. Journal of Ordnance Equipment Engineering, 2022, 43(10): 60-65 (in Chinese). | |
| [12] | 郭鸿飞, 宁国栋, 张科南, 等. 基于深度强化学习的变体飞行器智能参数整定[J]. 空天技术, 2024(5): 60-70, 80. |
| GUO H F, NING G D, ZHANG K N, et al. Intelligent parameter adjusting of morphing aircraft based on deep reinforcement learning[J]. Aerospace Technology, 2024(5): 60-70, 80 (in Chinese). | |
| [13] | WU K J, ZHANG P X, WU H. A new control design for a morphing UAV based on disturbance observer and command filtered backstepping techniques[J]. Science China Technological Sciences, 2019, 62(10): 1845-1853. |
| [14] | ZHANG H, WANG P, TANG G J, et al. Fuzzy disturbance observer-based fixed-time attitude control for hypersonic morphing vehicles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(5): 6577-6593. |
| [15] | CHEN H L, WANG P, TANG G J. Fuzzy disturbance observer-based fixed-time sliding mode control for hypersonic morphing vehicles with uncertainties[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(4): 3521-3530. |
| [16] | 周雨欣, 王鹏, 汤国建, 等. 基于干扰观测器的变形飞行器预设性能控制[J]. 战术导弹技术, 2024(4): 72-82. |
| ZHOU Y X, WANG P, TANG G J, et al. Disturbance observer-based prescribed performance control for morphing aircraft[J]. Tactical Missile Technology, 2024(4): 72-82 (in Chinese). | |
| [17] | CHEN H L, WANG P, TANG G J. Prescribed-time control for hypersonic morphing vehicles with state error constraints and uncertainties[J]. Aerospace Science and Technology, 2023, 142: 108671. |
| [18] | 陈宇腾, 常晶, 陈为胜, 等. 一种高超声速飞行器的纵向变形与飞行最优协调控制方法[J]. 宇航学报, 2025, 46(3): 485-498. |
| CHEN Y T, CHANG J, CHEN W S, et al. Optimal integrated method design for longitudinal morphing and flight control of hypersonic vehicles[J]. Journal of Astronautics, 2025, 46(3): 485-498 (in Chinese). | |
| [19] | GUO Z Y, CAO S Y, YUAN R Z, et al. Reinforcement learning-based integrated decision-making and control for morphing flight vehicles under aerodynamic uncertainties[J]. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(6): 9342-9353. |
| [20] | BAO C Y, WANG P, TANG G J. Data-driven based model-free adaptive optimal control method for hypersonic morphing vehicle[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(4): 3713-3725. |
| [21] | CAO C Y, LI F B, DING R, et al. Intelligent attitude control for morphing flight vehicle: A deep reinforcement learning approach[J]. IEEE Transactions on Vehicular Technology, 2025, 74(6): 8851-8865. |
| [22] | YE L Q, ZONG Q, TIAN B L, et al. Control-oriented modeling and adaptive backstepping control for a nonminimum phase hypersonic vehicle[J]. ISA Transactions, 2017, 70: 161-172. |
| [23] | PARKER J T, SERRANI A, YURKOVICH S, et al. Control-oriented modeling of an air-breathing hypersonic vehicle[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(3): 856-869. |
| [24] | FIORENTINI L, SERRANI A. Adaptive restricted trajectory tracking for a non-minimum phase hypersonic vehicle model[J]. Automatica, 2012, 48(7): 1248-1261. |
| [25] | XU B, WANG X, SHI Z K. Robust adaptive neural control of nonminimum phase hypersonic vehicle model[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(2): 1107-1115. |
| [26] | 晁涛, 王雨潇, 王松艳, 等. 考虑非最小相位特性的高超声速飞行器轨迹跟踪控制[J]. 系统工程与电子技术, 2018, 40(7): 1548-1553. |
| CHAO T, WANG Y X, WANG S Y, et al. Trajectory tracking control for non-minimum phase hypersonic vehicles[J]. Systems Engineering and Electronics, 2018, 40(7): 1548-1553 (in Chinese). | |
| [27] | WANG Y X, CHAO T, WANG S Y, et al. Byrnes-Isidori-based dynamic sliding-mode control for nonminimum phase hypersonic vehicles[J]. Aerospace Science and Technology, 2019, 95: 105478. |
| [28] | 曹承钰, 廖宇新, 曹玉腾, 等. 基于气动参数辨识的变体飞行器自适应控制方法[J]. 控制与信息技术, 2022(3): 8-16. |
| CAO C Y, LIAO Y X, CAO Y T, et al. Aerodynamic parameter identification based adaptive control for morphing vehicle[J]. Control and Information Technology, 2022(3): 8-16 (in Chinese). | |
| [29] | 刘昊东, 张庆振, 郭云鹤, 等. 基于递推最小二乘法的变体飞行器模型参数在线辨识[J]. 空天防御, 2020, 3(3): 103-110. |
| LIU H D, ZHANG Q Z, GUO Y H, et al. Online identification of morphing aircraft model parameters based on recursive least square method[J]. Air & Space Defense, 2020, 3(3): 103-110 (in Chinese). |
| [1] | Zhengyu SONG. Promoting continuous innovation in space transportation systems: Control technologies and challenges [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(6): 531446-531446. |
| [2] | Ming YAN, Jiaxing WANG, Heqi LI, Kai LIU. Active disturbance rejection control of carrier-based aircraft based on offline network/online identification [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531317-531317. |
| [3] | Zibo LIU, Ran ZHANG, Wenchao XUE, Huifeng LI. Active disturbance rejection control for load relief of launch vehicles considering elastic effects [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(1): 330319-330319. |
| [4] | Shuhui WANG, Weimin WANG, Tianqing LI, Jiale WANG, Zhenyu FU, Ya ZHANG. Identification method of foreign object impact on blade based on blade tip timing [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(20): 430051-430051. |
| [5] | Zixiao YANG, Shiyao LI, Chen WEI, Zhan LI, Bo ZHU. Robust control of underactuated 3-DOF helicopter based on lower order disturbance estimator [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(1): 629056-629056. |
| [6] | Xu ZHAO, Guoyuan QI, Xinchen YU, Jianbing HU, Xia LI. Compensation function observer and its application in flight vehicle attitude control [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(9): 327224-327224. |
| [7] | Jiajie CHEN, Jiqiang WANG, Haibo ZHANG, Zhongzhi HU, Xinmin CHEN. Design of steady-state disturbance rejection controller for aeroengine based on geometric design method in finite frequency range [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(9): 327434-327434. |
| [8] | Jiaqi SHAO, Xiaohui ZHANG, Hanyu XI, Zirong LIU. Multi⁃loop energy control method of linear active disturbance rejection for solar⁃powered UAVs [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(10): 327812-327812. |
| [9] | LI Xia, QI Guoyuan, GUO Xitong, ZHAO Xu. High-order differential feedback control and its application in quadrotor UAV [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(12): 326047-326047. |
| [10] | WU Zhengping, DENG Cong, WEN hai. Fuzzy linear/nonlinear active disturbance rejection switching control and its application [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(9): 324710-324710. |
| [11] | YOU Zhipeng, YANG Yong, LIU Gang, CAO Xiaorui, ZHENG Hongtao. Reentry guidance algorithm based on Kalman filter for aerospace vehicles [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 524608-524608. |
| [12] | ZHOU Siquan, DONG Xiwang, LI Qingdong, REN Zhang. Time-varying formation control and disturbance rejection for UAV-UGV heterogeneous swarm system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S1): 723767-723767. |
| [13] | ZHAO Yi, ZHANG Hongbo, TANG Guojian. Strapdown stellar-inertial composite guidance method for ballistic missiles considering star sensor installation errors [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(8): 623603-623603. |
| [14] | PIAO Minnan, CHEN Zhigang, SUN Mingwei, CHEN Zengqiang. Adaptive aeroservoelasticity suppression of hypersonic vehicles [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(11): 623698-623698. |
| [15] | FEI Lun, DUAN Haibin, XU Xiaobin, BAO Rui, SUN Yongbin. ADRC controller design for UAV based on variable weighted mutant pigeon inspired optimization [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(1): 323490-323490. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341