
直升机尾传动系统是尾旋翼获得动力的唯一传递路径,它是直升机系统不可或缺的部分[1]。由于其结构形式复杂、传动链长,导致在极端工况下更容易发生机械故障。尾传动系统的故障会降低直升机运行寿命和威胁人员安全,因此对直升机尾传动系统进行健康监控是必要的。但是,由于直升机的工况复杂、数据保密,导致获取高质量丰富特征的故障数据需要付出巨大的代价。另外,当直升机发现新的故障时,传统迁移学习模型泛化能力减弱。因此有必要研究在极端数据条件下(源域没有测试数据,目标域有测试数据),如何提升直升机尾传动系统故障诊断模型的泛化能力。
直升机传动系统的故障诊断方法主要分为:统计分析、信号处理、机器学习及深度学习。在直升机传动系统早期故障研究中,数学统计方法依托概率分布与参数估计,在噪声干扰较强的场景下有效识别异常状态,成为最先被应用的诊断策略之一。Elasha等[2]通过自适应滤波、谱峭度及包络分析等信号分离技术,对大型CS-29直升机主减速器行星轴承的振动与声发射数据进行联合监测,实现了在强齿轮噪声背景下的早期缺陷识别。Zhou等[3]通过多种频域处理技术,对CH-46E直升机主减速器振动数据进行分析,成功识别了行星轴承内外圈缺陷。尽管统计方法具备良好的抗噪能力,但在面对复杂非线性系统和动态环境时,对高维特征的提取与适应性仍受限,难以满足现代直升机系统的智能诊断需求。
随着数字信号处理技术的不断演进,各种时域、频域信号分析策略被广泛应用于直升机振动信号的故障模式提取中,为信号特征精细化表达提供了技术支撑。Sawalhi等[4]建立了一种用于隔离和增强轮缘裂纹特征,并追踪行星齿轮的裂纹增长直升机传动故障处理方法。张新等[5]设计了一种基于最大平均峭度的盲解卷积方法,直升机故障诊断案例表明其能有效恢复故障冲击序列,增强故障特征提取能力。信号处理方法在特征提取方面具备良好的通用性与适配性,但其严重依赖于人工规则与经验参数设计,缺乏数据驱动下的自动建模能力,限制了诊断泛化性能。
为弥补传统方法对特征构造的高度依赖,机器学习方法引入数据驱动思想,能够从大规模数据中自动学习判别模式,提升了对复杂工况与非线性特征的适应能力。Kong等[6]通过基于数据驱动字典设计的稀疏分类方法,实现了在强调制和齿轮干扰背景下对行星传动系统行星轴承故障的高精度智能识别。谢习华等[7]提出了一种基于粒子群优化和广义回归神经网络的直升机旋翼不平衡故障诊断方法。尽管机器学习模型展现出一定的泛化能力和智能化水平,但仍需依赖特征工程环节。
近年来,深度学习凭借其端到端建模能力和强非线性学习能力,已成为直升机传动系统智能故障诊断的重要研究方向,尤其在处理高噪声、复杂非线性信号方面表现出显著优势。Li等[8]提出了一种基于自适应通道加权卷积神经网络的多传感器融合方法,实现直升机传动系统的状态监测。Sun等[9]建立了一种基于多传感器图自适应联邦泛化的方法,用于解决直升机传动系统复杂结构带来的故障诊断挑战,同时保护数据隐私。余志锋等[10]提出了一种基于K-最近邻(K-Nearest Neighbors, KNN)算法的卷积神经网络模型,有效提升了直升机滚动轴承的故障诊断能力。李恒等[11]建立了一种基于数字孪生与迁移学习的故障诊断方法,采用基于高斯核函数的领域自适应方法,以缩小仿真数据与实验数据在特征空间的分布差异。尽管深度模型具备自动特征提取与强鲁棒性优势,然而,现有基于深度学习的直升机传动系统故障诊断方法普遍面临2个关键挑战:一是故障数据获取困难,真实工况下高质量、多场景的故障样本极度稀缺;二是仿真域与测试域之间存在显著分布差异,严重限制了模型在实际工况中的泛化能力。因此,如何在小样本下缩小仿真和测试数据的分布差异,已成为基于深度学习的故障诊断亟待突破的关键问题。
为了解决上述问题,本文提出了一种新的自适应权重多级融合图域泛化(Adaptive-weight Multi-level Fusion Graph Domain Generalization, AMFGDG)故障诊断方法。该模型使用自适应权重多级融合挖掘不同粒度的特征,最后实现仿真域的图特征迁移到测试域。提出的AMFGDG故障诊断方法的创新点总结如下:
1) 提出了一种AMFGDG域泛化方法,实现仿真域到测试域的知识迁移,并使用2个数据集验证其有效性。
2) 设计了一种混合专家门控图特征融合策略,能同时捕捉不同粒度下的图特征,提升模型特征提取能力。
3) 结合有限元法与集中质量法,建立了一种高保真系统级的故障数据生成方法,并通过实验验证了其有效性。
1 相关工作
1.1 多源域泛化
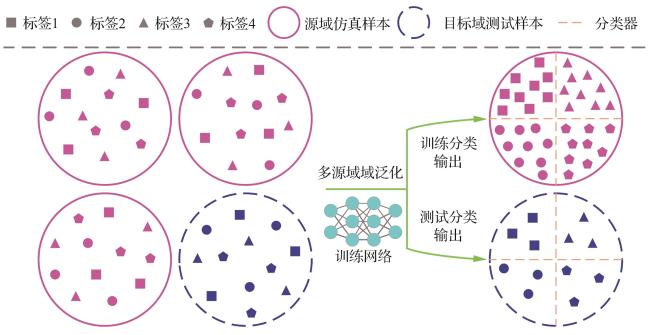
在现实世界中源域和目标域的数据分布存在领域偏移是不可避免的。多源域泛化旨在从多个源域学习故障诊断的域不变知识,并将其迁移到从未见过的目标域,多源域泛化任务如图1所示。
当前已有许多学者对故障诊断领域的域泛化问题进行深入研究。Li等[12]针对无监督对抗学习通常无法生成多模式故障样本,并存在模式坍塌等缺点,提出了一种有监督改进辅助分类器对抗网络。Guo等[13]引入了一种基于CycleGAN的域生成模块,以产生与源域有显著差异的扩展域,从而增强模型的泛化能力。Li等[14]针对在实时跨域故障诊断中,无法提前获得测试数据,提出通过水平缩放时间振动数据,人为地创建额外虚假域的域增强方法来扩展可用数据集。Fan等[15]采用基于mixup的数据增强来变换故障数据,从而补偿不同类别和域空间中缺失的信息,并增加类别和域空间的多样性。Zhao等[16]针对在实时跨域故障诊断中,目标数据无法提前获取,通过全局分布对齐和局部类别聚类来学习域不变知识并获得判别性表示。Shi等[17]阐述了一种结合动态加权策略和批量谱惩罚正则化项的对抗训练方案,以便从具有潜在差异的多个源域中提取域不变和判别性特征。Jia等[18]提出了一种名为因果解耦域泛化方法,通过结构因果模型将时间序列数据解耦为因果因素和非因果因素来重建数据生成过程。
1.2 图神经网络
由于图神经网络能表示非欧几里得空间的数据关系,近期有许多故障领域的学者使用图神经网络提取有相互依赖关系的数据特征。Li等[19]建立了一个基于图神经网络的新型智能故障诊断框架,并提供了开源代码。Chen等[20]提出了一种半监督自纠正图神经网络,能够有效地从振动信号中提取特征,并生成故障知识的图结构表示。Yin等[21]提出了一种多尺度图卷积网络,解决了忽略不同尺度信号之间潜在的关系问题。Wang等[22]在缺乏足够标记数据的情况下,提出了一种名为双图神经网络的新型少样本学习方法,并使用残差块来解决有限数据下的故障诊断问题。Wang等[23]提出了一种考虑多传感器信号的结构信息具有注意力感知模块的新型时序-空间图神经网络,以实现多源信息融合。Liu等[24]提出了一种因果干预图神经网络框架,使用注意力机制将传感器信号构建成结构属性图,并设计了一个工具变量来实施因果干预以减轻混杂效应。Liu等[25]提出了一种基于简化图卷积神经网络的半监督元学习少样本轴承故障诊断方法。考虑每个频谱样本作为一个节点,根据节点之间的邻接关系构建KNN图,从而将轴承故障分类转化为图节点分类。Li等[26]为了充分利用多域特征的优势,提出了一种结合时域和频域特征的多视图图神经网络,用于多传感器旋转机械系统的故障诊断。李晖等[27]提出基于遗传进化构图的联邦图卷积网络方法,通过联合学习与自适应图结构优化,有效提升了跨客户端故障诊断的准确性与泛化能力。
1.3 基于动力学的数据生成
由于基于物理模型的数据生成方法有较强的解释性和评估模型质量相对容易,当前用于故障数据生成的方法主要是集中在物理模型驱动的方法,主要分为集中质量法、有限元法及相关混合方法。Qin等[28]设计零件级滚动轴承动力学模型,并基于嵌入物理知识的故障诊断网络实现模型参数反演,进而建立数字孪生驱动的故障数据生成方法,生成多工况高质量故障样本以解决样本不平衡问题。Yu等[29]构建零件级滚动轴承动力学模型生成仿真样本,并结合双向长短期记忆网络与多头注意力机制设计CycleGAN变体进行时序故障数据映射,实现在无实测故障数据条件下的高质量类型可控生成。Ming等[30]提出滚动轴承零件级数字孪生辅助数据融合策略生成增强样本,并结合频域过滤子域自适应网络实现数字孪生数据与实测数据的特征对齐,构建适用于类别不平衡场景的深度诊断框架。张锐奇等[31]构建了具有明确时频域故障特征的四自由度轴承动力学模型,生成可表征实际故障的仿真数据,并基于对抗式域自适应网络实现仿真源域与实测目标域的特征对齐。于树博等[32]提出零件级动力学仿真驱动的特征分离型域自适应诊断方法,实现了小样本滚动轴承故障识别。Xu等[33]设计紧固杆转子系统的部件级集中参数模型并结合故障数学模型进行仿真数据生成,建立面向样本稀缺问题的智能诊断框架。张龙等[34]利用有限元法生成多工况多故障类型仿真数据,构建故障投影矩阵以同步去除实测信号中的工况冗余特征,最终结合支持向量机实现高精度故障识别。Wang等[35]设计系统级旋转矢量减速器数值模型并通过鲸鱼优化算法进行参数识别,引入噪声生成网络修正仿真数据,最终基于多任务残差网络实现仿真驱动下的故障类型与严重程度联合识别,有效解决了样本缺失与分布差异难题。肖刚等[36]构建了包含导轨故障激励的电梯轿厢水平系统动力学模型,生成多工况下的水平振动仿真数据,并结合子领域自适应残差卷积网络,实现了在无监督条件下的导轨故障诊断迁移。
基于动力学建模的数据生成策略,具有可解释性好、可控性好的特点,因此选择采用面向直升机尾传动系统的系统级动力学建模策略,以构建高保真的故障数据生成模型。
1.4 域泛化任务定义
给定K个源域 , 中, 表示第k个源域的第i个数据样本; 表示第k个源域的第i个样本标签; 表示第k个源域的第i个数据样本的域标签; 表示第k个源域样本数量。
类似的, , 中, 表示第k个目标域的第i个数据样本; 表示第k个目标域的第i个样本标签,在训练中不可见; 表示目标域标签; 表示第k个目标域样本数量。文中源域和目标域数量K分别设置为3和1。源域和目标域的数据特征空间和标签空间相同 , ,但是它们的联合概率分布不同 。本文的域泛化类型属于同质、跨工况和源域标签均可见的域泛化,其目标是学习一个映射函数 ,该函数学习不同源域的不变域特征,并能在未知目标域实现最优的泛化表示。
2 提出的AMFGDG方法
2.1 提出方法框架
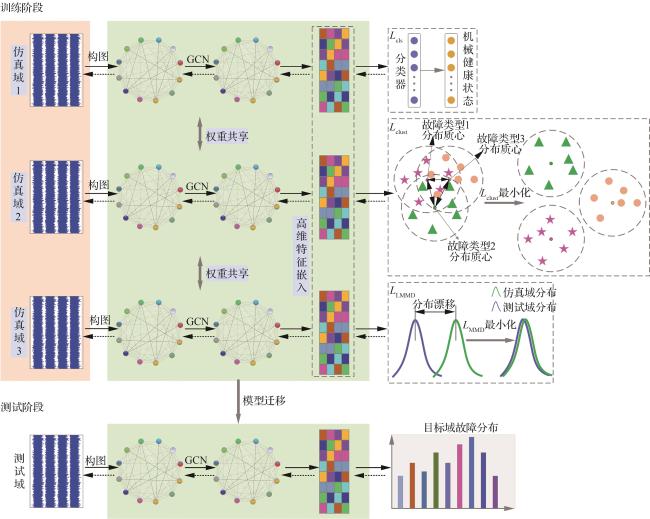
用于直升机尾传动系统故障诊断的图域泛化方法AMFGDG框架如图2所示,提出的AMFGDG故障诊断框架包含使用仿真域图网络的训练阶段和使用测试域图网络的测试阶段。训练阶段,基于有限元节点和对应传感器构建空间图,使用图卷积网络进行图特征更新,使用分类器损失函数L cls对源域故障类型分布进行预测,使用L LMMD损失函数衡量不同源域的全局故障分布差异,运用L clust损失函数对所有源域故障类型进行聚类,最后完成模型参数更新。基于源域训练好的模型参数,最终在目标域完成测试迁移任务,得到最终目标域的故障类型分布结果。
2.2 图构建策略
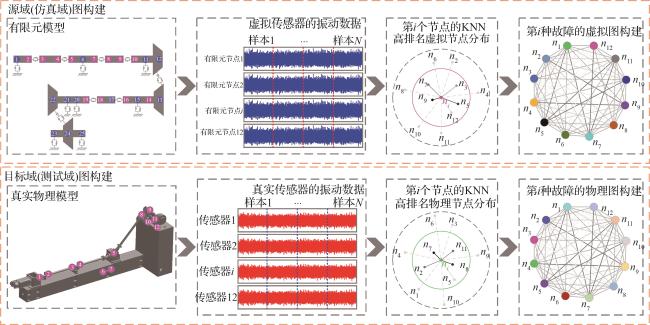
为了实现基于图网络的直升机尾传动系统故障诊断域泛化,需设计源域和目标域的图结构数据样本,如图3所示。以有限元模型中节点或测试平台的传感器作为图中的节点 ,以各节点的振动数据作为节点特征 ,运用KNN构建边,从而获得图特征驱动的图 。直升机尾传动系统数据集中图节点的特征是12个传感器或者对应有限元节点的振动数据;为了充分验证提出域泛化方法的跨工况泛化能力,还以西储大学轴承数据集的3个传感器或者对应有限元节点的振动数据作为图节点的特征。
为刻画节点之间在振动特征的相似性,采用原始振动数据 i 与 j 间的余弦相似度进行边构建,定义节点ni 与nj 的相似度为
式中: 表示二范数; 为余弦相似度算子。
对每个节点ni,选取余弦相似度最接近的前K个节点作为邻居,构建边连接关系可表示为
式中: 表示节点ni 与nj 无连接关系; 则表示有连接关系。
基于上述边构造,构成图网络的邻接矩阵 ,并最终形成图 。
2.3 图特征表征网络
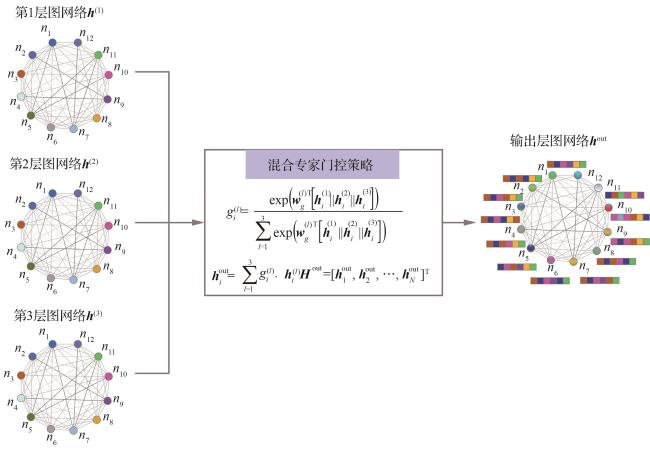
不同节点之间的动态影响强弱差异显著,因此引入自注意力机制建立能反应节点间影响强弱的自适应边权重。为了同时获取不同卷积层多尺度的语义信息,运用混合专家门控机制融合不同层的卷积网络特征,实现浅层与深层语义协同学习,避免硬融合产生的噪声冗余,图特征表征网络结构如图4所示。
为提升图建模中节点间信息传递的选择性,基于KNN图,进一步引入自注意力机制对已有邻接矩阵A赋予动态权重。
给定节点ni 、nj 的特征xi 、xj,使用线性变换将其分别映射为查询向量qi 、键向量kj :
式中: 为可学习的权重参数。
对于存在初始连接的节点对(ni, nj ),计算其注意力得分,可表示为
式中: 表示节点nj 对节点ni 的信息贡献度; 为节点i的邻接集合;d为缩放因子。
利用注意力机制计算出动态边权重后,构造新的带权重邻接矩阵 ,可重写为
从而形成最终的边加权图结构 。
给定加权邻接矩阵 与节点特征X,图卷积操作可表示为
式中:H (0)=X为初始图卷积层特征;H ( l )表示第l层的中间层特征;W ( l )为第l层的可学习权重; 为 的度矩阵;ReLU(·)是非线性激活函数。
接着通过混合专家门控融合机制对每一层输出引入门控权重 实现个性化加权。先将3层节点表示拼接为输入向量 表示为
式中: 表示节点i在图网络层l的特征向量;符号“||”表示拼接操作。
再通过线性变换与Softmax函数获得3层图卷积网络特征融合的门控系数
式中: 表示节点i的第l分支门控系数; 为第l分支的门控权重向量。
因此,单个节点融合后特征 可表示为
最后得出所有节点的输出 表示矩阵:
该输出特征将作为后面下游任务直升机故障诊断分类的特征输入。
2.4 损失函数与参数更新
为有效提升模型在尾传动系统多工况下的故障识别能力,联合采用三类损失函数来优化模型学习目标:监督分类损失L cls、分布对齐损失L LMMD以及深度聚类损失L clust。三者协同作用,既可增强模型的判别性,又能提升其跨域泛化能力与聚类表达结构的一致性。
1) 监督分类损失L cls
对于有标签样本,采用交叉熵损失衡量模型预测与真实标签之间的差异。模型输出为
式中: 为线性分类器参数; 表示类别概率矩阵。
接着,交叉熵损失函数定义为
式中: 表示第i个样本的one-hot真实标签; 为对应样本i的预测概率向量;c为故障类别数。
2) 分布对齐损失L LMMD
为缓解源域与目标域之间的分布差异,引入局部最大均值差异(Local Maximum Mean Discrepancy, LMMD)作为分布对齐损失[37]。设 、 分别表示源域与目标域中第c类节点的融合特征集合,则L LMMD损失定义为
式中: 、 分别为第c类在源域、目标域中的样本数量。
3) 深度聚类损失L clust
为了增强无标签节点在潜在语义空间中的聚类结构,基于深度聚类框架,引入基于KL散度的聚类损失[38]。定义样本hi 到聚类中心μj 的学生分布为
式中:qij 为第i个样本属于第j个聚类中心的概率;hi 表示第i个节点的融合特征;μ表示第j个聚类中心的可学习向量;β为学生的t分布自由度参数;K为聚类中心总数。
根据学生分布,进而定义目标分布:
式中:pij 为构造的目标分布。
因此,聚类损失函数L clust可以表示为
最后模型的总损失函数可以表示为
式中:L total是总损失函数;λ 1、λ 2为损失权重超参数。
因此模型参数更新可以表示为
式中:θ GCN表示图卷积网络权重参数;θ MoE为混合专家模型的权重参数;θ cls是分类器权重参数;θμ 表示可学习聚类中心的权重参数;θ att是自注意力机制权重参数;η是学习率; 表示损失函数对参数θ的梯度算子。
2.5 故障诊断流程
3 故障诊断实验
3.1 故障数据生成与验证
为了实现基于动力学生成的仿真域(源域)到测试域(目标域)的知识泛化,运用动力学建模方法生成了不同故障类型的振动数据,并基于直升机尾传动试验台验证了该数据生成方法的有效性。
3.1.1 高精度故障数据生成策略
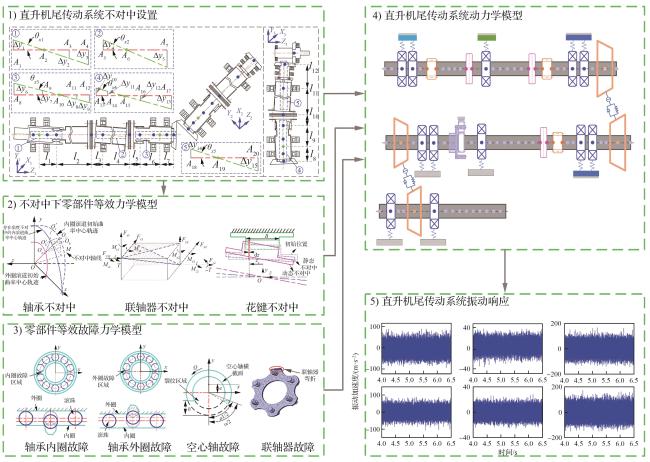
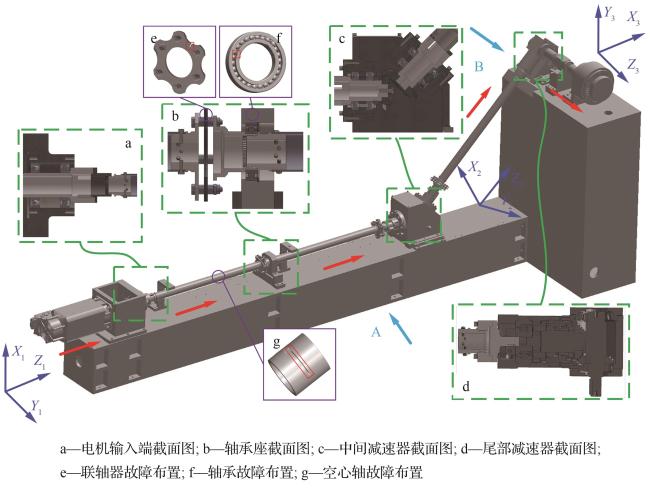
为了运用动力学生成故障数据,完成仿真域到测试域的泛化任务,需建立高保真的直升机尾传动系统动力学模型,图6显示了直升机尾传动系统的三维结构。坐标系X 1 Y 1 Z 1为水平轴的局部坐标系,坐标系X 2 Y 2 Z 2为斜轴的局部坐标系,X 3 Y 3 Z 3为尾桨轴的局部坐标系。这里需要指出的是后面动力学建模是在各自局部坐标系下建立的,这是为了和传感器的方位保持一致,可降低建模难度。红色箭头表示该尾传动系统的功率流向。
现实环境中直升机传动系统长久运行,会导致系统不对中情况,不对中会改变零部件的等效力学模型。因此有必要表征反映随不对中变化的等效刚度。此外,植入不同零部件的故障特征,建立含不对中和故障综合影响的直升机尾传动系统动力学模型,并运用Newmark-β方法求解各个节点的振动响应。但是,该数据生成方法存在输入扰动与背景噪声难以描述、动力学建模的边界条件难以准确获取、各个零部件动力学模型的非线性和时变性难以表征的弱点。
3.1.2 故障数据精度验证
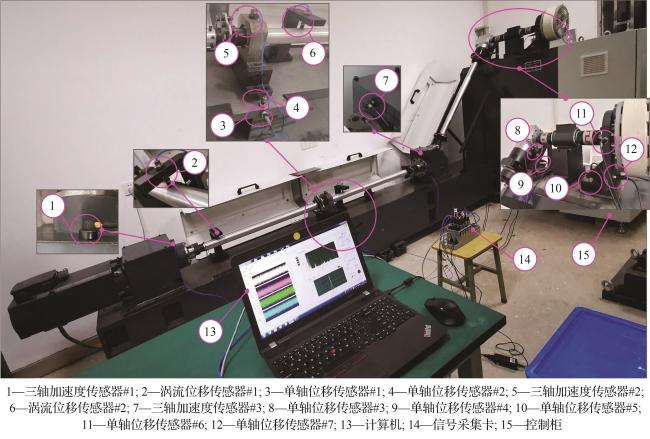
为验证上节中故障数据生成策略的有效性,搭建了直升机尾传动实验台,如图7所示。该试验台由试验台样机、私人电脑、采集卡、不同传感器、控制柜组成,其中试验台传动系统由电机、水平轴段、斜轴段、输出轴段及制动器组成。数据采集的采样频率为25 600 Hz,采样时间为30 s。试验台上布置了3个三轴加速度传感器、2个涡流位移传感器和7个单轴加速度传感器。实验台分别采集了在负载扭矩为0、20 N·m,转速分别为500、1 000、1 500、2 000、2 500、3 000、3 500、4 000 r/min工况下的不同故障数据,故障诊断泛化任务仅使用了部分工况数据。电机启动驱动水平轴旋转,通过中间减速器功率传递到尾部斜轴,接着功率流过尾部减速器到达尾桨轴,尾部的磁粉制动器模拟在运行过程中的负载效应。当某个工况稳定运行下,采集30 s的振动数据,使用电脑端的采集程序保存数据,并通过控制柜关闭电源,替换故障件,重复进行以上实验。
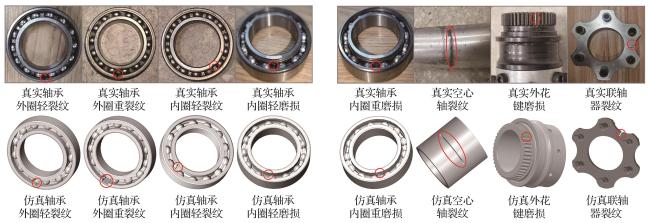
为了验证基于动力学生成的域泛化故障诊断方法的有效性,采集了4个零部件的8种故障类型,零部件故障类型如图8所示。故障类型包括轴承外圈轻度和重度裂纹,内圈轻度裂纹,内圈轻度和重度磨损,空心轴裂纹,外花键磨损,联轴器裂纹。
为了验证基于动力学机理的数据生成方法的有效性和精确性,对比了轴承内外圈、联轴器及空心轴裂纹4种故障下的测试振动响应和动力学振动响应结果。以3 000 r/min、20 N·m运行工况为响应对比试验工况,给出了4种单一故障不同方位的振动频域响应对比,如图9所示。
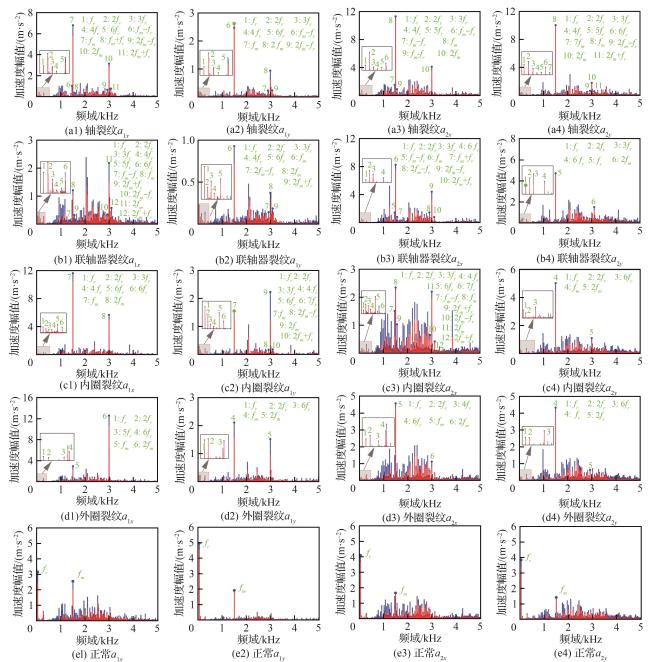
图9显示了不同健康状态下的径向振动频率成分,可看出相同测点的x、y方向的频率成分基本一致。由于不同的振动传递路径,传感器1和传感器2位置的振动频率成分有明显的差异,传感器2有更多的频率成分,可能是在靠近齿轮箱的地方有更多的噪声。健康状态下2个传感器不同方位均体现出较大转频fr 和啮频fm 幅值。然而,当存在轴、叠片联轴器裂纹的时候,频率成分主要表现为转频fr,及其倍频2fr 、3fr 、4fr 、5fr 、6fr,还有啮频成分fm 和倍频2fm,另外还发现fm ±fr 和2fm ±fr 边频成分。所以这2种的频率成分类似,对其故障分类是比较困难的。当存在轴承内圈裂纹的时候,频率成分主要表现为转频fr,及其倍频2fr 、3fr 、4fr 、5fr 、6fr,还有啮频成分fm 和倍频2fm,另外还发现fm ±fr 和2fm ±fr 边频成分,另外还体现出轴承内圈故障频率fbi,令人意外的是传感器3y方位并没有体现出fbi,这可能是因为噪声淹没了该频率成分。当存在轴承外圈裂纹的时候,频率成分主要表现为转频fr,及其倍频2fr 、3fr 、4fr 、5fr 、6fr,还有啮频成分fm 和倍频2fm,另外还体现出轴承外圈故障频率fbo。可以看出当长轴、轴承、花键及联轴器发生故障时,会引入转频的高次谐波、啮频的高次谐波及其两者的调制频率成分,使得频率成分更加复杂,导致故障分类任务更具挑战性。
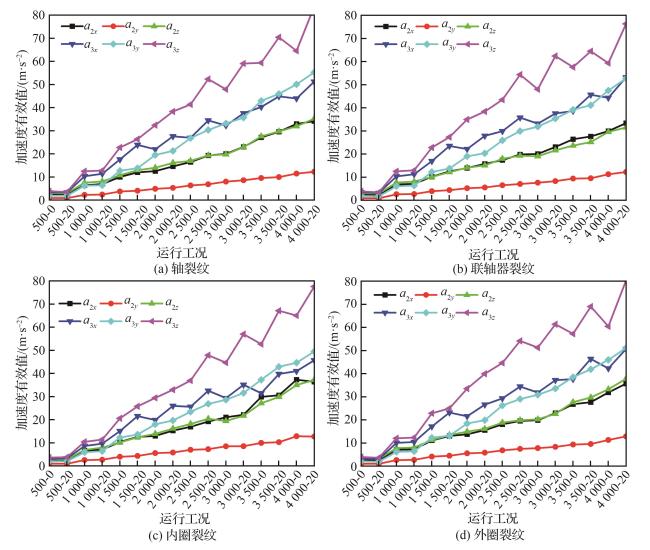
从图10中可以看出:无论那种故障形式,振动加速度RMS值随着转速的升高而变大。但是不同传感器的不同方位的RMS值变化的趋势缓急有明显区别。可以看a 3 z 的变化趋势最急,相反a 2 y 的变化趋势最平缓。不同传感器的数据具有不同的振动响应统计特征,因此在故障诊断分类的时候,有必要同时考虑不同传感器的振动数据。
3.2 故障数据集设置
表1 故障数据集设置Table 1 Fault dataset setup |
| 数据集名称 | 数据集简称 | 故障全称 | 故障简称 | 转速-负载 |
|---|---|---|---|---|
| 重庆大学直升机数据集 | 数据集A | 健康 | HY | 1 000 r/min-0(N·m) 1 000 r/min-20(N·m) 3 000 r/min-0(N·m) 3 000 r/min-20(N·m) |
| 轴承外圈轻度裂纹 | OLC | |||
| 轴承外圈重度裂纹 | OHC | |||
| 轴承内圈轻度裂纹 | ILC | |||
| 轴承内圈轻度磨损 | ILW | |||
| 轴承内圈重度磨损 | IHW | |||
| 空心轴裂纹 | HSC | |||
| 外花键磨损 | ESW | |||
| 联轴器裂纹 | CC | |||
| 西储大学轴承数据集 | 数据集B | 健康 | HY | 1 797 r/min-0(HP) 1 772 r/min-1(HP) 1 750 r/min-2(HP) 1 730 r/min-3(HP) |
| 轴承内圈轻度故障 | ILF | |||
| 轴承内圈中度故障 | IMF | |||
| 轴承内圈重度故障 | IHF | |||
| 轴承外圈轻度故障 | OLF | |||
| 轴承外圈中度故障 | OMF | |||
| 轴承外圈重度故障 | OHF | |||
| 轴承滚珠轻度故障 | BLF | |||
| 轴承滚珠中度故障 | BMF | |||
| 轴承滚珠度故障 | BHF |
表1设置了重庆大学直升机数据集、西储大学轴承数据集2个数据集。前者共有9种故障类型与4种工况;而后者共有10种故障类型与4种工况。
3.3 泛化任务与运行设置
表2 泛化任务设置Table 2 Generalization task setting |
| 数据集 | 泛化任务 | 源域(仿真域)工况 | 目标域(测试域)工况 | 源域(仿真域)标签 | 目标域(测试域)标签 |
|---|---|---|---|---|---|
| 重庆大学数据集 | T1 | 1 000-20, 3 000-0, 3 000-20 | 1 000-0 | 2,3,4 | 1 |
| T2 | 1 000-0, 3 000-0, 3 000-20 | 1 000-20 | 1,3,4 | 2 | |
| T3 | 1 000-0, 1 000-20, 3 000-20 | 3 000-0 | 1,2,4 | 3 | |
| T4 | 1 000-0, 1 000-20, 3 000-0 | 3 000-20 | 1,2,3 | 4 | |
| 西储大学数据集 | T1 | 1 797-0, 1 772-1, 1 750-2 | 1 730-3 | 2,3,4 | 1 |
| T2 | 1 797-0, 1 772-1, 1 730-3 | 1 750-2 | 1,3,4 | 2 | |
| T3 | 1 797-0, 1 750-2, 1 730-3 | 1 772-1 | 1,2,4 | 3 | |
| T4 | 1 772-1, 1 750-2, 1 730-3 | 1 797-0 | 1,2,3 | 4 |
本文的故障诊断泛化任务使用PyTorch深度学习框架在配置有英伟达GeForce RTX 3080 GPU和128 GB内存的计算机上实现。损失函数为CrossEntropy,优化算法为Adam,初始学习率为0.01,采用指数衰减策略。训练批次大小为256,训练迭代总数为200。损失函数超参数λ 1和λ 2分别设置为0.02、0.4。泛化任务中选择了4种经典方法作为基准,分别是领域对抗神经网络(Domain Adversarial Neural Networks, DANN)[40]、深度相关对齐(Deep CORrelation ALignment, DCORAL)[41]、带中心损失卷积神经网络(Convolutional Neural Networks with Center loss, CNN-C)[42]和条件对比域泛化(Conditional Contrastive Domain Generalization, CCDG)[43]。
3.4 实验结果分析与讨论
本节给出2个数据集下5种域泛化模型的对比实验结果与分析,随后给出提出模型AMFGDG的消融实验,验证模型每部分的有效性,最后给出超参数的敏感影响分析,分析出模型最佳超参数的组合。
3.4.1 诊断结果对比分析
表3 诊断精度对比Table 3 Comparison of diagnostic accuracy |
| 数据集 名称 | 泛化 任务 | 目标域精度/% | ||||
|---|---|---|---|---|---|---|
| DANN | DCORAL | CNN-C | CCDG | AMFGDG | ||
| 数据集A | T1 | 66.92 | 58.75 | 67.72 | 67.28 | 71.9 |
| T2 | 60.16 | 60.36 | 66.85 | 69.78 | 70.65 | |
| T3 | 74.70 | 73.51 | 74.78 | 73.49 | 81.87 | |
| T4 | 84.27 | 75.20 | 82.56 | 83.85 | 95.40 | |
| 数据集B | T1 | 50.54 | 71.11 | 77.62 | 75.62 | 86.32 |
| T2 | 55.52 | 70.43 | 69.86 | 70.04 | 82.59 | |
| T3 | 56.82 | 66.34 | 67.50 | 67.77 | 90.18 | |
| T4 | 56.71 | 64.52 | 74.86 | 73.66 | 88.25 | |
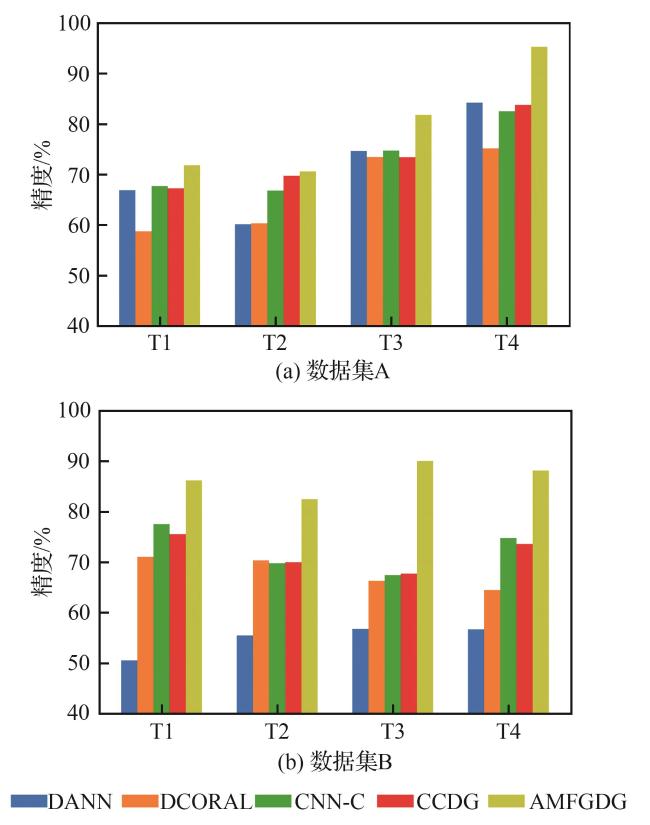
图12给出了在数据集A中泛化任务T4中不同域泛化方法的精度曲线。从精度对比曲线可以看出,AMFGDG方法在训练过程中始终保持领先,最终精度显著高于其他4种域泛化方法,表现出更优的收敛速度和泛化性能。
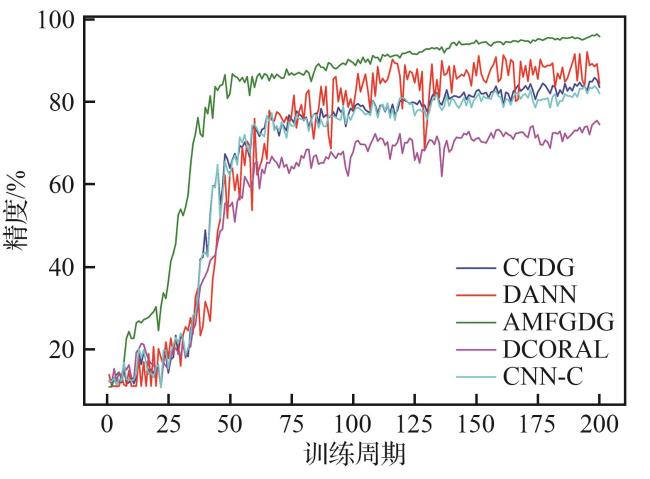
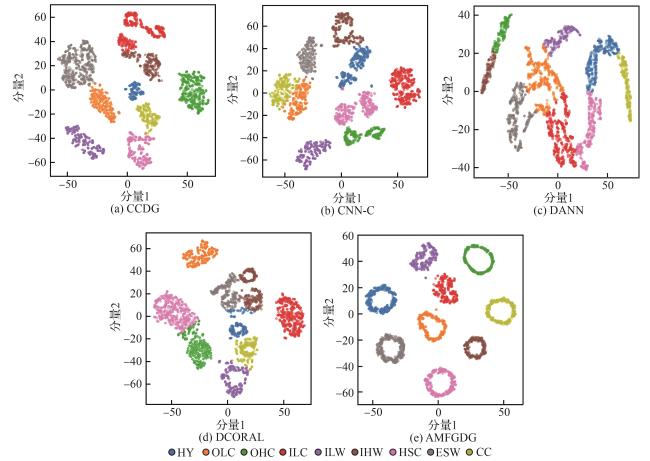
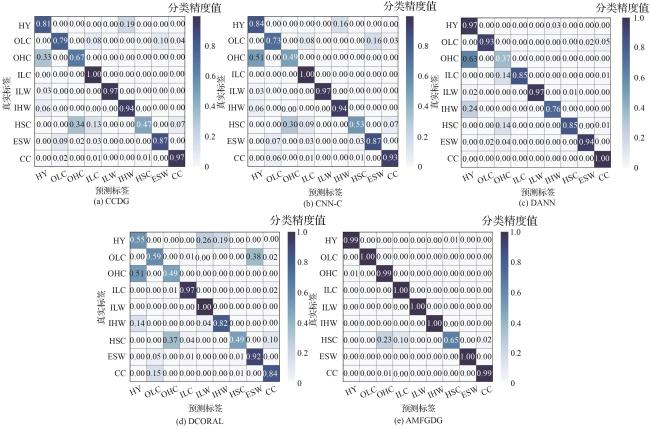
图13中,AMFGDG方法在目标域特征空间中表现出最佳的聚类分布和判别性,有效实现了不同故障类型的分离,显著优于其他4种域泛化方法。CCDG方法中,ILC故障特征簇明显分离,且它与IHW故障特征有部分重叠。CNN-C方法中,IHW、HY、HSC和OHC这4种故障特征簇明显分开,CC和OLC有少许重叠。DANN方法不同故障的边界没有明显区分开。DCORAL方法中仅OLC和ILC故障与其他故障存在明显边界。提出方法AMFGDG存在特征簇紧凑且边界明显分开的特点。
图14分析混淆矩阵可以发现,AMFGDG方法在所有故障类型上基本上表现出优异的分离效果,其分类结果明显优于其他方法,尽管提出方法在故障类型HSC的准确率只有65%。相比之下,DANN和CCDG也取得不错的分类效果,即使前者存在OHC故障类型的分类精度仅为37%,后者存在HSC故障类型的分类精度仅为47%。CNN-C方法相对于上面2种方法,诊断精度明显下降,而方法DCORAL则是取得了最差的诊断结果,其中有4种故障分类精度均低于60%。
3.4.2 提出模型消融实验
本节给出提出模型的详细消融实验设置与分析。消融模型实验设置为:模型A(L LMMD与L clust损失函数均无)、模型B(仅存在L LMMD损失函数)、模型C(仅存在L clust损失函数)和提出的模型(L LMMD与L clust损失函数都有),不同消融模型的诊断精度结果见表4。
表4 不同消融模型精度对比Table 4 Comparison of accuracy of different ablation models |
| 模型 | 模型A | 模型B | 模型C | 提出模型 |
|---|---|---|---|---|
| 精度/% | 76.28 | 84.67 | 94.78 | 95.40 |
表4显示提出模型的精度(95.40%)在所有模型中最高,分别比模型A、模型B和模型C提升了19.12%、10.73%、0.62%,说明其具有显著的性能优势。仅有L LMMD损失函数的模型B精度高于仅有L clust损失函数的模型C,说明全局分布对齐相对于局部聚类的作用更重要。L LMMD与L clust损失函数均不考虑的模型性能最差。
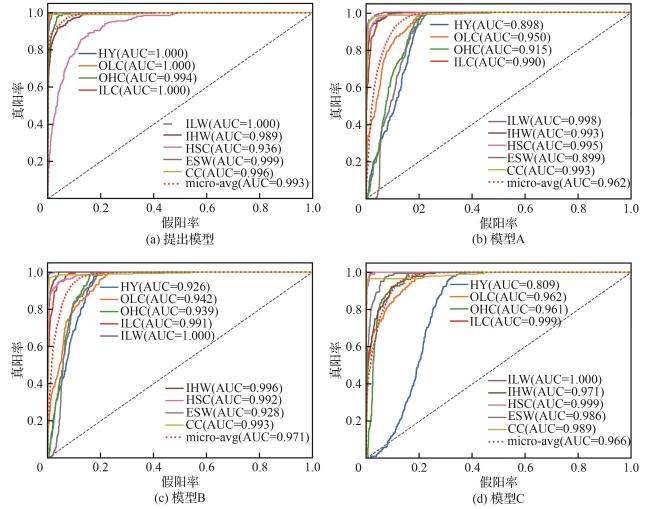
图15显示提出模型在所有故障类型上都能实现接近完美的区分效果,每一类别的AUC值均超过0.936,其中大部分类别甚至达到1.0,整体micro-avg的AUC高达0.993,反映出其出色的泛化性能与稳健性。2种损失均不考虑的消融模型A是性能最差的,micro-avg的AUC为0.962。仅考虑L clust的消融模型C的性能有少许提升,micro-avg的AUC为0.966,且故障类型HY出现明显波动。仅考虑L LMMD的消融模型B的性能有进一步提升,micro-avg的AUC高达0.971。
3.4.3 超参数影响分析
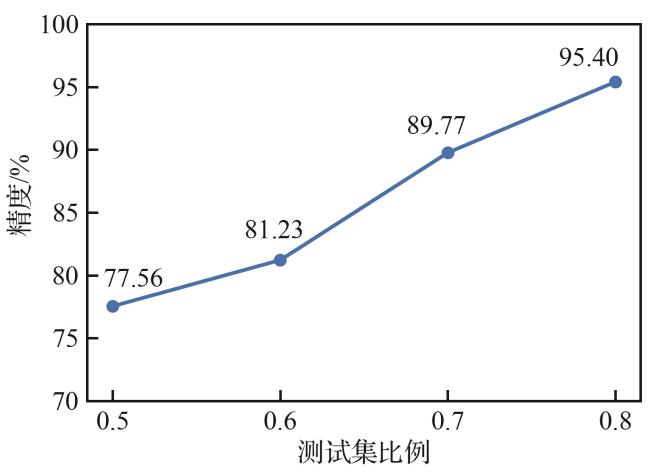
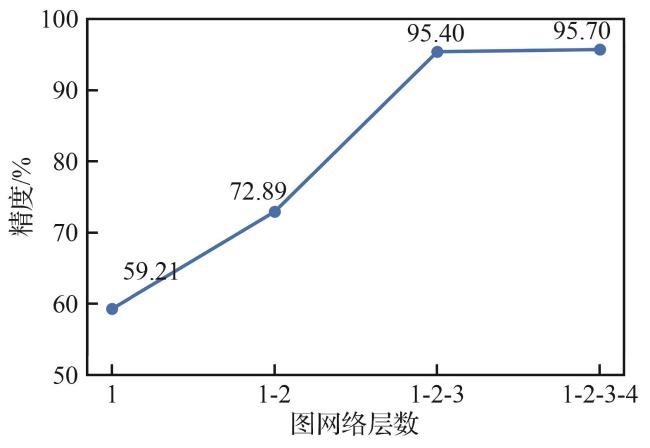
本节分析了样本划分比例和图卷积网络层数2种超参数对模型的影响,如图16和17所示。图16显示随着样本划分比例的增加,模型的精度持续显著提升。当样本划分从0.5提高到0.8时,精度由77.56%上升至95.40%,表现出较为线性的上升趋势。这表明,增加训练样本数量能够有效提升模型的分类准确率,充分的数据支撑对模型性能的提升具有重要作用。图17显示随着网络层数的增加,模型的精度显著提升,从单层结构的59.21%提高到混合层1-2-3结构的95.40%,说明多层混合结构能够更好地提取特征、提升分类能力。然而,当网络层数进一步增加到1-2-3-4混合层时,精度仅小幅提升至95.70%,呈现出性能趋于饱和的趋势。因此,合理选择不同网络层数混合对于模型性能优化至关重要,过多的不同层数混合并不会带来明显的精度提升。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
4 结 论
本文以自适应权重多级融合图网络作为特征提取器,监督分类损失、跨分布对齐损失以及深度聚类结构保持损失作为模型损失函数以更新权重系数,实现仿真域到测试域的泛化。主要结论如下:
1) 基于动力学模型的数据生成方法能高精度预测物理系统的振动响应。通过仿真数据与测试数据的频率成分对比,得出提出的数据生成方法不仅能体现出丰富频率成分,还能与测试数据的主要频率成分一致。
2) 提出的AMFGDG诊断模型,在2个数据集的域泛化任务上都能取得最好诊断结果。相对于其他4个域泛化模型,在数据集A上精度至少提升6.36%,在数据集B上精度至少提升15.56%。
3) 消融实验验证提出的模型各个模块都是不可替代的。随后,给出了样本划分比例和图卷积网络层数对AMFGDG诊断模型的影响规律。
未来的研究工作将进一步探索基于少量标签数据的无监督学习方法,以减少对高质量标注数据的依赖,并研究如何在更复杂的工程系统中应用AMFGDG框架。