
电液伺服机构(Electro-Hydraulic Servomechanism, EHS)广泛应用于液体火箭等大型航天设备的控制系统的执行机构[1-2],具有扭矩大、响应速度快、控制精度高的特点。EHS内部元器件涵盖机械、液压、电子等类别,组成结构复杂、电磁耦合性强,导致难以对其健康状态进行定量分析。同时,EHS往往工作在温度高、强振动冲击的环境下,其健康状态容易发生突变。然而,EHS承担着控制航天设备飞行过程中绕质心运动的重要功能,一旦发生故障将造成人员财产的重大损失。因此,对电液伺服机构的健康状态开展评估,可为设备健康管理[3-5]提供重要的决策依据,对于确保设备安全稳定运行具有重要作用[6-7]。
现有的健康状态评估方法基本可分为4类:基于定量数据的方法、基于定性知识的方法、基于半定量信息的方法和基于大规模自然语言处理模型的方法。
1) 基于定量数据的方法核心原理:当设备运行机理和退化模式过于复杂时,通过选取可监测的、能够反映设备健康状态的健康指标信息,构建健康评估模型,并基于大量监测数据辨识模型参数。董绍江等[8]根据改进卷积神经网络建立轴承健康状态识别模型,实现了轴承健康状态识别。邓超等[9]建立了一种基于维纳过程和马氏距离的健康状态评估模型,通过将性能退化轨迹转换到健康状态空间中,实现对装备健康状态的评估。魏梓轩等[10]通过皮尔逊算法挖掘电池老化特征与电池健康状态的相关特征,建立了基于深度学习网络的健康状态评估模型。宁梓呈等[11]通过提出局部模型辅助基于数据知识的方法,设计了伺服机构故障预测与健康管理(Prognostics and Health Management, PHM)分层体系结构,构建了伺服机构PHM系统模型。郑玉航等[12]提出了一种基于遗传算法优化BP神经网络的健康状态预测模型,有效实现了对EHS健康状态的预测。
2) 基于定性知识的方法核心原理:当无法获取设备足够的测试数据用于构建模型时,可依据设备工作机理、行业领域专家知识和历史经验,对设备进行健康状态评估。张晶晶等[13]综合变压器特点提出了一种基于模糊层次分析法的变压器状态评估方法,实现了变压器状态的准确评估。王语嘉等[14]采用T-S模糊故障树建模,提出了一种考虑多部件的离心泵健康状态评估方法,该方法相较于传统基于单部件的评估方法评估结果有了明显提升。
3) 基于半定量信息的方法核心原理:当设备过于复杂无法建立准确的数学、物理模型,并且无法获取足够的测试数据用于辨识参数时,可通过将少量的测试数据与定性的专家知识相结合从而建立准确的健康评估模型。廉正等[15]提出了一种基于置信规则库的加速度计评估模型,并通过弹道仿真的方法实现健康状态真实值的准确计算。赵文清等[16]基于贝叶斯网络建立了一种电力变压器健康状态量化分层模型,通过专家知识确定分层模型中各参数阈值和分值,较好的满足了工程需要。
4) 随着人工智能技术的快速发展,将大规模自然语言处理模型引入设备健康状态评估方法中逐渐成为研究热点。其核心原理:通过大规模自然语言处理模型对相关行业领域知识、设备运行状态记录文本、设备出厂说明等文本信息进行处理,提取其中与健康状态有关的信息并进一步融合、推理,最终实现设备的健康状态评估。邵滨[17]提出了一种结合自然语言处理的污水处理厂运行状态诊断方法,对污水处理领域知识与事件日志的信息提取,实现了对污水处理流程运行状态的实时评估。周志豪[18]基于注意力机制优化的卷积神经网络建立了变压器故障诊断与评价模型,实现了变压器故障的准确分类与运行状态评价。
然而,现有的健康状态评估方法取得一定的研究成果的同时也存在不足。基于定量数据的方法需要大量的各个工作模式下的设备运行测试数据支撑。然而,对于如EHS的此类高价值、高可靠度的复杂机电设备往往测试数据较少且缺乏足够的低健康状态数据样本,难以基于数据建立评估模型。基于定性知识的方法在设备内部结构机理复杂时往往难以建立准确的数学模型,若仅依赖专家知识和历史经验在模型参数确定时主观性较强,模型精度受经验和知识的可靠性、准确性影响较大。基于大规模自然语言处理模型的方法模型评估结果对于设备记录文本的真实性与准确性依赖较大,并且缺乏对于设备运行数据的有效利用,容易造成部分健康信息的缺失。综上,能够结合定量的测试数据和定性的专家经验的半定量信息的方法受到设备健康管理研究领域的广泛关注。证据推理规则(Evidential Reasoning rule, ER-rule)作为一种典型的基于半定量信息的方法,可从定量数据和定性知识中获取健康信息,即:在有限的低健康状态数据基础上,利用行业专家和技术人员在长期工作中积累的设备在亚健康、失效等低健康状态下运行表现作为健康信息的有效补充。通过将健康信息转化为证据并进行计算与推理融合,为低健康状态样本稀缺条件下的设备健康状态评估提供了思路[19-21]。
然而,目前基于ER-rule对EHS进行健康状态评估的方法主要根据EHS的测试数据对当前健康状态进行评估,该种方法存在以下局限性:① 健康状态评估准则较为泛化,对于具体设备缺乏针对性。例如:现有2台同型号的EHS,1台累计运行时间80 h,另外1台累计运行时间12 h。2台设备测试数据可能相同,如果按照传统基于测试数据的评估方法,2台设备健康状态处于同一评估等级。然而第1台设备的磨损程度必然远远大于第2台,其评估结论和维修策略应完全不同。② 健康信息来源片面,缺少对于设备维修维护的考虑。测试数据仅反映了设备在特定时间的健康状态,不是稳定的健康期。通常而言,电液伺服机构测试时间为30 min左右。假设某台EHS的关键部件,如蓄能器,曾反复故障且刚刚经过重大维修,在测试期间数据表现正常;然而,设备可能正处于一个性能急剧下降后的短暂恢复期,可能再次发生故障,因此不能作为一个稳定的健康状态结果。综上所述考虑设备的履历信息至关重要,它将EHS健康评估从一个静态的、针对特定时刻的结论,提升为一个动态的、“全寿命周期”的分析。
综合上述分析,基于ER-rule模型,在定量测试数据基础上充分考虑设备履历信息,同时综合利用专家定性知识,实现多源信息的融合的性能状态评估,主要研究内容为以下2个方面:
1) 电液伺服机构在日常运行、测试、维护过程中会产生大量的履历信息,其中包含着丰富的与设备健康相关的状态特征。然而,设备履历信息往往以文本的形式存储,并且文本中可能包含大量的无关信息以及因文本记录人的主观意识而产生的干扰信息[22],进而导致其无法被直接利用。因此,如何过滤履历文本中包含的无关信息和人为干扰信息,进而提取出具有高价值的设备健康状态特征是需要解决的关键问题。
2) 电液伺服机构结构复杂,内部元件电磁耦合性较强。并且由于其高价值性和高可靠性,测试数据较少且缺乏足够的故障样本。上述问题导致传统的基于ER-rule的健康评估模型缺乏大量的包含多种设备工作模态的测试数据,进而限制其评估精度。因此,如何将测试数据和提取的履历文本信息进行多源信息融合,进而对基于数据的评估结果进行修正同样是需要解决的关键问题。
综上所述,以EHS为研究对象,按照“履历信息提取→构建多源信息融合的评估模型→模型优化”的思路,提出多源信息融合证据推理规则健康评估模型(Evidential Reasoning rule with Multi-source Information Fusion, ER-MIF)。主要创新点包括:① 提出了一种基于(Bidirectional Encoder Representation from Transformers, BERT)大规模自然语言处理的履历文本信息提取模型,实现了从EHS履历文本中提取设备健康信息;② 提出了运行时间和维修等级影响因子,进而融合影响因子与EHS健康指标监测数据构建ER-MIF健康状态评估模型;③ 以模型输出误差最小为优化目标,提出参数最优化评估模型以提高评估精度。旨在扩展EHS健康信息获取来源,提高EHS健康状态评估精度,实现EHS科学健康管理。
1 履历文本信息提取模型
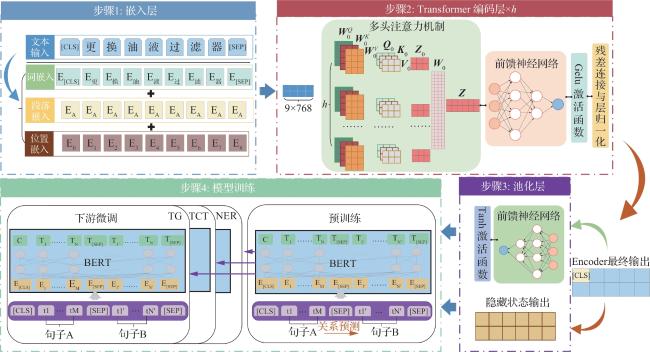
EHS履历文本信息包括:日常测试信息、维修维护信息、运输状况等,其中包含了大量能够反映设备退化和损耗情况的健康信息。考虑基于在Transformer框架下预训练好的BERT大规模自然语言处理与训练模型,对履历文本信息中包含的健康信息进行提取[23]。
1.1 履历文本特征分析
在EHS日常贮存、使用过程中,常见的履历文本可分为两大类:第1类是设备运行记录文本:主要记录设备运行时间以及设备运行有无异常状况等内容;第2类是设备维修保养记录文本,主要记录对设备的维修情况,包括设备名称、维修内容、维修时间地点等信息。
履历文本受到记录人员的主观因素以及EHS运行、维护情况的复杂性等影响,其主要特征包括:① 信息以非结构化形式记录,文本记录的信息没有统一的结构化表示,记录的形式结构较为多变。例如,某样本按照测试时间、设备名称、运行现象的结构表示;另一条样本则按照:设备名称、测试人员、测试时间、运行现象的结构表示。② 样本描述的不确定性,由于记录人员具有主观性和不确定性,同一故障或现象可能存在不同的样本内容。例如,同样针对EHS油滤堵塞这一现象,操作人员A描述的样本内容为油滤堵塞,需要更换;操作人员B描述为伺服机构动作出现卡顿现象,初步考虑为液压油液过滤器堵塞,建议更换滤油器后重新测试。③ 样本较为简洁,长度在百字以内,受记录载体和记录场所影响,履历文本信息的单个样本记录普遍较为简洁。以凝练的语言概括设备名称、时间、地点、维修维护内容、设备工作状态等,长度在百字以内。
所以,履历文本信息具有记录形式非结构化、样本描述不确定性强且内容较少等特点,导致难以通过人为指定特征提取规则的方式实现文本数据到特征的转换。因此,采用BERT预训练模型,通过词向量转换的方式使得模型能够进行自主抽象学习。
1.2 基于BERT的履历文本信息提取框架
BERT作为第一款通用的自然语言处理大模型,自2018年由Goole人工智能团队提出后便受到学术界的广泛关注[24],目前已经广泛应用于各类自然语言处理任务中。
BERT在自然语言处理任务中具有良好的性能表现。首先,BERT模型首次实现了双向上下文表征建模,能够理解履历文本信息中非结构化形式记录的复杂文本。其次,BERT通过“预训练知识迁移加少量标注样本微调”的策略能够实现小样本高精度信息提取,能够适应设备履历文本信息标注数据少这一现实约束。最后,BERT作为一种较为成熟的自然语言处理大模型拥有丰富的预训练模型和工具包可供选择,便于在工业实际场景中的快速部署。基于BERT的履历文本信息提取框架负责将非结构化的原始文本转化为结构化的健康信息数据,从而构建一个端到端的深度学习解决方案。结合BERT工作原理,详细介绍基于BERT的履历文本信息提取框架的具体工作流程,为后续下游微调策略设计等工作奠定理论基础。
式中: 为缩放因子,其大小等于输入维度除以注意力机制“头”数,作用为保持模型方差稳定性,保证模型训练效果。
将各“头”输出 进行叠加并与初始矩阵 相乘,得到最终输出 。将 输入前馈神经网络进行后续处理,最终以隐藏状态输出。
3) 池化层的主要作用为将整个输入序列的语义信息压缩为一个768维的向量表示,便于下游微调任务使用。池化层的工作模式分为2种:一种为简单池化,即将编码层的输出不进行任何处理直接输出。常用于不需要进行上下文语言推理的实体命名识别,情感分析等任务。另一种为附加线性层池化方式,提取编码层输出的[CLS]隐藏状态输入前馈神经网络和Tanh激活函数。
BERT各部分结构已定义完成,下一步进行模型训练以使得模型具备自然语言处理能力。
4) 预训练模型选用,预训练具体过程参照图1步骤4所示,主要过程包括预测被遮盖的字(Masked Language Model, MLM)和句子关系预测(Next Sentence Prediction, NSP)2个过程。MLM过程核心内容为通过随机选择语句中的某一个词或字词的token修改为“mask”,该过程称为遮盖;而后令模型预测被遮盖的token,使得模型具备学习上下文语义特征的能力。NSP过程核心内容为:输入未被标注的句子对“A”、“B”,其中语句“B”有50%的概率为语句“A”的下一句,50%的概率为随机语句。模型需要预测“B”是否为“A”的下一句,使得模型具备理解句子间关系的能力。经过上述2个过程的训练,模型具备通用语言处理的能力。
然而,预训练过程需要大量算力的投入和漫长的训练。因此在通常情况下直接使用公开的预训练完毕的模型。目前公开的预训练模型众多且适用的语言种类不同、模型规模大小不同。因此,基于处理的文本特点和处理任务针对性的选用预训练模型至关重要。由于EHS履历信息文本量相对较少且包含的设备不同工作模态信息匮乏,要求选用的预训练模型对于模型训练数据量要求较低。因此,预训练模型选(Reduced Bert Training, RBT)中文自然语言处理模型。RBT模型在2020年由哈尔滨工业大学智能计算研究中心提出。训练数据来源为中文维基百科和中文通用文本,模型参数总量约110 M。通过训练时动态选择信息量最大的句子,跳过冗余文本,使得训练所需数据量相较传统的BERT模型减少50%,同时保证在文本分类和实体命名等任务中性能达到原始BERT的98%左右。
5) 下游微调的核心思想为利用少量的针对特定任务的标注数据,调整预训练模型参数使其适配具体任务,如:文本生成任务(Text Generation, TG)、文本分类任务(Text Classification Task, TCT)、实体命名识别任务(Named Entity Recognition, NER)。每种具体任务设置的下游微调策略不同。例如文本分类任务需在预训练的模型后添加特定的任务输出层,如“全连接层+softmax函数”,将模型输出与分类标签值间建立映射。而实体命名任务则需将模型输出的每个token进行单独预测,而后将每个token分别接入分类层,如条件随机场层(Conditional Random Field, CRF),对每一个token预测其标签。详细过程将在下文结合具体任务进行说明。
综上所述,基于BERT的履历文本信息提取框架通过:“嵌入层,文本向量化 Transformer编码层,关键语义信息保留 池化层,语义信息压缩 预训练过程,具备通用语言处理能力 下游微调过程,完成特定任务”的工作流程,实现了将履历文本提取为健康信息的任务。
1.3 履历文本预处理
对收集的履历文本进行分析,文本中的人为干扰信息主要为记录人员对专有名词的缩写处理。履历文本的记录和判读人员对EHS的各部件和运行情况较为熟悉,因此出于便捷的考虑多对行业专有名词进行缩写。如:将“液压油泵”缩写为“油泵”,将“液压油液过滤器”缩写为“油滤”等。
然而,在进行信息提取时,缩写的信息可能作为一个单独的特征被提取,进而造成信息的冗余和干扰,浪费算力的同时也不便于后续决策人员对提取信息的判读。对履历文本进行预处理的主要工作为将文本中因记录人员的主观因素而缩写的专业词汇进行扩充,使记录的履历文本统一符合行业规范。主要步骤:
1) 缩略语词典构建,通过分析大量的履历文本信息,发现履历信息中多对设备或部件的名称进行缩写。基于专家知识和行业规范,构建缩略语词典,部分展示如表1所示。
表 1 缩略语词典Table 1 Abbreviation dictionary |
| 缩略语 | 规范用语 |
|---|---|
| 电机 | 直流电机 |
| 油液 | 液压油液 |
| 油泵/液压泵 | 液压油泵 |
| 油滤 | 液压油液过滤器 |
| 电位计 | 反馈电位计 |
| 零位 | 零位电压 |
2) 分词器分词,利用RBT自带的分词器对输入语句进行分词,工作机理与1.2节中嵌入层分词机理相同。
3) 缩略词识别与替换,对分词后的文本中每一个词语或字符进行遍历,当识别到缩略语时,便将依据缩略语词典对缩略语进行替换。最终即可得到信息完整、符合行业规范的文本样本。
1.4 设备维修等级自动分类模型
设备维修保养记录文本主要记录日常对EHS各零部件进行维修维护的信息,主要内容包括维修时间、操作人员、维修对象、维修手段、维修结果等。
针对设备健康评估这一目标,需要关注维修对象对于整个EHS性能表现的重要程度以及所进行的维修工作对于设备性能表现的恢复程度等。在工程实际当中,以上信息可通过维修等级这一标准整体反映。
根据维修部件的复杂程度、维修所需时间以及花费成本等特征,将EHS的维修等级分为小修、中修、大修。因此,针对设备维修保养记录文本的信息提取问题转化为如何利用记录的维修保养文本信息,对EHS开展的所有维修工作记录按照维修等级进行自动分类。
为解决这一问题,提出设备维修等级自动分类模型:
1) 模型训练准备,共收集EHS维修保养记录文本2 214条。将维修保养类型分为小修、中修、大修并分别赋予1、2、3作为分类标签值。2 214条文本中的1 550条作为训练集,664条为验证集。模型训练环境配置如表2所示。
表 2 模型训练环境配置Table 2 Model training environment configuration |
| 实验环境 | 配置 |
|---|---|
| 操作系统 | Windows 11 |
| CPU | Intel(R) Core(TM) Ultra |
| GPU | NVIDIA GeForce RTX 4060 |
| 内存 | 32 GB |
| 编程环境 | Python 3.7 |
| 深度学习框架 | Pytorch |
| 依赖库 | numpy, gensim, torch等 |
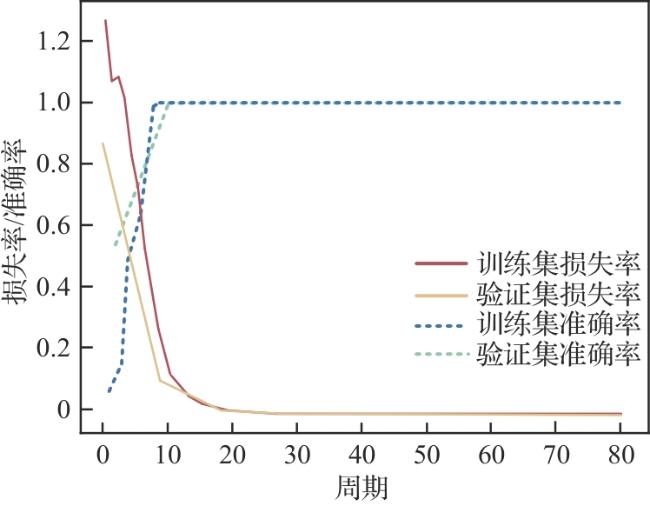
2) 下游微调策略设计,针对设备维修分类模型,在下游引入线性层完成文本分类微调任务。将BERT池化层的输出的token中[CLS]的隐藏状态输入线性层,输出维修等级标签值。利用线性层神经网络建立池化层输出的隐藏状态与维修等级标签值间线性层的映射关系,从而实现输入文本到维修等级的投影。线性层的输入维度由池化层输出决定,设置为768。输出维度由分类类别数决定,设置为3,偏置项设置为True。
分析维修等级分类模型输出结果可知,模型能够过滤维修日期,操作人员,操作过程等无关信息,根据维修对象复杂程度等信息对维修等级准确分类。
1.5 设备运行时间提取模型
设备运行记录文本,主要记录EHS的测试时间、工作时间、操作人员等信息。EHS的机械电子元件会随着通电时间的累积而产生不同程度的性能退化。例如:EHS直流电机在运行过程中,高速旋转的电机电刷与直流电机内壁会不断发生摩擦,在摩擦过程中电刷会产生碳粉碎屑并附着在电机内壁,进而导致电机绝缘性和散热能力下降。
因此,针对设备运行文本进行信息提取时,考虑过滤文本中大量的无关信息,准确提取出设备的运行时间。为解决这一问题,提出设备运行时间提取模型。
1) 模型训练准备,收集设备运行文本共计3 071条,其中2 149条作为训练集,922条为验证集数据。采用实体命名识别任务常用的“BI0”标注法为设备实体、运行时间实体以及无关文本赋予标签。其中“B”为英文单词“Begin”的首字母,用来表示一个实体频段的开始;“I”为英文单词“Inside”的首字母,表示一个实体片段的中间或结尾;“0”代表不属于任何实体片段的非实体词。文本标签值具体含义如表4所示。
表 4 文本标签值Table 4 Text label value |
| 标签 | 含义 |
|---|---|
| B-DEV | 设备实体开始词 |
| I-DEV | 设备实体中间词 |
| B-TIM | 运行时间实体开始词 |
| I-TIM | 运行时间实体中间词 |
| 0 | 非实体词 |
2) 下游微调策略设计,下游微调模型选用门控循环单元(Gated Recurrent Unit, GRU)网络和全连接层神经网络。与维修文本分类任务不同,运行文本提取模型将上游BERT模型池化层输出的最后一层隐藏状态全部输入至下游模型中。因此,首先引入GRU网络对隐藏状态进行进一步处理,捕捉输入序列内的时序依赖关系以增强特征。随后,全连接层负责将GRU网络输出的768维隐藏状态映射至5维的标签空间。GRU网络和全连接层的主要参数如表5所示。
表 5 GRU网络与全连接层主要参数Table 5 Main parameters of GRU network and fully connected layer |
| 参数 | GRU网络 | 全连接层 |
|---|---|---|
| 输入维度 | 768 | 768 |
| 输出维度 | 768 | 5 |
| 偏置项 | True | True |
| 层数 | 3 | 1 |
考虑到GRU网络和线性层包含的参数规模较大,在训练初期模型输出结果较差。如果在训练开始阶段便将下游模型和BERT模型一起训练,容易对预训练BERT模型的特征造成破坏,影响提取结果。因此,采取分阶段微调策略,在训练开始阶段,冻结BERT模型参数,仅仅训练下游模型,帮助模型快速适配下游任务的同时保留预训练BERT特征。在训练中后期,解冻BERT模型参数,上下游参数同步微调,保证模型整体更贴合任务特性。
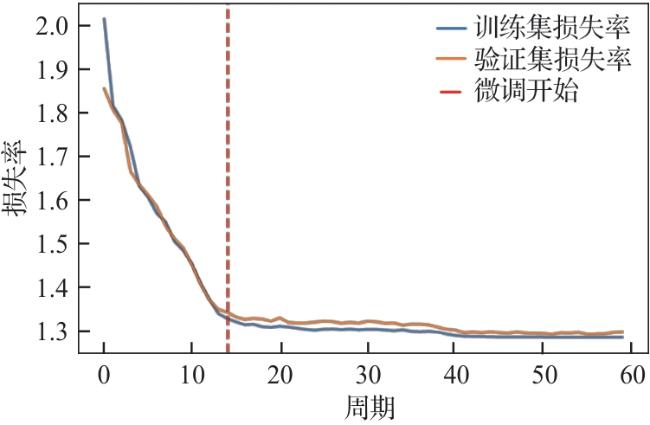
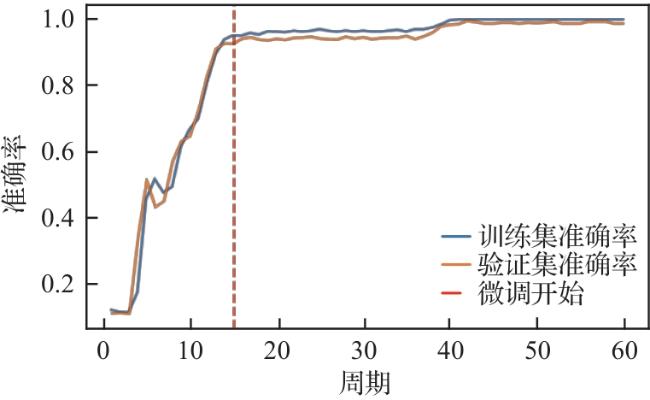
表 6 设备运行时间提取结果Table 6 Example of equipment runtime extraction result |
| 设备运行时间 | 提取结果 |
|---|---|
| 2022年3月21日,测试伺服机构伺服阀泄漏率,耗时3 h,操作人员XXX,XXX | 测试伺服阀泄漏率,3 h |
| 2022年11月8日,XXX对直流电机绝缘性进行测试,耗时20 min | 直流电机绝缘性测试,20 min |
| 2024年5月2日,伺服机构综合测试,耗时8 h,操作人员XXX | 伺服机构综合测试,8 h |
通过分析模型输出可知,模型能够过滤测试日期、测试人员等无关信息,同时能够准确提取出测试设备名称以及以数字或汉字表示的测试时间。
2 多源信息融合健康评估模型
解决融合履历文本中提取的信息与定量测试数据进而对EHS健康状态进行评估的问题。
2.1 基于ER-MIF的健康状态评估模型
基于证据推理规则,提出一种融合履历文本信息和测试数据的健康状态评估模型ER-MIF。
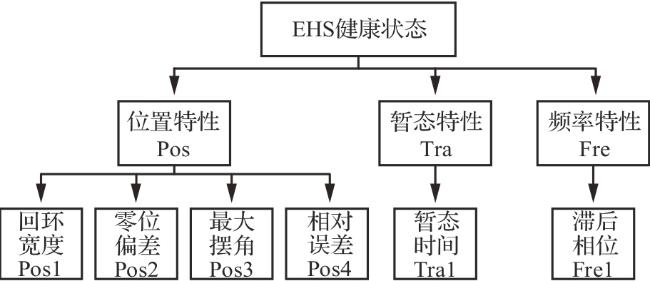
2.1.1 EHS指标体系构建
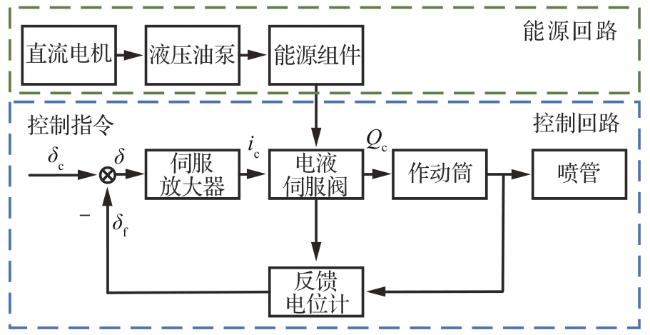
能源回路主要负责为EHS提供动力,EHS的能源组件包括液压油泵、增压油箱、油管等部件。在工作准备阶段,电机带动液压油泵进行初步建压,随后蓄能器气腔充气进一步增压,将液压油液泵入电液伺服阀中。
控制回路是EHS实现精准动作的核心。控制指令 经伺服放大器变换放大为电流信号 后输入至电液伺服阀力矩马达线圈中,控制驱动衔铁和弹簧管使伺服阀的阀芯产生位移形成输出窗口,形成正比于电流信号的液体流量 。液体进入作动筒,推动活塞,使其以正比于液体流量 的速度移动。在反馈通路上,作动筒发生位移带动反馈电位计的滑动接点,使反馈电位计输出正比于活塞位移的反馈信号 。反馈信号 与控制信号 反向,在伺服放大器进行综合,综合后的偏差量 ,于是控制电流和伺服阀流量都相应减小,活塞杆运动速度也相应减小,直到 ,从而实现对伺服机构的精准控制。
2.1.2 模型计算
1) 履历信息影响因子计算方法
履历信息影响因子定义为从履历文本信息中提取出的维修等级与运行时间对于EHS健康状态下降的影响程度。影响因子分为维修等级影响因子和运行时间影响因子。
维修等级影响因子计算方法,假设所有维修等级进行的维修内容仅对EHS原有零部件的维修维护工作,不包括换件维修;同时,各级别的维修均未超过其对应的最大维修次数。
根据维修等级与频率建立模型:
式中: 为sigmod函数; 为维修等级影响因子; 分别为大、中、小修的频率; 分别为大、中、小修的维修等效系数; 为维修系数。
考虑每次维修都会对EHS的健康状态造成衰减,并且不同等级的维修对于健康状态的衰减作用不同,各维修等级的衰减效果可通过实际数据统计分析结合专家经验得出,称为维修等效系数[32]。因此通过各等级维修频率乘以维修等效系数后累加的方式得到维修系数 。为适应模型输出结果,通过sigmod函数 将计算得到的维修系数 放缩至 区间内。
运行时间影响因子计算方法,假设EHS在运行记录文本中的运行时间内未发生使设备停机的严重故障或发生故障后经简单处理便恢复运行,且各运行时段工作环境基本相同。由于设备运行时间涉及到EHS各部件机械电子元件的性能退化以及环境因素等众多变量,因此综合考虑,建立运行时间影响因子标准化模型:
式中: 为运行时间影响因子; 为设备总运行时间; 为可调参数,用于调整整体变化趋势, , ;设备总运行时间 由1.5节中的设备运行时间提取模型提取出的测试时间和工作时间累加得到。
2) 输入信息转化
获取的健康指标监测信息的量纲和单位各不相同,首先要对各指标进行统一表达,即将指标信息转化为证据。假设底层健康指标为 。评估框架为 ,其中 表示健康指标第 个评估等级,对应的参考值为 ,且 。假设指标 在 时刻的测试值为 ,采用基于效用的转化方法[33],该指标对于不同等级的置信度计算为
式中: 分别代表评价为健康等级 的置信度,详细计算方法将在第3节实验验证中结合数值进行详细展示。测试值 可转化为证据置信分布形式:
式中: 为 在评估框架 下的证据。
按照上述方法可将EHS的6个底层健康指标转化为证据形式。
3) 证据权重计算
证据权重反映证据间的相对重要程度,即不同的健康指标在决策人心中的重要性,属于证据的外部属性[34],采用变异系数法计算证据权重。变异系数法能够有效捕捉健康指标的波动情况,进而反映对指标关注程度。假设健康指标 监测数据为 , 表示监测数据平均值, 表示监测数据方差,则有 证据权重 为
4) 证据可靠度计算
证据可靠度 反映了健康指标证据源准确获取健康信息的能力,属于证据的内部属性。采用基于距离的方法计算证据可靠度,详细计算过程见文献[35],不再赘述。
5) 证据融合
利用ER-rule进行证据融合前,需将式(5) 所示的证据概率分布形式转化为带有可靠性的加权置信分布(Weighted Belief Distribution with Reliability WBDR)[36]:
式中: 为指标 的WBDR; 为评价健康等级 的基本概率质量; 为幂集,由评估框架 所有子集构成; 为幂集 的基本概率质量。
基本概率质量, 计算式为
式中: 为混合权重因子,由权重 和可靠度 计算得到; 为证据 支持等级 的置信度。
基于ER-rule模型基础上,充分考虑履历提取信息与测试数据,提出ER-MIF模型。基于ER-MIF对 进行融合为
式中: 为 融合后支持等级 的置信度,反映了证据 对 的共同支持; 为证据融合后评估为等级 的基本概率质量; 为证据 分配给等级A的基本概率质量且 ; 为证据 分配给等级B的基本概率质量且 ; 为证据融合后评估为等级 的基本概率质量之和。
为不失一般性,对于L条证据,可根据式(13) 和式(14) 依次对证据进行组合。L条证据组合的结果为
式中: 为L条证据融合后支持等级 的置信度; 为L条证据融合后评估为等级 的未归一化的基本概率质量; 为L-1条证据融合后分配给等级 基本概率质量且 ; 为第L条证据 分配给等级B的基本概率质量且 ; 为证据融合后评估为等级 的基本概率质量之和。
根据效用理论,假设健康等级 的效用值为 , ,则EHS输出效用 为
输出效用将EHS健康等级概率分布转化为一个定量的数值,从而更加直观反映EHS的综合健康状态。
2.2 ER-MIF健康状态评估模型优化
评估等级参考值 、效用 以及维修等级影响因子中的维修等效系数 通常根据专家知识确定,具有主观不确定性。为提高EHS评估结果准确性,需对模型参数进行优化。
优化目标函数采用均方误差(Mean Square Error, MSE)建立:
式中: 为t时刻EHS的输出效用;u为期望的输出效用,通常由技术人员根据历史评估数据统计分析、评估场景和工程经验确定。
优化约束条件为
式中: 分别为评估等级参考值 的下界和上界; 分别为效用 的下界和上界。
3 实验验证
3.1 实验条件设置
基于工程实际与专家知识,EHS的健康评估框架设置为 ,健康等级 依次为健康、亚健康、失效。
3.2 EHS健康状态评估
基于电液伺服机构出厂说明与专家知识,确定EHS健康指标参考值与评估等级如表7所示。
表 7 参考值与评估等级Table 7 Reference values and assessment scale |
| 指标名称 | 健康 | 亚健康 | 失效 |
|---|---|---|---|
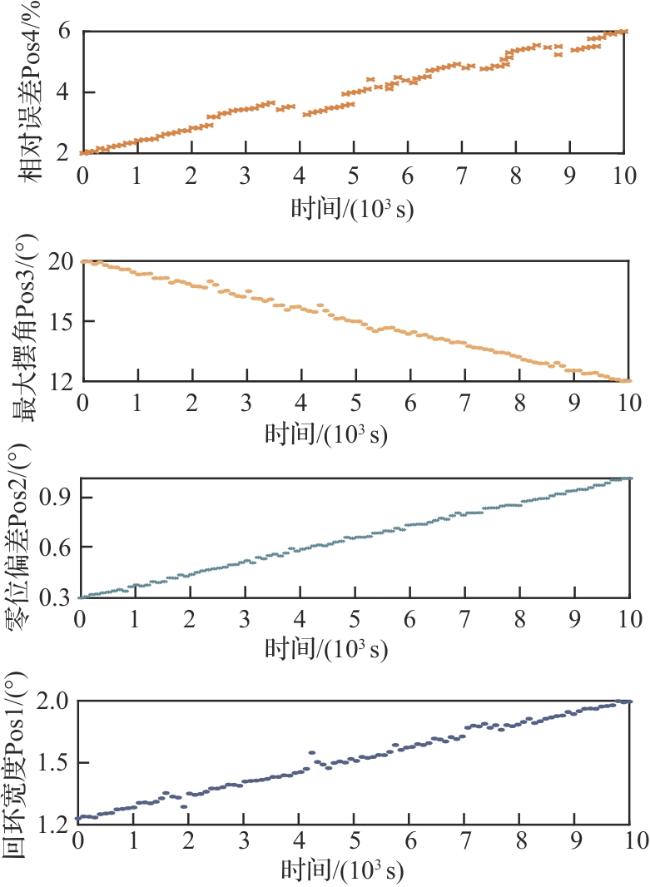
| 回环宽度Pos1/(°) | 1.24 | 1.5 | 2 |
| 零位偏差Pos2/(°) | 0.4 | 0.6 | 0.8 |
| 最大摆角Pos3/(°) | 18.5 | 17 | 16 |
| 相对误差Pos4/% | 2.8 | 4 | 6 |
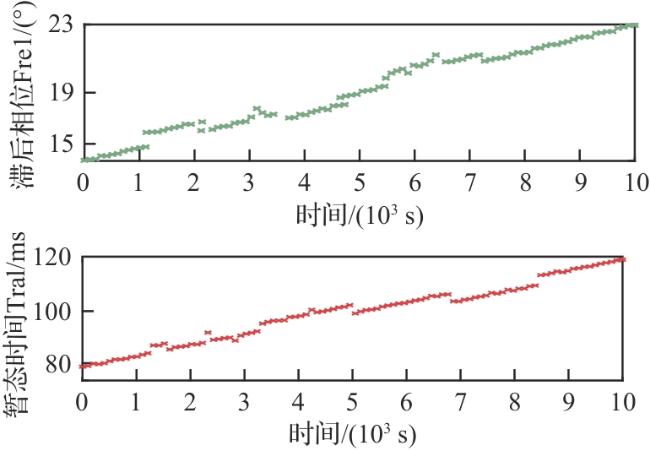
| 暂态时间Tra1/ms | 84 | 100 | 115 |
| 滞后相位Fre1/(°) | 17 | 19 | 21 |
根据式(4) 将各健康指标的监测数据转化为证据置信分布形式。以回环宽度Pos1为例:假设Pos1在某时刻的监测数据为 ,则:
Pos1在t时刻的证据置信分布为
类似的,可将各健康指标转化为证据置信分布形式。
选用的电液伺服机构已出厂18个月,维修保养记录文本25条,运行记录文本832条。利用1.4节提出的设备维修等级自动分类模型对25条维修保养记录文本进行文本自动分类,并对每种分类结果进行求和计数,得到在18个月内该电液伺服机构进行了18次小修,6次中修,1次大修。利用1.5节提出的设备运行时间提取模型对832条设备运行记录文本进行运行时间提取,将提取得到的运行时间进行求和,得到18个月内该设备总运行时间为38 h。根据出厂参数和专家经验,维修等效系数确定为: , , 。
给定运行时间影响因子可调参数初始值分别为 , 。将小修、中修、大修维修次数分别代入式(2) 中的 ,将总运行时间38 h代入式(3) 中的T,可得初始维修等级影响因子和初始运行时间影响因子分别为
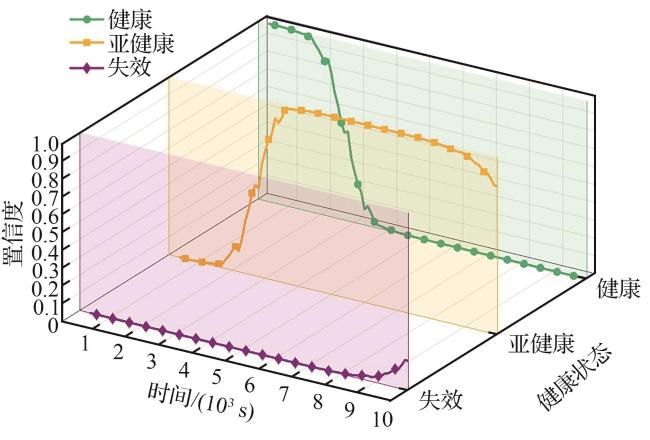
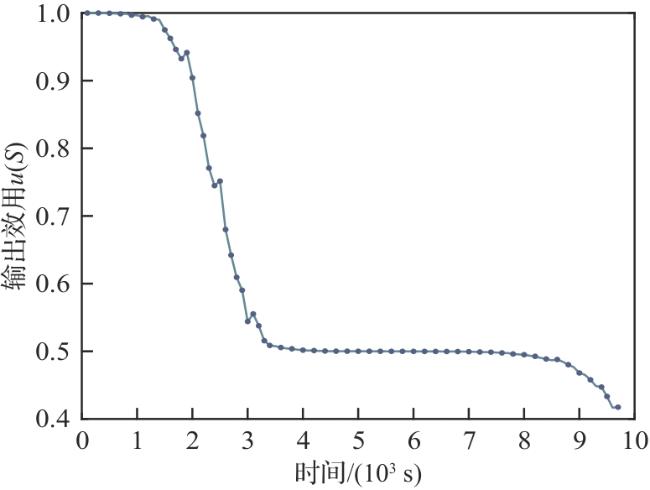
表 8 最优参考值Table 8 Optimal reference value |
| 指标名称 | 健康 | 亚健康 | 失效 |
|---|---|---|---|
| 回环宽度Pos1/(°) | 1.251 3 | 1.681 2 | 2.124 4 |
| 零位偏差Pos2/(°) | 0.380 1 | 0.770 6 | 0.933 3 |
| 最大摆角Pos3/(°) | 19.211 2 | 16.585 4 | 15.232 9 |
| 相对误差Pos4/% | 2.921 2 | 4.213 3 | 7.146 9 |
| 暂态时间Tra1/ms | 84.581 8 | 104.667 1 | 116.235 9 |
| 滞后相位Fre1/(°) | 18.123 2 | 20.124 4 | 22.088 2 |
表 9 模型其他参数最优值Table 9 Optimal values for other model parameters |
| 维修等效系数 | 可调参数 | 影响因子 | ||||
|---|---|---|---|---|---|---|
| 0.030 | 0.281 | 0.950 | 0.063 | 1.140 | 0.943 | 0.912 |
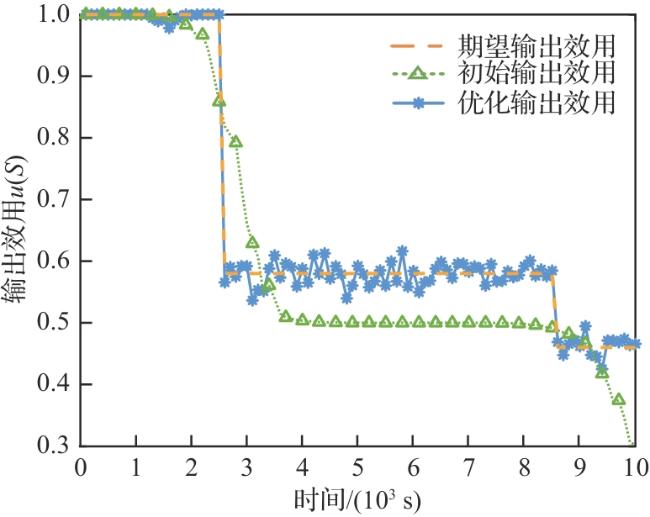
模型优化前后的输出结果如图11所示。可见,模型优化前后都基本能够反映EHS实际变化趋势,然而优化后的评估模型能够更加接近EHS期望输出效用。MSE是一种常用的评估模型输出值与真实值间偏差的指标。通过分别计算优化前后模型输出效用与期望输出效用的MSE来衡量模型优化前后输出精度。初始模型 ,优化后模型 ,优化后的模型精度提升约42.70%,可见优化效果较为明显。更加精确的输出效用意味着优化后的ER-MIF模型能够更为准确的反映设备的整体健康状态,便于管理人员更加科学的对设备进行健康管理。
3.3 对比实验
3.3.1 不同型号伺服机构评估结果对比
选用2种与3.1节不同型号的伺服机构进行健康状态评估。型号1为500 kN液氧液氢发动机的电液伺服机构,型号2为1 200 kN液氧煤油发动机的伺服机构,具体参数参见文献[39]。型号3为3.1节选用的伺服机构。型号1、2采用的数据为其在正常工况下工作的仿真数据,型号3的数据为实测数据。假设3种型号的履历信息完全相同,利用ER-MIF对3种型号进行健康评估,计算模型输出效用与期望效用间MSE的结果为:型号1 ,型号2 ,型号3 。可见,ER-MIF模型对型号1,2的评估精度与型号3相比相差较大。其原因主要为缺少型号1、2的履历信息,导致模型对评估结果的修正能力较差,从而导致评估精度与型号3相比出现了较大偏差。然而,模型即使在缺少实际履历信息情况下仍表现出了较高精度,验证了模型具有普遍的应用性。
3.3.2 与原始ER-rule模型对比
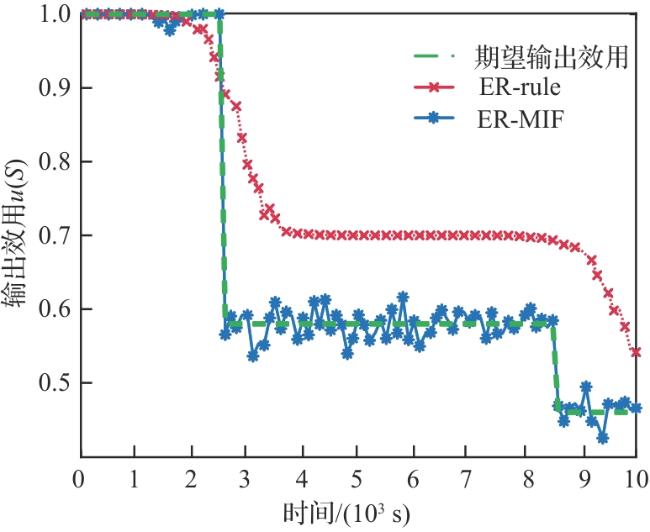
将未考虑履历文本信息的原始ER-rule模型和优化后的ER-MIF模型输出效用与期望输出效用进行对比,如图12所示。原始ER-rule模型输出效用与期望输出效用变化趋势基本相似。然而,由于原始ER-rule没有考虑维修等级和运行时间影响因子对于输出效用的折扣作用,因此ER-rule模型输出效用整体高于期望输出效用。
3.3.3 与其他健康评估方法对比
由于EHS健康指标监测数据较少,为避免模型过拟合并提升其泛化能力,在超参数设置上进行了针对性优化,因此对基于深度学习的方法和基于支持向量机的方法在超参数的设置上进行了适当调整。深度学习网络由一个堆叠的全连接层组成,其中隐藏层维度设置为32,最后接一个输出层以生成预测结果。支持向量机惩罚系数设置为0.1,收敛阈值为 ,选用线性核函数,类别权重设置为balanced。
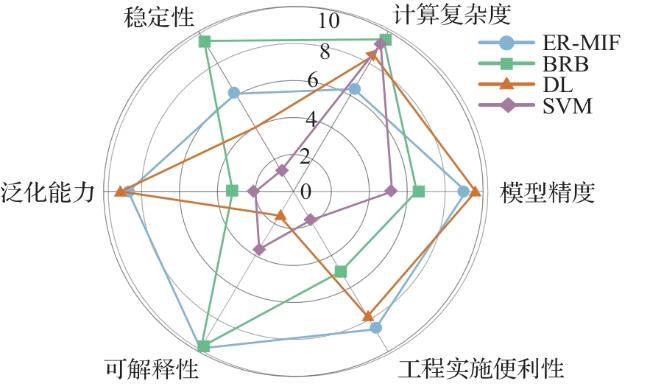
下面从模型精度、计算复杂度、稳定性、泛化能力,4个定量评价指标;可解释性、工程实施便利性,2个定性评价指标,将ER-MIF与其他方法进行对比。其中,模型精度衡量标准为模型输出效用与期望输出效用间的均方误差MSE,记为评价指标1。计算复杂度衡量标准为执行50次计算时间的平均值,记为评价指标2。稳定性衡量标准为执行50次计算,模型输出效用间的方差,记为评价指标3。泛化能力衡量标准为,对型号2电液伺服机构进行健康状态评估,模型输出效用与期望效用间的MSE,记为评价指标4。定量评价指标计算结果如表10所示。
表 10 定量评价指标计算结果Table 10 Calculation results of quantitative evaluation indicators |
| 模型评价指标 | ER-MIF | BRB | DL | SVM |
|---|---|---|---|---|
| 1 | 0.061 2 | 0.142 5 | 0.065 3 | 0.178 8 |
| 2 | 60 ms | 95 ms | 106 ms | 100 ms |
| 3 | 0.142 3 | 0.084 4 | 0.175 8 | 0.218 9 |
| 4 | 0.952 7 | 2.795 4 | 0.815 4 | 1.826 1 |
模型的可解释性通过领域专家进行打分获得,记为评价指标5。打分标准包括:输出结果的可回溯性,即模型的决策逻辑是否透明、可追溯;结果的可理解程度,即模型提供的解释是否易于专家理解并与自身知识验证。专家将基于在此框架下的分析,为模型的可解释性给出最终分数。
模型的工程实施便利性由领域专家从以下维度对模型进行打分获得:数据特征依赖程度,即对数据预处理与特征工程的依赖;领域知识依赖程度,即模型对业务知识的嵌入需求;模型更新成本,即适应变化的再训练成本;与模型维护成本,记为评价指标6。专家据此对模型实现与部署的便捷性给出综合分数。
综上,4种方法模型精度、计算复杂度、稳定性、泛化能力、可解释性、工程实施便利性打分结果如图13所示。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
可见,ER-MIF模型在模型精度、可解释性上以及模型泛化能力表现较为良好,然而由于维护等级和运行时间影响因子受履历信息提取效果影响较大,因此在稳定性上相对短缺。同时,由于ER-MIF能够利用半定量信息的特性,对数据特征和领域知识依赖程度都相对较低,在工程实施便利性上有较大优势。而深度学习虽在模型精度、泛化能力、工程实施便利性等多个方面与ER-MIF表现接近,但是其可解释性远低于ER-MIF,结果的可靠度可信度难以确定。因此在对EHS的维护进行可靠决策时应优先选用可解释性好的ER-MIF模型。剩余2种方法在模型精度上明显低于ER-MIF,因此不作讨论。
4 结 论
1) 提出了一种基于BERT大规模自然语言处理的履历文本提取模型,实现了将履历文本中包含的设备维护等级、次数以及设备运行时间等蕴含设备健康情况信息的有效提取。训练结果表明:提出的设备维修等级自动分类模型在经过15个周期训练后,分类结果准确率为100%,损失率为0%;提出的设备运行时间提取模型,在经过60个周期的训练后,准确率基本稳定在97.88%,损失率稳定在1.35%,性能表现均较为良好。
2) 提出了维修等级与运行时间影响因子,与健康指标测试数据共同作为模型输入参数,构建EHS健康状态评估模型。实现履历文本信息与健康指标测试信息的多源信息融合。
3) 建立参数优化模型,提高模型健康评估精度,解决部分模型参数确定过于主观的问题。基于某型伺服机构测试数据实验结果表明,优化后的ER-MIF模型输出效用的MSE为0.061 2,较优化前模型精度提升了42.70%。
4) 通过与基于置信规则库、深度学习、支持向量机的健康状态评估方法进行对比实验,证明了所提ER-MIF模型在模型精度、计算复杂度、可解释性和稳定性等方面有较为均衡的表现,整体性能表现上优于其他3种方法。
然而,ER-MIF模型没有考虑环境因素如噪声、振动等因素的干扰,也没有考虑人员误操作对模型结果的影响。这些方面将在后续的研究中进一步探讨。