Acta Aeronautica et Astronautica Sinica ›› 2024, Vol. 45 ›› Issue (6): 328944.doi: 10.7527/S1000-6893.2023.28944
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Hongyu YIN1, Yu WU1( ), Tianjiao LIANG2
), Tianjiao LIANG2
Received:2023-04-28
Revised:2023-06-17
Accepted:2023-07-12
Online:2024-03-25
Published:2023-07-21
Contact:
Yu WU
E-mail:cquwuyu@cqu.edu.cn
Supported by:CLC Number:
Hongyu YIN, Yu WU, Tianjiao LIANG. Cooperative path planning for patrol coverage of fixed wing UAV[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(6): 328944.
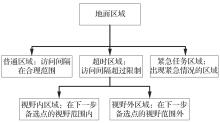
Fig.1
Classification of regions on ground
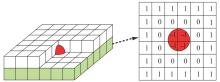
Fig.2
State information of space grids
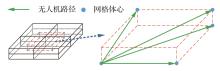
Fig.3
Multiple forms of movement of UAVs in gridded space
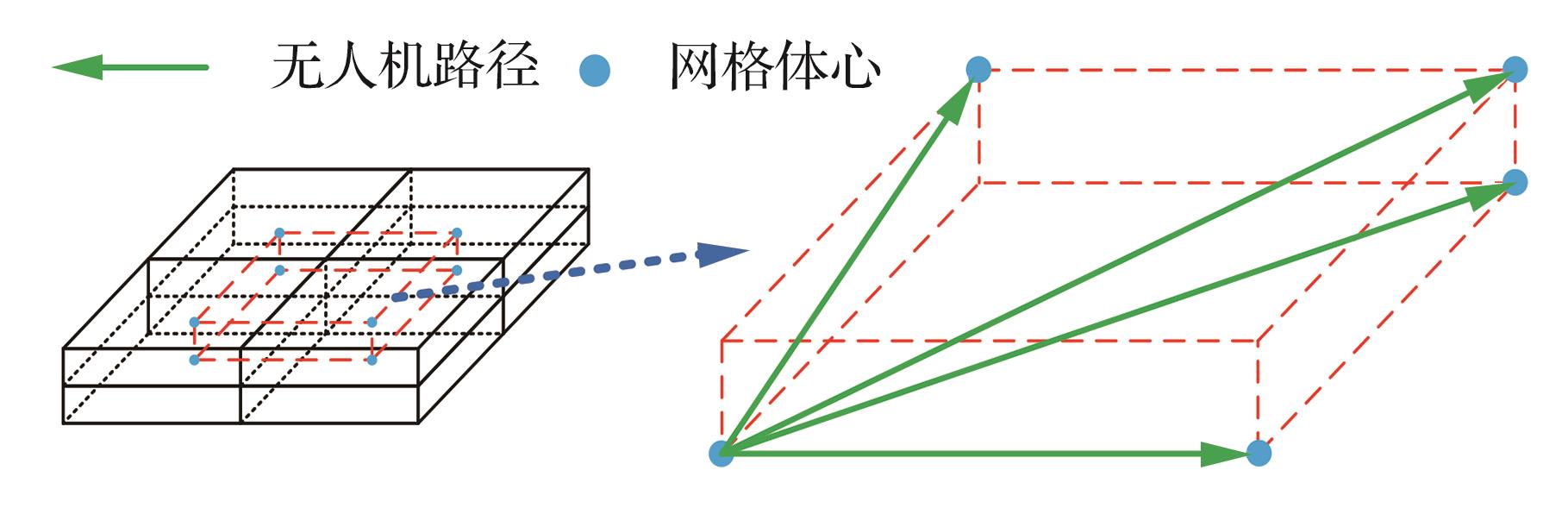
Fig.4
Sight model of fixed-wing UAV
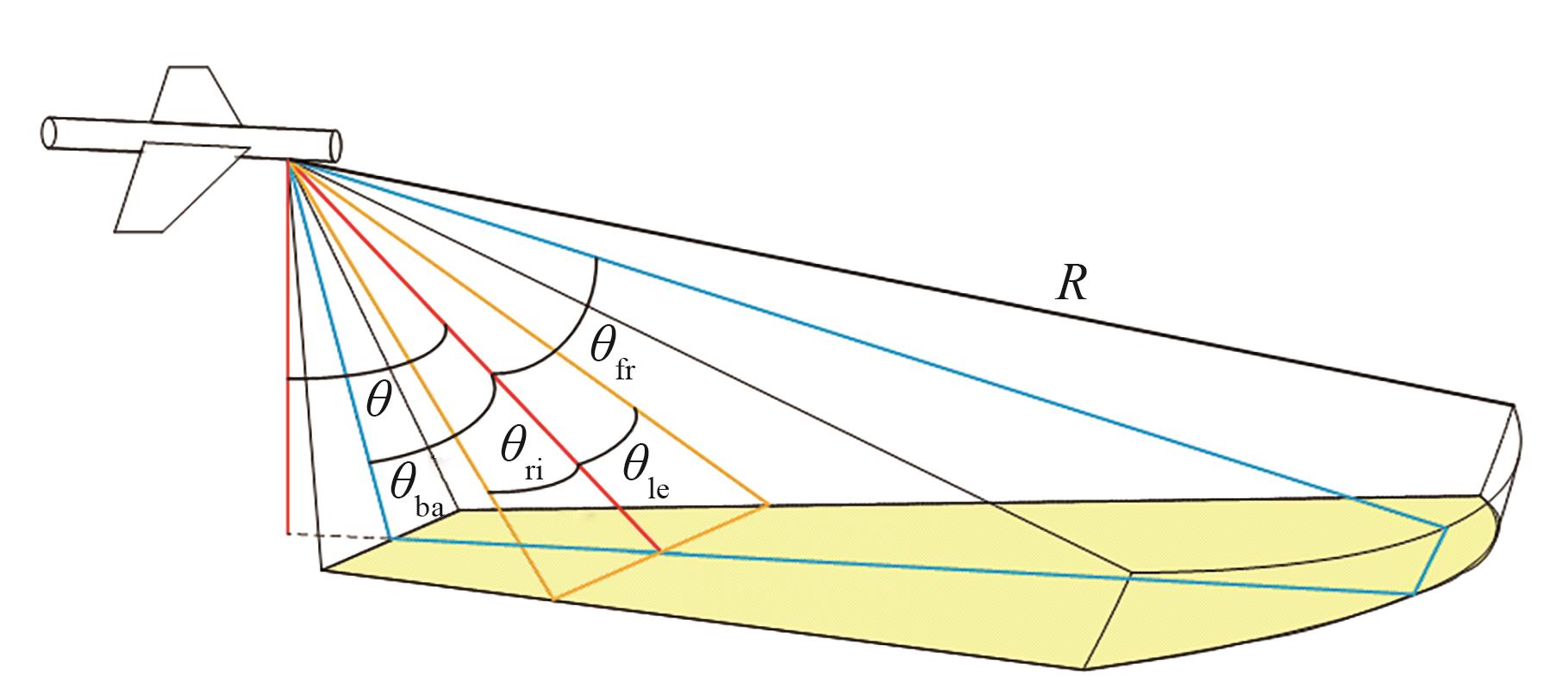
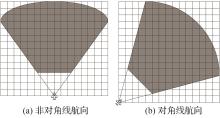
Fig.5
Coverage area of two types of reconnaissance flight
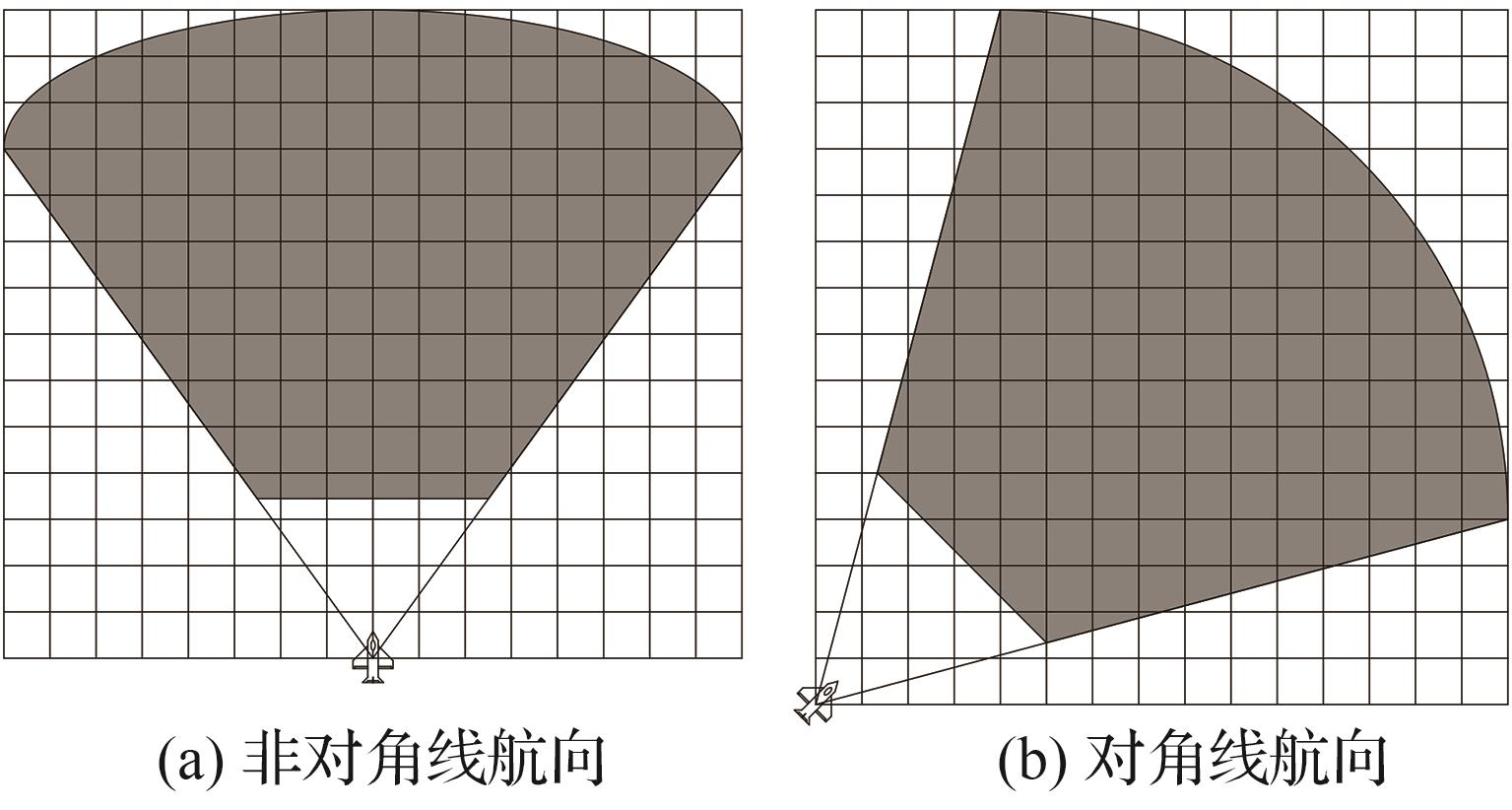
Table 1
Boundary of square area
| θhead | x方向范围 | y方向范围 |
|---|---|---|
| 0° | ||
| 45° | ||
| 90° | ||
| 135° | ||
| 180° | ||
| 225° | ||
| 270° | ||
| 315° |
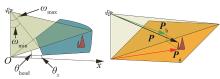
Fig.6
Angle and vector quantity in calculation of UAV sight
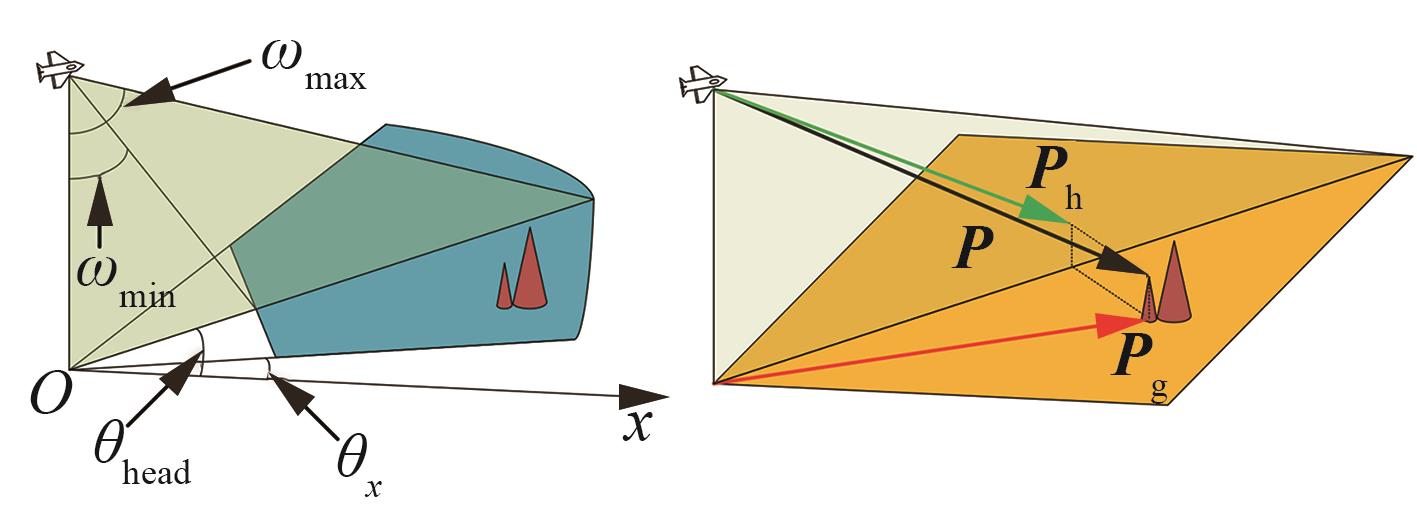
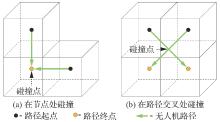
Fig.7
Two types of collisions
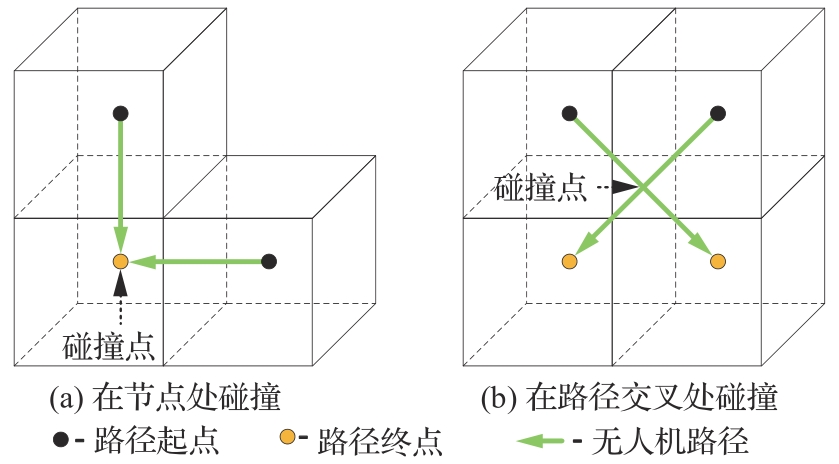
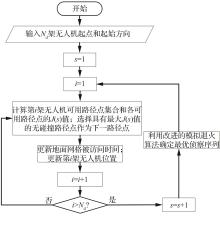
Fig.8
Flow chart of patrolling and collaborative coverage path planning algorithm
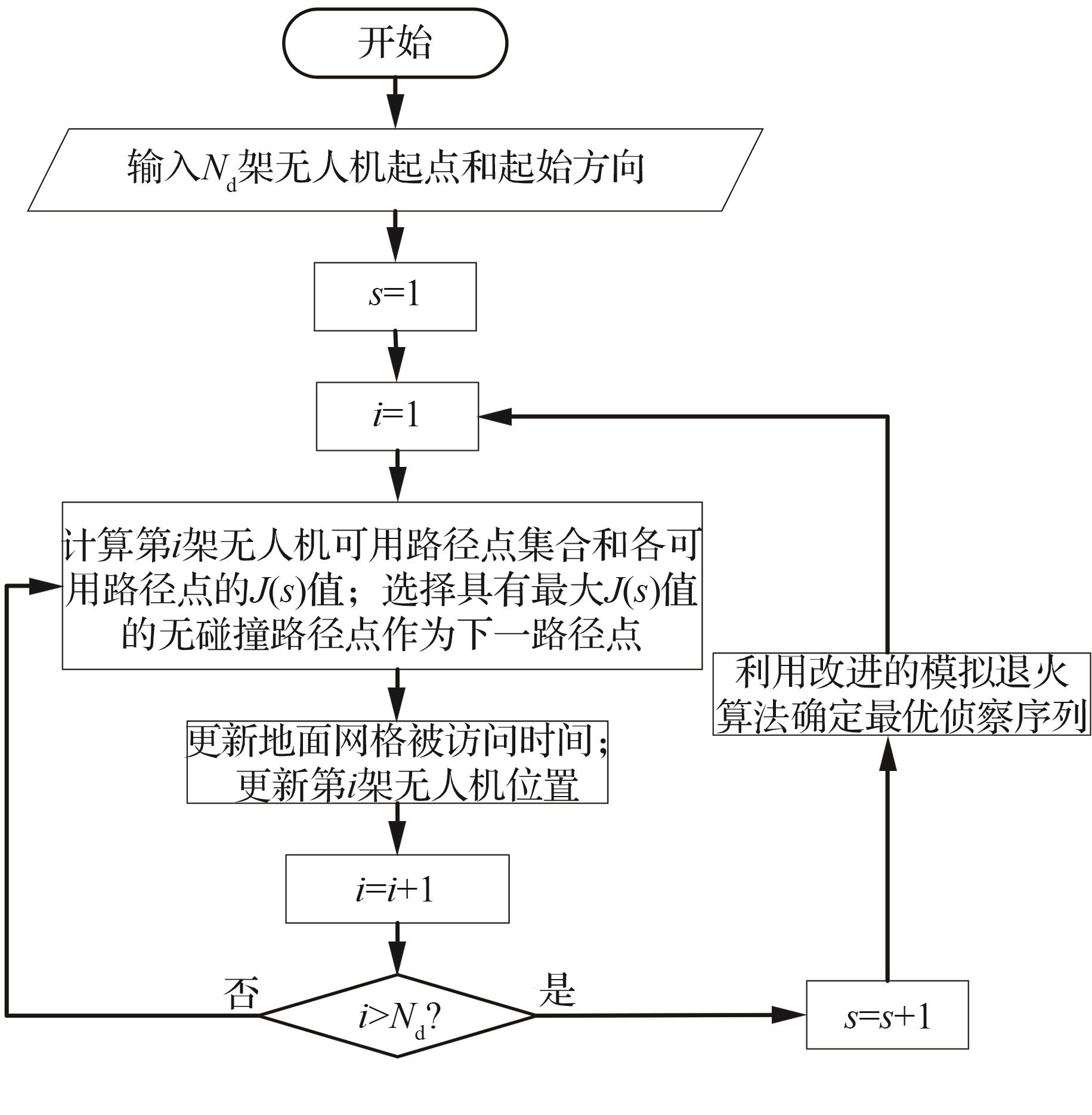

Fig.9
Schematic diagram of dynamic target
Fig.10
Flow chart of optimized A* with directional constraints
Fig.11
Principle of obstacle avoidance
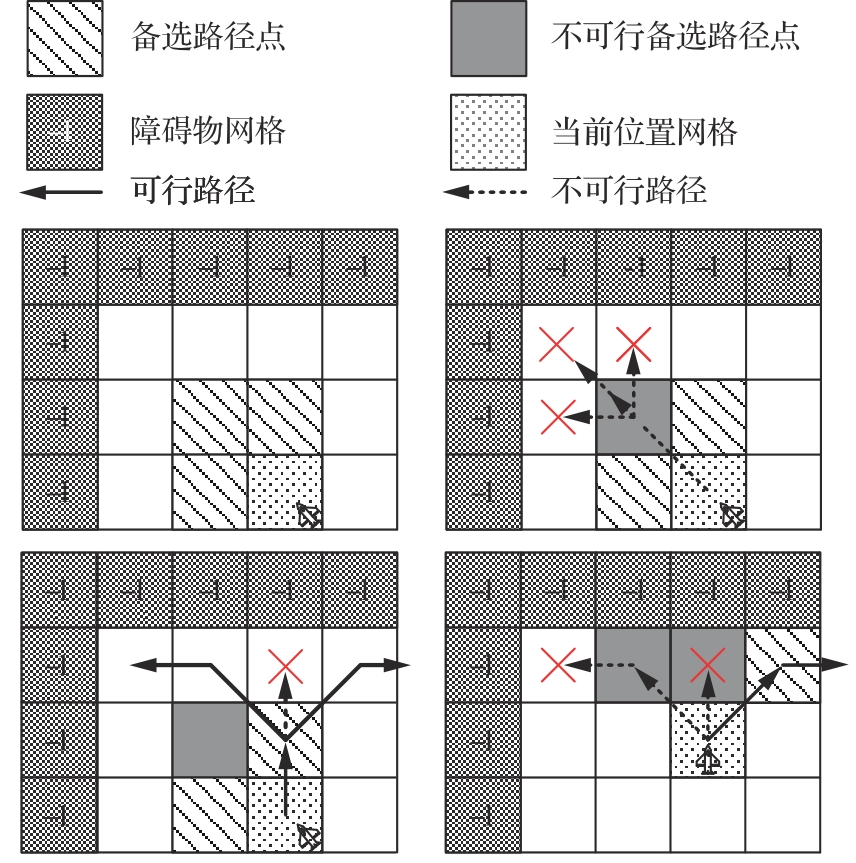
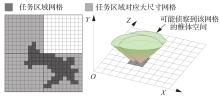
Fig.12
Grids of emergency area and cone in task space
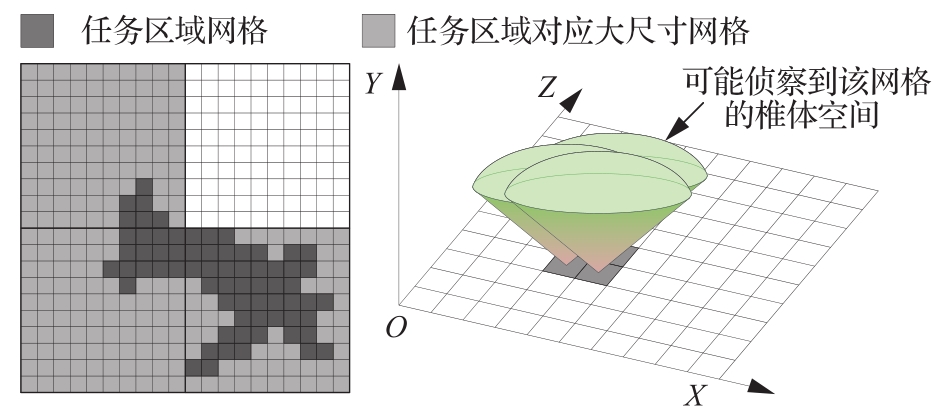
Fig.13
The first time scout
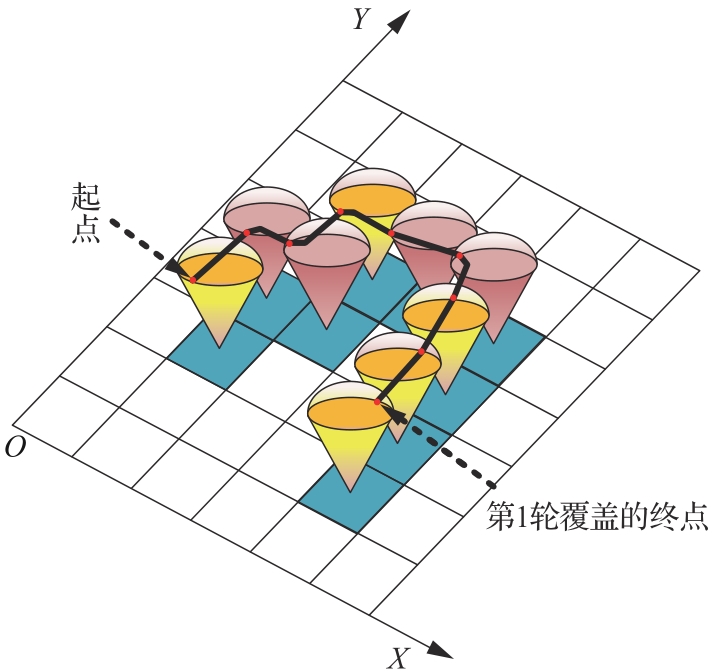
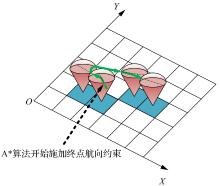
Fig.14
The second time scout
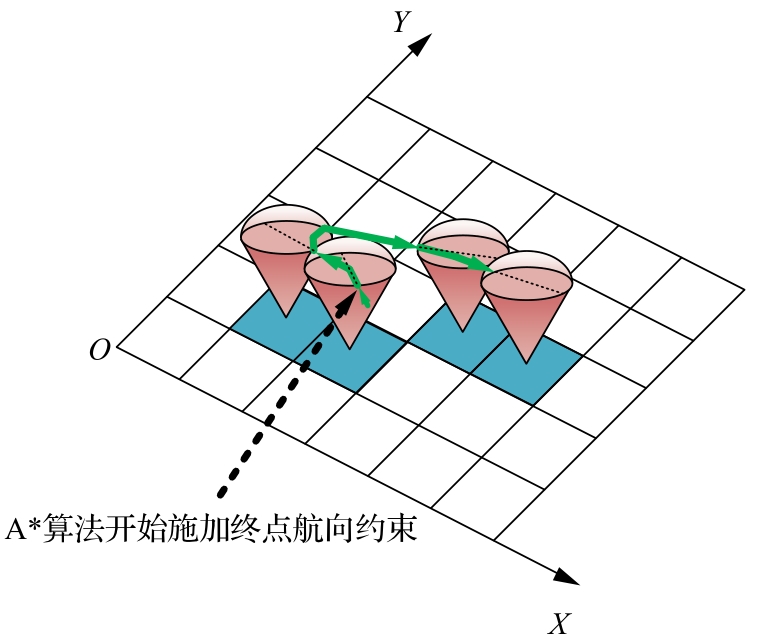
Table 2
Parameters of model
| 状态参数 | 数值 |
|---|---|
| θfr/(°) | 30 |
| θba/(°) | 30 |
| θle/(°) | 30 |
| θri/(°) | 30 |
| a/m | 1 000 |
| b/m | 1 000 |
| h/m | 1 00 |
| [xmin,xmax]/km | [0,50] |
| [ymin,ymax]/km | [0,50] |
| [zmin,zmax]/km | [0,5] |
| ΔTv/步 | 20 |
| Nd | 5 |
| 地面网格长ag/m | 100 |
| 地面网格宽bg/m | 100 |
| 全区域尺寸Lx /km | 50 |
| 全区域尺寸Ly /km | 50 |
Table 3
Initial coordinates of UAVs
| 无人机编号 | 初始位置坐标/km |
|---|---|
| 1 | (13.5,27.5,4.75) |
| 2 | (47.5,24.50,4.05) |
| 3 | (39.5,47.5,3.25) |
| 4 | (33.5,37.5,3.75) |
| 5 | (2.5,4.5,4.15) |
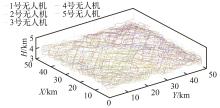
Fig.15
UAVs paths in clear space
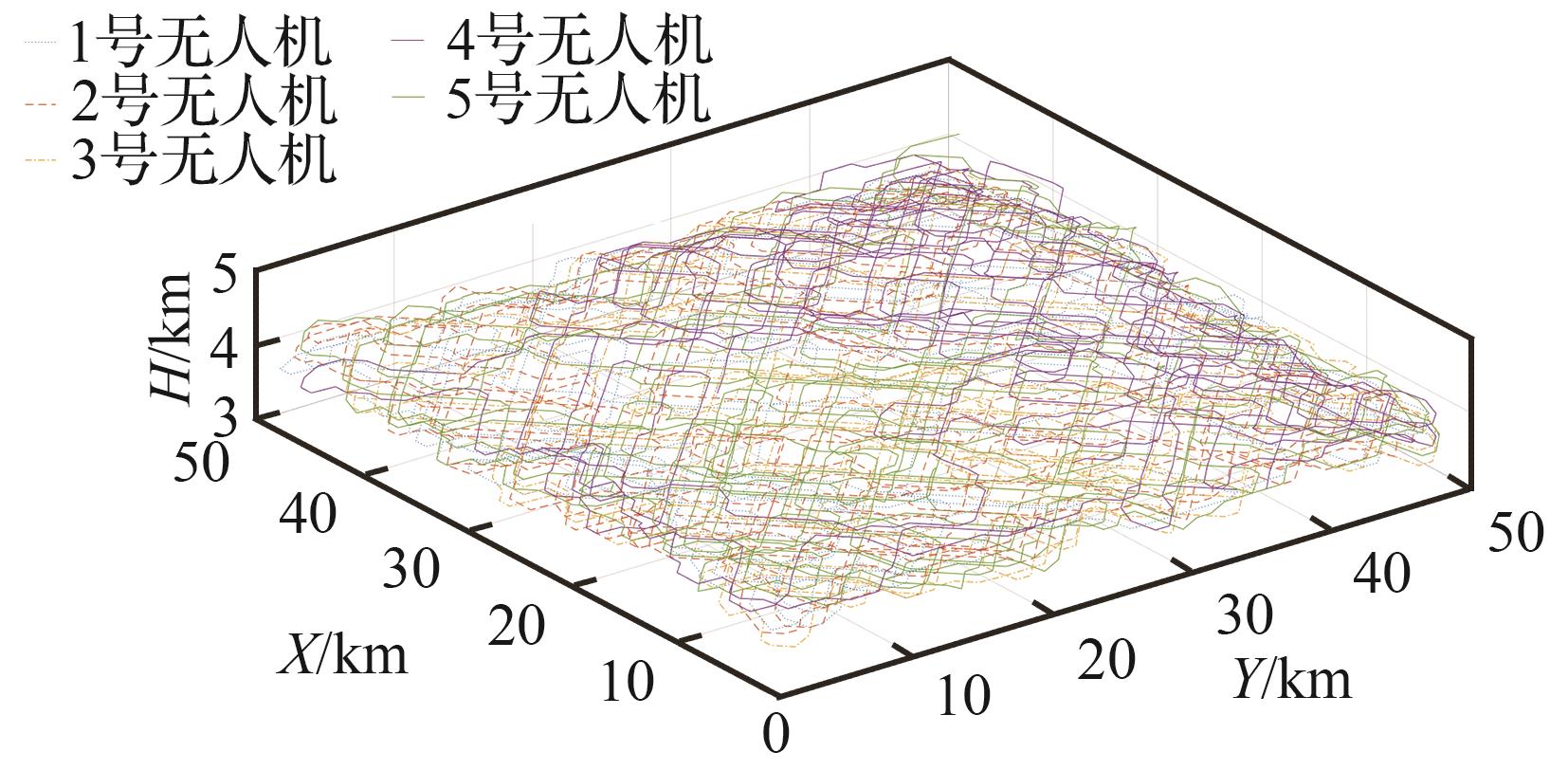
Fig.16
Coverages of UAVs in clear space
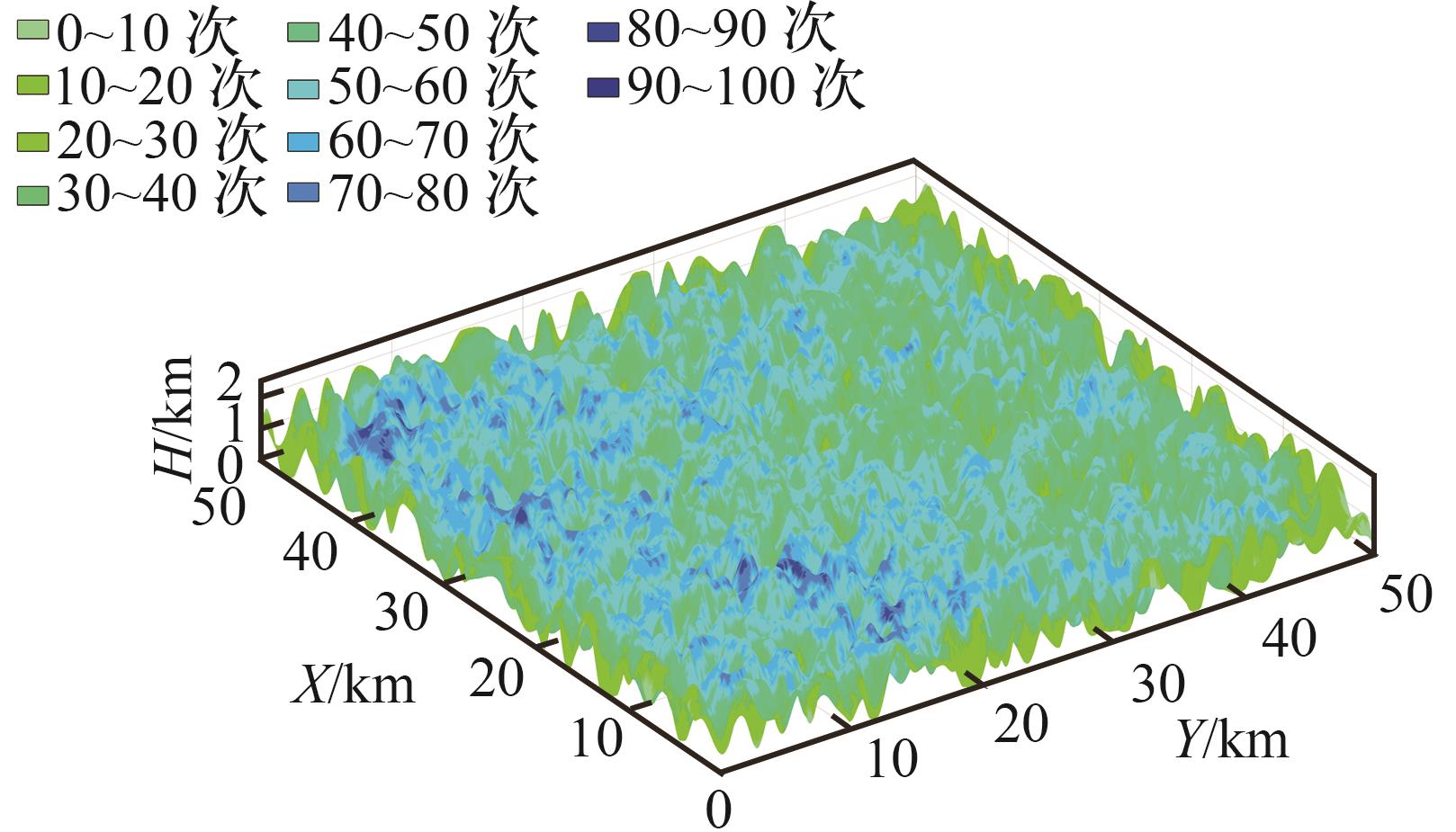
Fig.17
UAVs path in space with no-fly zones
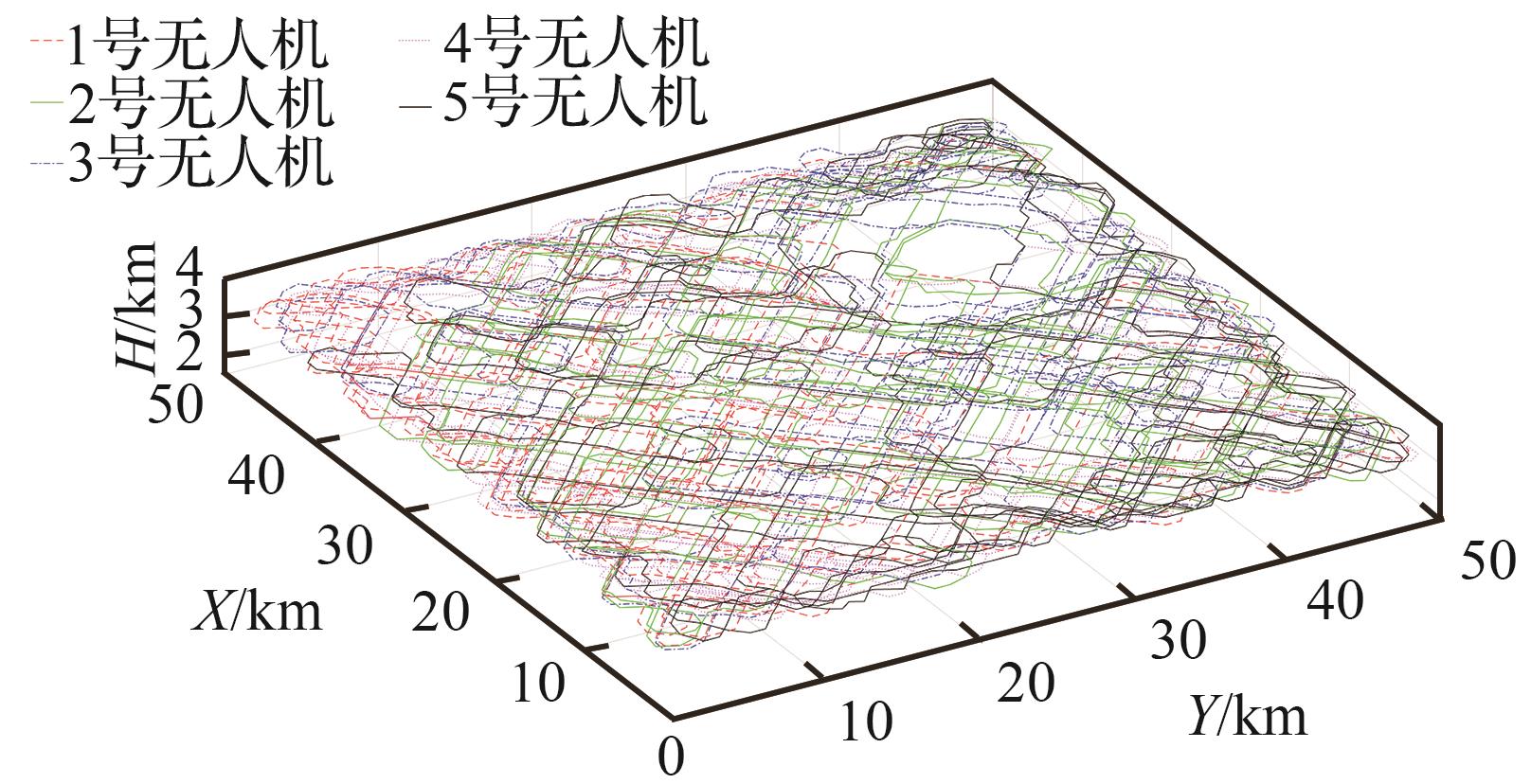
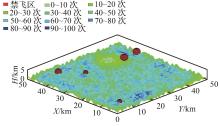
Fig.18
Coverage of UAVs in space with no-fly zones
Fig.19
Parameters sv of grids and average parameters sv
Fig.20
Curves of optimized parameters sv in two spaces
Fig.21
Curves of optimized parameters for different number of UAVs
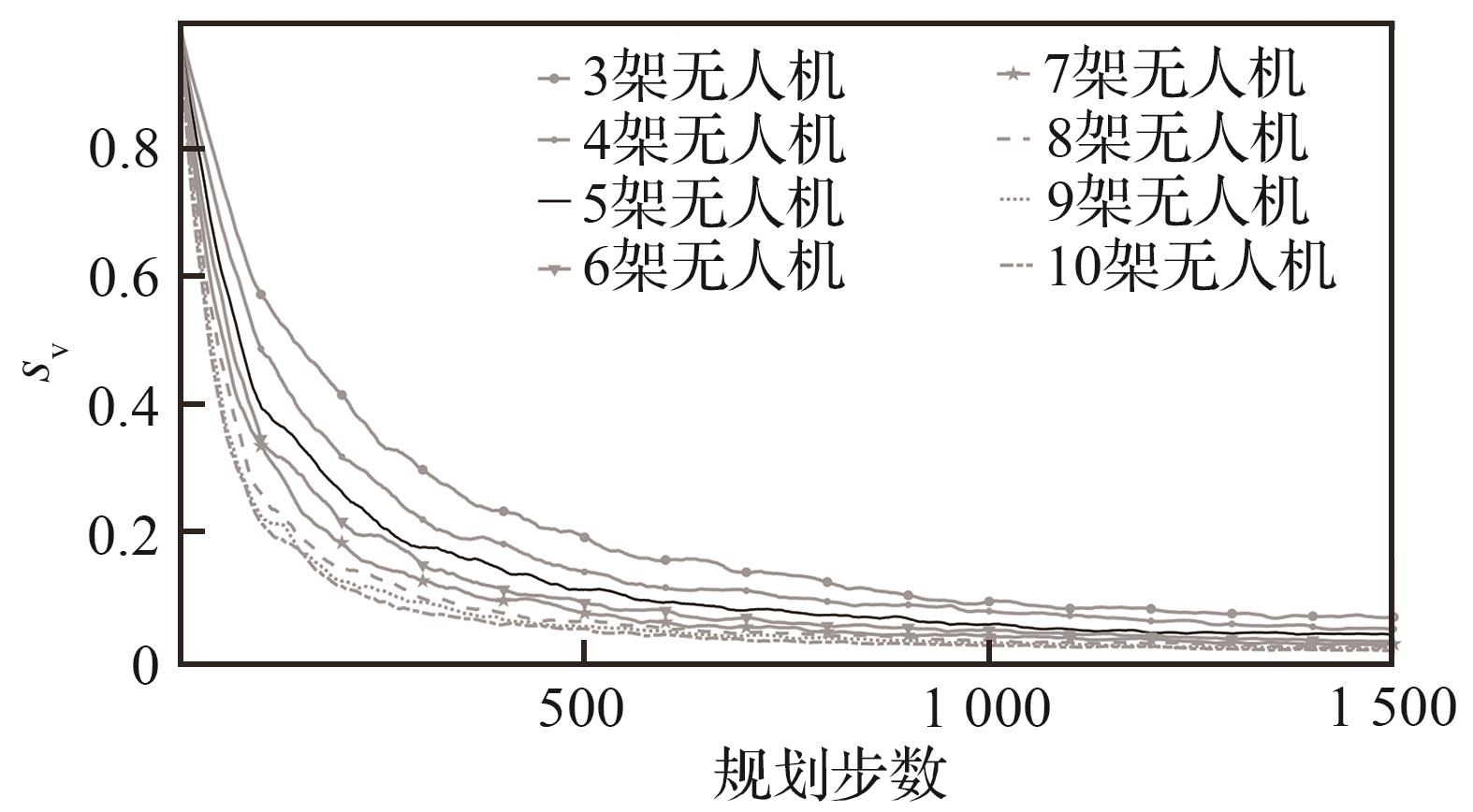

Fig.22
Situation of emergency task
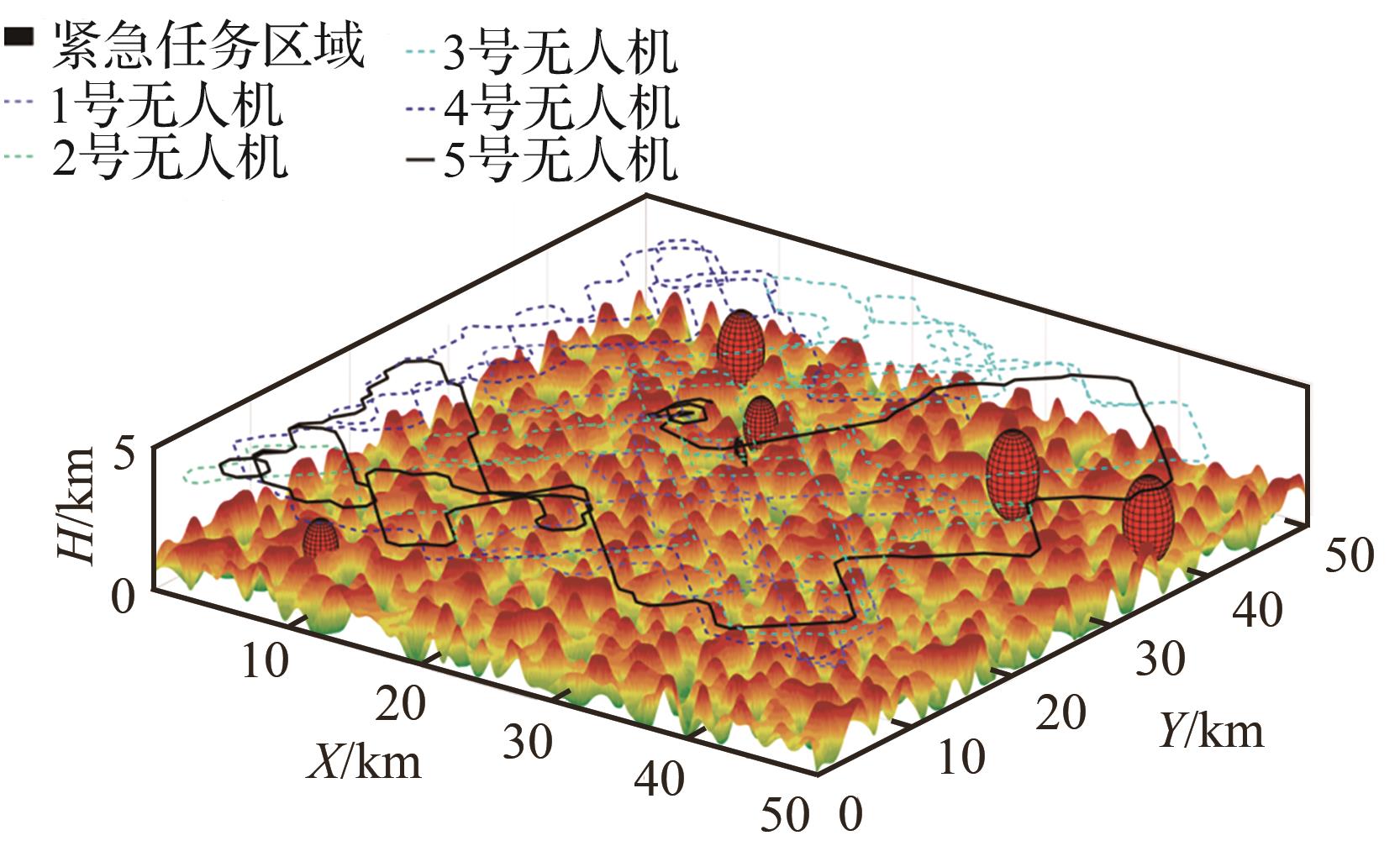
Fig.23
UAV path of emergency task
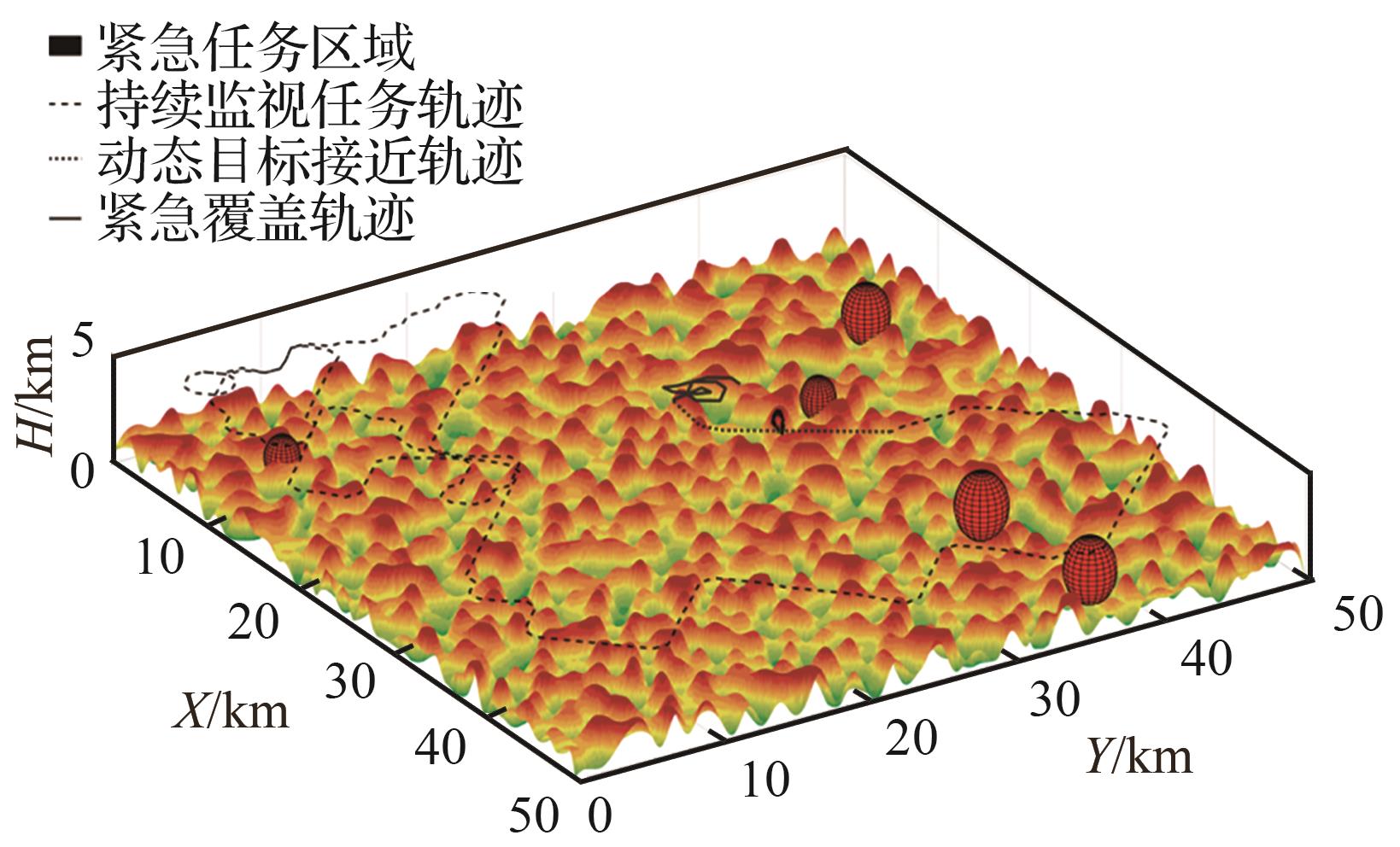
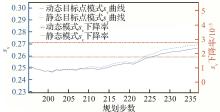
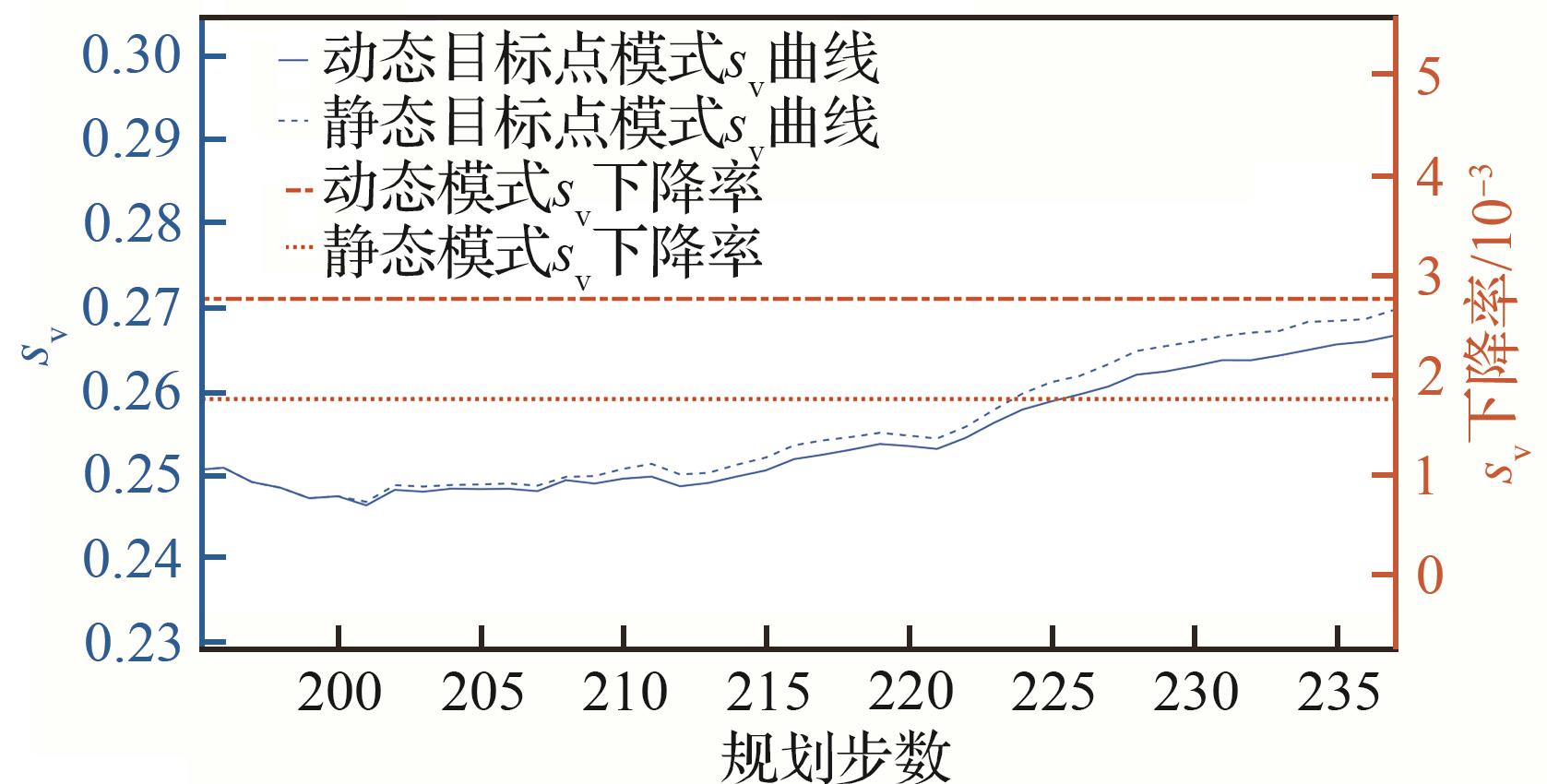
Fig.24
Efficiency comparison of dynamic target and statical target
| 1 | SHAO J, CHENG J, XIA B Y, et al. A novel service system for long-distance drone delivery using the “ant colony A*” algorithm[J]. IEEE Systems Journal, 2021, 15(3): 3348-3359. |
| 2 | 江波, 屈若锟, 李彦冬, 等. 基于深度学习的无人机航拍目标检测研究综述[J]. 航空学报, 2021, 42(4): 524519. |
| JIANG B, QU R K, LI Y D, et al. Object detection in UAV imagery based on deep learning: Review[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(4): 524519 (in Chinese). | |
| 3 | LIU S, LIU D Y, SRIVASTAVA G, et al. Overview and methods of correlation filter algorithms in object tracking[J]. Complex & Intelligent Systems, 2021, 7(4): 1895-1917. |
| 4 | 唐大全, 邓伟栋, 柳向阳. 无人机编队构建所面临的关键技术分析[J]. 自动化与仪器仪表, 2019(8): 85-90. |
| TANG D Q, DENG W D, LIU X Y. Analysis of the problems faced by UAV formation[J]. Automation & Instrumentation, 2019(8): 85-90 (in Chinese). | |
| 5 | 卢俊文, 王倩营. 无人机演变与发展研究综述[J]. 飞航导弹, 2017(11): 45-48, 68. |
| LU J W, WANG Q Y. Review on evolution and development of UAV[J]. Aerodynamic Missile Journal, 2017(11): 45-48, 68 (in Chinese). | |
| 6 | WU Y, LOW K H. An adaptive path replanning method for coordinated operations of drone in dynamic urban environments[J]. IEEE Systems Journal, 2021, 15(3): 4600-4611. |
| 7 | NETJASOV F, JANIC M. A review of research on risk and safety modelling in civil aviation[J]. Journal of Air Transport Management, 2008, 14(4): 213-220. |
| 8 | 刘建生, 徐赛, 王晨, 等. 一种面向未知环境的无人机群区域覆盖搜索算法研究[J]. 软件, 2023, 44(1): 57-61, 70. |
| LIU J S, XU S, WANG C, et al. Research on area coverage search algorithm for UAVs in unknown environment[J]. Software, 2023, 44(1): 57-61, 70 (in Chinese). | |
| 9 | CABREIRA T M, DI FRANCO C, FERREIRA P R, et al. Energy-aware spiral coverage path planning for UAV photogrammetric applications[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 3662-3668. |
| 10 | ARRIBAS E, MANCUSO V, CHOLVI V. Coverage optimization with a dynamic network of drone relays[J]. IEEE Transactions on Mobile Computing, 2020, 19(10): 2278-2298. |
| 11 | 陈海, 何开锋, 钱炜祺. 多无人机协同覆盖路径规划[J]. 航空学报, 2016, 37(3): 928-935. |
| CHEN H, HE K F, QIAN W Q. Cooperative coverage path planning for multiple UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(3): 928-935 (in Chinese). | |
| 12 | WU Y, WU S B, HU X T. Multi-constrained cooperative path planning of multiple drones for persistent surveillance in urban environments[J]. Complex & Intelligent Systems, 2021, 7(3): 1633-1647. |
| 13 | 王茜,王翔宇,焦俊 等.高空长航时太阳能无人机三维全覆盖航迹规划[J/OL].北京航空航天大学学报 (2023-01-04)[2023-04-28].. |
| WANG Q, WANG X Y, JIAO J, et al. High-altitude long-endurance solar-powered UAV 3D full coverage flight path planning[J/OL]. Journal of Beijing University of Aeronautics and Astronautics (2023-01-04)[2023-07-17]. (in Chinese). | |
| 14 | 李慧. 多无人机协作三维覆盖路径规划研究[D]. 武汉: 武汉科技大学, 2022. |
| LI H. Multi UAVs cooperative 3D coverage path planning[D].Wuhan: Wuhan University of Science and Technology, 2022 (in Chinese). | |
| 15 | 欧阳志平, 冯纪强, 王波. 基于多旅行商优化模型的无人机航线规划研究[J]. 数学的实践与认识, 2018, 48(15): 64-74. |
| OUYANG Z P, FENG J Q, WANG B. Research of UAV route planning based on the multiple traveling optimization model[J]. Mathematics in Practice and Theory, 2018, 48(15): 64-74 (in Chinese). | |
| 16 | XIE J F, CARRILLO L R G, JIN L. An integrated traveling salesman and coverage path planning problem for unmanned aircraft systems[J]. IEEE Control Systems Letters, 2019, 3(1): 67-72. |
| 17 | 戴佳佳, 龚小溪, 汪俊. 面向飞机外表面检测任务的无人机覆盖路径规划方法[J]. 机械工程学报, 2023, 59(16): 243-253. |
| DAI J J, GONG X X, WANG J. Coverage path planning method of unmanned aerial vehicle for aircraft surface detection task[J]. Journal of Mechanical Engineering, 59(16): 243-253. | |
| 18 | WU Y, WU S B, HU X T. Cooperative path planning of UAVs & UGVs for a persistent surveillance task in urban environments[J]. IEEE Internet of Things Journal, 2021, 8(6): 4906-4919. |
| 19 | 高春庆, 寇英信, 李战武, 等. 小型无人机协同覆盖侦察路径规划[J]. 系统工程与电子技术, 2019, 41(6): 1294-1299. |
| GAO C Q, KOU Y X, LI Z W, et al. Cooperative coverage path planning for small UAVs[J]. Systems Engineering and Electronics, 2019, 41(6): 1294-1299 (in Chinese). | |
| 20 | 吴宇, 胡莘婷. 城市低空环境中多旋翼无人机在线航线规划方法[J]. 控制与决策, 2021, 36(12): 2851-2860. |
| WU Y, HU X T. An online route planning method for multi-rotor drone in urban environments[J]. Control and Decision, 2021, 36(12): 2851-2860 (in Chinese). | |
| 21 | 张小孟, 胡永江, 李文广, 等. 一种改进的多无人机覆盖航迹规划方法[J]. 兵器装备工程学报, 2020, 41(10): 215-221. |
| ZHANG X M, HU Y J, LI W G, et al. Improved method for coverage track planning of multi-UAV[J]. Journal of Ordnance Equipment Engineering, 2020, 41(10): 215-221 (in Chinese). | |
| 22 | GUASTELLA D C, CANTELLI L, GIAMMELLO G, et al. Complete coverage path planning for aerial vehicle flocks deployed in outdoor environments[J]. Computers & Electrical Engineering, 2019, 75: 189-201. |
| 23 | BIRCHER A, KAMEL M, ALEXIS K, et al. Three-dimensional coverage path planning via viewpoint resampling and tour optimization for aerial robots[J]. Autonomous Robots, 2016, 40(6): 1059-1078. |
| 24 | WU Y, LOW K H, HU X T. Trajectory-based flight scheduling for AirMetro in urban environments by conflict resolution[J]. Transportation Research Part C: Emerging Technologies, 2021, 131: 103355. |
| [1] | Jianjian LIANG, Shoukun WANG, Shaoming HE. Segmented action guidance strategy for autonomous shipborne landing of fixed-wing UAV [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 531116-531116. |
| [2] | Yifeng WANG, Yiming PENG, Long LI, Xiaohui WEI, Hong NIE. DQN-based active arrest and recovery technique for UAVs [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(12): 231448-231448. |
| [3] | Jiayu HAO, Yiming PENG, Xiaohui WEI, Hui MA. Design and analysis of active control arresting device based on MR technology [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(12): 428818-428818. |
| [4] | Yong XU, Hongtao YAN, Tao JIA, Yue MA, Zehua DENG, Duoneng LIU. Aerial simulation docking technology of fixed-wing clustering UAVs [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(5): 326539-326539. |
| [5] | ZHOU Wei, MA Peiyang, GUO Zheng, WANG Daoping, ZHOU Ruisun. Research of combined fixed-wing UAV based on wingtip chained [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 325946-325946. |
| [6] | XIANG Xiaojia, YAN Chao, WANG Chang, YIN Dong. Coordination control method for fixed-wing UAV formation through deep reinforcement learning [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(4): 524009-524009. |
| [7] | ZHANG Chaofan, DONG Qi. Adaptive-gain sliding mode control for fixed-wing UAVs with input saturation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S1): 723755-723755. |
| [8] | WANG Jie, GUO Ziqi, LIU Jianying. Analysis on magnetic compensation model of fixed-wing UAV aeromagnetic detection system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2016, 37(11): 3435-3443. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341