ACTA AERONAUTICAET ASTRONAUTICA SINICA ›› 2023, Vol. 44 ›› Issue (12): 27573-027573.doi: 10.7527/S1000-6893.2022.27573
• Reviews • Previous Articles Next Articles
Liangyang ZHANG, Zhanke LI( ), Haiyang HAN
), Haiyang HAN
Received:2022-06-04
Revised:2022-06-27
Accepted:2022-07-29
Online:2023-06-25
Published:2022-08-03
Contact:
Zhanke LI
E-mail:lzk@nwpu.edu.cn
Supported by:CLC Number:
Liangyang ZHANG, Zhanke LI, Haiyang HAN. A review of perching technology of micro⁃UAV[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(12): 27573-027573.
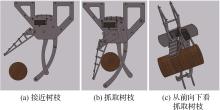
Fig.1
Mechanical grasping mechanism of Franklin Erlin School of Engineering[5]
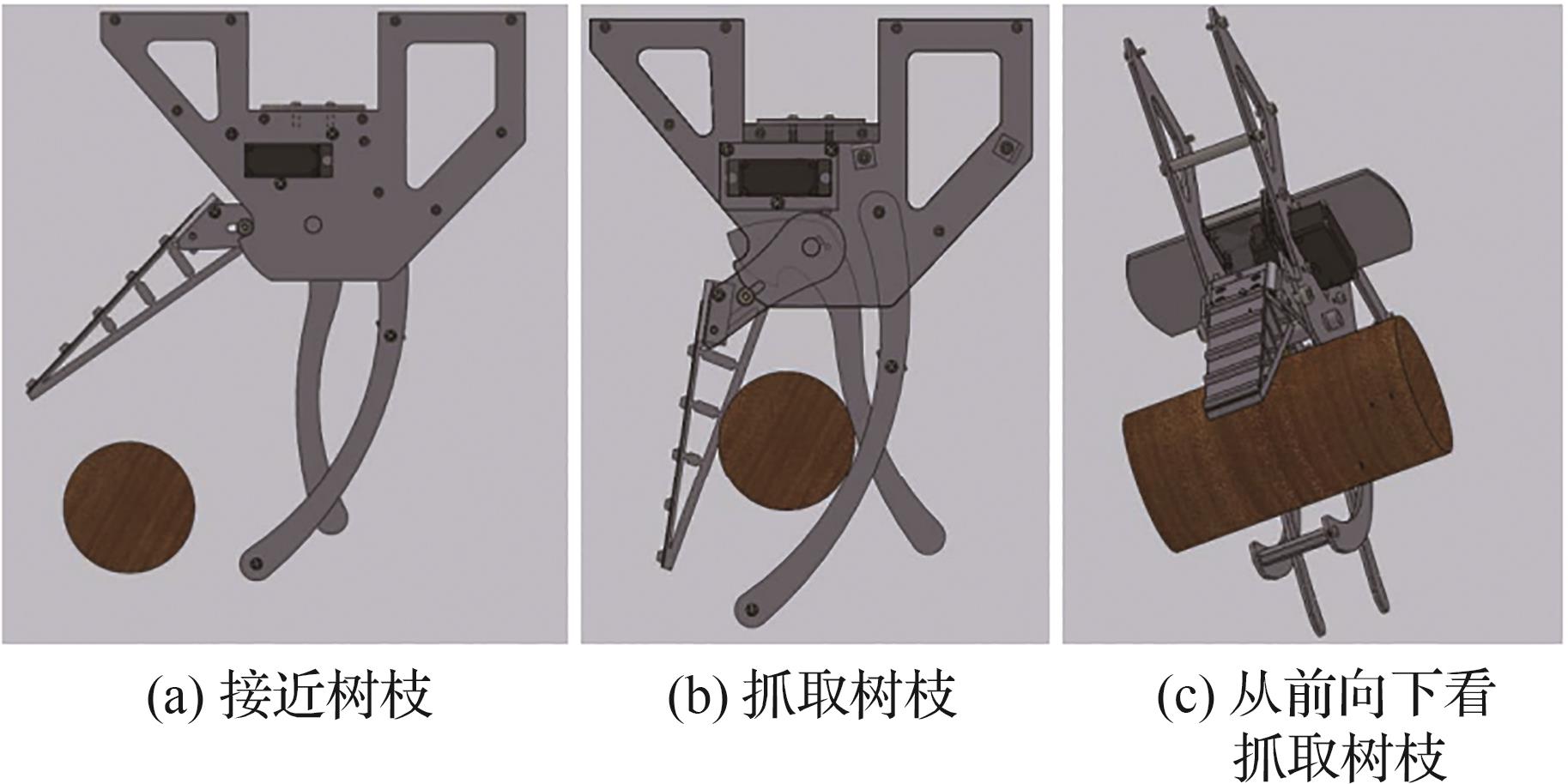

Fig.2
Mechanical grasping mechanism of University of Southampton[6]

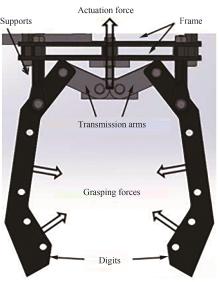
Fig.3
Mechanical grasping mechanism of Nanyang Technological University[7-8]

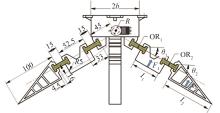
Fig.4
Mechanical grasping mechanism of China University of Petroleum(East China)[9]


Fig.5
Mechanical grasping mechanism of Taylor’s University[10]


Fig.6
Mechanical grasping mechanism of University of Auckland[11]

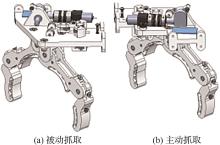
Fig.7
Mechanical grasping mechanism of Johns Hopkins University[12]
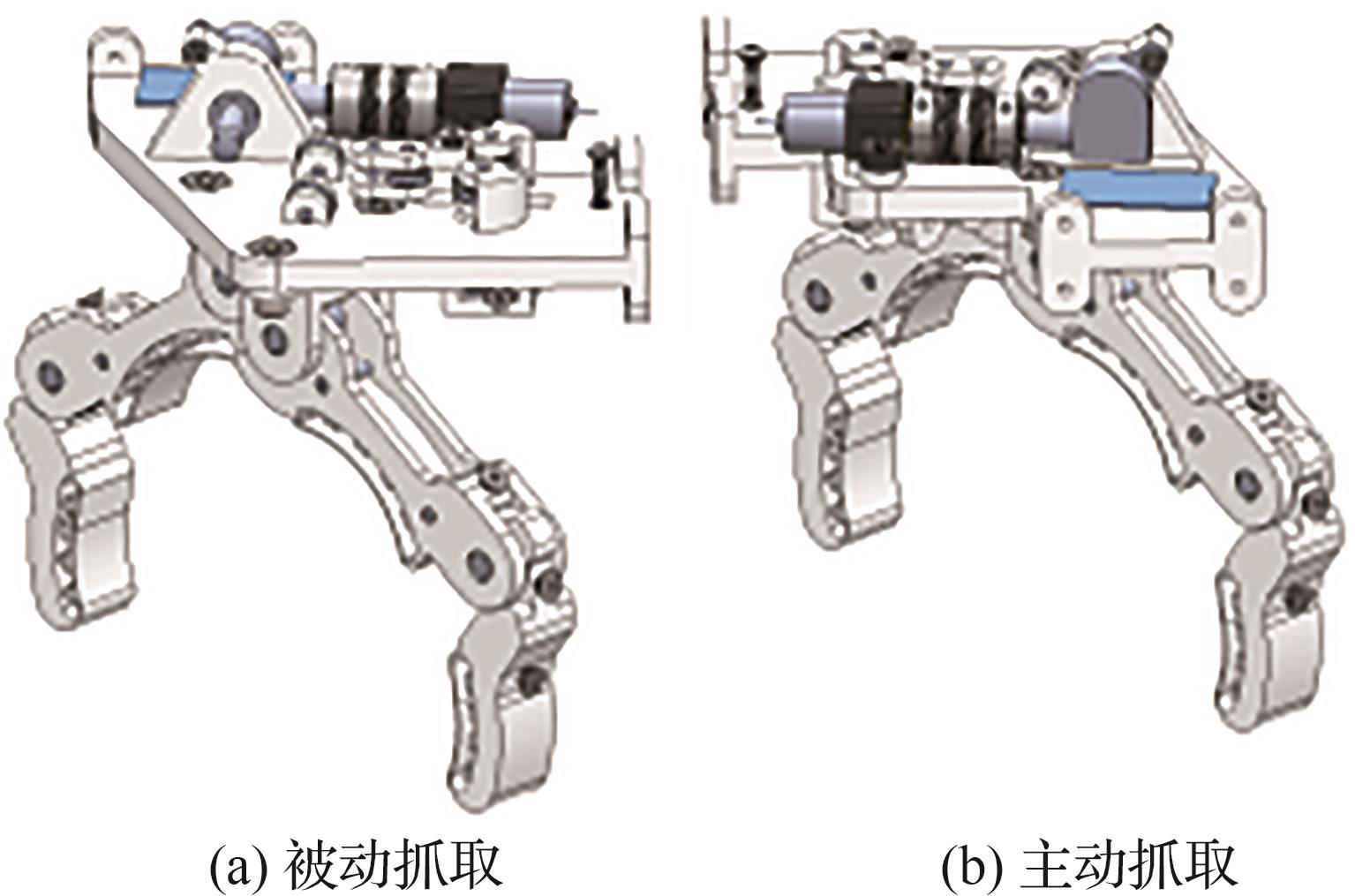
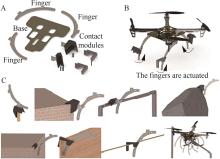
Fig.8
Modularized landing gears mechanism of Yale University [13]


Fig.9
Mechanical grasping mechanism of Colorado State University[14]


Fig.10
A new steady state mechanical grasping mechanism of Colorado State University[15]
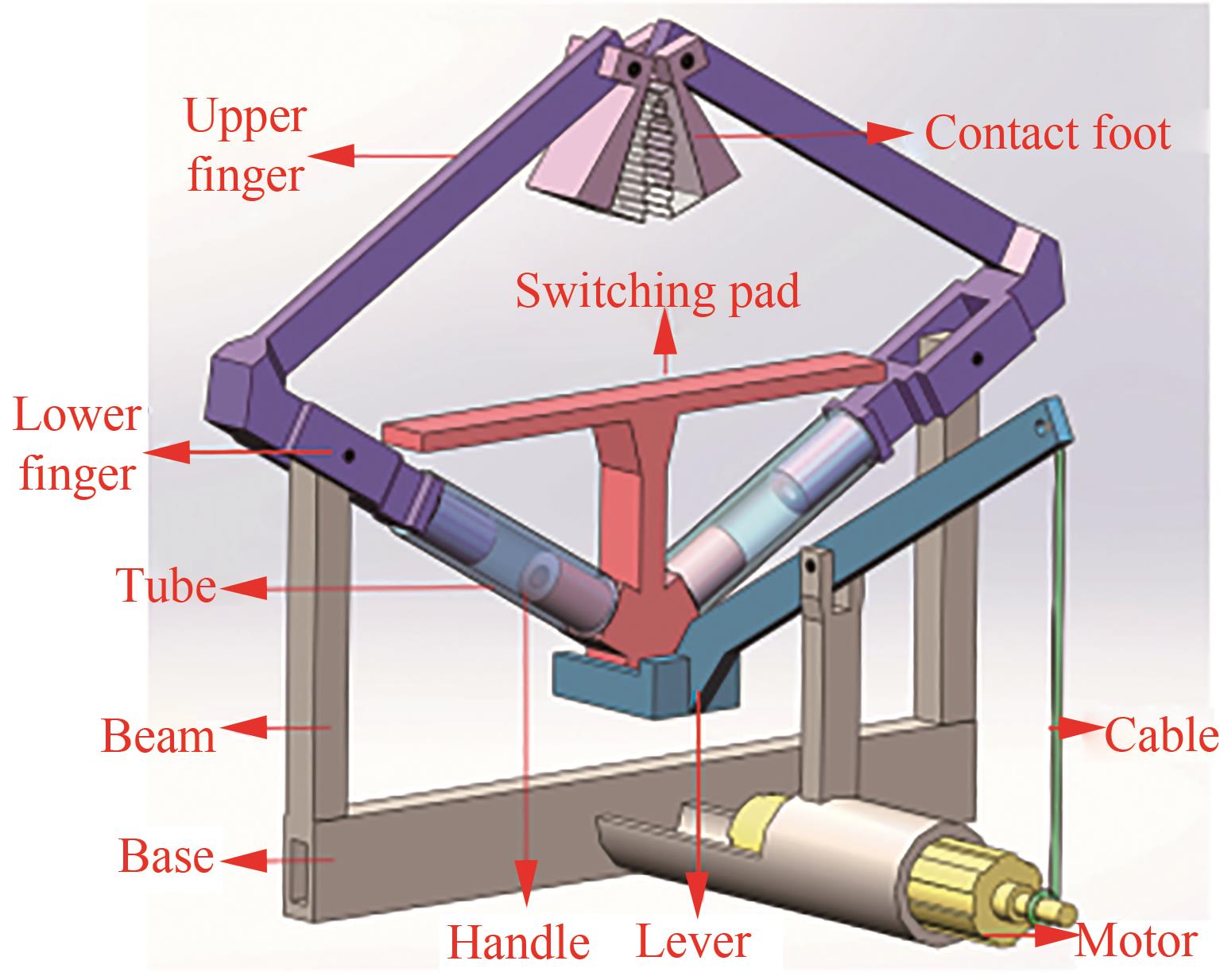

Fig.11
Compliant mechanical grasping mechanism of University of Sydney[16]
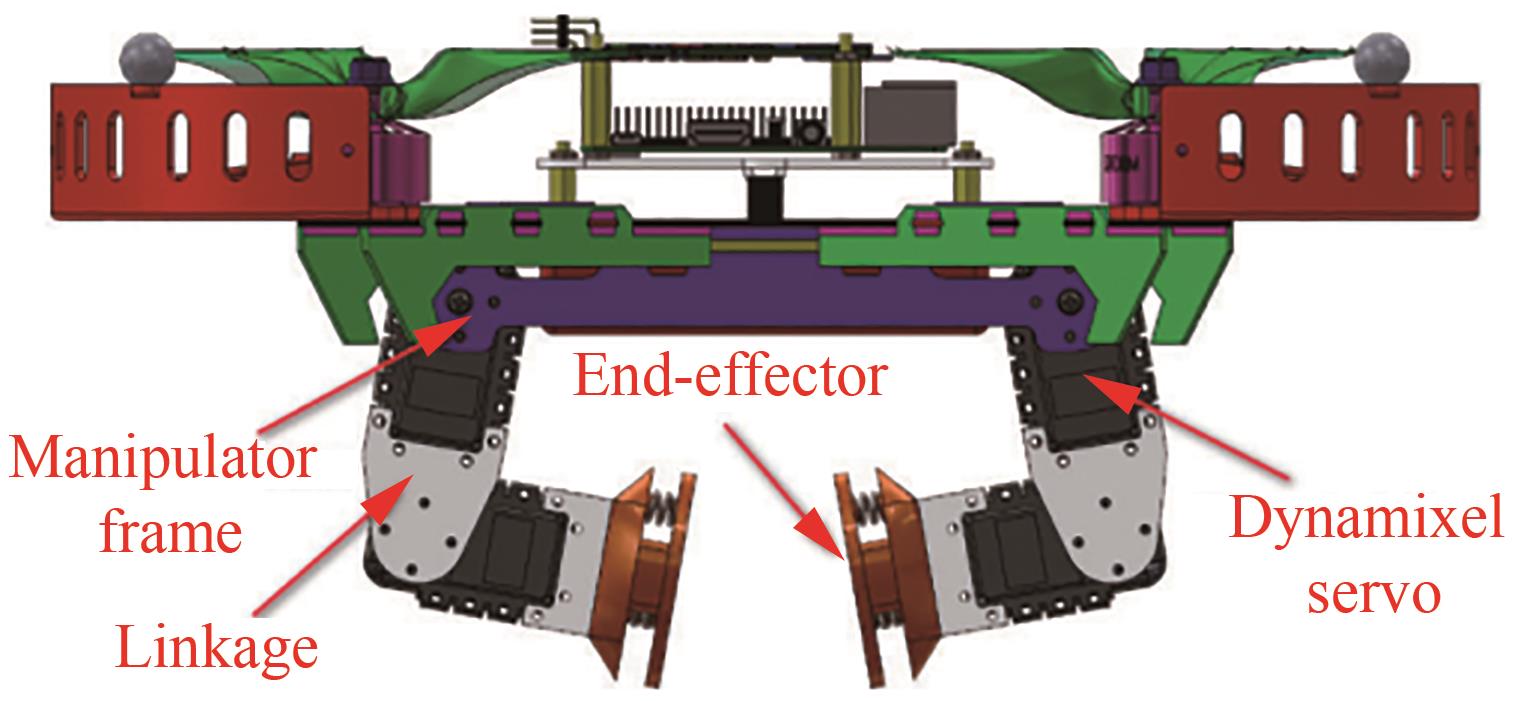

Fig.12
Mechanical grasping mechanism of University of Utah[17]


Fig.13
Mechanical grasping mechanism of Abdur Rahman Crescent Institute of Science and Technology[18]


Fig.14
Perching mechanism of Laboratory of Intelligent Systems,Ecole Polytechnique Fédérale de Lausanne[19]
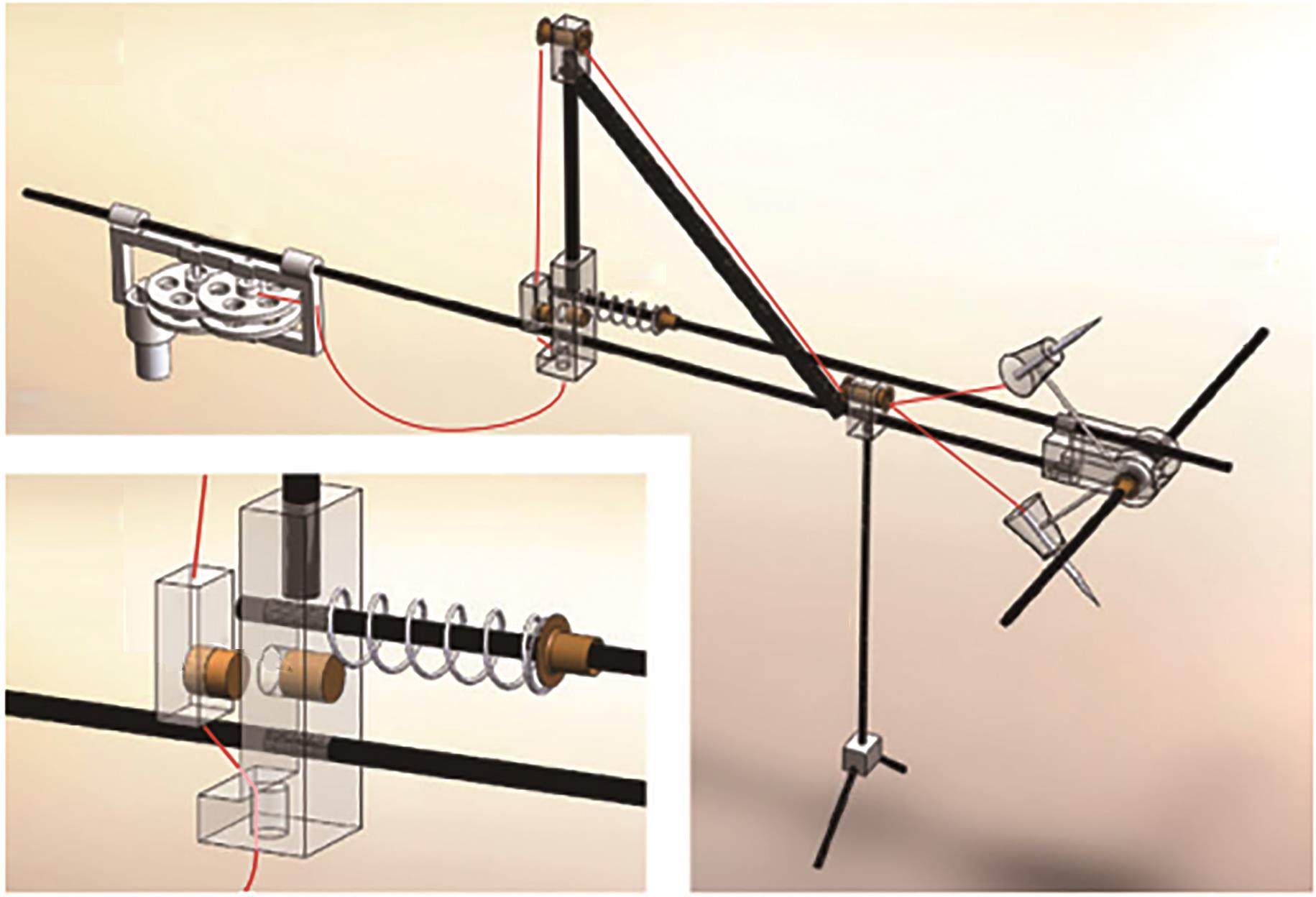

Fig.15
Mechanical grasping mechanism of School of Engineering, École Polytechnique Fédérale de Lausanne[20]


Fig.16
Mechanical grasping mechanism of School of Engineering and Applied Science,Yale University[21]
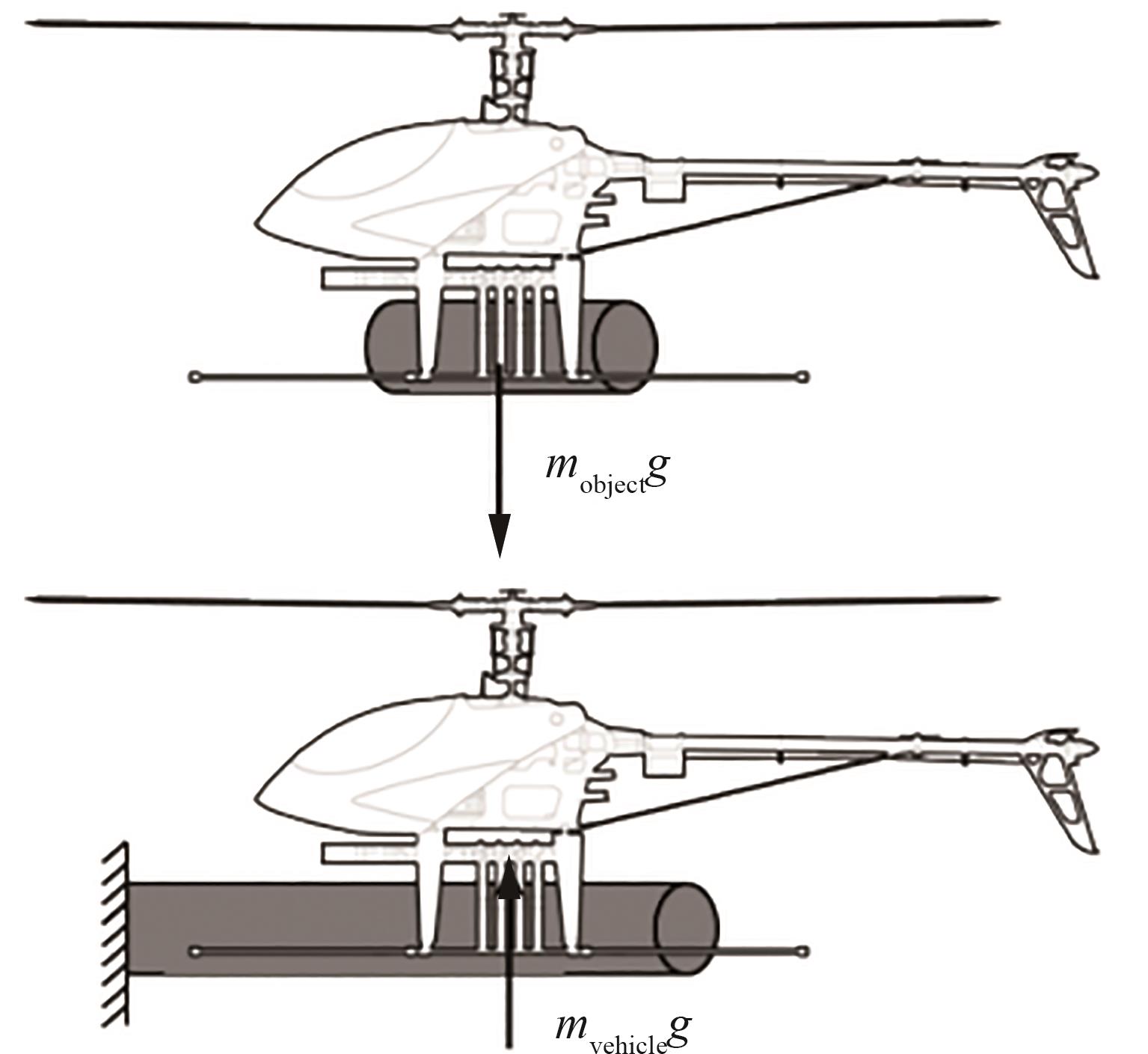

Fig.17
Bird-inspired perching landing gear of University of Manchester[22]
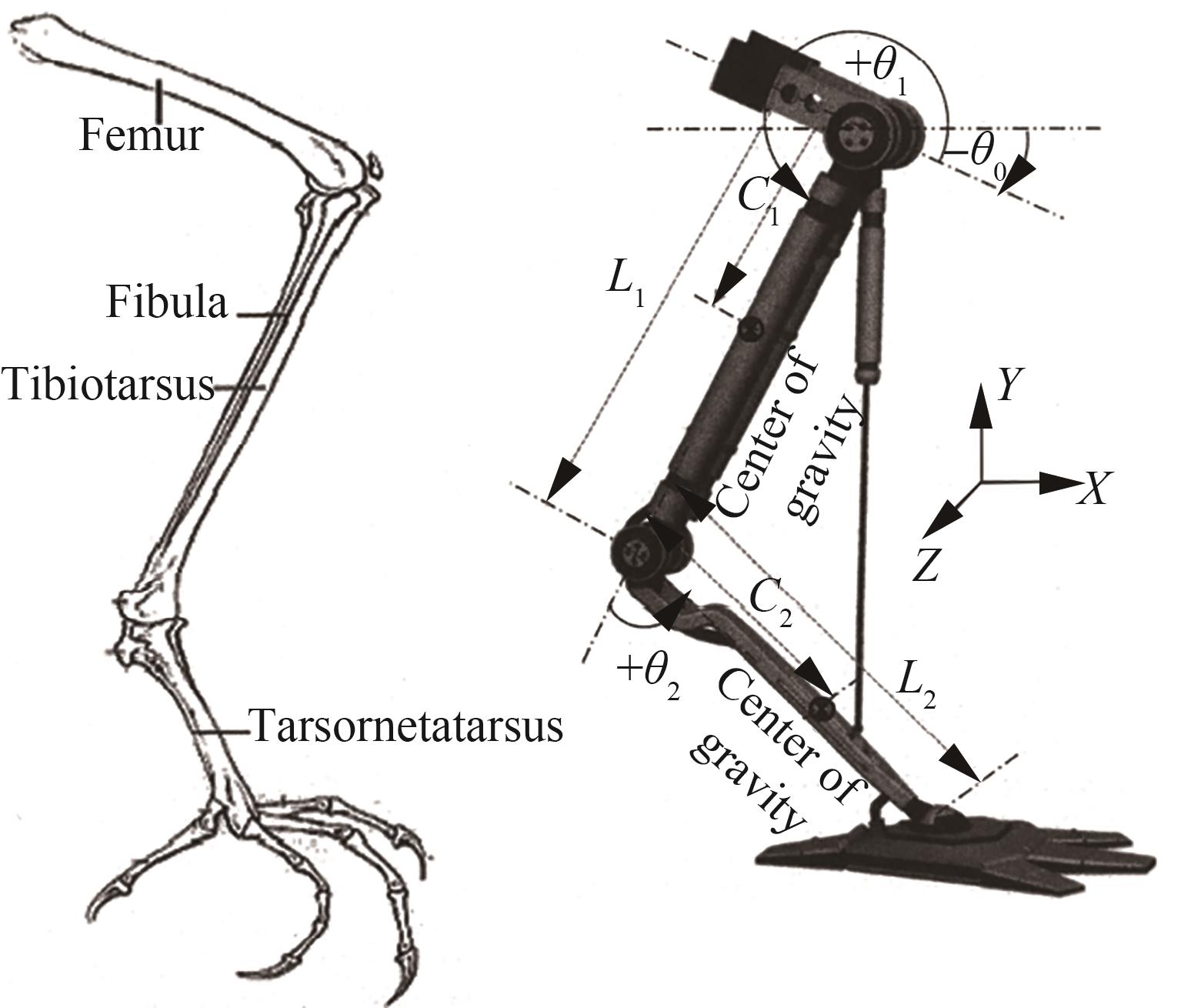

Fig.18
Bio-inspired adaptive perching mechanism of School of Mechanical and Aerospace Engineering,Nanyang Technological University[23]
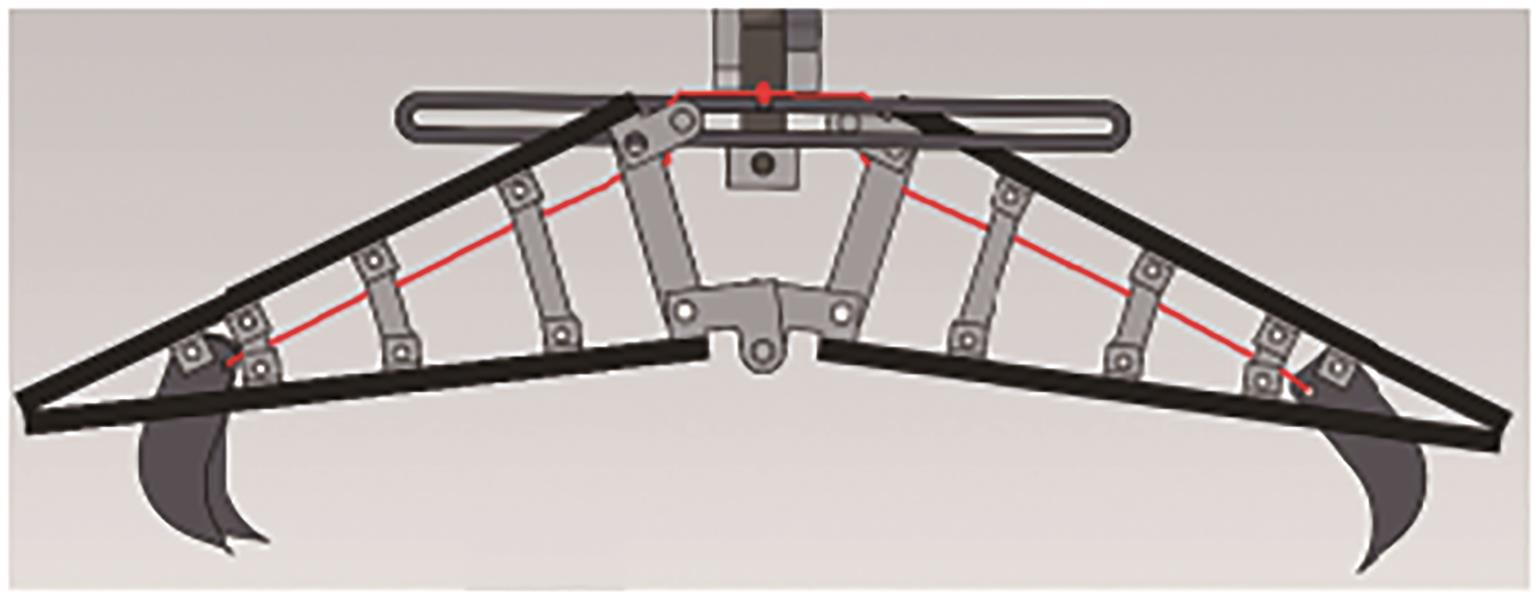

Fig.19
Mechanical grasping mechanism of University of Utah[24]

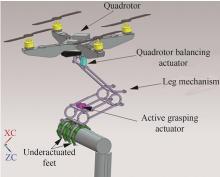
Fig.20
Bio-inspired perching mechanism of New Mexico State University[25]
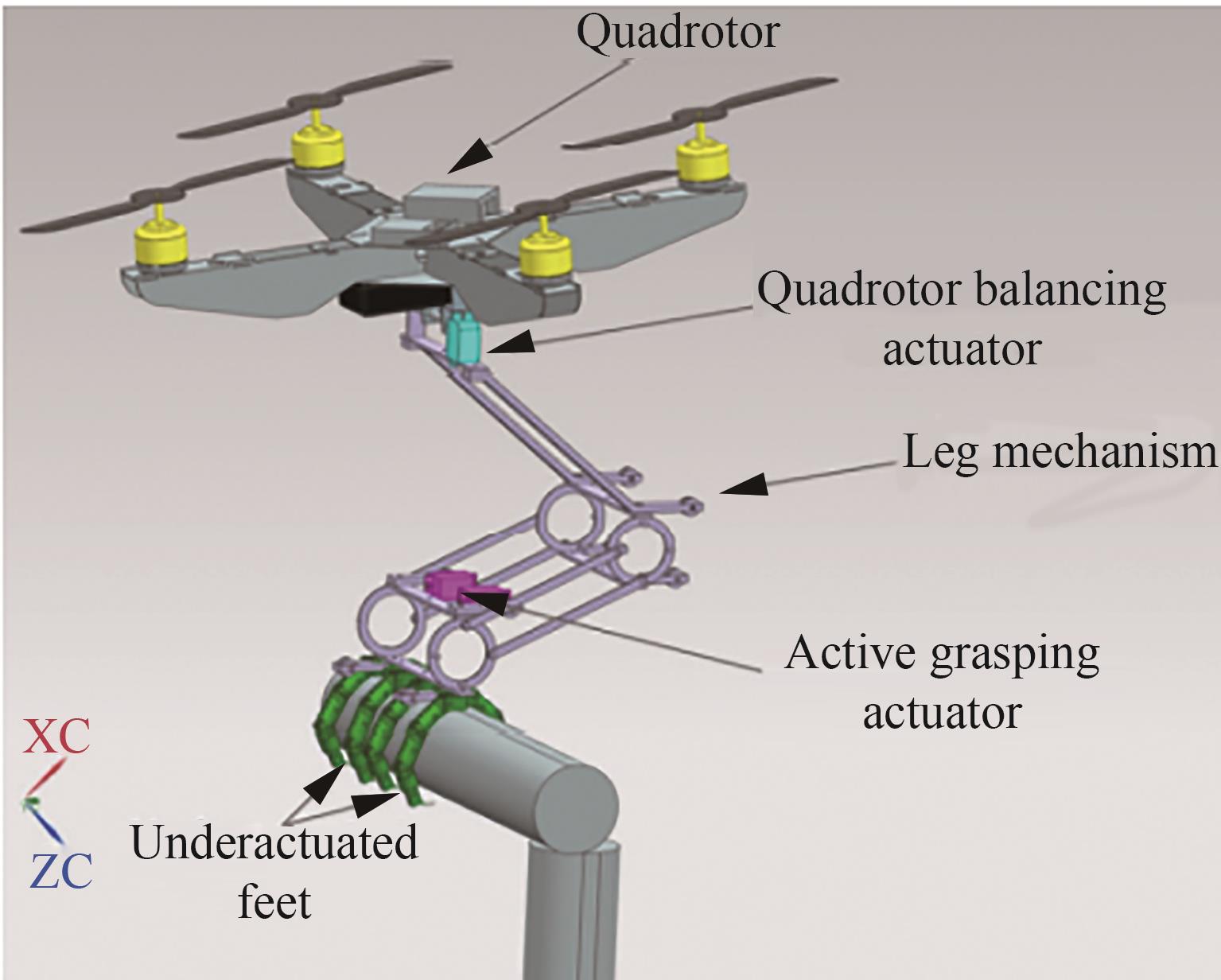

Fig.21
Bird-inspired perching landing gear of Olin College of Engineering[26-27]


Fig.22
Bio-inspired adaptive perching mechanism of New Dexterity Research Group, University of Auckland[28]
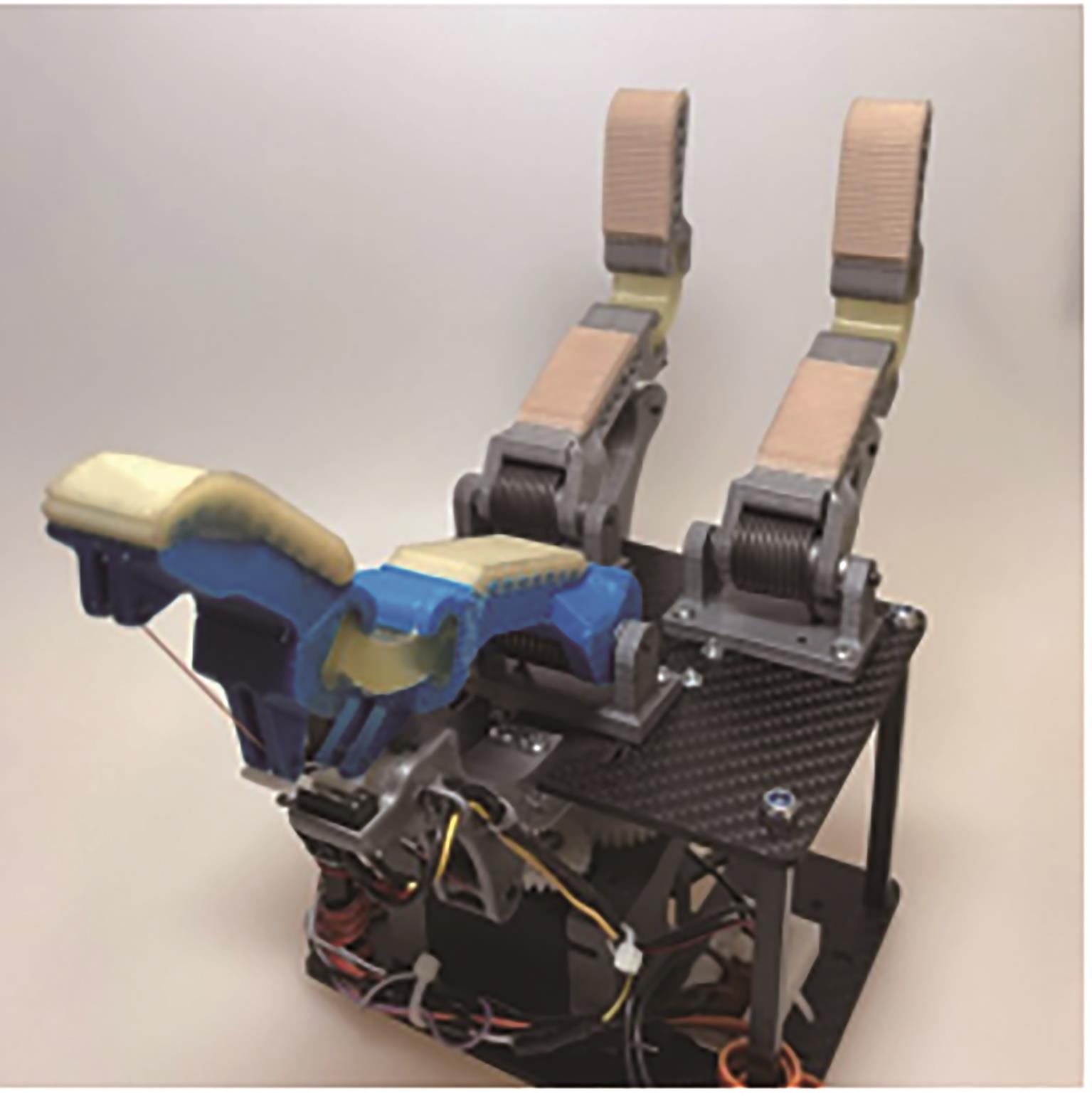
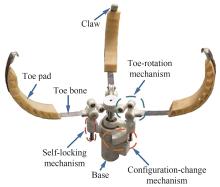
Fig.23
Bird-inspired mechanical grasping mechanism of State Key Laboratory of Mechanical Transmission,Chongqing University[29]


Fig.24
Mechanical grasping mechanism of Department of Mechanical Engineering,Stanford University[30]

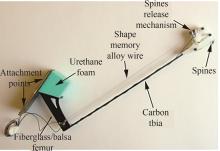
Fig.25
Bird-inspired perching landing gear of Stanford University[34-37]


Fig.26
Bionic dart perching mechanism of Florida State University College of Engineering[38]
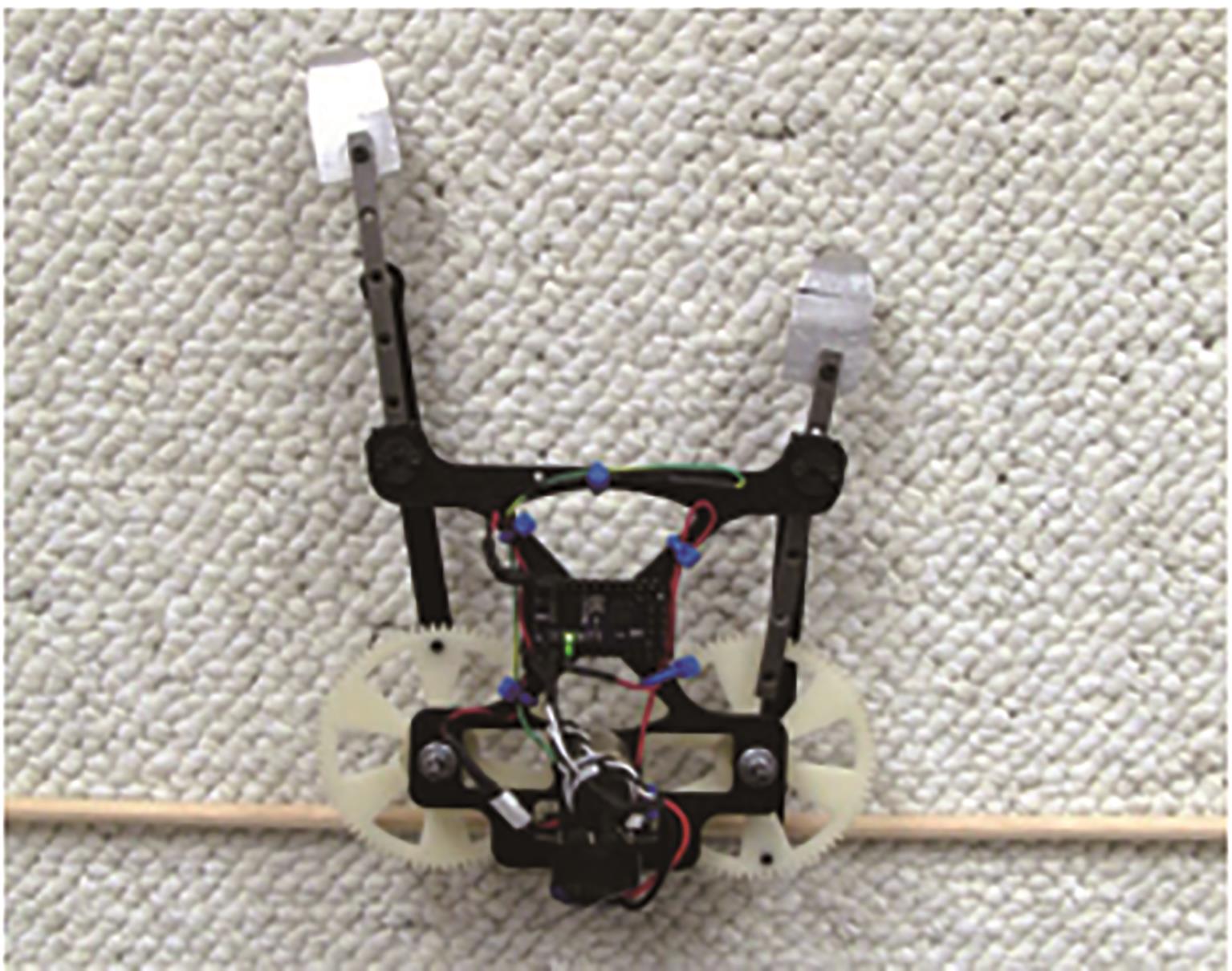

Fig.27
Mechanical grasping mechanism of University of Sherbrooke[39-40]
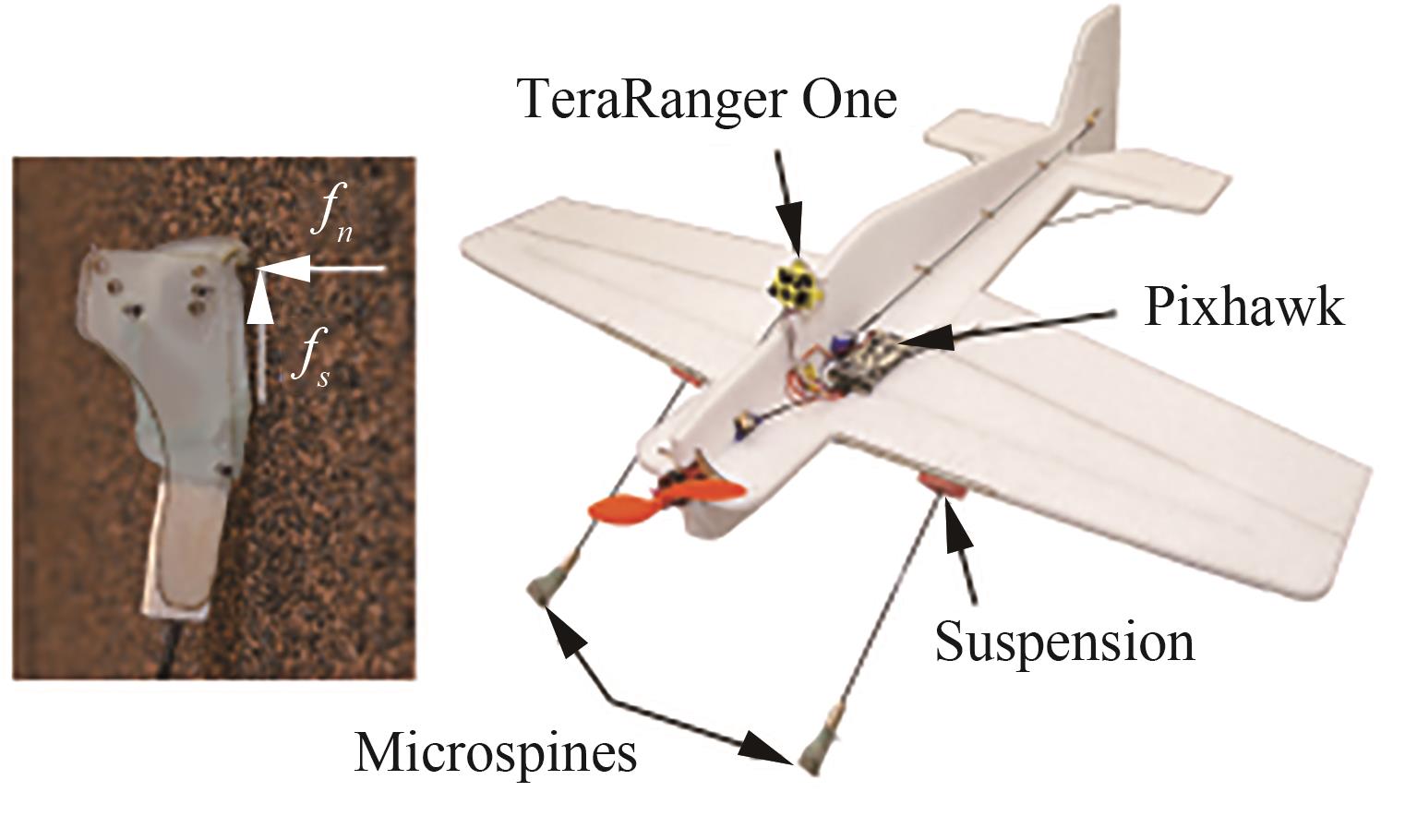

Fig.28
Bionic feet of Department of Mechanical Engineering,Stanford University [41-42]


Fig.29
Bionic dart perching mechanism of Imperial College London[43]

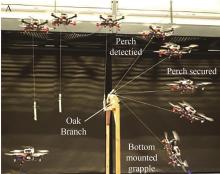
Fig.30
Mechanical grasping mechanism of Aerial Robotics Laboratory,Imperial College London[44]
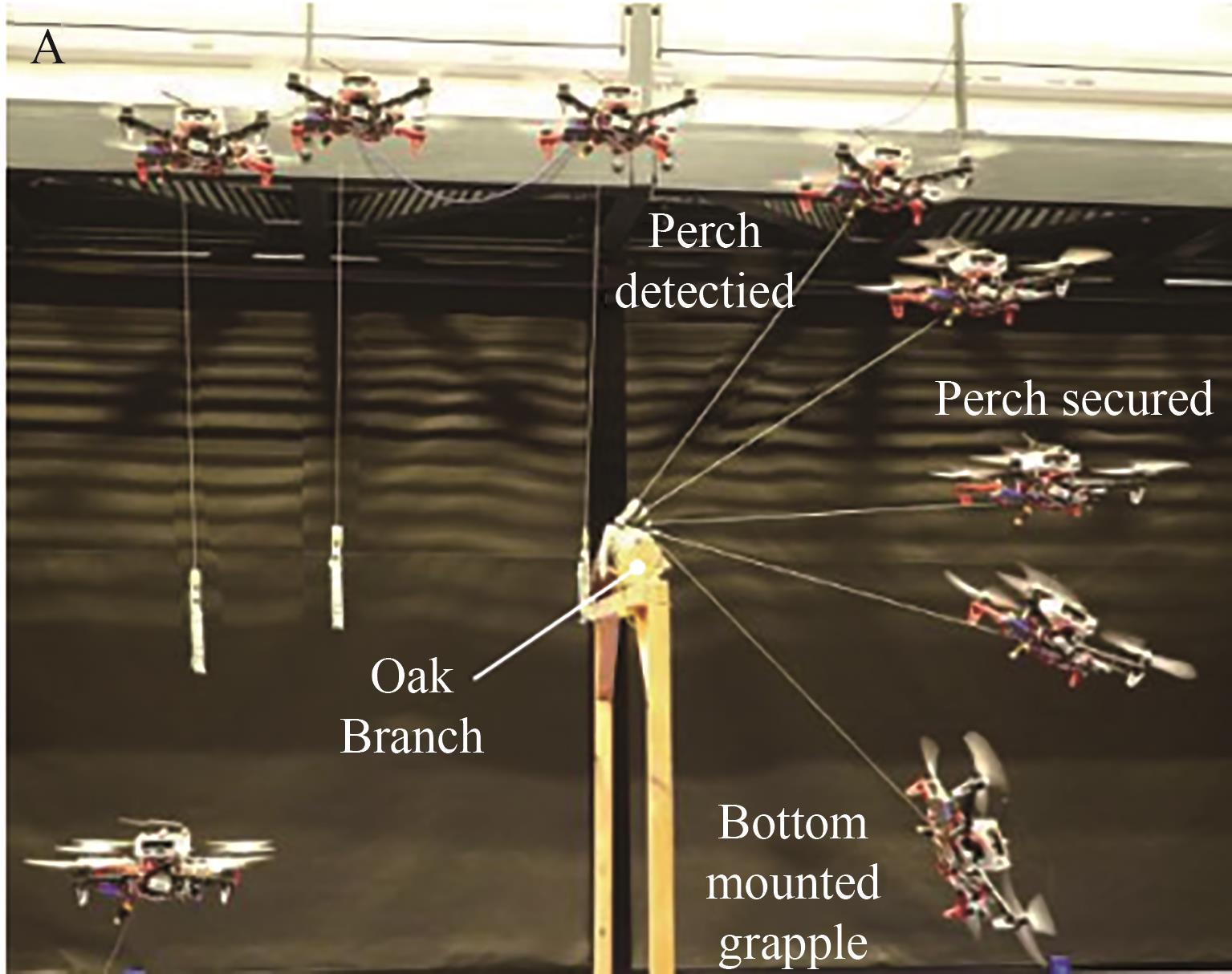

Fig.31
Mechanical grasping mechanism of Jet Propulsion Laboratory,California Institute of Technology[45]
Fig.32
Vacuum cup of Department of Computer Science and Technology,Nanjing University of Science and Technology[46]


Fig.33
Vacuum cup of University of Twente[47]


Fig.34
Vacuum cup of School of Information Science,Japan Advanced Institute of Science and Technology[48]
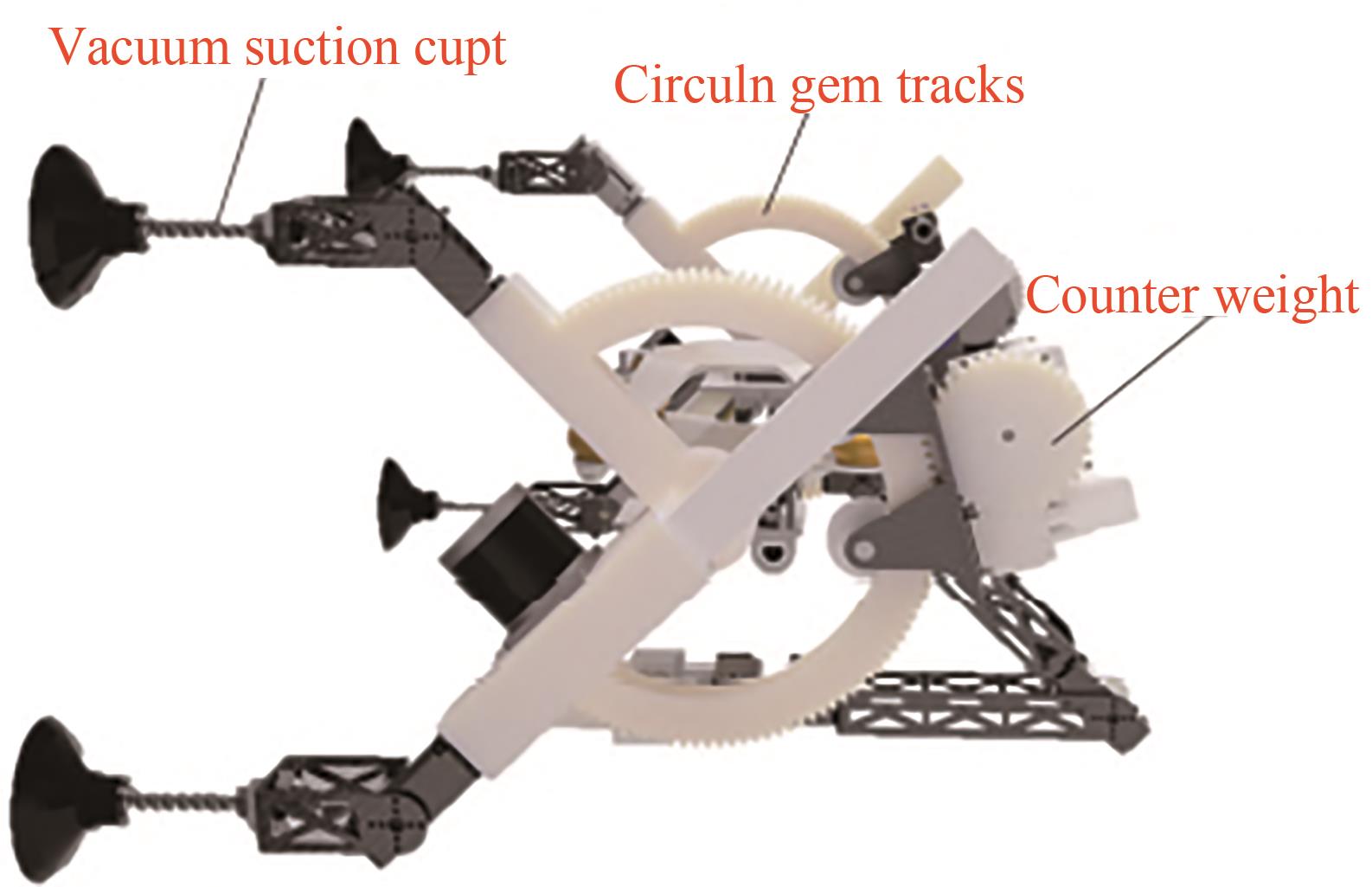

Fig.35
Vacuum cup of School of Mechanical and Engineering,Shanghai Jiao Tong University [49-50]

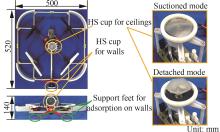
Fig.36
Vacuum cup of Department of Systems and Control Engineering,Tokyo Institute of Technology[51]
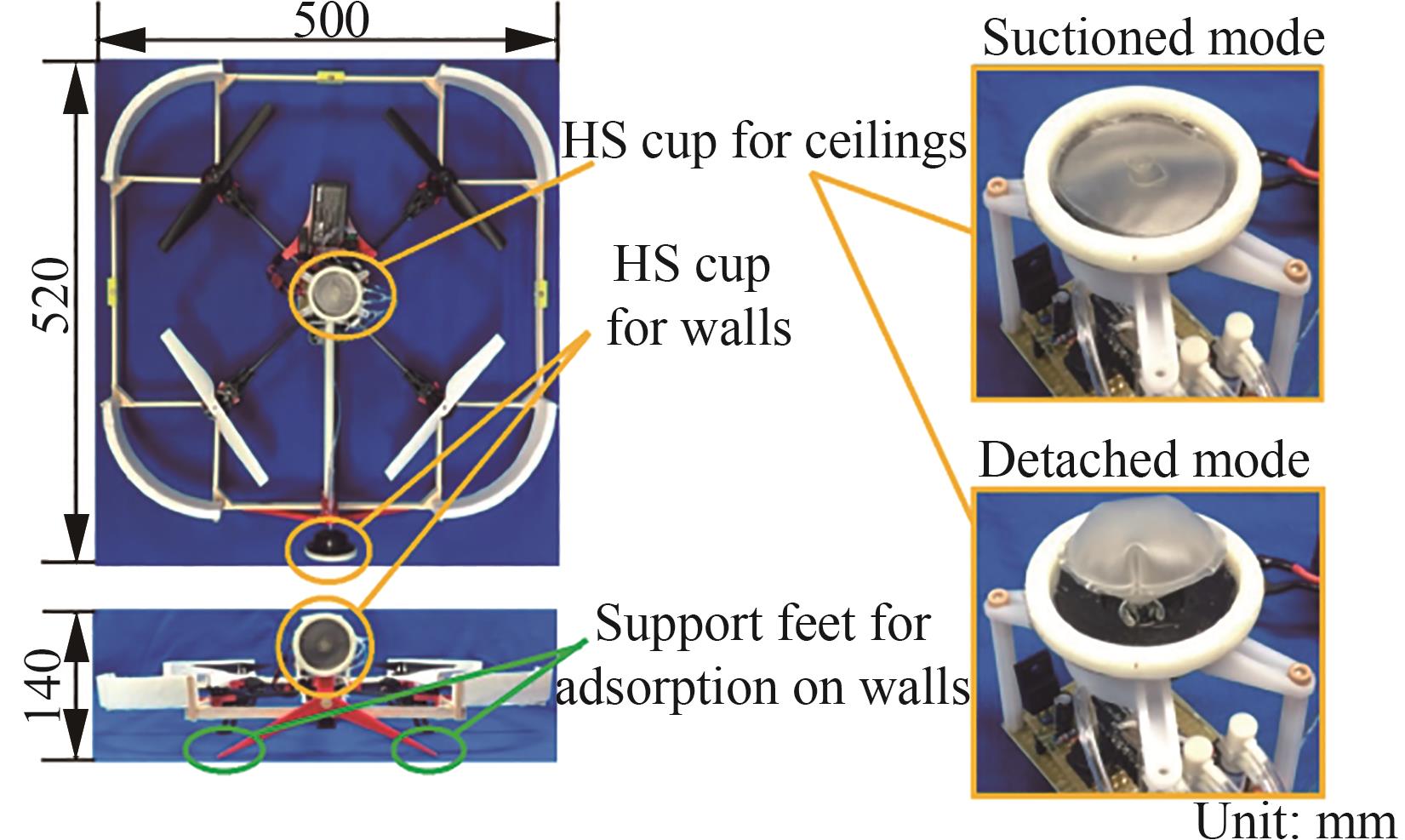
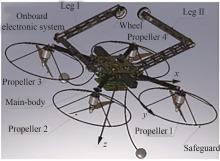
Fig.37
Wall-climbing robot of School of Mechanical Engineering and Automation,Beihang University [53-54]
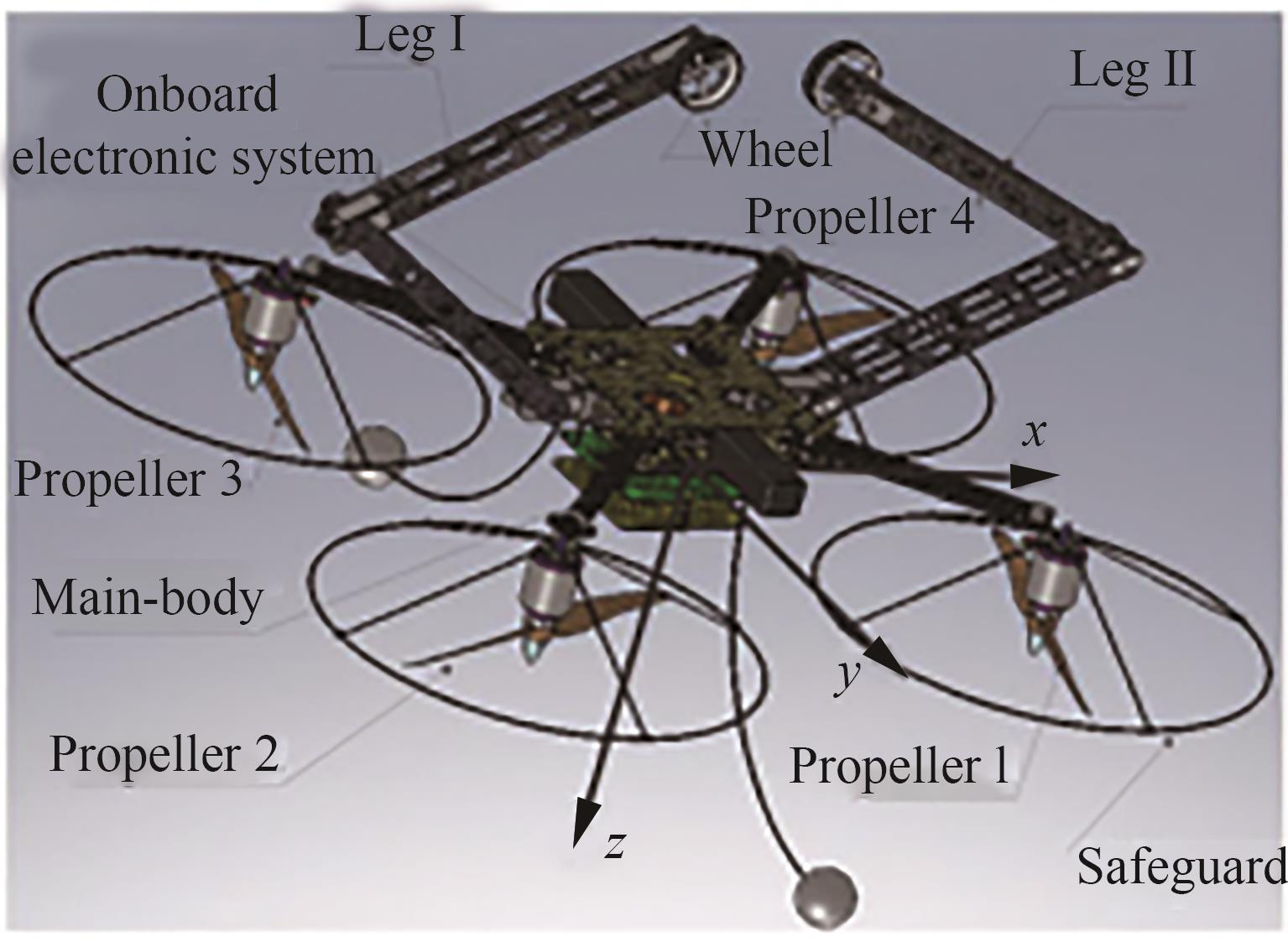
Fig.38
Wall-climbing robot of Shin, et al. of Korea Advanced Institute of Science and Technology(KAIST)[55]
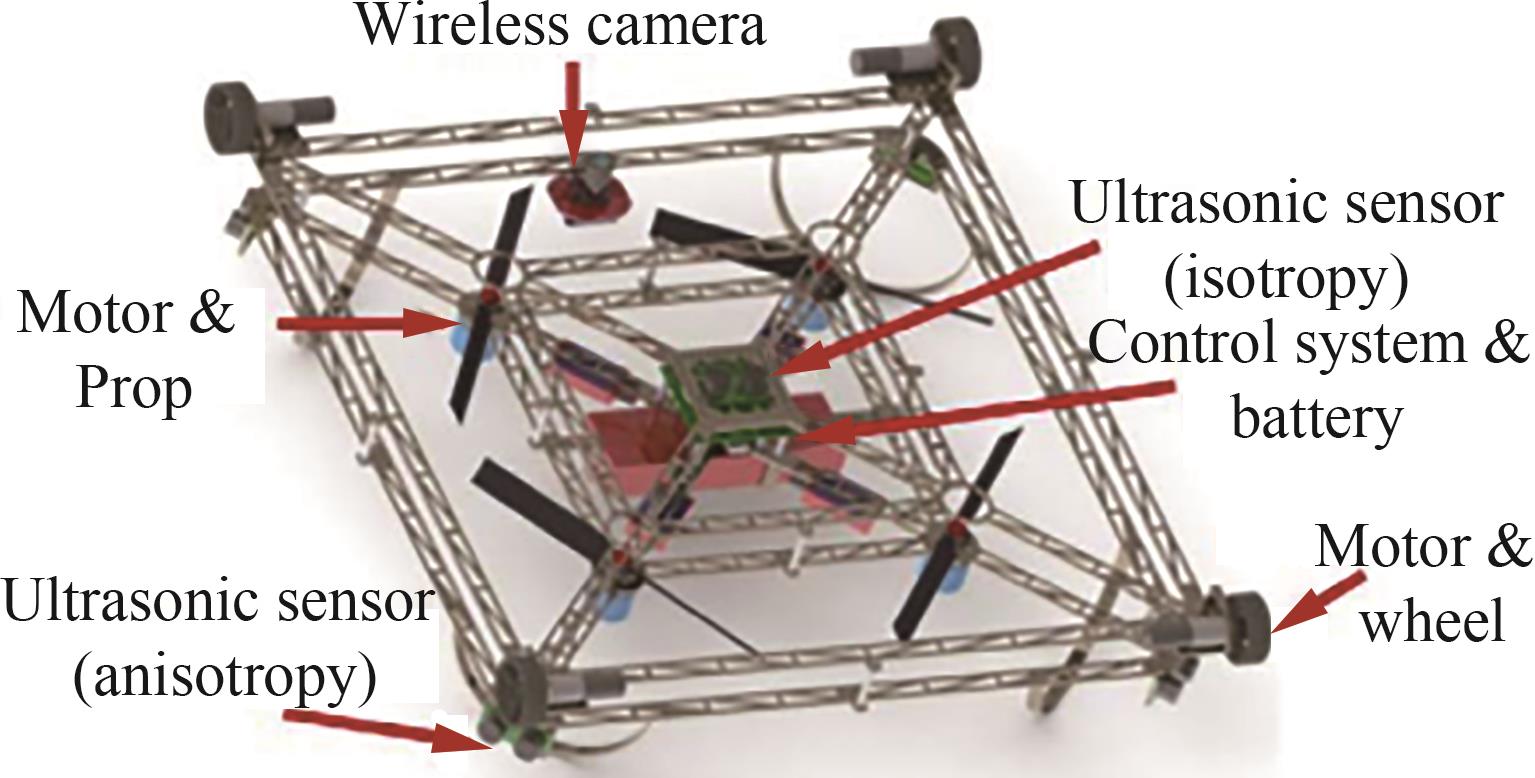

Fig.39
Wall-climbing robot of Department of Civil and Environmental Engineering,KAIST[56-57]
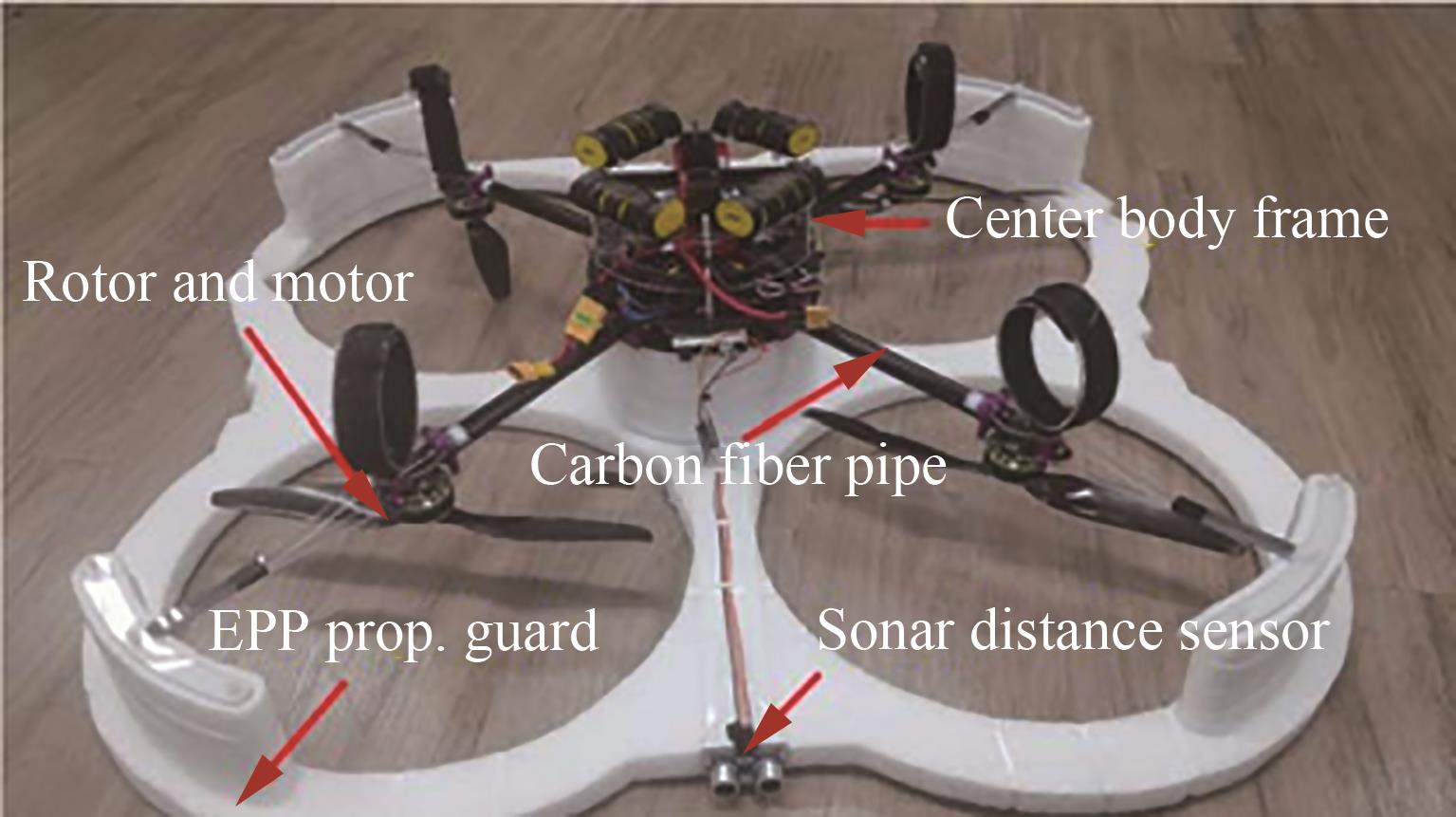

Fig.40
Wall-climbing robot of Fujitsu Limited[58]
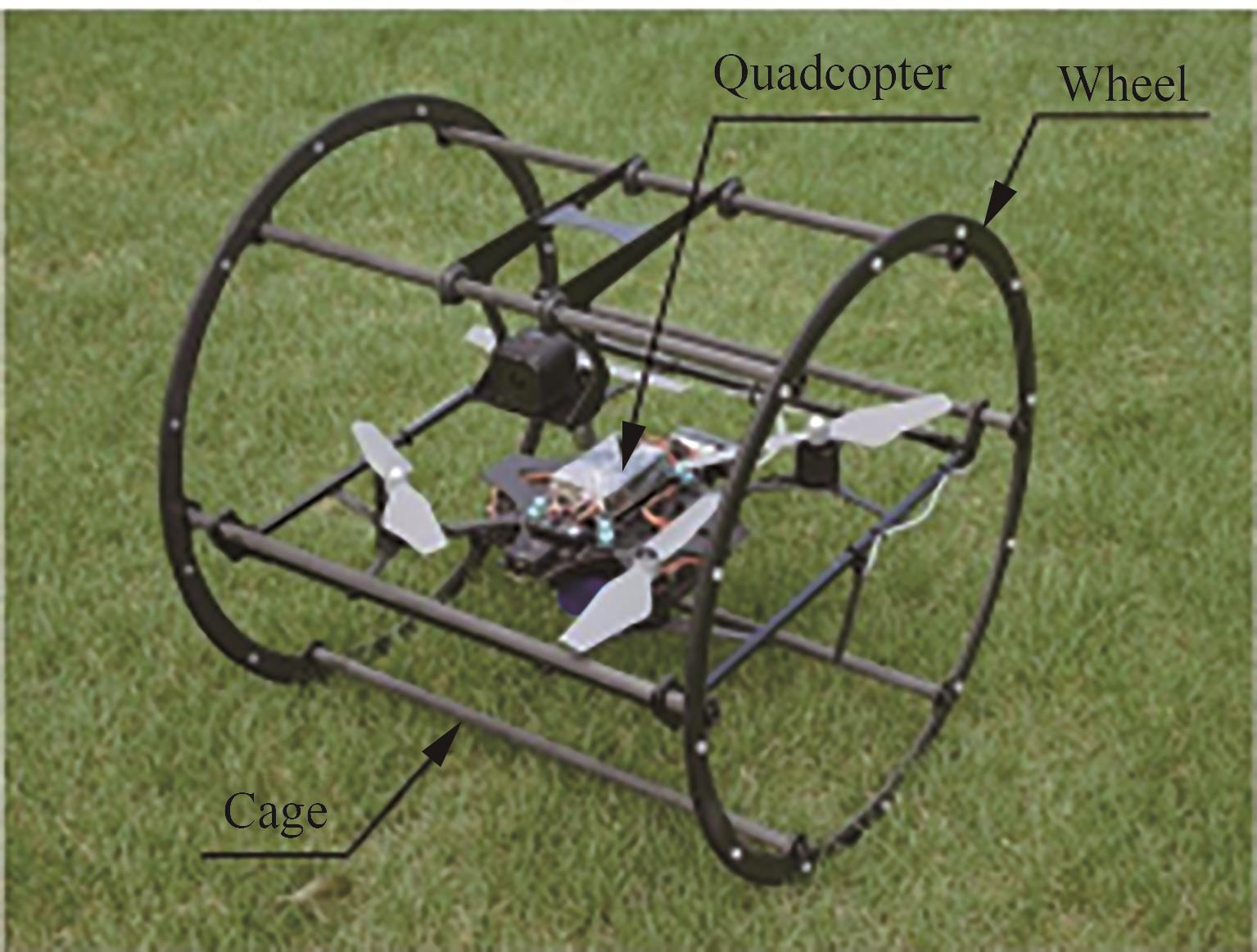

Fig.41
Wall-climbing robot of National Institute of Technology,Ariake College[59]
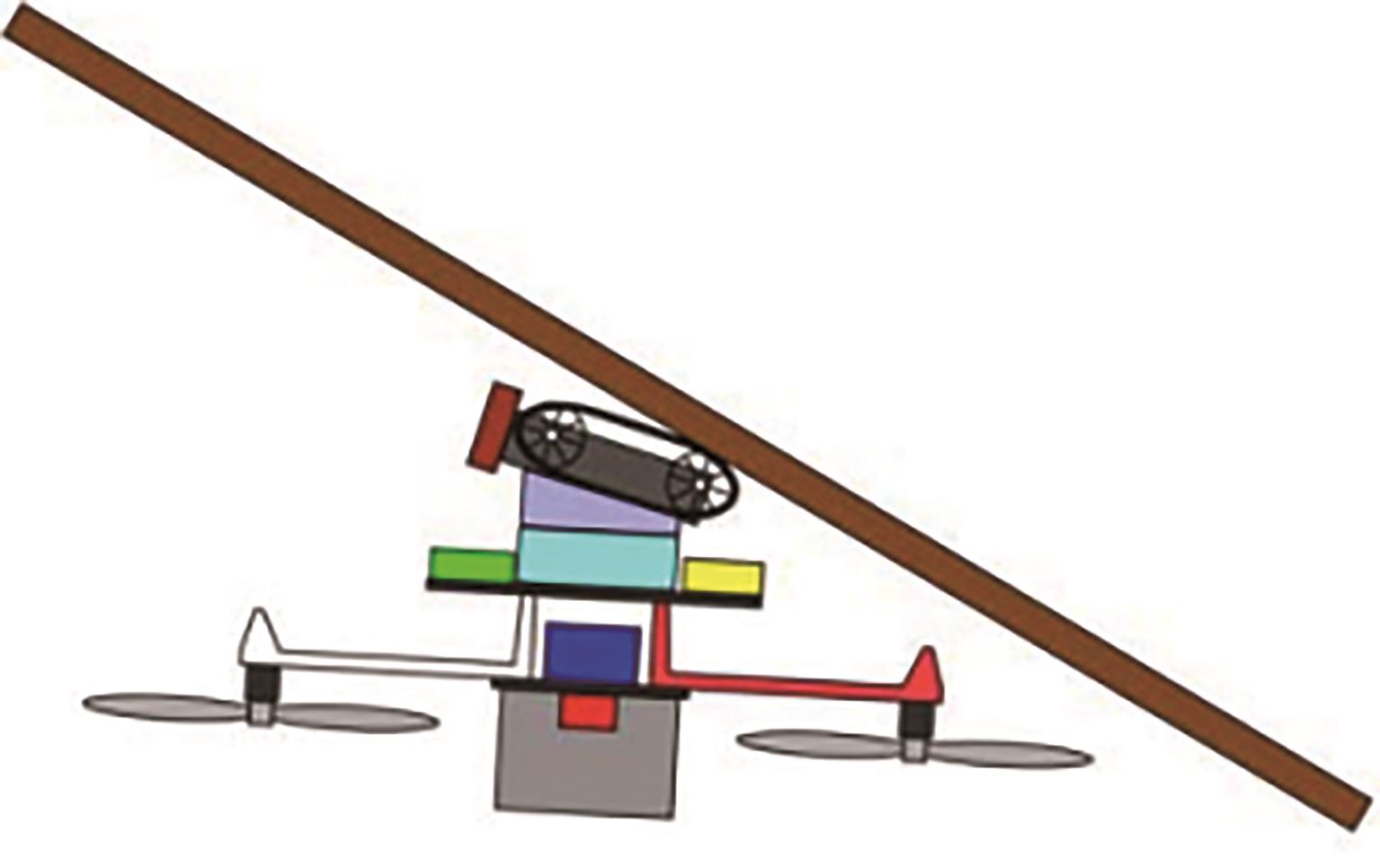
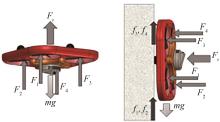
Fig.42
Wall-climbing robot of Jung, et al. of Korea Advanced Institute of Science and Technology[60]
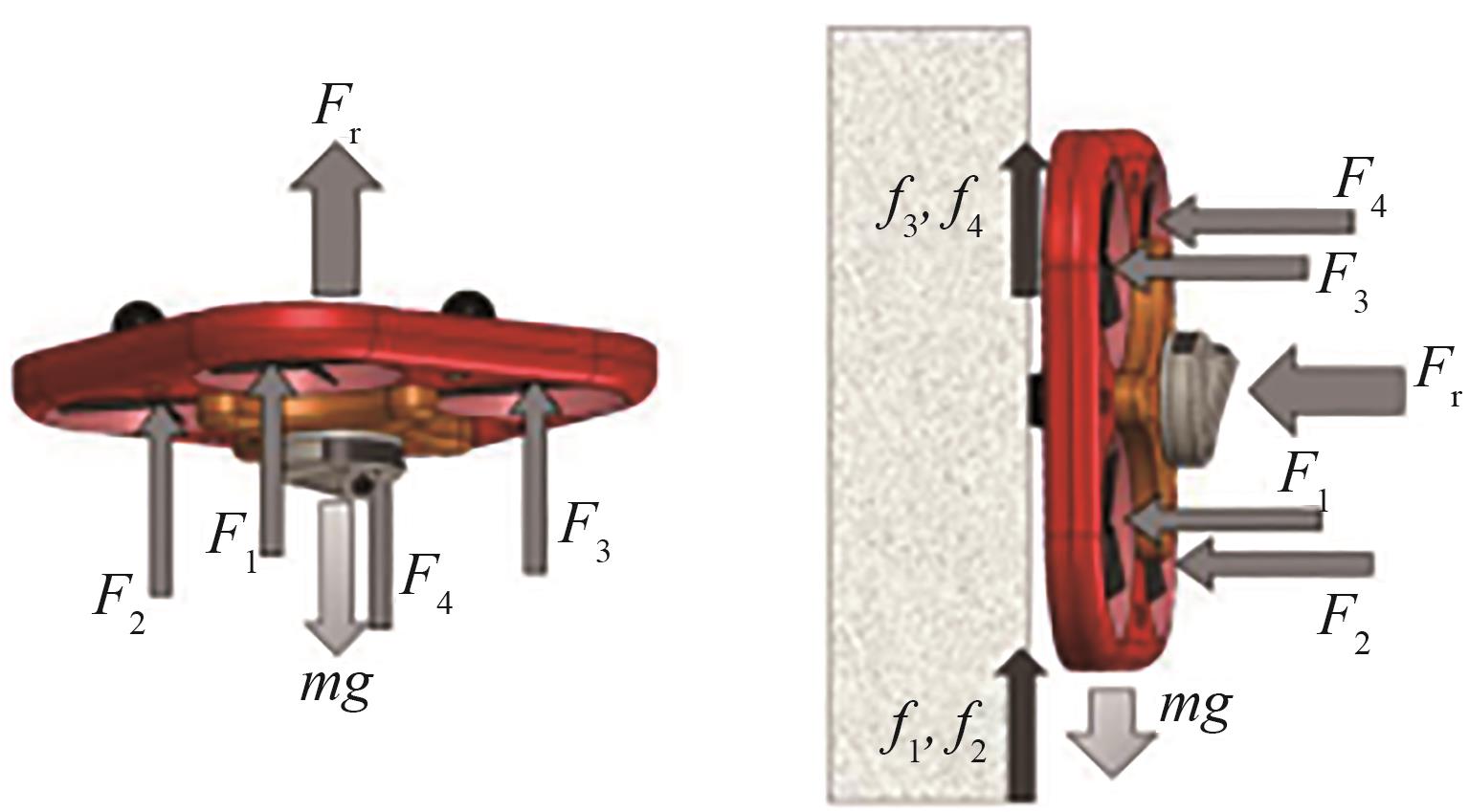

Fig.43
Wall-climbing robot of Department of Science and Engineering,Waseda University[61]


Fig.44
New wall-climbing robot of Department of Civil and Environmental Engineering,KAIST[62]
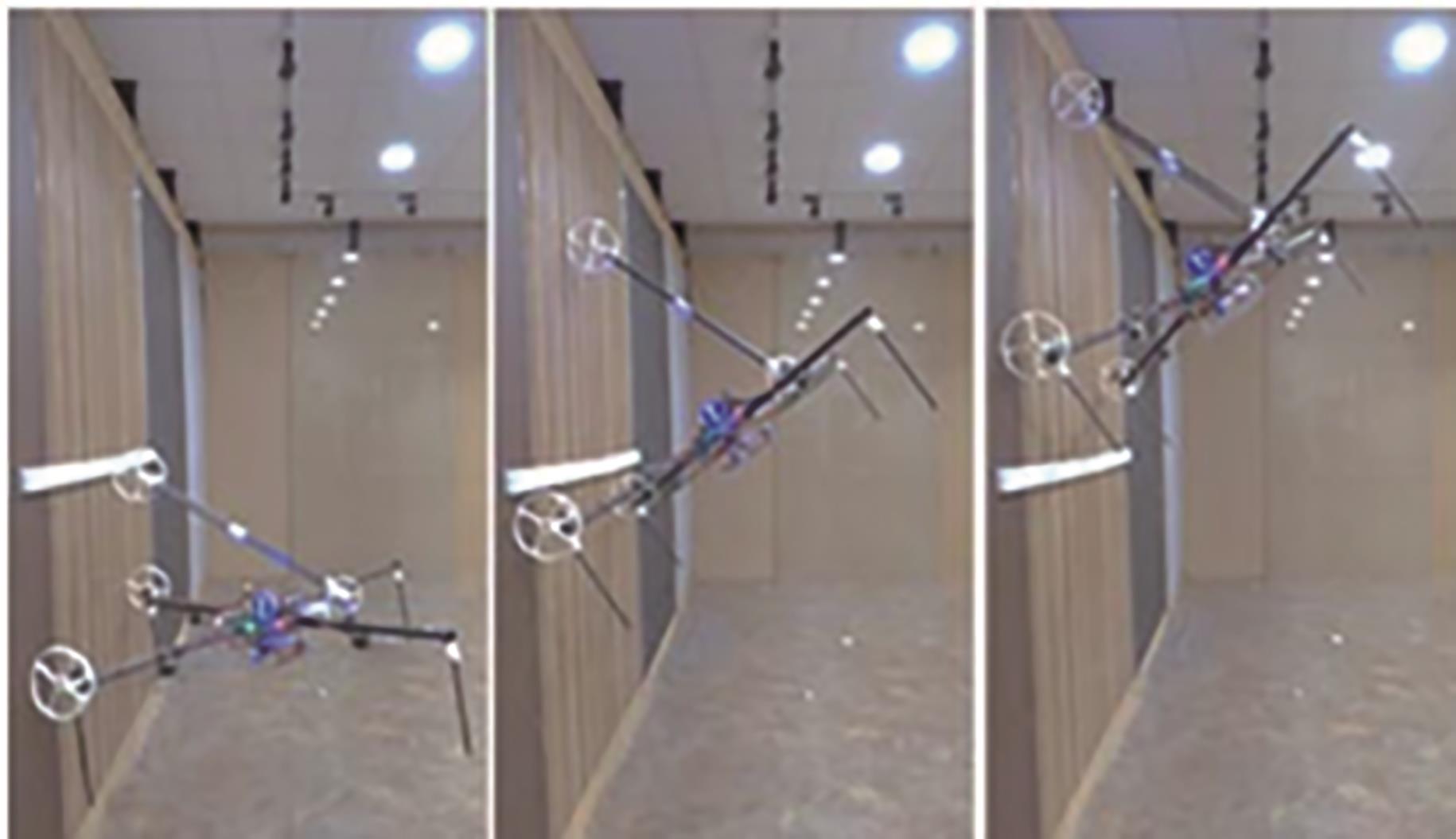

Fig.45
Wall-climbing robot of Graduate School of Natural Science and Technology,Okayama University[63]
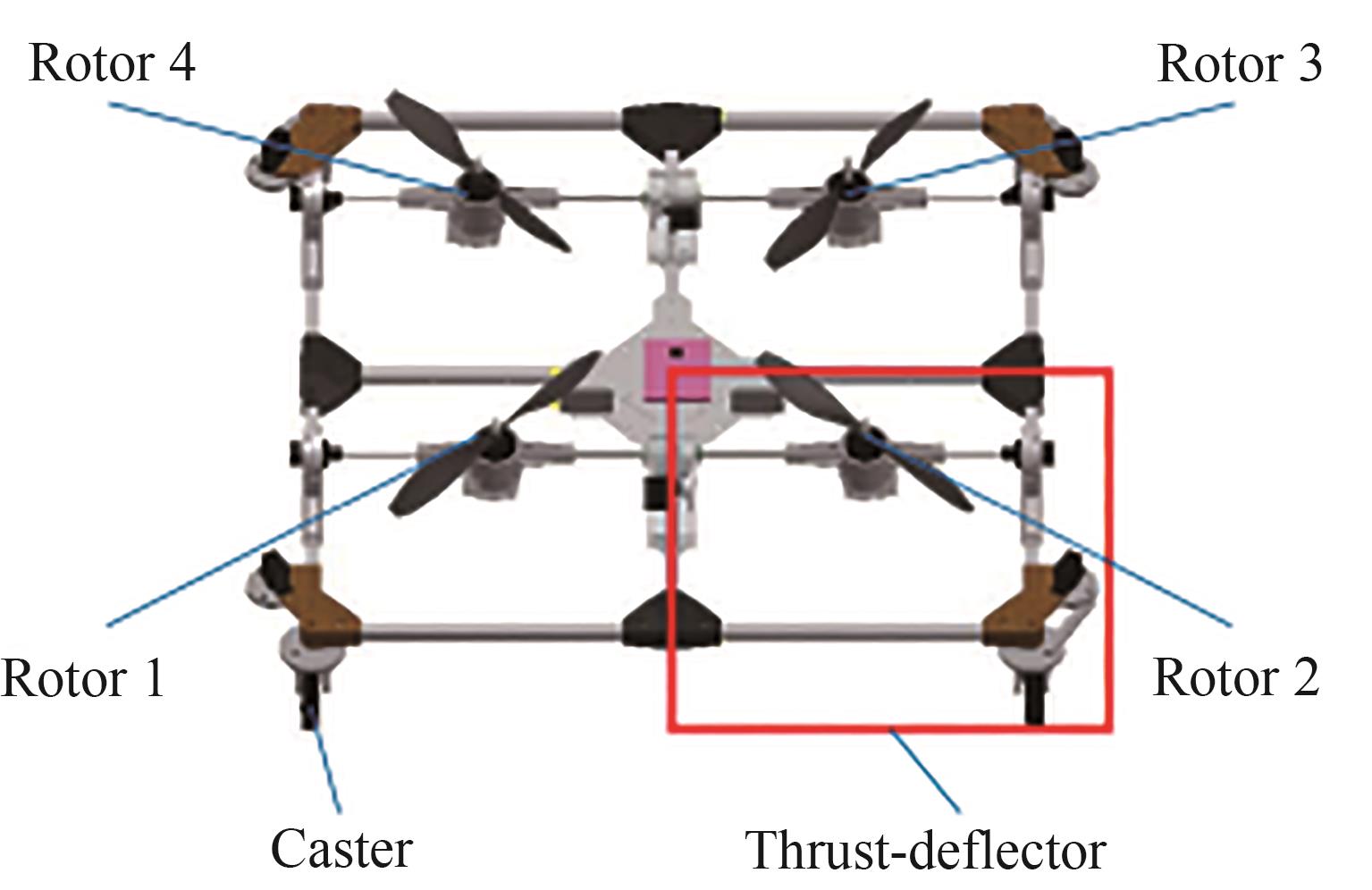
Fig.46
Wall-climbing robot of Lulea University of Technology[64]
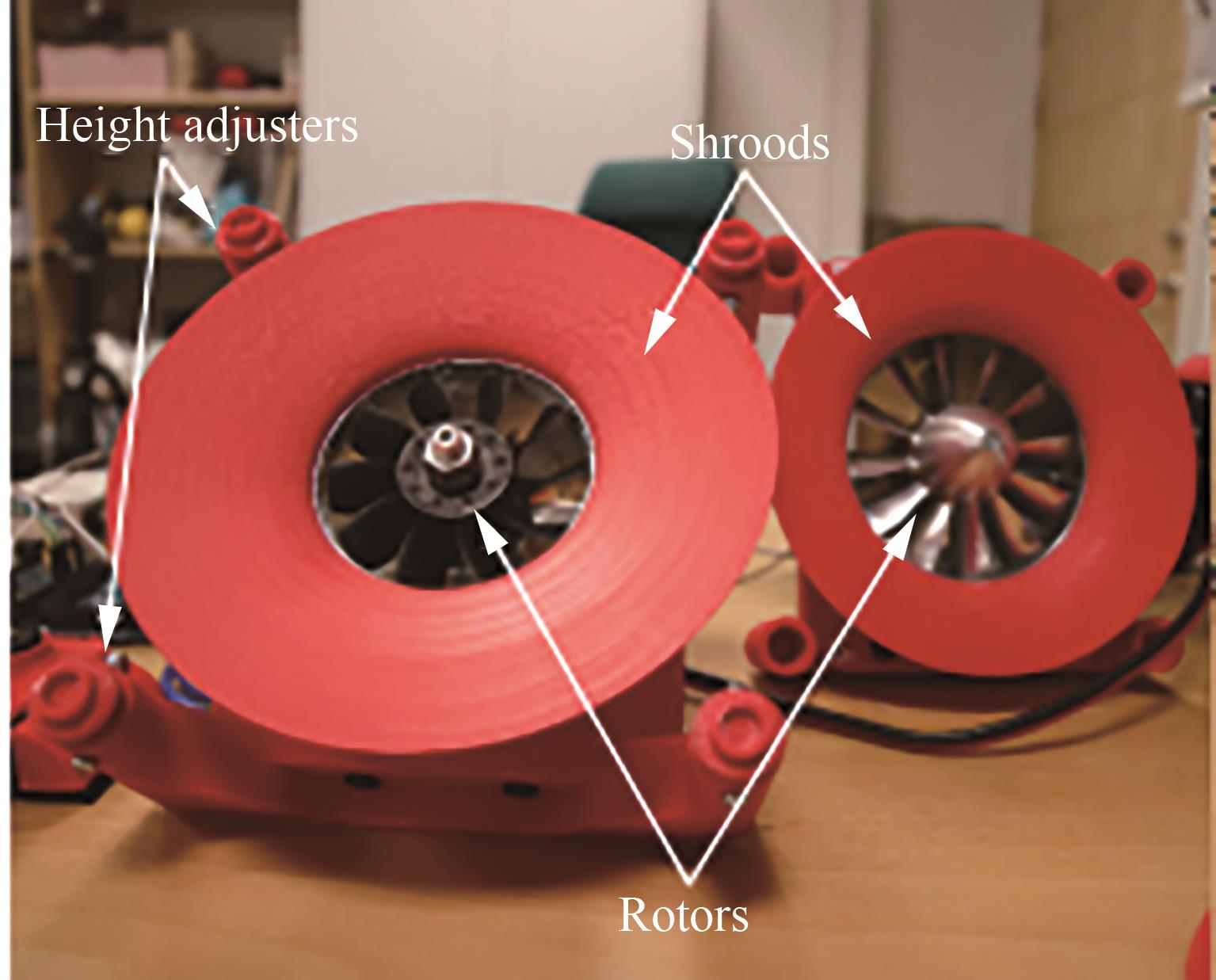

Fig.47
Wall-climbing robot of Graduate School of Science and Engineering,Ehime University[65]


Fig.48
Wall-climbing robot of Urban Robotics Laboratory, KAIST[66]

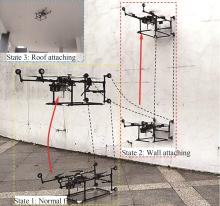
Fig.49
Wall-climbing robot of Jiangsu Key Laboratory of Engineering Mechanics,Southeast University[67]
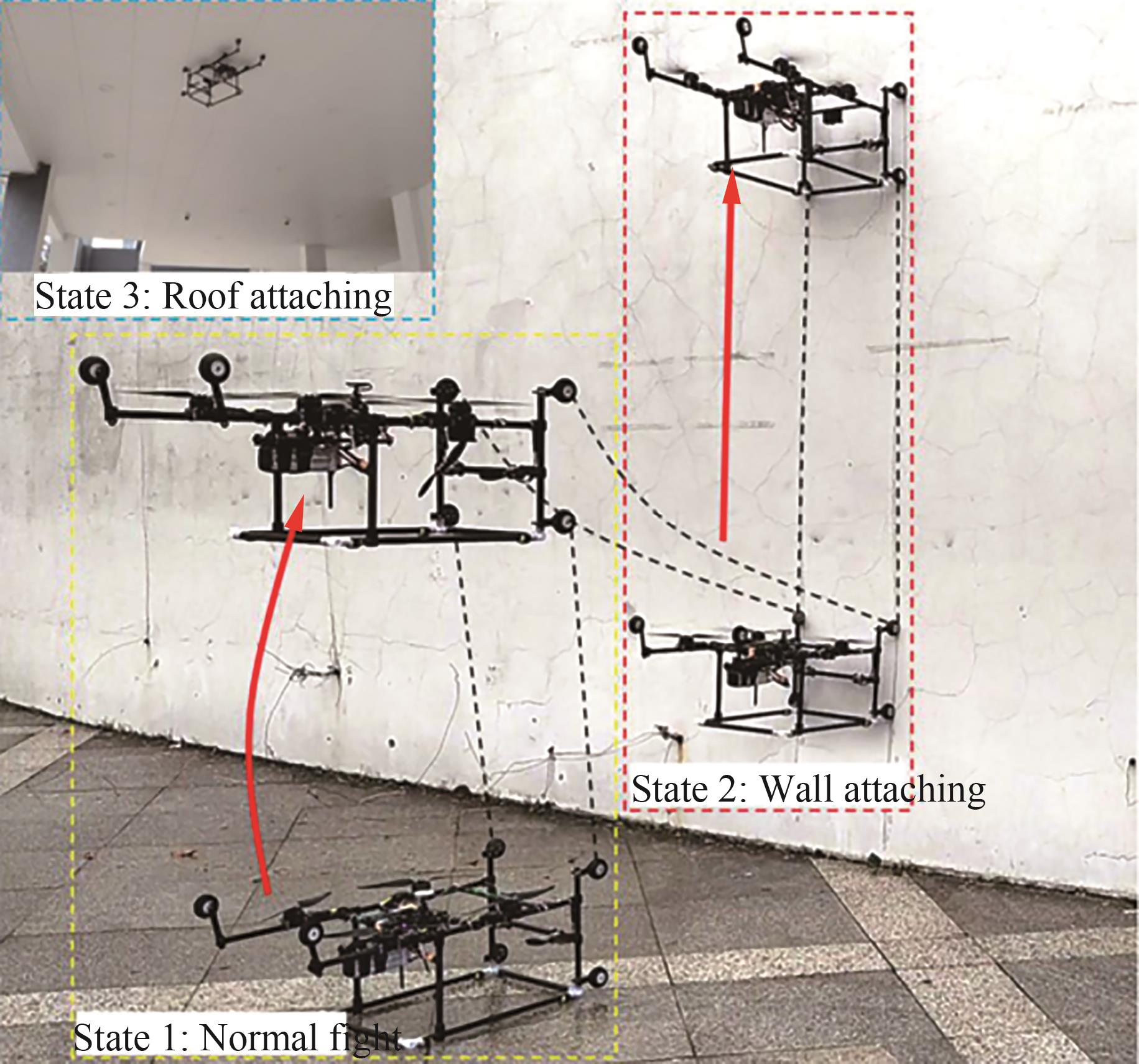
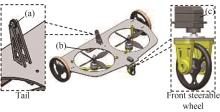
Fig.50
Wall-climbing robot of Department of Mechanical Engineering,University of Technology,Baghdad[68]

Fig.51
Wall-climbing robot of Department of Mechanical Engineering at the Ben Gurion University of the Negev[69]
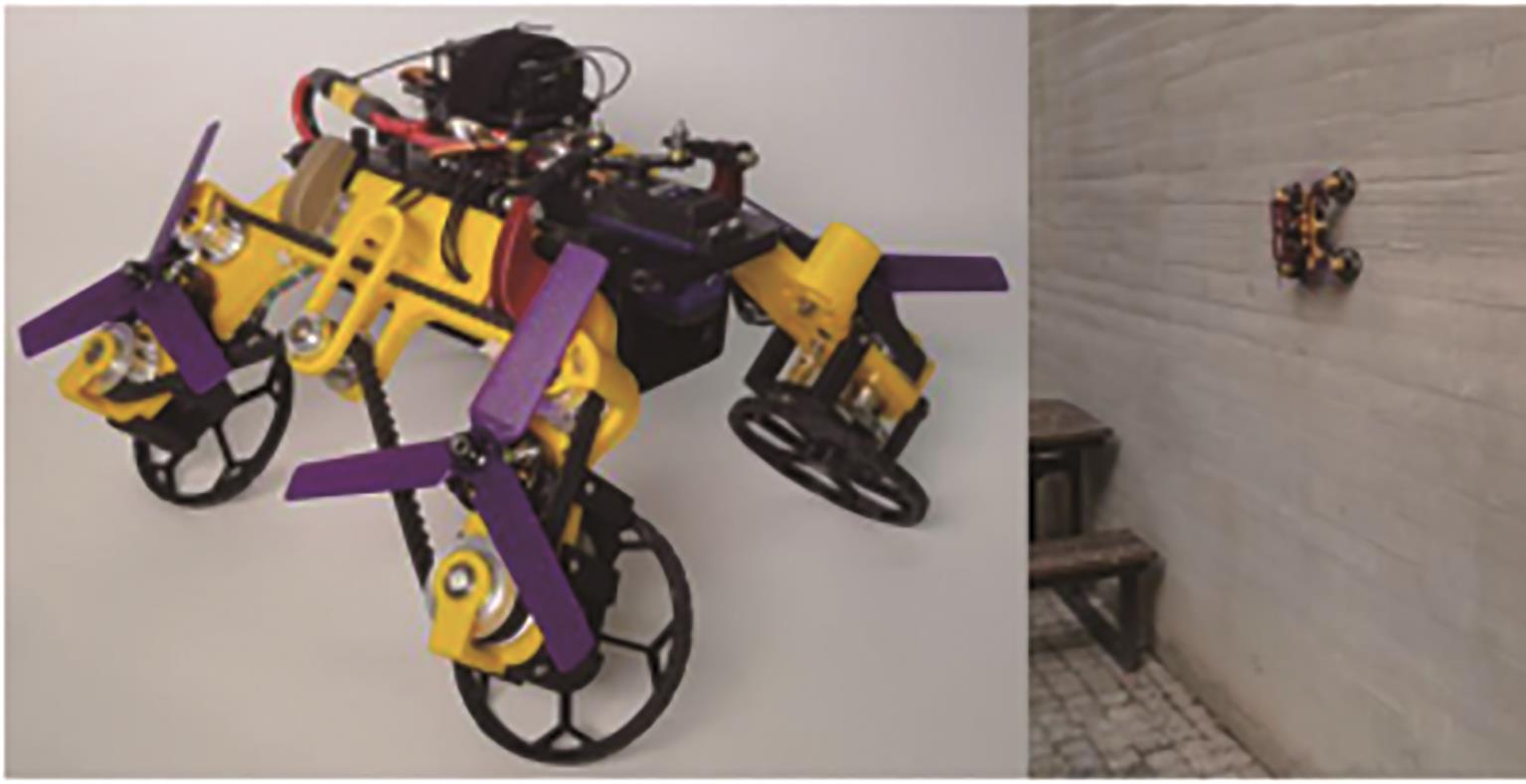
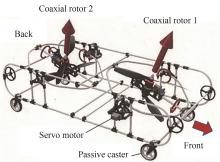
Fig.52
Wall-climbing robot of Graduate School of Natural Science and Technology,Okayama University[70]
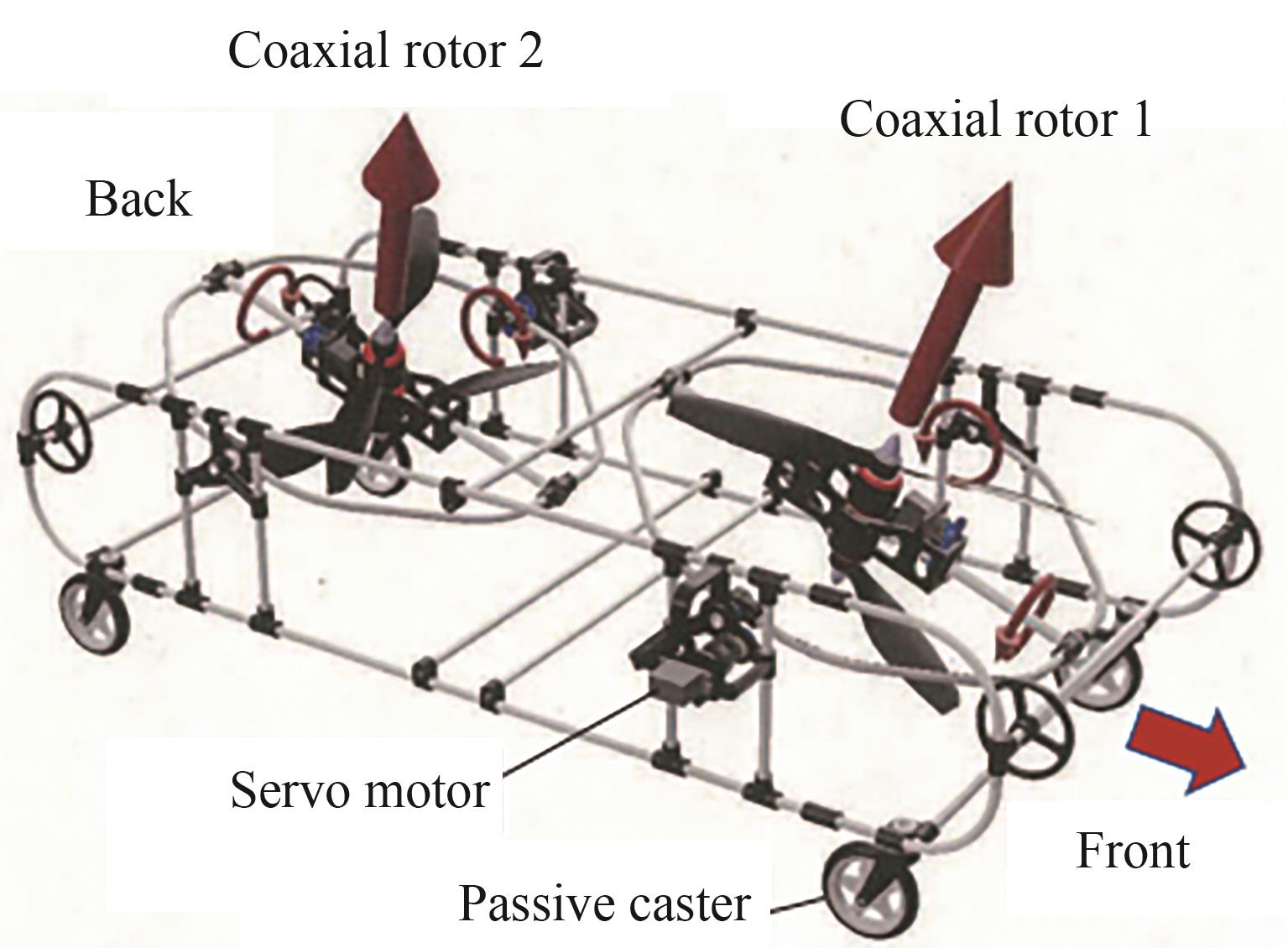

Fig.53
Wall-climbing robot of School of Electrical Engineering, KAIST[71-72]


Fig.54
Wall-climbing robot of Tandon School of Engineering,New York University[73]


Fig.55
Sticky-Pad plane of Deptment of Engineering Mechanics,United States Air Force Academy[74]

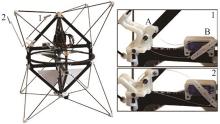
Fig.56
Sticky-pad plane of Laboratory of Intelligent Systems,Swiss Federal Polytechnic in Lausanne[75]
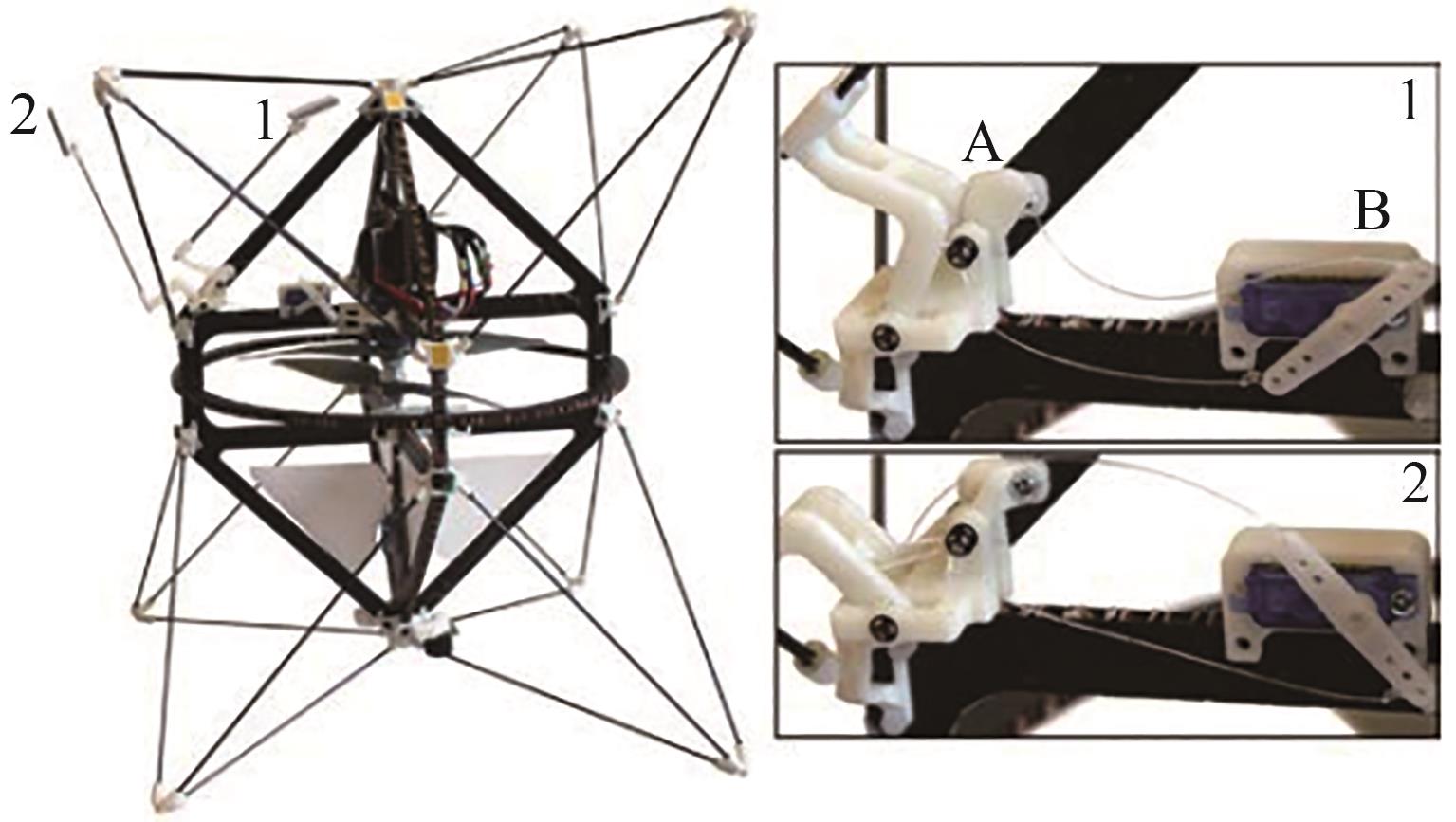
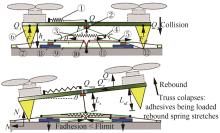
Fig.57
Sticky-pad plane of Mechanical Engineering School, Stanford University[76-77]
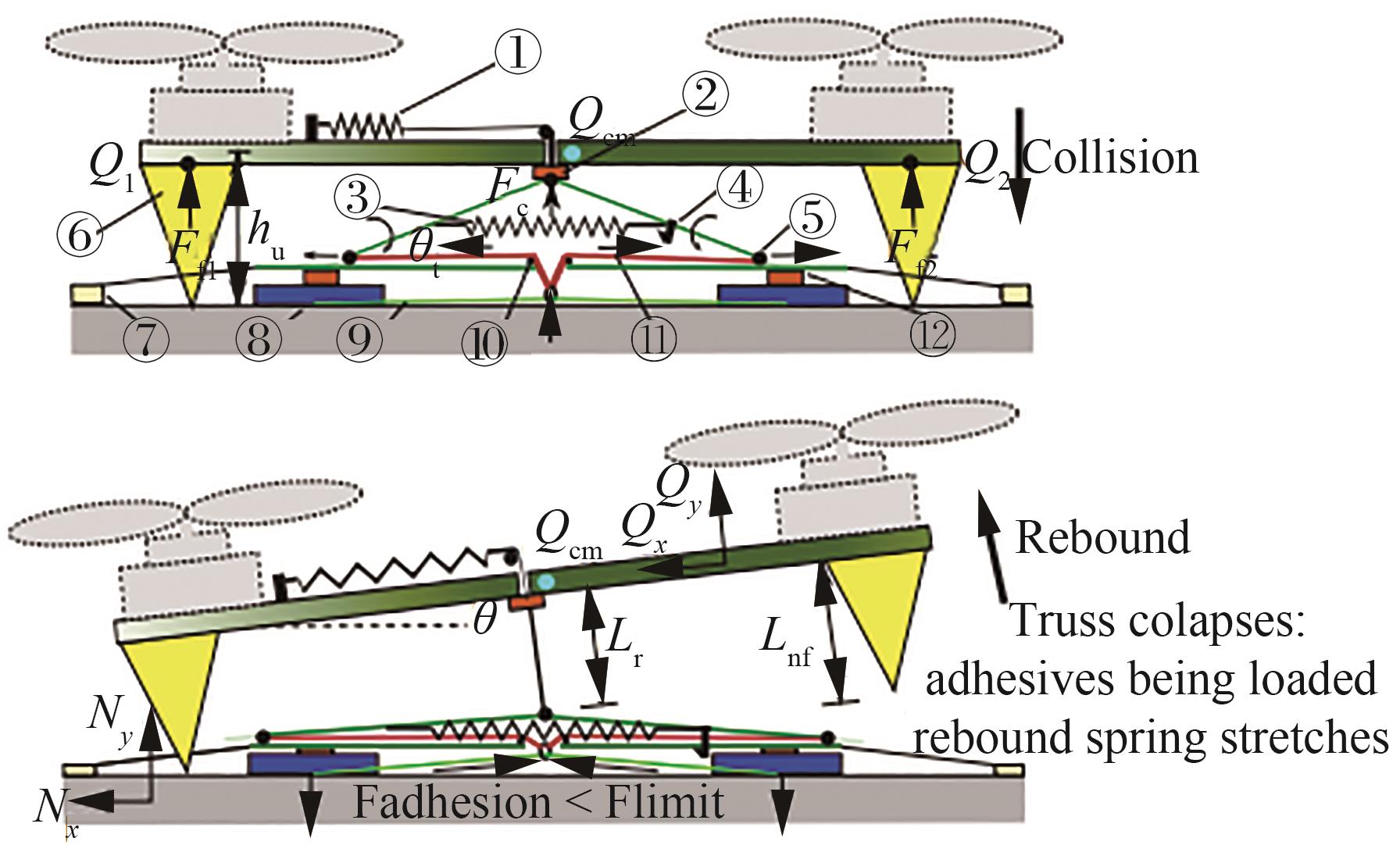
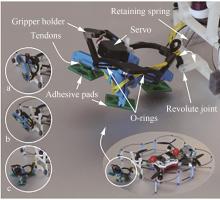
Fig.58
Sticky-pad plane of Mechanical,Materials,and Aerospace Engineering Department,Illinois Institute of Technology[78]

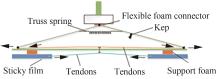
Fig.59
Sticky-pad plane of College of Electronic Communication and Physics,Shandong University of Science and Technology[79]

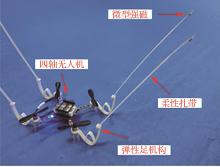
Fig.60
Magnetic MAV of Guangdong University of Technology[80]
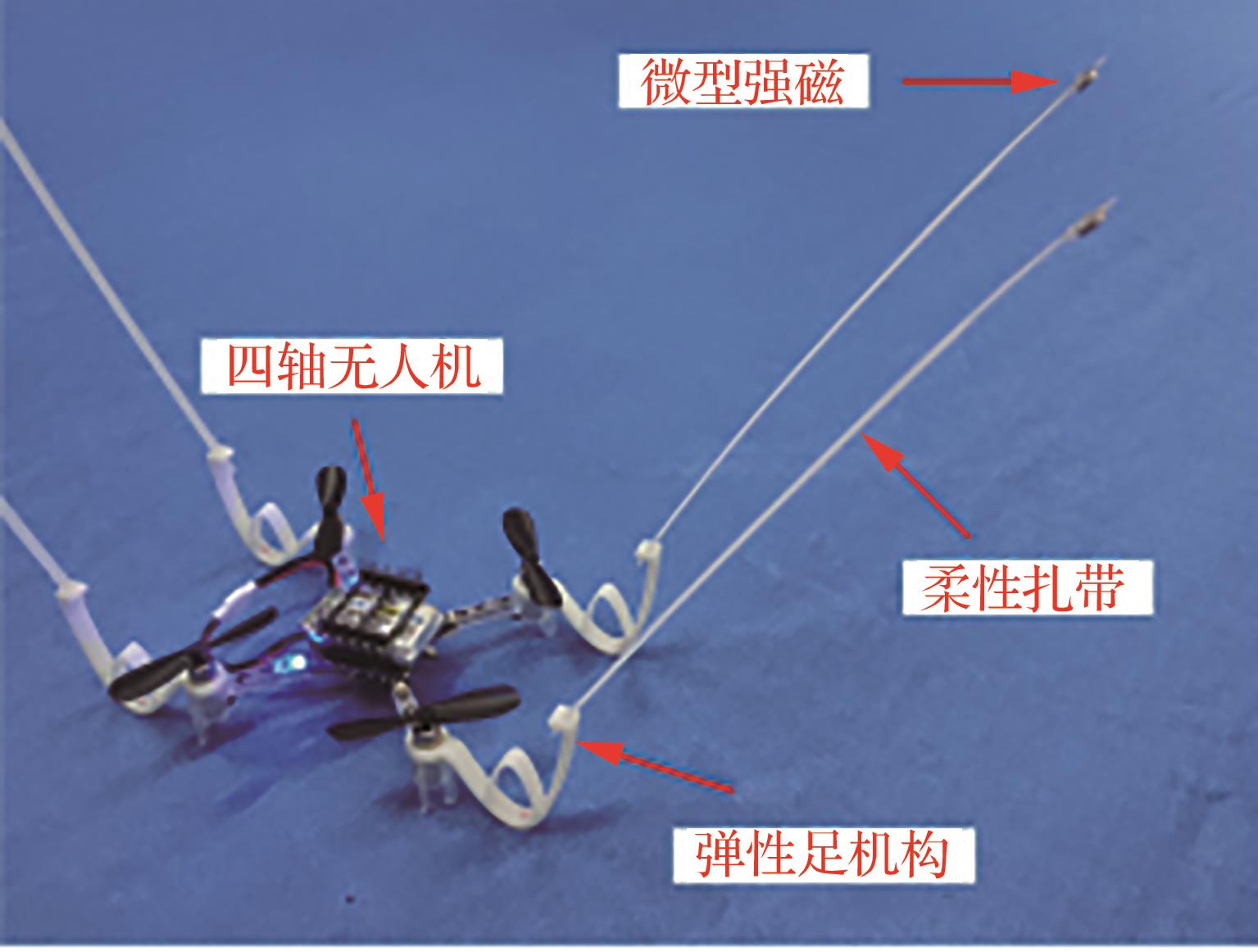

Fig.61
Electroadhesive perching MAV of Department of Electrical Engineering,Stanford University[81]

Fig.62
Bionic electrostatic adhesion MAV of Harvard University[82]
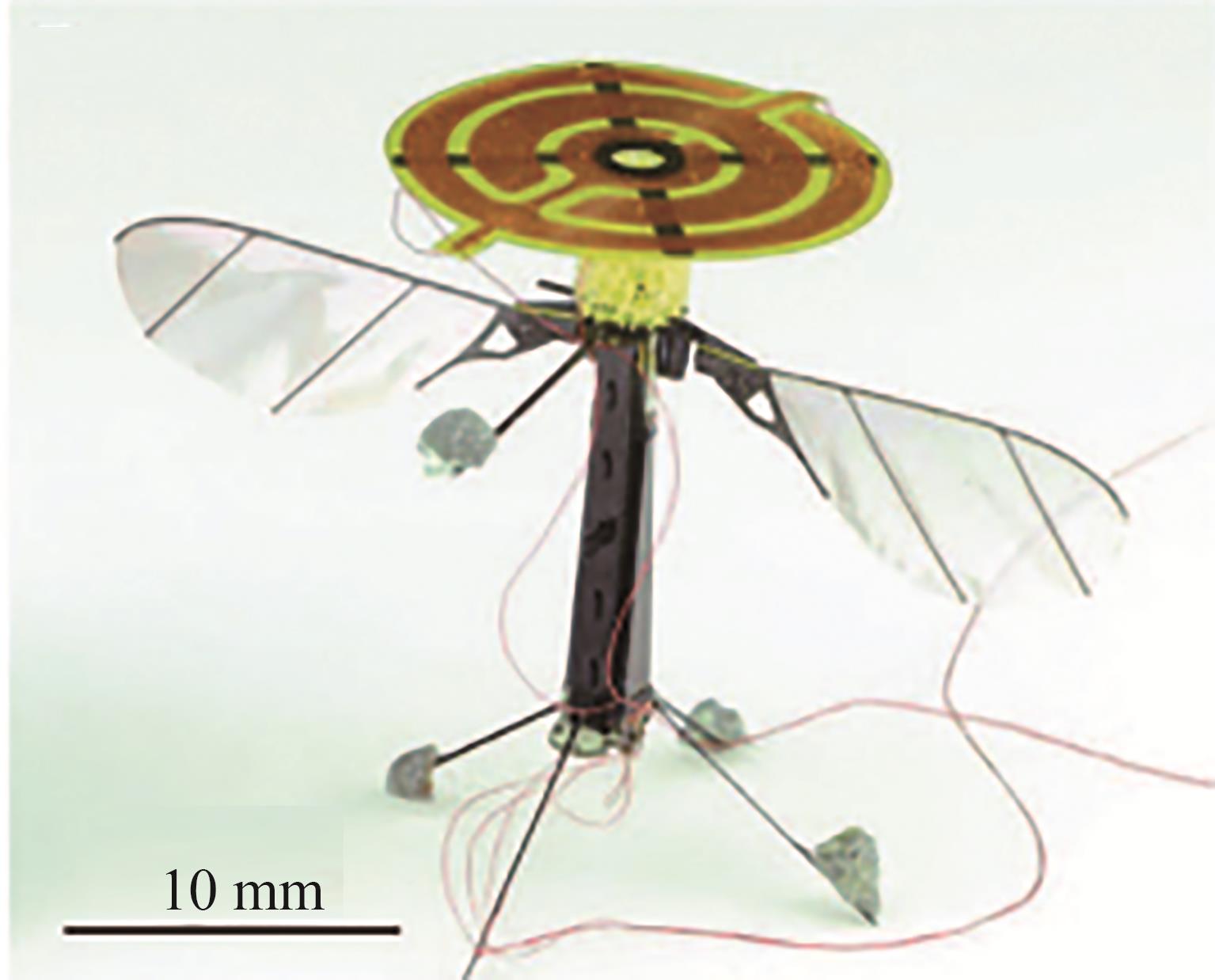
Fig.63
Variable wing of America Air Force Research Laboratory [83]

Fig.64
Variable mechanism of Harvard University[84]


Fig.65
Morphing UAV of Department of Aerospace Engineering,University of Bristol[85]


Fig.66
Morphing UAV of College of Automation Engineering,Nanjing University of Aeronautics & Astronautics[86]
| 1 | 闫超,涂良辉,王聿豪,等. 无人机在我国民用领域应用综述[J]. 飞行力学,2022,40(3):1-6,12. |
| YAN C, TU L H, WANG Y H,et al. Application of unmanned aerial vehicle in civil field in China[J]. Flight Dynamics,2022,40(3):1-6,12 (in Chinese). | |
| 2 | 崔敬魁. 面向电网巡线和森林火情监测的无人机路径规划算法研究[D]. 西安:西安理工大学,2017:1-4. |
| CUI J K. Research on UAV path planning algorithm for power line inspection and forest fire monitoring[D]. Xi’an:Xi’an University of Technology,2017:1-4 (in Chinese). | |
| 3 | 杨扬,王连发,张宇峰. 无人机桥梁检测技术进展与瓶颈问题分析[J]. 现代交通技术,2020,17(4):27-32. |
| YANG Y, WANG L F, ZHANG Y F. Development and challenging issues of bridge detection technology using unmanned aerial vehicles[J]. Modern Transportation Technology,2020,17(4):27-32 (in Chinese). | |
| 4 | 黄龙,张卫华,陈今茂,等. 爬壁机器人的研究现状与发展趋势[J]. 机械工程与技术,2021(3):345-363. |
| HUANG L, ZHANG W H, CHEN J M,et al. A review and trend of wall-climbing robots[J]. Mechanical Engineering and Technology,2021(3):345-363 (in Chinese). | |
| 5 | CULLER E, THOMAS G, LEE C. A perching landing gear for a quadcopter[C] ∥ 53rd AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics and Materials Conference. Reston:AIAA,2012. |
| 6 | ERBIL M A, PRIOR S D, KEANE A J. Design optimisation of a reconfigurable perching element for vertical take-off and landing unmanned aerial vehicles[J]. International Journal of Micro Air Vehicles,2013,5(3):207-228. |
| 7 | CHI W C, LOW K H, HOON K H,et al. Design of control strategy for autonomous perching with a quadrotor[J]. Applied Mechanics and Materials,2013,461:506-512. |
| 8 | CHI W C, LOW K H, HOON K H,et al. An optimized perching mechanism for autonomous perching with a quadrotor[C] ∥ 2014 IEEE International Conference on Robotics and Automation(ICRA). Piscataway:IEEE Press, 2014: 3109-3115. |
| 9 | LUO C, YU L J, REN P. A vision-aided approach to perching a bioinspired unmanned aerial vehicle[J]. IEEE Transactions on Industrial Electronics,2018,65(5):3976-3984. |
| 10 | PHANG S K, HAMID M R A, CHEN X D,et al. Autonomous ledge detection and landing with multi-rotor UAV[C] ∥ 2018 IEEE 14th International Conference on Control and Automation(ICCA). Piscataway:IEEE Press, 2018: 42-47. |
| 11 | LIN T J, LONG S Y, STOL K A. Automated perching of a multirotor UAV atop round timber posts[C] ∥ 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics(AIM). Piscataway:IEEE Press,2018: 486-491. |
| 12 | POPEK K M, JOHANNES M S, WOLFE K C,et al. Autonomous grasping robotic aerial system for perching(AGRASP)[C] ∥ 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Piscataway: IEEE Press,2018: 1-9. |
| 13 | HANG K Y, LYU X M, SONG H R,et al. Perching and resting-A paradigm for UAV maneuvering with modularized landing gears[J]. Science Robotics,2019,4(28):eaau6637. |
| 14 | ZHANG H J, SUN J F, ZHAO J G. Compliant bistable gripper for aerial perching and grasping[C] ∥ 2019 International Conference on Robotics and Automation(ICRA). Piscataway:IEEE Press,2019:1248-1253. |
| 15 | ZHANG H J, LERNER E, CHENG B,et al. Compliant bistable grippers enable passive perching for micro aerial vehicles[J]. IEEE/ASME Transactions on Mechatronics,2021,26(5):2316-2326. |
| 16 | YU P F, WANG Z H, WONG K C. Exploring aerial perching and grasping with dual symmetric manipulators and compliant end-effectors[J]. International Journal of Micro Air Vehicles,2019,11:175682931987741. |
| 17 | KITCHEN R, BIERWOLF N, HARBERTSON S,et al. Design and evaluation of a perching hexacopter drone for energy harvesting from power lines[C] ∥ 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Piscataway:IEEE Press,2020:1192-1198. |
| 18 | MAGESH M, JAWAHAR P K. Examination of shape memory polymer-auxetic landing gears on landing approach for quadcopter[J]. Materials Today:Proceedings,2021,47:471-479. |
| 19 | KOVAČ M, GERMANN J, HÜRZELER C,et al. A perching mechanism for micro aerial vehicles[J]. Journal of Micro-Nano Mechatronics,2009,5(3):77-91. |
| 20 | STEWART W, GUARINO L, PISKAREV Y,et al. Passive perching with energy storage for winged aerial robots[J]. Advanced Intelligent Systems,2021:2100150. |
| 21 | BACKUS S B, ODHNER L U, DOLLAR A M. Design of hands for aerial manipulation:Actuator number and routing for grasping and perching[C] ∥ 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press,2014: 34-40. |
| 22 | NAGENDRAN A, CROWTHER W, RICHARDSON R. Biologically inspired legs for UAV perched landing[J]. IEEE Aerospace and Electronic Systems Magazine,2012,27(2):4-13. |
| 23 | CHI W C, LOW K H, HOON K H,et al. A bio-inspired adaptive perching mechanism for unmanned aerial vehicles[J]. Journal of Robotics and Mechatronics,2012,24(4):642-648. |
| 24 | DOYLE C E, BIRD J J, ISOM T A,et al. An avian-inspired passive mechanism for quadrotor perching[J]. IEEE/ASME Transactions on Mechatronics,2013,18(2):506-517. |
| 25 | XIE P, MA O. Grasping analysis of a bio-inspired UAV/MAV perching mechanism[C] ∥ Proceedings of ASME 2013 International Mechanical Engineering Congress and Exposition. New York:ASME,2013. |
| 26 | NADAN P M, ANTHONY T M, MICHAEL D M,et al. A bird-inspired perching landing gear system[J]. Journal of Mechanisms and Robotics,2019,11(6):061002. |
| 27 | NADAN P M, LEE C L. Computational design of a bird-inspired perching landing gear mechanism[C] ∥ ASME International Mechanical Engineering Congress and Exposition. New York:ASME,2018. |
| 28 | MCLAREN A, FITZGERALD Z, GAO G,et al. A passive closing,tendon driven,adaptive robot hand for ultra-fast,aerial grasping and perching[C] ∥ 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Piscataway:IEEE Press,2019: 5602-5607. |
| 29 | BAI L, WANG H, CHEN X H,et al. Design and experiment of a deformable bird-inspired UAV perching mechanism[J]. Journal of Bionic Engineering,2021,18(6):1304-1316. |
| 30 | RODERICK W R T, CUTKOSKY M R, LENTINK D. Bird-inspired dynamic grasping and perching in arboreal environments[J]. Science Robotics,2021,6(61):eabj7562. |
| 31 | RODERICK W R T, CUTKOSKY M R, LENTINK D. Touchdown to take-off:At the interface of flight and surface locomotion[J]. Interface Focus,2017,7(1):20160094. |
| 32 | 昌敏,孙杨,白俊强. 垂面栖息微型无人机飞行原理与技术进展[J]. 无人系统技术,2019,2(2):22-31. |
| CHANG M, SUN Y, BAI J Q. Flight principles and research progress on vertical-perching micro aerial vehicle(MAV)[J]. Unmanned Systems Technology,2019,2(2):22-31 (in Chinese). | |
| 33 | 倪勇,吉爱红,肖天航,等. 兼具扑翼飞行与爬壁能力的仿生两栖机器人研究[J]. 机电一体化,2017,23(2):9-16,46. |
| NI Y, JI A H, XIAO T H,et al. Study of biomimetic amphibious robot for flapping and climbing[J]. Mechatronics,2017, 23(2):9-16, 46 (in Chinese). | |
| 34 | CUTKOWSKY M, DESBIENS A. Bio-inspired perching and crawling air vehicles[EB/OL]. (2008-10-2)[2022-6-4]. . |
| 35 | DESBIENS A L, ASBECK A T, CUTKOSKY M R. Scansorial landing and perching[M] ∥ Robotics research. Berlin,Heidelberg:Springer,2011: 169-184. |
| 36 | DESBIENS A L, ASBECK A T, CUTKOSKY M R. Landing,perching and taking off from vertical surfaces[J]. The International Journal of Robotics Research,2011,30(3):355-370. |
| 37 | LUSSIER D A. Landing and perching on vertical surfaces[D]. Stanford: Stanford University,2012. |
| 38 | DICKSON J D, CLARK J E. Design of a multimodal climbing and gliding robotic platform[J]. IEEE/ASME Transactions on Mechatronics,2012,18(2):494-505. |
| 39 | MEHANOVIC D, BASS J, COURTEAU T,et al. Autonomous thrust-assisted perching of a fixed-wing UAV on vertical surfaces[C] ∥ Conference on Biomimetic and Biohybrid Systems. Cham:Springer,2017: 302-314. |
| 40 | MEHANOVIC D, RANCOURT D, DESBIENS A L. Fast and efficient aerial climbing of vertical surfaces using fixed-wing UAVs[J]. IEEE Robotics and Automation Letters,2019,4(1):97-104. |
| 41 | POPE M T, KIMES C W, JIANG H,et al. A multimodal robot for perching and climbing on vertical outdoor surfaces[J]. IEEE Transactions on Robotics,2017,33(1):38-48. |
| 42 | POPE M T, CUTKOSKY M R. Thrust-assisted perching and climbing for a bioinspired UAV[C] ∥ Conference on Biomimetic and Biohybrid Systems. Cham:Springer,2016: 288-296. |
| 43 | ZHANG K, CHERMPRAYONG P, ALHINAI T M,et al. SpiderMAV:Perching and stabilizing micro aerial vehicles with bio-inspired tensile anchoring systems[C] ∥ 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Piscataway: IEEE Press,2017: 6849-6854. |
| 44 | NGUYEN H N, SIDDALL R, STEPHENS B,et al. A passively adaptive microspine grapple for robust,controllable perching[C] ∥ 2019 2nd IEEE International Conference on Soft Robotics(RoboSoft). Piscataway:IEEE,2019. |
| 45 | BACKUS S, IZRAELEVITZ J, QUAN J,et al. Design and testing of an ultra-light weight perching system for sloped or vertical rough surfaces on Mars[C] ∥ 2020 IEEE Aerospace Conference. Piscataway:IEEE Press,2020: 1-12. |
| 46 | LIU Y, SUN G X, CHEN H P. Impedance control of a bio-inspired flying and adhesion robot[C] ∥ 2014 IEEE International Conference on Robotics and Automation(ICRA). Piscataway:IEEE Press,2014:3564-3569. |
| 47 | WOPEREIS H W, VAN DER MOLEN T D, POST T H,et al. Mechanism for perching on smooth surfaces using aerial impacts[C]∥2016 IEEE International Symposium on Safety, Security,and Rescue robotics(SSRR). Piscataway:IEEE Press,2016:154-159. |
| 48 | HUANG T H, ELIBOLI A, CHONG N Y. A design for UAV irregular surface landing capability[C]∥ Proceedings of the 2020 17th International Conference on Ubiquitous Robots. 2020. |
| 49 | LIU S S, DONG W, MA Z,et al. Adaptive aerial grasping and perching with dual elasticity combined suction cup[J]. IEEE Robotics and Automation Letters,2020,5(3):4766-4773. |
| 50 | LIU S S, DONG W, MA Z,et al. Dual-durometer combination of vacuum cup for aerial grasping[C] ∥ 2020 IEEE International Conference on Real-time Computing and Robotics(RCAR). Piscataway:IEEE Press,2020:8-13. |
| 51 | TSUKAGOSHI H, OSADA Y. Soft hybrid suction cup capable of sticking to various objects and environments[J]. Actuators,2021,10(3):50. |
| 52 | MAHMOOD S K, BAKHY S H, TAWFIK M A. Propeller-type wall-climbing robots:A review[C] ∥ IOP Conference Series:Materials Science and Engineering. 2021, 1094(1): 012106. |
| 53 | DING X, YU Y, ZHU J J. Trajectory linearization tracking control for dynamics of a multi-propeller and multifunction aerial robot-MMAR[C] ∥ 2011 IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press,2011:757-762. |
| 54 | DING X L, YU Y S. Motion planning and stabilization control of a multipropeller multifunction aerial robot[J]. IEEE/ASME Transactions on Mechatronics,2013,18(2):645-656. |
| 55 | SHIN J U, KIM D, KIM J H,et al. Micro aerial vehicle type wall-climbing robot mechanism[C] ∥ 2013 IEEE RO-MAN. Piscataway:IEEE Press,2013: 722-725. |
| 56 | MYEONG W C, JUNG K Y, JUNG S W,et al. Drone-type wall-climbing robot platform for structural health monitoring[C] ∥ 6th AESE/11th ANCRiSST Joint Conference. 2015. |
| 57 | MYEONG W C, JUNG K Y, JUNG S W,et al. Development of a drone-type wall-sticking and climbing robot[C] ∥ 2015 12th International Conference on Ubiquitous Robots and Ambient Intelligence(URAI). Piscataway:IEEE Press,2015: 386-389. |
| 58 | YAMADA M, NAKAO M, HADA Y,et al. Development and field test of novel two-wheeled UAV for bridge inspections[C] ∥ 2017 International Conference on Unmanned Aircraft Systems(ICUAS). Piscataway:IEEE Press, 2017: 1014-1021. |
| 59 | IWAMOTO T, ENAKA T, TADA K. Development of testing machine for tunnel inspection using multi-rotor UAV[J]. Journal of Physics:Conference Series,2017,842:012068. |
| 60 | JUNG S, SHIN J U, MYEONG W,et al. Mechanism and system design of MAV(Micro Aerial Vehicle)-type wall-climbing robot for inspection of wind blades and non-flat surfaces[C] ∥ 2015 15th International Conference on Control,Automation and Systems(ICCAS). Piscataway:IEEE Press,2015:1757-1761. |
| 61 | TANAKA K, ZHANG D, INOUE S,et al. A design of a small mobile robot with a hybrid locomotion mechanism of wheels and multi-rotors[C] ∥ 2017 IEEE International Conference on Mechatronics and Automation(ICMA). Piscataway:IEEE,2017. |
| 62 | MYEONG W, SONG S, MYUNG H. Development of a wall-climbing drone with a rotary arm for climbing various-shaped surfaces[C] ∥ 2018 15th International Conference on Ubiquitous Robots(UR). Piscataway:IEEE Press,2018:687-692. |
| 63 | WATANABE K, NAKATSUKA T, NAGAI I. Production of a wall-climbing-type quadrotor and its experiment for verifying basic operations[C] ∥ 2018 IEEE International Conference on Mechatronics and Automation(ICMA). Piscataway:IEEE Press,2018:1850-1855. |
| 64 | ANDRIKOPOULOS G, NIKOLAKOPOULOS G. Vortex actuation via electric ducted fans:An experimental study[J]. Journal of Intelligent & Robotic Systems,2019,95(3):955-973. |
| 65 | YASUNAGA M, LEE J H, OKAMOTO S. Prototype design and experimental test of a rotorcraft capable of adhering to and moving on the ceiling[C] ∥ MATEC Web of Conferences. Paris:EDP Sciences,2016. |
| 66 | MYEONG W, MYUNG H. Development of a wall-climbing drone capable of vertical soft landing using a tilt-rotor mechanism[J]. IEEE Access,2018,7:4868-4879. |
| 67 | JIANG S, ZHANG J. Real-time crack assessment using deep neural networks with wal-climbing unmanned aerial system[J]. Computer-Aided Civil and Infrastructure Engineering,2020,35(6):549-564. |
| 68 | MAHMOOD S K, BAKHY S H, TAWFIK M A. Novel wall-climbing robot capable of transitioning and perching[C] ∥ IOP Conference Series:Materials Science and Engineering. 2020. |
| 69 | DAVID N B, ZARROUK D. Design and analysis of FCSTAR, a hybrid flying and climbing sprawl tuned robot[J]. IEEE Robotics and Automation Letters,2021,6(4):6188-6195. |
| 70 | KOMURA H, WATANABE K, NAGAI I. Production of a small-sized tandem rotor aircraft with two tiltable coaxial rotors and its experiments[C] ∥ 2021 IEEE International Conference on Mechatronics and Automation(ICMA). Piscataway:IEEE Press,2021: 687-691. |
| 71 | LEE H, YU B, TIRTAWARDHANA C,et al. CAROS-Q:Climbing aerial robot system adopting rotor offset with a quasi-decoupling controller[J]. IEEE Robotics and Automation Letters,2021,6(4):8490-8497. |
| 72 | LEE H, JEONG M, KIM C,et al. Low-level pose control of tilting multirotor for wall perching tasks using reinforcement learning[C] ∥ 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Piscataway:IEEE Press,2021. |
| 73 | MAO J, LI G, NOGAR S,et al. Aggressive visual perching with quadrotors on inclined surfaces[C] ∥ 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Piscataway:IEEE Press,2021:5242-5248. |
| 74 | ANDERSON M. The sticky-pad plane and other innovative concepts for perching UAVS[C] ∥ 47th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition. Reston:AIAA,2009. |
| 75 | DALER L, KLAPTOCZ A, BRIOD A,et al. A perching mechanism for flying robots using a fibre-based adhesive[C] ∥ 2013 IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press,2013:4433-4438. |
| 76 | JIANG H, POPE M T, HAWKES E W,et al. Modeling the dynamics of perching with opposed-grip mechanisms[C] ∥ 2014 IEEE International Conference on Robotics and Automation(ICRA). Piscataway:IEEE Press,2014:3102-3108. |
| 77 | THOMAS J, POPE M, LOIANNO G,et al. Aggressive flight with quadrotors for perching on inclined surfaces[J]. Journal of Mechanisms and Robotics,2016,8(5):051007. |
| 78 | KALANTARI A, MAHAJAN K, RUFFATTO D,et al. Autonomous perching and take-off on vertical walls for a quadrotor micro air vehicle[C] ∥ 2015 IEEE International Conference on Robotics and Automation(ICRA). Piscataway:IEEE Press,2015:4669-4674. |
| 79 | GUO Y, ZHANG J, JU Y,et al. Climbing reconnaissance drone design[C] ∥ IOP Conference Series:Materials Science and Engineering. 2018, 452: 042060. |
| 80 | 蒋俊高. 面向无人机的仿生壁面自动起降系统的设计[D]. 广州:广东工业大学,2020: 13-40. |
| JIANG J G. Design of bioic wall surface automatic takeoff and landing system for UAV[D]. Guangzhou:Guangdong University of Technology,2020: 13-40 (in Chinese). | |
| 81 | PARK S, DREW D S, FOLLMER S,et al. Lightweight high voltage generator for untethered electroadhesive perching of micro air vehicles[J]. IEEE Robotics and Automation Letters,2020,5(3):4485-4492. |
| 82 | GRAULE M A, CHIRARATTANANON P, FULLER S B,et al. Perching and takeoff of a robotic insect on overhangs using switchable electrostatic adhesion[J]. Science,2016,352(6288):978-982. |
| 83 | REICH G, WOJNAR O, ALBERTANI R. Aerodynamic performance of a notional perching MAV design[C] ∥ 47th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition. Reston:AIAA,2009:63. |
| 84 | MANCHESTER Z R, LIPTON J I, WOOD R J,et al. A variable forward-sweep wing design for enhanced perching in micro aerial vehicles[C] ∥ 55th AIAA Aerospace Sciences Meeting. Reston:AIAA,2017:0011. |
| 85 | GREATWOOD C, WALDOCK A, RICHARDSON T. Perched landing manoeuvres with a variable sweep wing UAV[J]. Aerospace Science and Technology,2017,71:510-520. |
| 86 | 袁亮,何真,王月. 变体无人机栖落机动建模与轨迹优化[J]. 南京航空航天大学学报,2018,50(2):266-275. |
| YUAN L, HE Z, WANG Y. Modeling and trajectory optimization of perching maneuvers for morphing UAV[J]. Journal of Nanjing University of Aeronautics & Astronautics,2018,50(2):266-275 (in Chinese). | |
| 87 | HURST A, WICKENHEISER A, GARCIA E. Localization and perching maneuver tracking for a morphing UAV[C] ∥ Proceedings of IEEE/ION PLANS 2008. Piscataway:IEEE Press,2008. |
| 88 | WICKENHEISER A, GARCIA E. Perching aerodynamics and trajectory optimization[C] ∥ Active and Passive Smart Structures and Integrated Systems 2007. San Diego:International Society for Optics and Photonics,2007,6525:191-199. |
| 89 | 何真,陆宇平,郑曼曼. 变体无人机栖息机动的仿真与分析[C] ∥ 第三十三届中国控制会议论文集(E卷). 上海:上海系统科学出版社,2014: 109-114. |
| HE Z, LU Y P, ZHENG M M. Simulation and analysis of perching maneuvers for morphing UAVS[C] ∥ Proceedings of the 33rd China Control Conference(Volume E). Shanghai:Shanghai Systems Science Press,2014: 109-114. | |
| 90 | 岳珵,何真,王无天. 变体辅助的无人机栖落机动模糊控制设计[J]. 南京航空航天大学学报,2020,52(6):871-880. |
| YUE C, HE Z, WANG W T. Fuzzy control design for perching maneuvers of morphing UAVs[J]. Journal of Nanjing University of Aeronautics & Astronautics,2020,52(6):871-880 (in Chinese). | |
| 91 | WANG P F, ZHANG Y F, QIN H L,et al. Offline perching location selection for quadrotor UAV in urban environment[C] ∥ 2016 12th IEEE International Conference on Control and Automation(ICCA). Piscataway:IEEE Press,2016. |
| 92 | ZHANG Z, XIE P, MA O. Bio-inspired trajectory generation for UAV perching movement based on tau theory[J]. International Journal of Advanced Robotic Systems,2014,11(9):141. |
| 93 | ZHANG Z, XIE P, MA O. Bio-inspired trajectory generation for UAV perching[C] ∥ 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Piscataway:IEEE Press,2013:997-1002. |
| 94 | CHI W. A bio-inspired methodology of automatic perching for unmanned aerial vehicles[D]. Singapore:Nanyang Technological University,2016: 23-41. |
| 95 | MAITRA A, PRASATH S R, PADHI R. A brief survey on bio-inspired algorithms for autonomous landing[J]. IFAC-Papers Online,2016,49(1):407-412. |
| 96 | TOMIĆ T, MAIER M, HADDADIN S. Learning quadrotor maneuvers from optimal control and generalizing in real-time[C] ∥ 2014 IEEE International Conference on Robotics and Automation(ICRA). Piscataway:IEEE Press,2014:1747-1754. |
| 97 | GHADIOK V, GOLDIN J, REN W. On the design and development of attitude stabilization,vision-based navigation,and aerial gripping for a low-cost quadrotor[J]. Autonomous Robots,2012,33(1):41-68. |
| 98 | ZHANG H, ZHAO J. Vision based surface slope estimation for unmanned aerial vehicle perching[C] ∥ Dynamic Systems and Control Conference in 2018. New York:ASME,2018. |
| 99 | 叶希. 近面环境下四旋翼无人机的控制技术研究[D]. 南京:南京理工大学,2019: 29-37. |
| YE X. Research on control technology of quadrotor UAV in near-surface environment[D]. Nanjing:Nanjing University of Science & Technology,2019: 29-37 (in Chinese). | |
| 100 | 孙杨,昌敏,白俊强. 微小型四旋翼无人机垂面栖停轨迹规划与控制[J]. 航空学报,2022,43(9):325756. |
| SUN Y, CHANG M, BAI J Q. Trajectory planning and control for micro-quadrotor perching on vertical surface[J]. Acta Aeronautica et Astronautica Sinica,2022,43(9):325756 (in Chinese). | |
| 101 | TAHK M J, HAN S, LEE B Y,et al. Perch landing assisted by thruster(PLAT):Concept and trajectory optimization[J]. International Journal of Aeronautical and Space Sciences,2016,17(3):378-390. |
| 102 | TAHK M J, HAN S, LEE B Y,et al. Trajectory optimization and control algorithm of longitudinal perch landing assisted by thruster[C] ∥ 2016 European Control Conference(ECC). Piscataway:IEEE Press,2016. |
| 103 | WALDOCK A, GREATWOOD C, SALAMA F,et al. Learning to perform a perched landing on the ground using deep reinforcement learning[J]. Journal of Intelligent and Robotic Systems,2018,92(3-4):685-704. |
| 104 | ALIKHAN M, PEYADA N K, GO T H. Flight dynamics and optimization of three-dimensional perching maneuver[J]. Journal of Guidance,Control,and Dynamics,2013,36(6):1791-1797. |
| 105 | 李达,何真,阚莹莹. 无人机栖落机动建模与轨迹优化[J]. 飞行力学,2017,35(4):47-51. |
| LI D, HE Z, KAN Y Y. Modeling and trajectory optimization of perching maneuvers for UAV[J]. Flight Dynamics,2017,35(4):47-51 (in Chinese). | |
| 106 | 邹文露. 无人机栖息动态特性分析与同步控制[D]. 成都:电子科技大学,2018:36-49. |
| ZOU W L. Dynamic characteristics analysis and synchronous control of unmanned aerial vehicle[D]. Chengdu:University of Electronic Science and Technology of China,2018:36-49 (in Chinese). | |
| 107 | FEROSKHAN M, GO T H. Control strategy of sideslip perching maneuver under dynamic stall influence[J]. Aerospace Science and Technology,2018,72:150-163. |
| 108 | MOORE J, CORY R, TEDRAKE R. Robust post-stall perching with a simple fixed-wing glider using LQR-Trees[J]. Bioinspiration & Biomimetics,2014,9(2):025013. |
| 109 | CRANDALL K L, MINOR M A. UAV fall detection from a dynamic perch using Instantaneous Centers of Rotation and inertial sensing[C] ∥ 2015 IEEE International Conference on Robotics and Automation(ICRA). Piscataway:IEEE Press,2015: 4675-4679. |
| 110 | 王无天,何真,岳珵. 飞行器栖落机动的轨迹跟踪控制及吸引域优化计算[J]. 北京航空航天大学学报,2021,47(2):414-423. |
| WANG W T,HEN Z, YUE C. Trajectory tracking control and optimal computation of attraction domain for aircraft in perching maneuvers[J]. Journal of Beijing University of Aeronautics and Astronautics,2018,40(11):414-423 (in Chinese). | |
| 111 | 万慧雯,何真,曹瑞,等. 无人机栖落机动的一种离线鲁棒预测控制算法[J]. 南京航空航天大学学报,2019,51(6):785-794. |
| WAN H W, HE Z, CAO R. An off-line robust predictive control algorithm for UAV in perching maneuver[J]. Journal of Nanjing University of Aeronautics & Aeronautics,2019,51(6):785-794 (in Chinese). |
| [1] | SUN Chong, YUAN Jianping, WAN Wenya, CUI Yao. Outside envelop grasping method and approaching trajectory optimization for tumbling malfunctional satellite capture [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2018, 39(11): 322192-322203. |
| [2] | Wei Cheng;Zhao Yang;Tian Hao. Grasping Control of Space Robot for Capturing Floating Target [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2010, 31(3): 632-637. |
| [3] | Wang Guoqing;Zhang Qixian;Li Dazhai;He Yongqiang. GRASPING CONTROL OF THE DEXTEROUS HAND BASED ON THE DEGREE OF STABILITY OF GRASPING [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 1997, 18(3): 294-298. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 518
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341