
1 共轴高速直升机飞/发综合建模
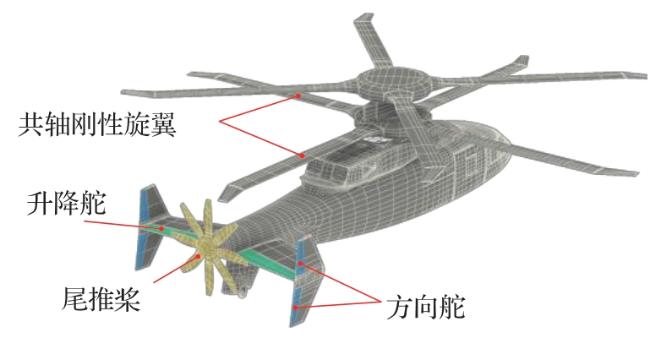
1.1 共轴高速直升机模型
| 参数 | 数值 |
|---|---|
| 全机质量/kg | 5 500 |
| 旋翼半径/m | 5.49 |
| 旋翼桨叶片数 | 3×2 |
| 旋翼旋转速度/(r·min-1) | 274.1~360.0 |
| 下旋翼位置/m | (0, 0, -0.89) |
| 上下旋翼间隙/m | 0.77 |
| 尾推桨半径/m | 1.3 |
| 尾推桨桨叶片数 | 6 |
| 尾推桨旋转速度/(r·min-1) | 1 547.0 |
| 尾推桨位置/m | (-7.66, 0, 0) |
| 平尾气动中心位置/m | (-6.8, 0, 0.2) |
| 垂尾气动中心位置/m | (-6.8, 0, -0.5) |
表2 共轴高速直升机作动器位置及速率限制Table 2 Position and rate limitation of coaxial high-speed helicopter actuators |
| 操纵变量 | 位置限制/(°) | 速率限制/((°)·s-1) |
|---|---|---|
| 总距 | [0,20] | 40 |
| 总距差动 | [-5,5] | 40 |
| 横向周期变距 | [-6.25,6.25] | 40 |
| 纵向周期变距 | [-10,10] | 40 |
| 尾推桨总距 | [10,100] | 20 |
| 升降舵 | [-20,20] | 80 |
| 方向舵 | [-20,20] | 70 |
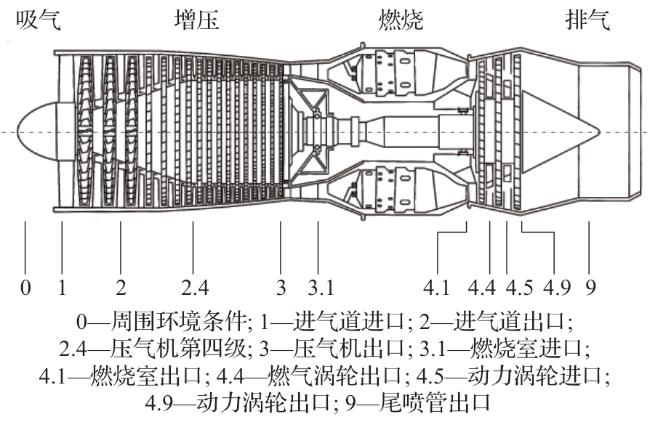
1.2 涡轴发动机模型
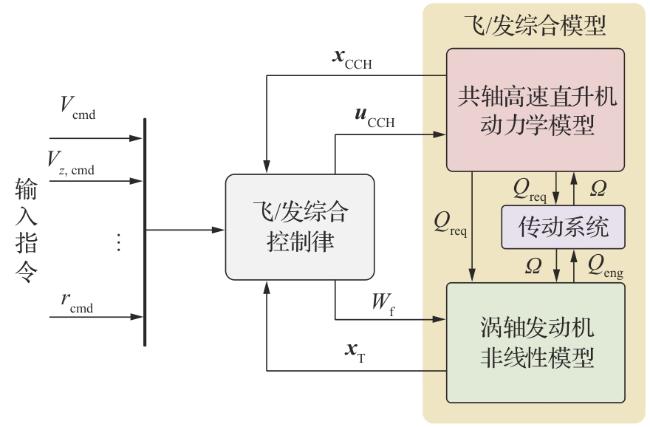
1.3 飞/发综合模型
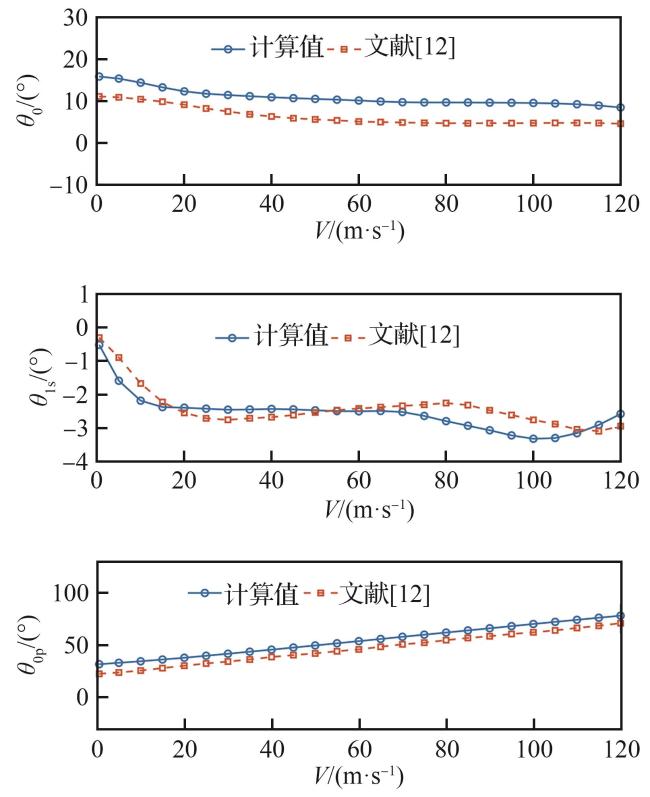
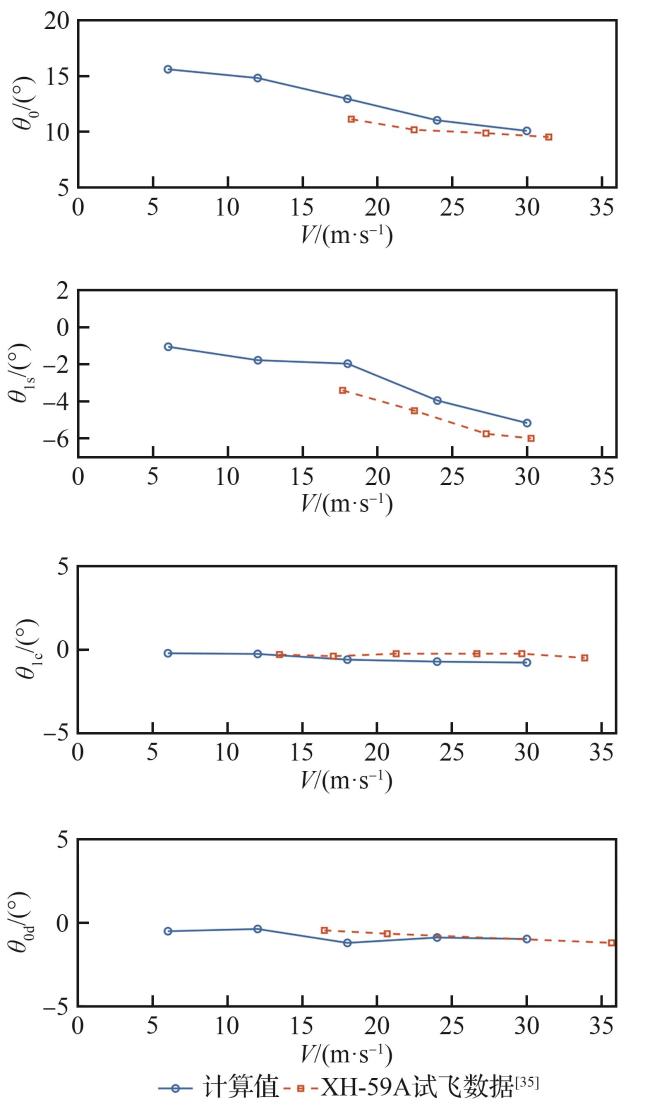
1.4 共轴直升机飞/发综合模型分析
2 飞/发综合鲁棒控制律设计
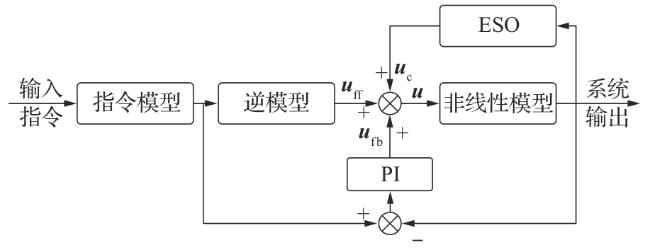
2.1 REMFC方法论及理论分析
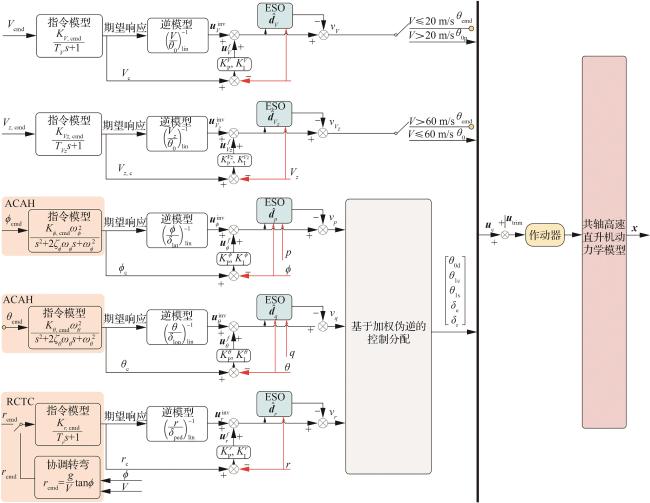
2.2 基于REMFC的直升机控制律设计
表3 共轴高速直升机全模态操纵策略Table 3 Control strategy of coaxial high-speed helicopter in all modes |
| 飞行模态 | 滚转 | 俯仰 | 航向 | 垂向速度 | 飞行速度 |
|---|---|---|---|---|---|
| 直升机模态(0~20 m/s) | 横向 周期 变距 | 纵向周期变距 | 总距差动 | 总距 | 俯仰角 |
| 过渡模态(20~60 m/s) | 纵向周期变距 升降舵 升降舵 | 总距差动 方向舵 方向舵 | 总距 | 尾推桨总距 | |
| 固定翼模态(60~120 m/s) | 升降舵 | 方向舵 | 俯仰角 | 尾推桨总距 |
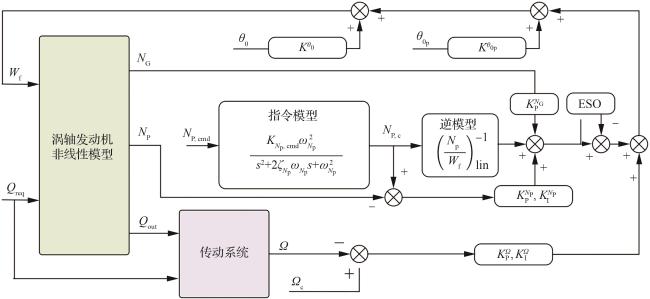
2.3 发动机控制律设计
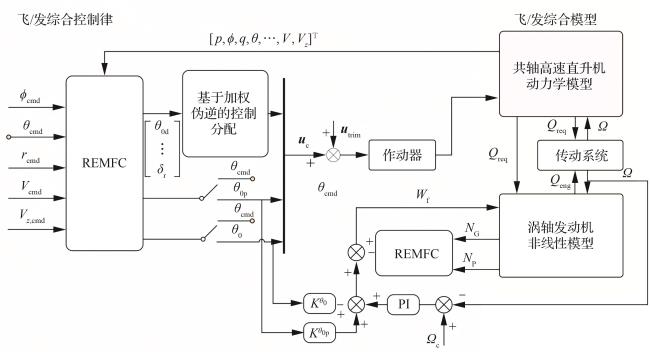
2.4 飞/发综合鲁棒控制方法架构
3 仿真结果与分析
表4 飞/发综合控制系统参数Table 4 Parameters of integrated flight/propulsion control system |
| 子系统 | 控制通道 | 指令模型参数 | PID控制器 | ESO 带宽 | ||
|---|---|---|---|---|---|---|
| 参数1 | 参数2 | 比例增益 | 积分增益 | |||
| 飞行控制 | 飞行通道(V) | TV =0.25 | =3 | =1 | 10 | |
| 垂向通道(Vz ) | =-5 | 10 | ||||
| 滚转通道( ) | =7 | 10 | ||||
| 俯仰通道( ) | =4 | 8 | ||||
| 航向通道( ) | =9 | 9 | ||||
| 发动机控制 | 动力涡轮(N P) | 10 | ||||
| 燃气涡轮(N G) | 0 | |||||
| 主旋翼( ) | =1 | |||||
| 总距前馈( ) | =2 | 0 | ||||
| 尾推桨总距前馈( ) | =2 | 0 | ||||
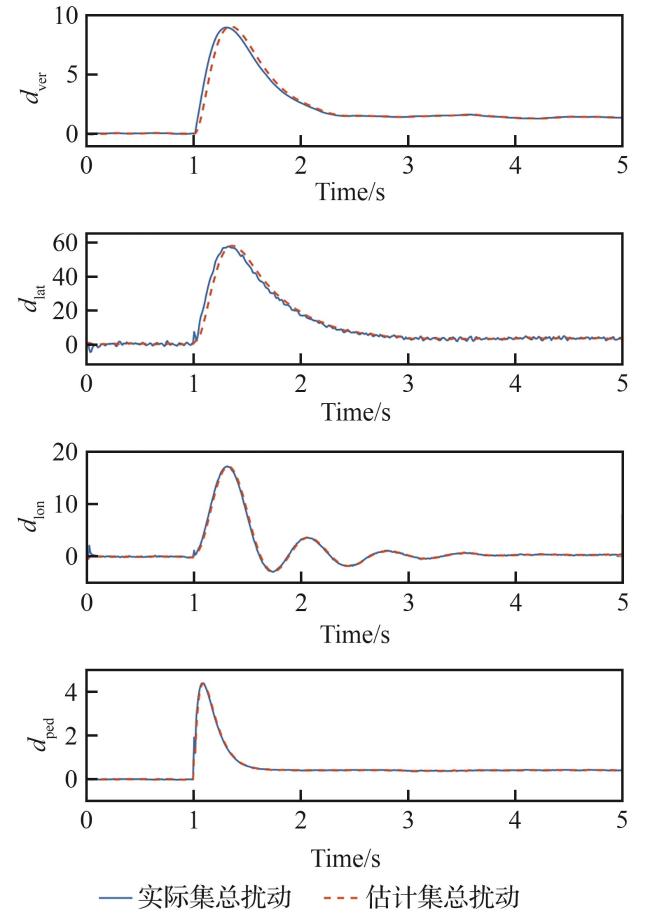
3.1 REMFC鲁棒性能验证
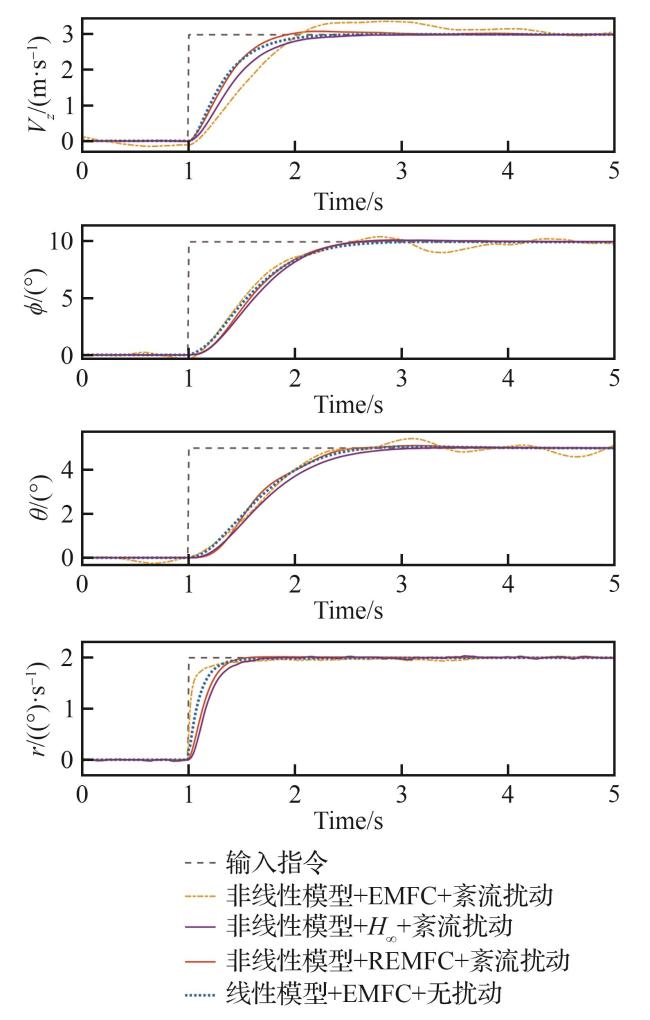
表5 不同控制方案的性能指标统计对比Table 5 Comparison of performance metrics statistics of different control schemes |
| 评价指标 | 通道 | 控制策略 | |||
|---|---|---|---|---|---|
| 非线性+REMFC | 非线性+EMFC | 线性+EMFC | 非线性+H ∞ | ||
| 超调量/% | 垂向 | 3.227 4 | 12.634 5 | 0.463 3 | 0.277 8 |
| 滚转 | 1.043 5 | 4.543 9 | 0.040 0 | 1.618 0 | |
| 俯仰 | 2.209 1 | 8.671 1 | 1.364 7 | 0.391 4 | |
| 航向 | 0.959 2 | 1.356 2 | 0.000 0 | 1.848 4 | |
| 调节时间/s | 垂向 | 1.750 0 | 4.170 0 | 1.900 0 | 2.050 0 |
| 滚转 | 2.280 0 | 3.660 0 | 2.360 0 | 2.290 0 | |
| 俯仰 | 2.310 0 | 2.380 0 | 2.570 0 | ||
| 航向 | 1.370 0 | 1.350 0 | 1.330 0 | 1.480 0 | |
| ISE | 垂向 | 0.138 8 | 0.854 6 | 0.088 5 | 0.312 7 |
| 滚转 | 0.265 0 | 0.585 8 | 0.111 8 | 0.574 3 | |
| 俯仰 | 0.132 6 | 0.273 1 | 0.049 3 | 0.274 7 | |
| 航向 | 0.013 7 | 0.096 1 | 0.007 9 | 0.041 2 | |
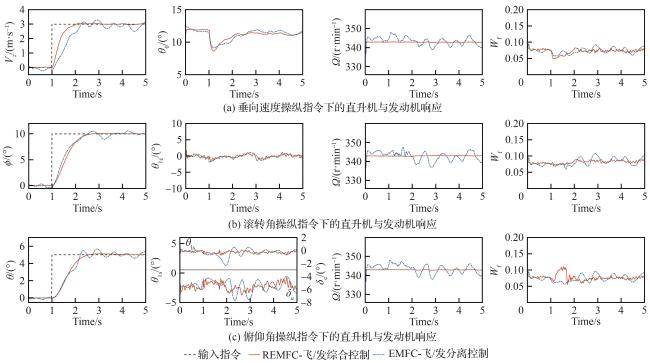
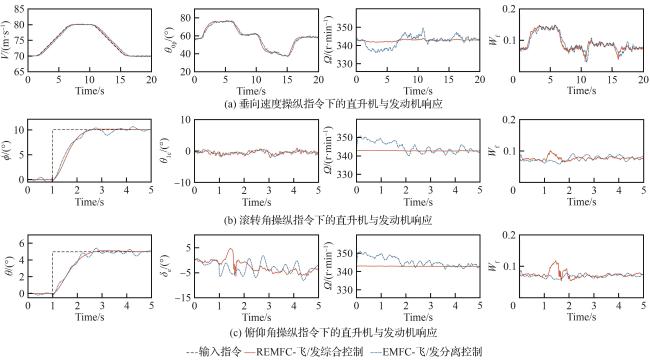
3.2 飞/发综合控制性能验证
表6 控制策略说明Table 6 Control strategy description |
| 控制策略 | 控制方法 | |
|---|---|---|
| 飞行控制 | 发动机控制 | |
| REMFC-飞/发控制 | REMFC | REMFC |
| REMFC-飞行控制 | REMFC | EMFC |
| REMFC-发动机控制 | EMFC | REMFC |
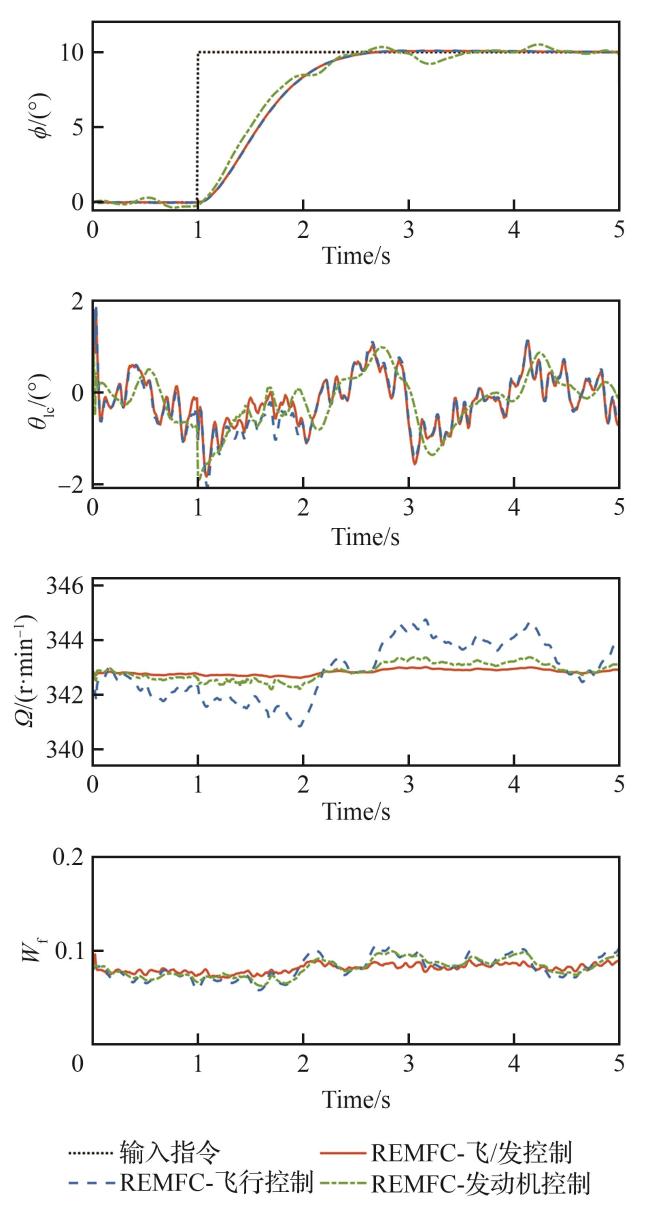
表7 滚转姿态指令跟踪性能Table 7 Roll attitude command tracking performance |
| 评价指标 | 飞/发综合 | 飞行控制 | 发动机控制 |
|---|---|---|---|
| 超调量/% | 0.860 3 | 0.931 6 | 5.103 9 |
| 调节时间/s | 2.310 0 | 2.370 0 | 4.260 0 |
| ISE | 0.172 1 | 0.193 8 | 0.980 1 |
表8 旋翼转速保持性能Table 8 Rotor speed regulation performance |
| 评价指标 | 飞/发综合 | 飞行控制 | 发动机控制 |
|---|---|---|---|
| ISE | 0.052 2 | 5.223 1 | 0.475 8 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
表9 40 m/s不同控制策略的指令跟踪性能Table 9 Command tracking performance under different control strategies at 40 m/s |
| 通道 | 超调量/% | 调节时间/s | ISE | |||
|---|---|---|---|---|---|---|
| REMFC- 飞/发综合 | EMFC- 飞/发分离 | REMFC- 飞/发综合 | EMFC- 飞/发分离 | REMFC- 飞/发综合 | EMFC- 飞/发分离 | |
| 垂向 | 2.227 3 | 9.743 9 | 1.850 0 | 0.074 7 | 1.200 8 | |
| 滚转 | 0.860 3 | 6.134 7 | 2.310 0 | 4.320 0 | 0.172 1 | 1.090 5 |
| 俯仰 | 2.306 3 | 13.497 5 | 2.320 0 | 0.054 8 | 0.418 4 | |
表10 40 m/s不同控制策略的旋翼转速保持性能Table 10 Rotor speed regulation performance under different control strategies at 40 m/s |
| 通道 | ISE | |
|---|---|---|
| REMFC-飞/发综合 | EMFC-飞/发分离 | |
| 垂向 | 0.014 1 | 22.622 4 |
| 滚转 | 0.052 2 | 29.347 6 |
| 俯仰 | 0.035 4 | 28.909 7 |
表11 70 m/s不同控制策略的指令跟踪性能Table 11 Command tracking performance under different control strategies at 70 m/s |
| 通道 | 超调量/% | 调节时间/s | ISE | |||
|---|---|---|---|---|---|---|
| REMFC- 飞/发综合 | EMFC- 飞/发分离 | REMFC- 飞/发综合 | EMFC- 飞/发分离 | REMFC- 飞/发综合 | EMFC- 飞/发分离 | |
| 速度 | 0.328 9 | 4.575 6 | ||||
| 滚转 | 1.235 0 | 6.060 7 | 2.290 0 | 4.300 0 | 0.311 7 | 1.584 0 |
| 俯仰 | 2.732 3 | 8.811 3 | 2.410 0 | 4.510 0 | 0.036 8 | 0.216 7 |
表12 70 m/s不同控制策略的旋翼转速保持性能Table 12 Rotor speed regulation performance under different control strategies at 70 m/s |
| 通道 | ISE | |
|---|---|---|
| REMFC-飞/发综合 | EMFC-飞/发分离 | |
| 速度 | 4.617 9 | 180.387 7 |
| 滚转 | 0.065 7 | 62.230 6 |
| 俯仰 | 0.049 8 | 65.842 0 |