Acta Aeronautica et Astronautica Sinica ›› 2023, Vol. 44 ›› Issue (18): 328296-328296.doi: 10.7527/S1000-6893.2022.28296
• Electronics and Electrical Engineering and Control • Previous Articles Next Articles
Min LI1,2, Li YUAN2( ), Chunling WEI1,2
), Chunling WEI1,2
Received:2022-11-21
Revised:2022-11-28
Accepted:2022-12-07
Online:2023-09-25
Published:2022-12-14
Contact:
Li YUAN
E-mail:yuanli@spacechina.com
Supported by:CLC Number:
Min LI, Li YUAN, Chunling WEI. Spacecraft autonomous fly-around multi-mode control based on hybrid state machine[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(18): 328296-328296.

Fig.1
Process of autonomous fly around without collision risk


Fig.2
State machine model of autonomous fly-around for non-cooperative target


Fig.3
Relevant coordinate system


Fig.4
Track of fly-around

Table 1
Event collection and triggered condition
| 事件 | 事件名称 | 取值 | 触发条件 |
|---|---|---|---|
| 绕飞观测任务开始 | 1 | ||
| 0 | |||
| 远程接近 | 1 | ||
| 0 | |||
| 近程接近 | 1 | ||
| 0 | |||
| 相对位置保持 | 1 | ||
| 0 | |||
| 目标观测 | 1 | ||
| 0 | |||
| 碰撞威胁规避 | 1 | ||
| 0 | |||
| 绕飞转移 | 1 | ||
| 0 | |||
| 撤离 | 1 | ||
| 0 |
Table 2
State transition and transition functions
| 状态转换函数 | 状态转换 | 转换条件 |
|---|---|---|

Fig.5
Structure of closed-loop hybrid systems
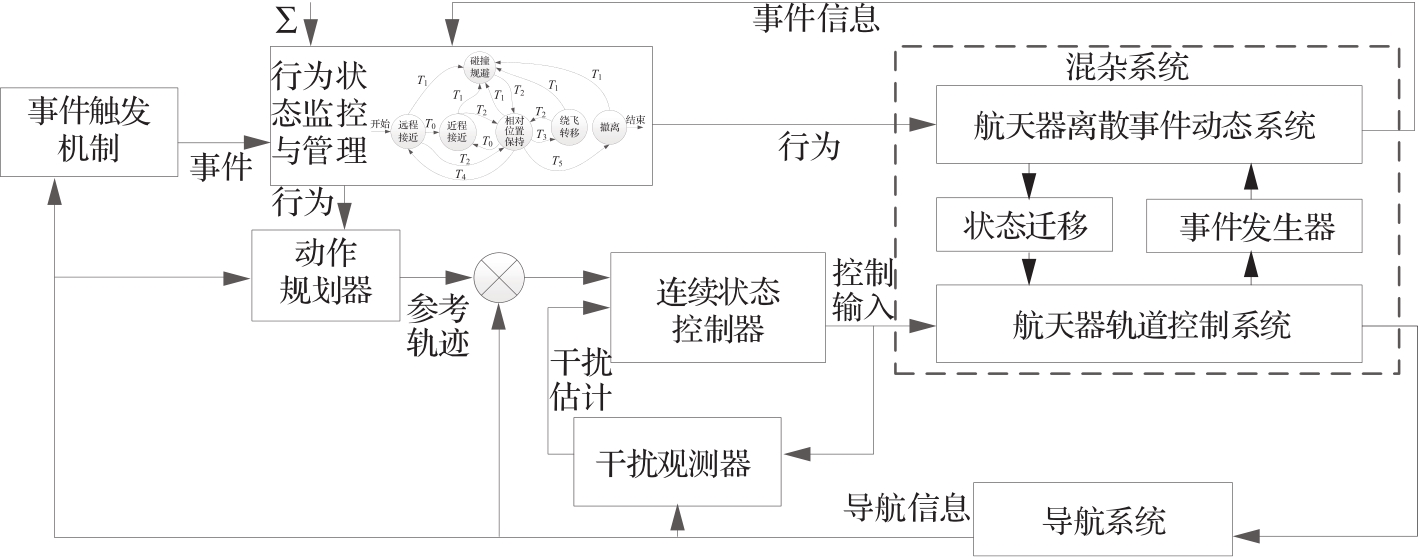

Fig.6
Continuous variable close-loop control system


Fig.7
Estimation and estimation error of uncertainty fx


Fig.8
Estimation and estimation error of uncertainty fy


Fig.9
Estimation and estimation error of uncertainty fz


Fig.10
Relative motion and tracking error of x axis


Fig.11
Relative and tracking error motion of y axis


Fig.12
Relative and tracking error motion of z axis


Fig.13
Relative position x axis between spacecraft P and return trajectory


Fig.14
Relative position of y axis between spacecraft P and return trajectory


Fig.15
Relative position z axis between spacecraft P and return trajectory


Fig.16
Event activity of Spacecraft P


Fig.17
State transition of Spacecraft P


Fig.18
Angle of relative position vector and sunlight Vector


Fig.19
Relative distance of spacecrafts


Fig.20
3D view of relative motion between Spacecraft P and Spacecraft E


Fig.21
Control output of x axis


Fig.22
Control output of y axis


Fig.23
Control output of z axis


Fig.24
Trajectories of normal and collision threat avoidance case

| 1 | 黄艺, 贾英民. 非合作目标绕飞任务的航天器鲁棒姿轨耦合控制[J]. 控制理论与应用, 2018, 35(10): 1405-1414. |
| HUANG Y, JIA Y M. Robust relative position and attitude control for non-cooperative fly-around mission[J]. Control Theory & Applications, 2018, 35(10): 1405-1414 (in Chinese). | |
| 2 | 周文勇, 袁建平, 罗建军. 对异面椭圆轨道目标航天器的长期绕飞轨迹设计与控制[J]. 中国空间科学技术, 2006, 26(4): 20-25, 31. |
| ZHOU W Y, YUAN J P, LUO J J. Design and control of long-term flyaround trajectory for target spacecraft in non-coplanar elliptical orbit[J]. Chinese Space Science and Technology, 2006, 26(4): 20-25, 31 (in Chinese). | |
| 3 | 谭天乐. 椭圆轨道交会、悬停与绕飞的全状态反馈控制[J]. 宇航学报, 2016, 37(7): 811-818. |
| TAN T L. Full state feedback control of rendezvous, hovering and fly-around in elliptical orbit[J]. Journal of Astronautics, 2016, 37(7): 811-818 (in Chinese). | |
| 4 | 刘将辉, 李海阳, 杨路易, 等. 强迫绕飞无控旋转目标的控制策略[J]. 系统工程与电子技术, 2019, 41(10): 2310-2319. |
| LIU J H, LI H Y, YANG L Y, et al. Control strategy of forced flying-around uncontrolled rotating targets[J]. Systems Engineering and Electronics, 2019, 41(10): 2310-2319 (in Chinese). | |
| 5 | 常燕, 陈韵, 鲜勇, 等. 椭圆轨道上目标监测绕飞轨道构型设计与构型保持[J]. 系统工程与电子技术, 2017, 39(6): 1317-1324. |
| CHANG Y, CHEN Y, XIAN Y, et al. Configuration design and maintenance of flyaround trajectory for target monitoring in elliptical orbit[J]. Systems Engineering and Electronics, 2017, 39(6): 1317-1324 (in Chinese). | |
| 6 | 师鹏, 李保军, 赵育善. 有限推力下的航天器绕飞轨道保持与控制[J]. 北京航空航天大学学报, 2007, 33(7): 757-760. |
| SHI P, LI B J, ZHAO Y S. Orbital maintenance and control of spacecraft fly-around with finite-thrust[J]. Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(7): 757-760 (in Chinese). | |
| 7 | 路阳, 付艳明, 张卯瑞. 线性连续周期系统的模型参考跟踪控制[J]. 控制与决策, 2016, 31(7): 1279-1284. |
| LU Y, FU Y M, ZHANG M R. Model reference tracking control of linear continuous periodic system[J]. Control and Decision, 2016, 31(7): 1279-1284 (in Chinese). | |
| 8 | 张庆展, 曾占魁, 靳永强, 等. 空间快速绕飞与视线指向的建模与控制[J]. 宇航学报, 2014, 35(3): 324-330. |
| ZHANG Q Z, ZENG Z K, JIN Y Q, et al. Modeling and control on fast fly-around and line of sight pointing[J]. Journal of Astronautics, 2014, 35(3): 324-330 (in Chinese). | |
| 9 | HUANG Y, JIA Y M. Robust adaptive fixed-time tracking control of 6-DOF spacecraft fly-around mission for noncooperative target[J]. International Journal of Robust and Nonlinear Control, 2018, 28(6): 2598-2618. |
| 10 | 于大腾, 王华, 孙福煜. 考虑潜在威胁区的航天器最优规避机动策略[J]. 航空学报, 2017, 38(1): 320202. |
| YU D T, WANG H, SUN F Y. Optimal evasive maneuver strategy with potential threatening area being considered[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(1): 320202 (in Chinese). | |
| 11 | 袁利, 黄煌. 空间飞行器智能自主控制技术现状与发展思考[J]. 空间控制技术与应用, 2019, 45(4): 7-18. |
| YUAN L, HUANG H. Current trends of spacecraft intelligent autonomous control[J]. Aerospace Control and Application, 2019, 45(4): 7-18 (in Chinese). | |
| 12 | 袁利. 面向不确定环境的航天器智能自主控制技术[J]. 宇航学报, 2021, 42(7): 839-849. |
| YUAN L. Spacecraft intelligent autonomous control technology toward uncertain environment[J]. Journal of Astronautics, 2021, 42(7): 839-849 (in Chinese). | |
| 13 | 阮立刚, 王莉, 叶家瑜, 等. 基于混合信号状态机的交流固态功率控制器功能模型[J]. 航空学报, 2017, 38(11): 321133. |
| RUAN L G, WANG L, YE J Y, et al. Functional modeling of AC solid state power controller based on mixed signal state machine[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(11): 321133 (in Chinese). | |
| 14 | 杨胜, 王鑫哲, 李蒙. 基于有限状态机的交会对接飞行任务规划方法[J]. 北京航空航天大学学报, 2019, 45(9): 1741-1746. |
| YANG S, WANG X Z, LI M. RVD flight mission planning and scheduling method based on finite state machine[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(9): 1741-1746 (in Chinese). | |
| 15 | JAGAT A, SINCLAIR A J. Nonlinear control for spacecraft pursuit-evasion game using the state-dependent Riccati equation method[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(6): 3032-3042. |
| 16 | 王峰, 陈雪芹, 曹喜滨. 基于PEA的椭圆轨道航天器编队飞行高精度位置保持[J]. 宇航学报, 2010, 31(9): 2114-2121. |
| WANG F, CHEN X Q, CAO X B. High accuracy relative position keeping based on PEA approach for spacecraft formation flight around eccentric orbits[J]. Journal of Astronautics, 2010, 31(9): 2114-2121 (in Chinese). | |
| 17 | 胡军, 李毛毛. 航天器进入制导方法综述[J]. 航空学报, 2021, 42(11): 525048. |
| HU J, LI M M. Review of spacecraft entry guidance method[J]. Aeronautica et Astronautica Sinica, 2021, 42(11): 525048 (in Chinese). | |
| 18 | 郭洪振, 陈谋. 基于预设性能的四旋翼无人机编队安全控制[J]. 航空学报, 2021, 42(8): 525789. |
| GUO H Z, CHEN M. Safety formation control of quadrotor UAVs based on prescribed performance[J]. Aeronautica et Astronautica Sinica, 2021, 42(8): 525789 (in Chinese). | |
| 19 | HUANG Z C, CHU D F, WU C Z, et al. Path planning and cooperative control for automated vehicle platoon using hybrid automata[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(3): 959-974. |
| 20 | NING X L, GUI M Z, FANG J C, et al. A novel differential Doppler measurement-aided autonomous celestial navigation method for spacecraft during approach phase[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(2): 587-597. |
| [1] | Sai ZHANG, Zhen YANG, Xiangnan DU, Yazhong LUO. Threat avoidance strategy of spacecraft maneuvering approach based on orbital reachable domain [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(4): 328778-328778. |
| [2] | Sun Zhaowei;Liu Yuan;Xu Guodong;Sun Rui. Design of Finite-state-machine for Space Application Based on FPGA Inner RAM [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2010, 31(5): 989-995. |
| [3] | ZHANG Jun;NIE Shu-hui;LIU Feng. Uncertainty-Certainy Mixed Cluster Algorithm and Realization [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2004, 25(3): 279-283. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 145
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 400
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341