| [1] |
王平, 于晓强, 郭继峰. 月球大范围探测巡视器及GNC技术发展综述[J]. 宇航学报, 2022, 43(5): 548-562.
|
|
WANG P, YU X Q, GUO J F. A survey of lunar wide-range exploration rover and GNC technology[J]. Journal of Astronautics, 2022, 43(5): 548-562 (in Chinese).
|
| [2] |
解杨敏, 季力, 魏祥泉, 等. 国内外行星表面巡视器自主导航技术研究[J]. 上海航天(中英文), 2021, 38(1): 61-71.
|
|
XIE Y M, JI L, WEI X Q, et al. Domestic and overseas research status on autonomous navigation technology of planetary rovers[J]. Aerospace Shanghai, 2021, 38(1): 61-71 (in Chinese).
|
| [3] |
JIA Y T, ZHANG S N, LIU B, et al. A robust method for large-scale route optimization on lunar surface utilizing a multi-level map model[J]. Chinese Journal of Aeronautics, 2025, 38(3): 103388.
|
| [4] |
LI J B, CHEN K Y, TIAN G J, et al. MarsSeg: Mars surface semantic segmentation with multilevel extractor and connector[J]. IEEE Transactions on Geoscience and Remote Sensing, 2025, 63: 4501012.
|
| [5] |
于晓强, 郭继峰, 赵毓, 等. 月面巡视机器人快速安全路径规划[J]. 航空学报, 2021, 42(1): 524153.
|
|
YU X Q, GUO J F, ZHAO Y, et al. Fast and safe path planning for lunar rovers[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 524153 (in Chinese).
|
| [6] |
JAHANSHAHI H, ZHU Z H. A comprehensive review of tactile sensing technologies in space robotics[J]. Chinese Journal of Aeronautics, 2025, 38(7): 103423.
|
| [7] |
陈卓宇, 安丰伟. 面向机器人导航的双目立体视觉处理器综述[J]. 集成电路与嵌入式系统, 2024, 24(11): 15-28.
|
|
CHEN Z Y, AN F W. Overview of binocular stereo vision processor for robot navigation[J]. Integrated Circuits and Embedded Systems, 2024, 24(11): 15-28 (in Chinese).
|
| [8] |
杨晓立, 徐玉华, 叶乐佳, 等. 双目立体视觉研究进展与应用[J]. 激光与光电子学进展, 2023, 60(8): 0811010.
|
|
YANG X L, XU Y H, YE L J, et al. Research progress on binocular stereo vision applications[J]. Laser & Optoelectronics Progress, 2023, 60(8): 0811010 (in Chinese).
|
| [9] |
王勇. 基于月面立体导航影像的三维地形重建[D]. 阜新: 辽宁工程技术大学, 2023: 59-61.
|
|
WANG Y. 3D terrain reconstruction based on lunar stereo navigation images[D]. Fuxin: Liaoning Technical University, 2023: 59-61 (in Chinese).
|
| [10] |
ZHANG F H, QI X J, YANG R G, et al. Domain-invariant stereo matching networks[C]∥Computer Vision-ECCV 2020. Cham: Springer, 2020: 420-439.
|
| [11] |
CAI C J, POGGI M, MATTOCCIA S, et al. Matching-space stereo networks for cross-domain generalization[C]∥2020 International Conference on 3D Vision (3DV). Piscataway: IEEE Press, 2021: 364-373.
|
| [12] |
ZHANG J W, WANG X, BAI X, et al. Revisiting domain generalized stereo matching networks from a Feature Consistency Perspective[C]∥2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2022: 12991-13001.
|
| [13] |
MAYER N, ILG E, HÄUSSER P, et al. A large dataset to train convolutional networks for disparity, optical flow, and scene flow estimation[C]∥2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2016: 4040-4048.
|
| [14] |
GEIGER A, LENZ P, STILLER C, et al. Vision meets robotics: The KITTI dataset[J]. The International Journal of Robotics Research, 2013, 32(11): 1231-1237.
|
| [15] |
刘传凯, 王沼翔, 雷俊雄, 等. 基于松弛极线约束的月面复杂仿射变换图像匹配方法[J]. 航空学报, 2024, 45(2): 328659.
|
|
LIU C K, WANG Z X, LEI J X, et al. An epipolar relaxation constrained matching algorithm of large-affined images for lunar rover with large span distance in a single movement[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(2): 328659 (in Chinese).
|
| [16] |
GARG R, VIJAY KUMAR B G, CARNEIRO G, et al. Unsupervised CNN for single view depth estimation: geometry to the rescue[M]∥Computer Vision-ECCV 2016. Cham: Springer, 2016: 740-756.
|
| [17] |
REN Z, YAN J C, NI B B, et al. Unsupervised deep learning for optical flow estimation[C]∥Proceedings of the AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2017, 1495-1501.
|
| [18] |
GODARD C, AODHA O MAC, BROSTOW G J. Unsupervised monocular depth estimation with left-right consistency[C]∥2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2017: 6602-6611.
|
| [19] |
ZHANG Y M, CHEN Y M, BAI X, et al. Adaptive unimodal cost volume filtering for deep stereo matching[C]∥Proceedings of the AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2020, 34(7): 12926-12934.
|
| [20] |
POGGI M, TONIONI A, TOSI F, et al. Continual adaptation for deep stereo[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(9): 4713-4729.
|
| [21] |
TONIONI A, POGGI M, MATTOCCIA S, et al. Unsupervised adaptation for deep stereo[C]∥2017 IEEE International Conference on Computer Vision (ICCV). Piscataway: IEEE Press, 2017: 1614-1622.
|
| [22] |
TONIONI A, POGGI M, MATTOCCIA S, et al. Unsupervised domain adaptation for depth prediction from images[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020, 42(10): 2396-2409.
|
| [23] |
WATSON J, AODHA O MAC, TURMUKHAMBETOV D, et al. Learning stereo from single images[C]∥Computer Vision-ECCV 2020. Cham: Springer, 2020: 722-740.
|
| [24] |
ALEOTTI F, TOSI F, ZHANG L, et al. Reversing the cycle: self-supervised deep stereo through enhanced monocular distillation[C]∥Computer Vision-ECCV 2020. Cham: Springer, 2020: 614-632.
|
| [25] |
TOSI F, TONIONI A, DE GREGORIO D, et al. NeRF-supervised deep stereo[C]∥2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2023: 855-866.
|
| [26] |
MARTIN-BRUALLA R, RADWAN N, SAJJADI M S M, et al. NeRF in the wild: Neural radiance fields for unconstrained photo collections[C]∥2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2021: 7206-7215.
|
| [27] |
HUANG L T, BAI J Y, GUO J, et al. On the error analysis of 3D Gaussian splatting and an optimal projection strategy[C]∥Computer Vision-ECCV 2024. Cham: Springer, 2024: 247-263.
|
| [28] |
MILDENHALL B, SRINIVASAN P P, TANCIK M, et al. NeRF: Representing scenes as neural radiance fields for view synthesis[J]. 2021, 65(1): 99-106.
|
| [29] |
HUANG B B, YU Z H, CHEN A P, et al. 2D Gaussian splatting for geometrically accurate radiance fields[C]∥ACM SIGGRAPH 2024 Conference Papers. New York: ACM, 2024: 1-11.
|
| [30] |
KENDALL A, MARTIROSYAN H, DASGUPTA S, et al. End-to-end learning of geometry and context for deep stereo regression[C]∥2017 IEEE International Conference on Computer Vision (ICCV). Piscataway: IEEE Press, 2017: 66-75.
|
| [31] |
CHANG J R, CHEN Y S. Pyramid stereo matching network[C]∥2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 5410-5418.
|
| [32] |
ZHANG F H, PRISACARIU V, YANG R G, et al. GA-net: guided aggregation net for end-to-end stereo matching[C]∥2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2020: 185-194.
|
| [33] |
GUO X Y, YANG K, YANG W K, et al. Group-wise correlation stereo network[C]∥2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2020: 3268-3277.
|
| [34] |
SHEN Z L, DAI Y C, RAO Z B. CFNet: cascade and fused cost volume for robust stereo matching[C]∥2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2021: 13901-13910.
|
| [35] |
GU X D, FAN Z W, DAI Z Z, et al. Cascade cost volume for high-resolution multi-view stereo and Stereo Matching[C]∥2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2020: 2495-2504.
|
| [36] |
LI Z, LIU X, DRENKOW N, et al. Revisiting stereo depth estimation from a sequence-to-sequence perspective with transformers[C]∥2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE Press, 2021: 6197-6206.
|
| [37] |
XU G, CHENG J, GUO P, et al. Attention concatenation volume for accurate and efficient stereo matchin g[C]∥2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2022: 12981-12990.
|
| [38] |
孔令寅, 朱江平, 应三丛. 基于引导图像和自适应支持域的立体匹配[J]. 光学学报, 2020, 40(9): 0915001.
|
|
KONG L Y, ZHU J P, YING S C. Stereo matching based on guidance image and adaptive support region[J]. Acta Optica Sinica, 2020, 40(9): 0915001 (in Chinese).
|
| [39] |
LIPSON L, TEED Z, DENG J. RAFT-stereo: multilevel recurrent field transforms for stereo matching[C]∥2021 International Conference on 3D Vision (3DV). Piscataway: IEEE Press, 2022: 218-227.
|
| [40] |
XU G W, WANG X Q, DING X H, et al. Iterative geometry encoding volume for stereo matching[C]∥2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2023: 21919-21928.
|
| [41] |
XU G W, WANG X Q, ZHANG Z X, et al. IGEV++: Iterative multi-range geometry encoding volumes for stereo matching[EB/OL]. (2025-05-11) [2025-10-01]: .
|
| [42] |
SCHÖNBERGER J L, FRAHM J M. Structure-from-motion revisited[C]∥2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2016: 4104-4113.
|
| [43] |
SHAH S, DEY D, LOVETT C, et al. AirSim: High-fidelity visual and physical simulation for autonomous vehicles[C]∥Field and Service Robotics. Cham: Springer, 2018: 621-635.
|
| [44] |
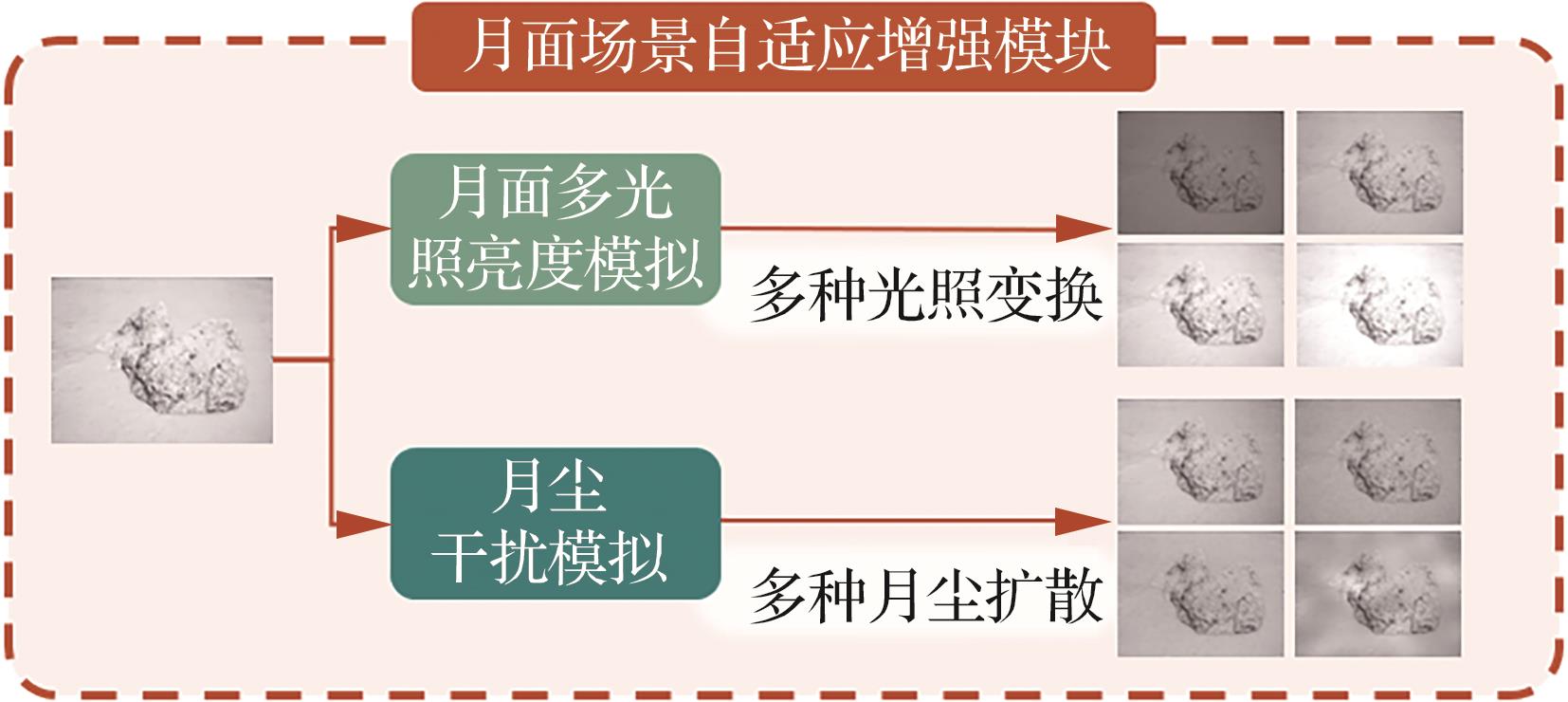
ROMÁN R, GONZÁLEZ R, TOLEDANO C, et al. Correction of a lunar-irradiance model for aerosol optical depth retrieval and comparison with a star photometer[J]. Atmospheric Measurement Techniques, 2020, 13(11): 6293-6310.
|
| [45] |
STUBBS T J, VONDRAK R R, FARRELL W M. A dynamic fountain model for lunar dust[J]. Advances in Space Research, 2006, 37(1): 59-66.
|
| [46] |
HOLLINGSWORTH D K, WITTE L C, HINKE J, et al. Reduction in emittance of thermal radiator coatings caused by the accumulation of a Martian dust simulant[J]. Applied Thermal Engineering, 2006, 26(17-18): 2383-2392.
|
| [47] |
LIU J Y, ZHANG Q Y, WAN X, et al. LuSNAR: A lunar segmentation, navigation and reconstruction dataset based on Muti-sensor for autonomous exploration[EB/OL]. (2024-09-26)[2025-10-01]: .
|
| [48] |
HIRSCHMULLER H. Stereo processing by semiglobal matching and mutual information[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2008, 30(2): 328-341.
|
| [49] |
MARTULL S, PERIS M, FUKUI K. Realistic CG stereo image dataset with ground truth disparity maps: IEICE PRMU-430[R]. Tokyo: IEICE, 2012.
|
| [50] |
MEI X, SUN X, ZHOU M C, et al. On building an accurate stereo matching system on graphics hardware[C]∥2011 IEEE International Conference on Computer Vision Workshops (ICCV Workshops). Piscataway: IEEE Press, 2012: 467-474.
|
| [51] |
SCHÖPS T, SCHÖNBERGER J L, GALLIANI S, et al. A multi-view stereo benchmark with high-resolution images and multi-camera videos[C]∥2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2017: 2538-2547.
|
 ), 李依真1, 李俊博1, 梅既澜1, 白相志1,2, 马江4
), 李依真1, 李俊博1, 梅既澜1, 白相志1,2, 马江4