
作为旋翼类飞行器,由旋转部件产生的振动问题是高速直升机的固有问题。旋翼引起的低频振动为直升机最主要的振动源,低频振动载荷汇聚在桨毂处,再通过发动机、减速器等部件传递到机身,最终形成固定频率的大幅度正弦振动力[1-4]。过度振动会缩短机体部件寿命、制约机载武器系统效能、影响舒适性,严重时危及人员安全,且座舱部位的振动力幅值会随着直升机前飞速度的提升而增大[5]。因此,抑制直升机振动水平是提升直升机工作性能的关键,也是研制高速直升机必须要突破的技术难点。其中基于反共振原理的结构响应主动控制(Active Control of Structural Response, ACSR)和桨毂顶置主动式作动系统(Hub-mounted Active Actuation System, HAAS)得到更为广泛地关注和应用。
如表1所示,ACSR具有安装简单、适航性强的优势,但需要在机身多部位布置多组作动器,导致减振成本上升且带来重量负担。相较于ACSR,HAAS从振源处抑制振动载荷向机身传递,只需在直升机桨毂处安装一组作动器,减轻重量的同时可以进一步提升减振效率。其工作原理为使用电力式作动器输出与直升机桨毂处振动力相位相反的作动力从而实现振动载荷抵消,以实现直升机振源处的减振。但HAAS中的桨毂顶置主动式作动器工作在旋转且振动载荷更加复杂的环境中,其控制难度增加,并且作动器的功率与控制指令均需要通过集流环进行传输,保证减振系统稳定可靠运行是HAAS的研制难点。
表1 ACSR与HAAS抑振技术对比Table 1 Comparison of ACSR and HAAS vibration suppression techniques |
| 技术类型 | ACSR | HAAS |
|---|---|---|
| 抑振原理 | 机身多节点反共振力抵消 | 桨毂处直接抵消振动源载荷 |
| 安装位置 | 机身多处 | 桨毂单点 |
| 作动器数量 | 多组 | 单组 |
| 重量负担 | 高 | 低 |
| 减振效率 | 较低 | 高 |
针对桨毂顶置主动控制技术,国外进行了大量的研究工作,已实现工程化应用。2007年,Sikorsky公司率先将单频HAAS应用于直升机旋翼系统,通过地面试验验证其对3Ω/4Ω振动载荷的抑制效果[6],2011年联合Lord公司开发双频HAAS,采用3Ω与5Ω双频协同控制,使振动水平降低70%以上[7]。2014年通过结构优化将除冰系统集成至桨毂顶置主动式作动器,并在黑鹰直升机飞行试验中实现机身4Ω振动显著降低,系统减重54 kg且可靠性优异[8]。2018年Lord公司Jolly团队提出偏置轮毂设计,通过质量块相位差抵消掉电振动,突破安全性瓶颈[9]。国内研究则起步较晚,2016年,张鹏[10]搭建了桨毂顶置主动式作动器性能验证试验平台,通过电力作动器样机测试验证了基础设计可行性;2017年,陈新华等[11]将时域振动主动控制算法应用于HAAS,并设计了HAAS的地面试验台;2020年,宋奎辉[12]使用电力作动器样机搭建了HAAS,分别在固定系和旋转系下验证了系统控制有效性;2023年,王昶天[13]在现有电力作动器结构中加入了轴偏置设计,通过试验验证了其自动质量平衡功能。
当前,国际领先企业(如Lord公司)已实现桨毂顶置主动式作动器装机应用,其工程方案具备掉电5 s内自平衡能力及70%减振效率,但未公开输出力动态响应等关键指标;国内研究聚焦安全性设计,仍处于原理样机阶段。在结构设计上提出轴偏置集成构型,掉电自平衡输出力幅值≤0.11,与国内外水平相当。
控制策略方面,现有方案存在动态响应与电源特性矛盾,交叉耦合控制同步性优但响应慢;在结构响应主动控制中,南京航空航天大学郝振洋教授团队在交叉耦合控制的基础上提出并行独立控制策略,在提高动态响应速度的同时进一步降低直流母线侧电流至8.5 A、降低电压冲击至32.4 V,动态响应时间<1[14]。在独立并行控制的基础上提出位置轨迹最优控制策略,通过双电机轨迹协同优化,电流冲击进一步降至8.3 A,电压无明显冲击,动态响应时间≤0.94。
核心工作在于:① 面向工程化的作动系统设计,完成装机前地面指标验证;② 提出位置轨迹最优控制策略,通过双电机轨迹协同优化,提高输出力动态性能的同时进一步降低直流母线侧电压、电流冲击,提高系统稳定性。
1 控制系统
1.1 桨毂顶置主动式作动系统
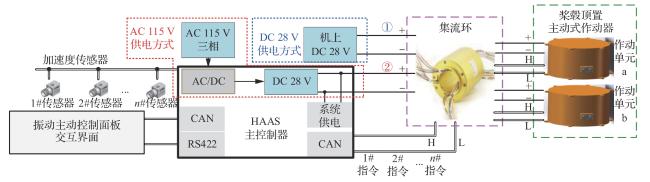
HAAS布局如图1所示,其核心组件包含加速度传感器、主控制器及桨毂顶置主动式作动器。加速度传感器固定于直升机固定系,实时监测桨毂区域振动载荷并传输至主控制器;主控制器集成于驾驶舱控制面板,具备驾驶员交互界面,可根据加速度信号解算生成减振作动力指令;桨毂顶置主动式作动器通过旋翼主轴集流环接收控制指令后,驱动内置电机输出动态反相位作动力,实现振动主动控制。其中,在直升机旋翼主轴处安装集流环用于信号和功率在固定系与旋转系间的传输。

HAAS信号与功率流动情况如图2所示。桨毂顶置主动式作动器供电可采用机上115 V三相交流电经主控制器整流为28 V直流电,但系统动态响应过程可能导致直流电压冲击影响主控制器正常工作。相比之下,直接使用机上28 V直流电更为稳定,此时桨毂顶置主动式作动器与其他机载设备共用28 V直流电,桨毂顶置主动式作动器工作时的母线电压电流冲击,会影响其他机载设备的安全运行。因此为了保证直升机与HAAS安全可靠运行,需进一步提升系统动态响应快速性的同时降低直流母线侧电压电流冲击,提升作动单元的电源特性。
1.2 作动单元输出力建模
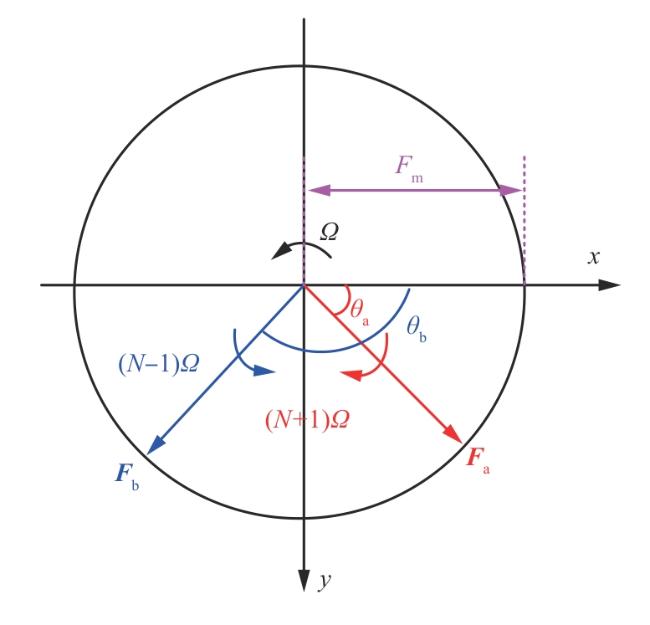
因此,桨毂顶置主动式作动器需要产生与旋翼旋转反向的作动力 和同向旋转的作动力 ,保证输出力频率、幅值和相位可控。
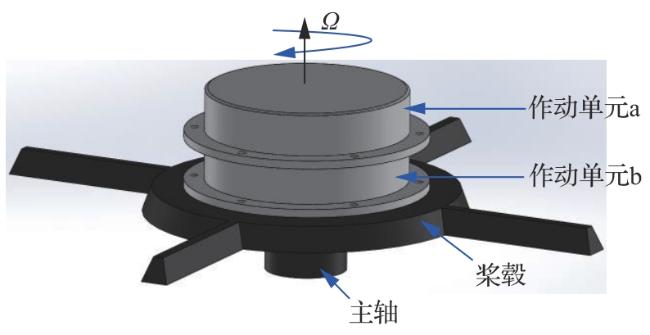
为满足上述输出力要求,桨毂顶置主动式作动器结构如图5所示,采用双作动单元结构:作动单元a以(N+1)Ω频率反向旋转,作动单元b以(N-1)Ω频率同向旋转。每个单元均包含偏心质量块及伺服驱动系统,两者除旋转方向与频率参数差异外,控制方法具有一致性,故可选取单个作动单元进行研究。
作动单元通过双偏心质量块生成可控频率、相位及幅值的作动力,如图6所示。质量块质量均为m,旋转半径r,在旋转坐标系下角速度为ω 1、ω 2。
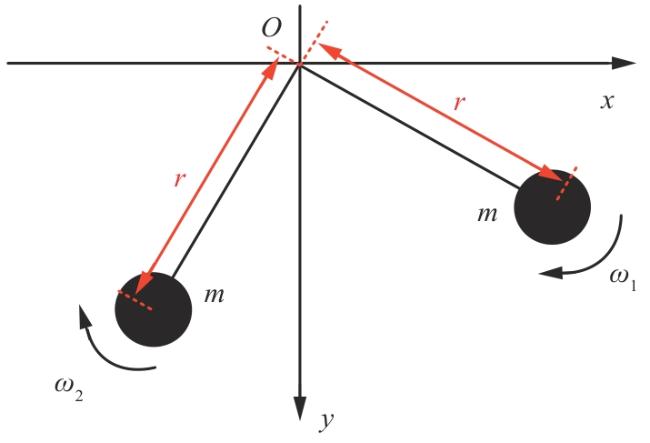
旋转系中的两质量块输出力建模及合成如图7所示,0刻度由红色虚线标示,t时刻两质量块绝对位置θ 1=ω 1 t+φ 1,θ 2=ω 2 t+φ 2,其中,φ 1、φ 2为质量块1、2的初始绝对位置,此时,质量块1输出力 ,输出力相位为θ 1,质量块2输出力 ,输出力相位为θ 2。
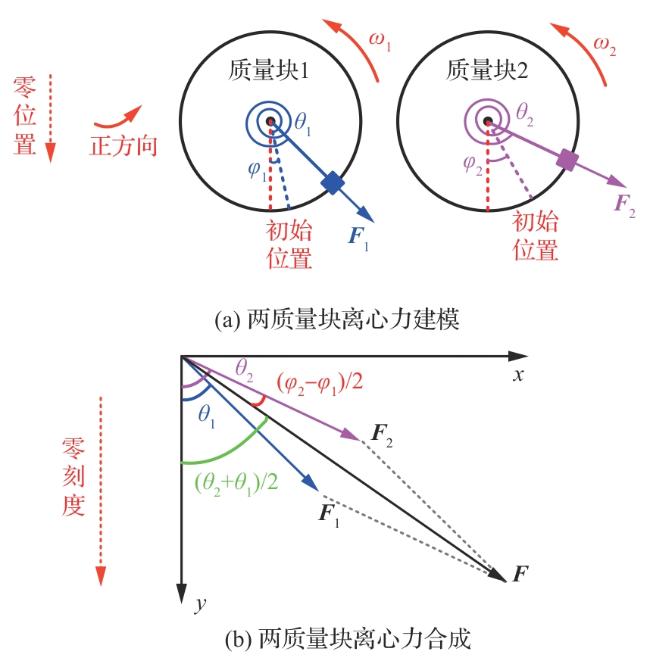
当两电机完全同步,即ω 1=ω 2=ω,矢量合成后如图7(b)所示,为方便表示,将θ 1、θ 2归算至(-π,π],得到合成力:
由式(1) 可知,在作动单元结构及工作频率固定时,通过控制两质量块的相位差来控制输出力幅,当θ 1-θ 2=0时,输出力幅值最大为2mrω 2,当θ 1-θ 2=π时,输出力幅值最小为0;通过控制两质量块在某时刻的相位均值可以实现对这一时刻输出力相位的控制;通过控制质量块转速可以控制输出力频率。对作动单元提出了如表2所示的技术指标。
表2 作动单元输出力性能指标Table 2 Output force performance metrics of actuation unit |
| 描述 | 参数(标幺化处理) |
|---|---|
| 工作频率 | 额定为5,4和6下均能稳定工作 |
| 频率误差 | ≤0.2% |
| 最大输出力幅值 | ≥10 |
| 最小力指令输出力幅值 | ≤0.5 |
| 相位稳态误差 | ≤1.8° |
| 动态响应时间 | ≤1 |
| 掉电自平衡时输出力幅 | ≤0.5 |
设系统所需输出力表达式为
式中: 为所需输出力力幅;ω *为所需输出力频率对应的角速度;φ *为所需输出力相位。
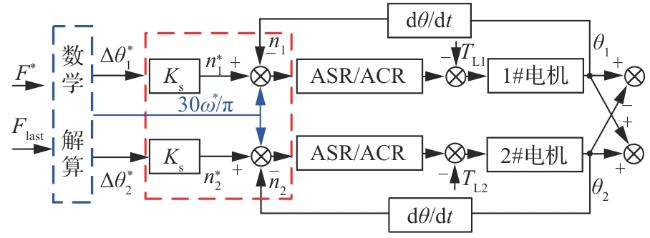
设两电机转子位置θ 1、θ 2的给定值为θ 1 *、θ 2 *,电机角速度给定值与所需输出力给定角速度相等为ω *。解算得到:
结合式(3) 可知,通过控制双电机的转速可以控制输出力频率,通过控制双电机转子上质量块的相位差可以控制输出力幅值,通过控制双电机转子上质量块的相位均值可以控制输出力相位。
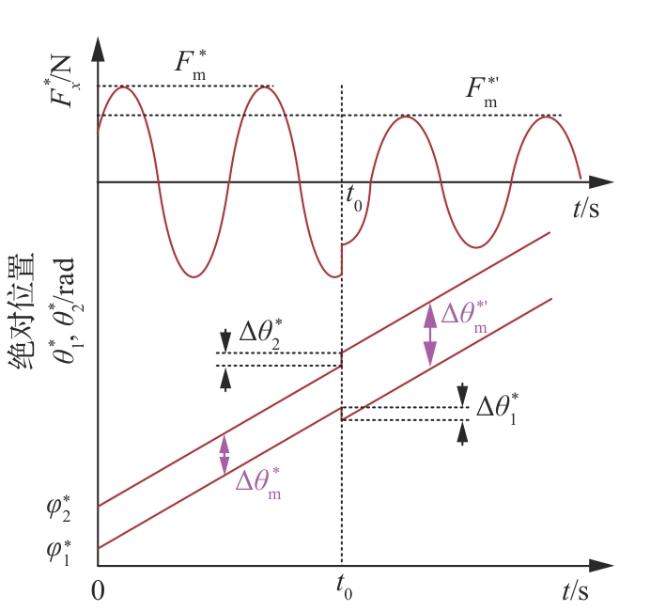
若在t 0时刻,要求输出力幅值给定由F 变为F ´,则双电机相位差由2arccos(F /2mω *2 r)变化为2arccos(F ´/2mω *2 r)。1、2号电机的位置给定变化量为
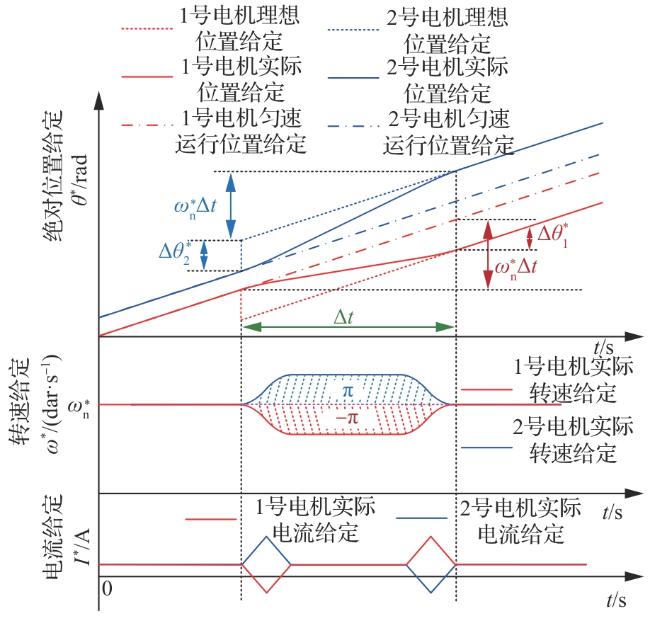
在理想情况下,变力幅动态响应过程电机位置给定变化如图8所示,其中, 、 为力幅变化前后对应的双电机相位差; 、 为1、2号电机给定的初始绝对位置。双电机位置变化完全相反,只改变双电机相位差,不改变双电机相位和,不影响输出力相位控制。
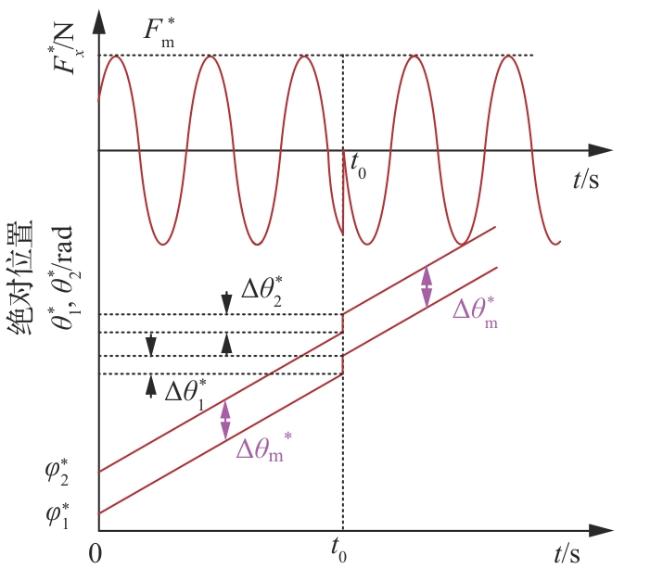
若在t 0时刻,要求输出力相位由当前t 0时刻相位φ *变化至φ *´,则双电机位置给定变化量为
图9以相位由当前时刻变化至π/2 rad为例,绘制出变相位对应的电机位置给定变化。双电机的位置变化量完全相同,变相位前后,双电机相位差始终保持不变,即输出力幅值不变。
此时,单个作动单元实现了旋转系下的输出力频率、幅值、相位三要素控制,满足桨毂的减振力需求,且输出力控制问题被转化为电机控制问题。以上输出力建模与控制的前提是假设两电机完全同步,因此保证输出力控制性能的要素主要有两点,一是保证单电机的转子位置、转速精准跟随,二是保证多电机运行的同步性。
1.3 作动单元构型设计
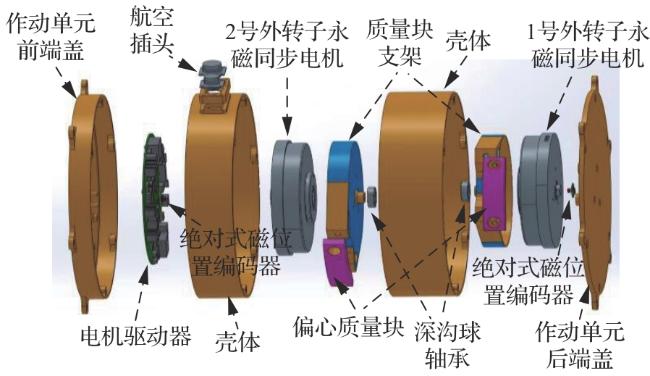
根据作动单元输出力控制需求及其工作环境,进行作动单元构型设计,爆炸图如图10所示,包括两台外转子电机及其磁编码器、两组质量块及其支架、轴承、航插、壳体以及前后端盖。
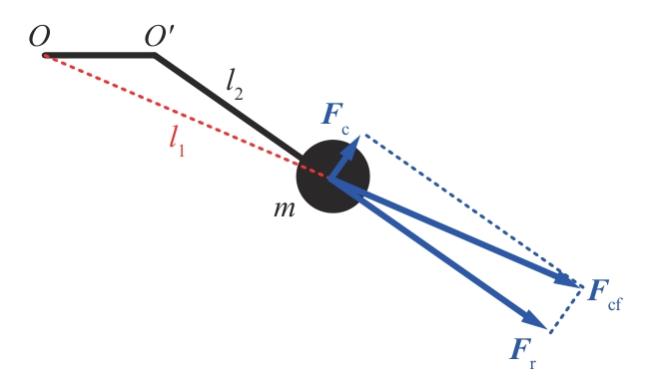
自平衡过程中单个质量块的受力分析如图12所示,其中O是作动单元中心,即旋翼主轴中心;O´是质量块的旋转中心,当质量块跟随旋翼旋转时,产生的离心力为F cf,幅值为ml 1 ω 2。F r为离心力沿轴承径向的分量,F c为离心力沿轴承切向的分量。自动质量平衡原理是F c作为动力使得外转子及质量块克服轴承摩擦力旋转至平衡位置。
深沟球轴承的摩擦系数及摩擦阻力矩公式[17]为
式中:P为球轴承的当量动载荷;η、g及t分别为保持架滚珠间滑动摩擦、保持架外圈(或内圈)之间滑动摩擦以及滚珠离心力对球轴承摩擦系数的影响程度;z为轴承滚珠数;E为材料弹性模量;f为滚珠对内圈的滑动摩擦系数;D为轴承外径;D in为轴承内径。系统选用轴承型号为6902,相关参数如表3所示。
表3 作动单元轴承相关参数Table 3 Bearing-related parameters of actuation unit |
| 序号 | 参数 | 数值 |
|---|---|---|
| 1 | f | 0.001 5 |
| 2 | η | 1.5 |
| 3 | g | 1.5 |
| 4 | t | 1.2 |
| 5 | E/( N∙m-2) | 200×109 |
| 6 | D/m | 0.028 |
| 7 | D in/m | 0.015 |
| 8 | z | 10 |
| 9 | P | F r |
表3中参数代入式(6) ,计算得到摩擦阻力矩M pin为6.916×10-9 F r 5/2。质量块旋转半径l 2= 101.7 mm,偏心距为4 mm,可以近似l 1≈l 2= 101.7 mm。质量块跟随主轴旋转产生的离心力的幅值F cf为37.66 N,离心力的切向分量的幅值F c约为1.48 N。摩擦阻力的幅值F m为0.592×10-3 N。此时,离心力切向分量的幅值F c远大于摩擦阻力的幅值F m,质量块具备实现自平衡的条件。
作动单元正常工作时,离心力切向分量 F c将转化为系统阻力,对于电机控制而言,等效为电机的负载转矩增加,其大小为0.151 N·m。因此,在无刷直流(Brushless Direct Current, BLDC)电机选型时,除满足系统正常运行所需要的指标要求外,还需增加电机的电磁转矩输出能力。
1.4 位置轨迹最优控制策略
消振电力作动器的多电机控制常使用交叉耦合控制或并行独立控制策略。交叉耦合控制策略直接将系统双电机的相位差和相位均值进行闭环控制,由于存在双电机的同步性闭环,系统同步性好,适用于双电机机械参数不一致的工况,但这使得双电机控制相互耦合,内环动态响应频繁从而增加转速波动和母线电流波动。并行独立控制策略解决了交叉耦合控制策略中的多电机控制耦合问题,对单电机的控制性能要求更高。为了兼顾动态响应的快速性以及减振效率,位置环采用给定前馈+比例-积分-微分(Proportional-Integral-Derivative, PID)的复合控制方法,但也引出了系统控制复杂,参数设计难度大等问题[14]。
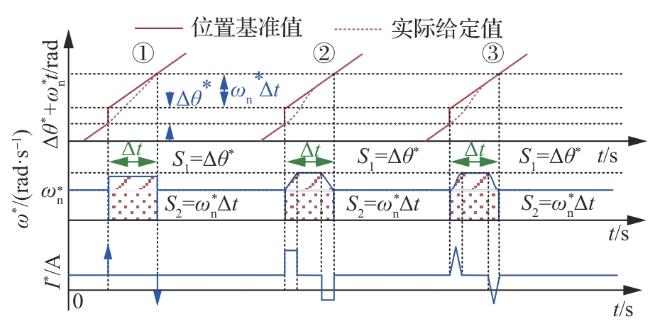
位置轨迹最优控制策略的控制原理为根据当前所需输出力要求,计算出电机的位置变化量,并规划电机转速给定曲线,保证电机转速变化量关于时间的积分等于这一位置变化量。由式(3) 可知电机外转子位置控制与所需输出力的解算关系,对于位置轨迹最优控制而言,位置变化量与当前时刻的输出力有关。
记当前时刻的输出力为F last,对应的输出力幅值、相位分别为F last、φ last,当前时刻的给定力为F *,对应的频率、幅值、相位分别为ω *、F m *、φ *。当作动单元接收到新的输出指令时,输出力频率指令ω *直接折算为电机转速送至转速环,计算出双电机的位置变化量为
此时,位置变化量为阶跃量。根据这一阶跃量进行电机转速变化路径规划,保证电机转速变化量关于时间的积分等于这一阶跃量,最终实现输出力控制。
在位置轨迹最优策略下,将控制输出力的基准转速直接给定至转速环,将传统伺服控制中的位置闭环转化为开环阶跃信号,既消除了传统位置闭环控制中因环路调节导致的动态跟踪延迟,又规避了双电机协同控制中的耦合难题,提升了系统稳定性。
此时,作动单元的输出力精度完全依赖于单电机的转速跟随情况,精度控制难度加大,对电机的转速跟随性能提出了挑战。因此,单电机转速环、电流环应具备良好的动态响应快速性和准确性,同时,为了便于电机进行伺服跟随,还应对单电机的转速给定路径进行优化,尽量降低电机的伺服跟随难度。
2 控制系统质量块运动轨迹规划及参数设计
2.1 单电机控制框图及参数设计
对于位置轨迹最优控制策略,为了保证输出力控制精度,要求电机控制内环具备优异的跟随性能。最终构建了如图14所示的单电机控制架构。其中包含位置开环给定、转速环、电动电流环以及为了抑制正弦脉动负载而引入的制动电流环。
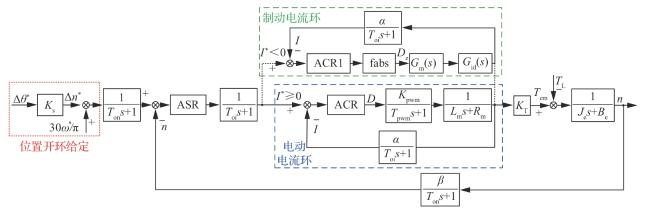
表4 电动、制动电流环参数Table 4 Drive/brake mode current loop parameters |
| 环路 | 比例系数 | 积分系数 | 截止频率/ (rad·s-1) |
|---|---|---|---|
| 电动电流环 | 2.2 | 1 866.678 | 6 070 |
| 制动电流环 | 0.143 | 42.857 | 6 370 |
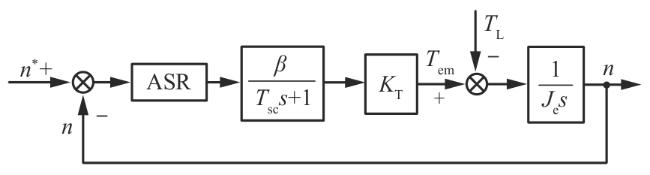
此时,转速环开环传递函数为
根据系统频域指标要求,对转速环PI参数进行设计,转速环的截止频率ω sc和相角裕度φ s满足:
相角裕度要求在40°以上,以保证系统稳定性。转速环的截止频率ω sc要大于3~5倍的工作频率(这里取4倍),小于电流环截止频率ω cc/5。即648.42 rad/s<ω sc<1 214 rad/s。将系统中的数值代入式(9) ,得到:
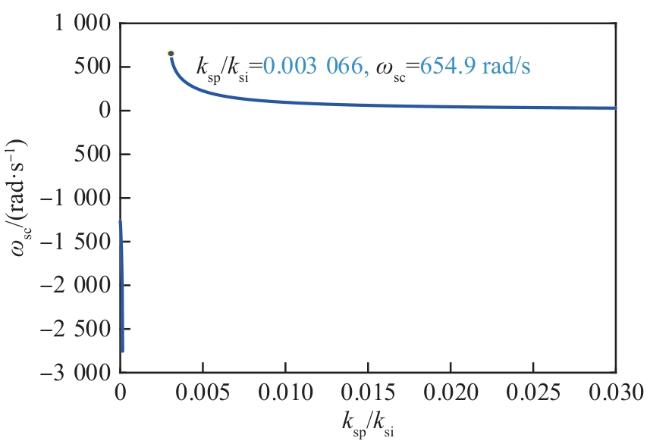
取相角裕度为40°,以10-6为步长,绘制转速环比例系数与积分系数比值(k sp/k si)取值下的转速环截止频率ω sc [21]如图16所示。根据稳定性分析,当k sp/k si<6.647 4×10-4时,系统因相位裕量φ s负值而失稳;当k sp/k si处于(6.647 4×10-4, 0.003 066)区间时,系统在40°相位裕度约束下无可行解。当k sp/k si=0.003 066时,系统可获得最大截止频率ω sc=654.9 rad/s,满足648.42 rad/s<ω sc<1 214 rad/s的频带要求,同时保持40°相位裕度。计算得校正的比例系数k sp=39.56、积分系数k si=12 904.3。
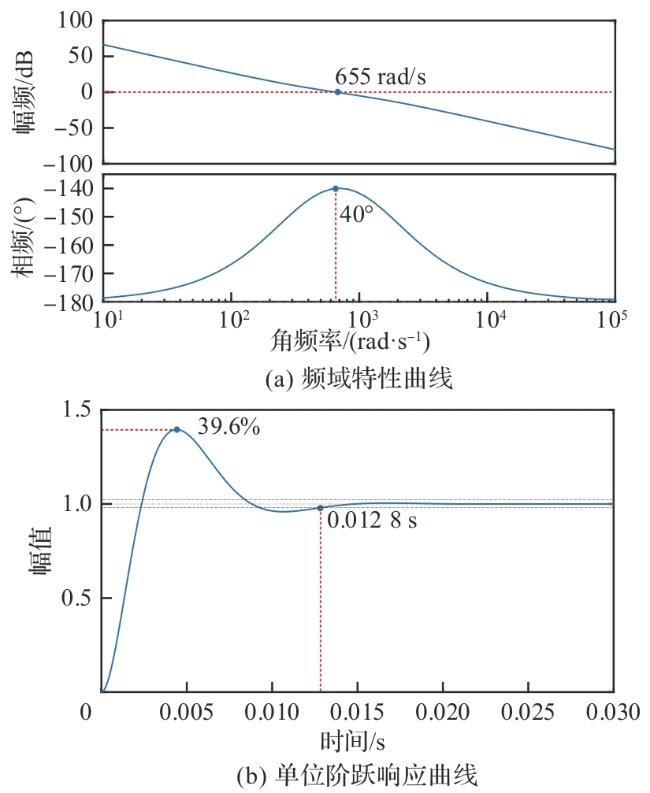
如图17所示,校正后系统转速环截止频率为655 rad/s,相位裕度40°,阶跃响应调节时间12.8 ms,超调量39.6%。为抑制实际运行中的动态超调,系统采用转速给定缓变策略进行轨迹规划,在保证快速响应的同时有效改善动态响应的超调。
2.2 质量块位置轨迹给定路径规划
通过Matlab/Simulink建立的BLDC电机转速环、电流环双环控制模型验证上述结论。当转速给定信号为阶跃、三角、梯形波时,转速规划路径均存在斜率突变点,导致电流内环给定出现冲击的同时,在斜率突变点处电机转速跟随还存在不同程度的超调量。而采用二次函数优化路径的转速给定缓升缓降如图19所示。
将转速给定的上升下降路径优化为二次函数,转速曲线不存在斜率突变点,电机转速跟随无超调。加速、减速阶段会引入小幅度的稳态误差,通过对称路径设计可保证动态过程结束后误差完全收敛至0。
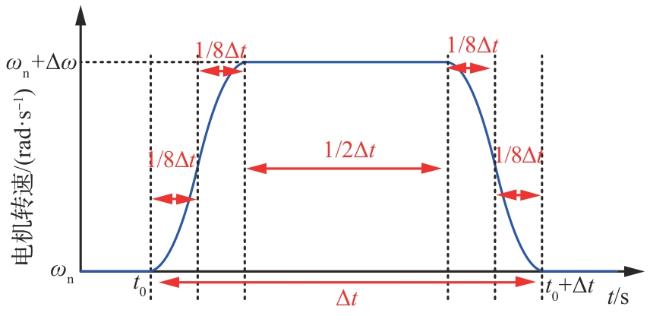
设缓变部分转速路径表达式为ω *(t)=at 2+bt+c,推导出完整动态响应过程的转速路径表达式为
2.3 系统位置轨迹优化
系统的动态响应带宽越高,系统与直流母线侧的能量交换越多。在变力幅动态响应过程中,如图8所示,双电机位置变化呈现反向对称特性。减速电机的回馈电能可直接供给加速电机使用,实现系统内部能量循环,显著降低与直流母线的能量交换量。
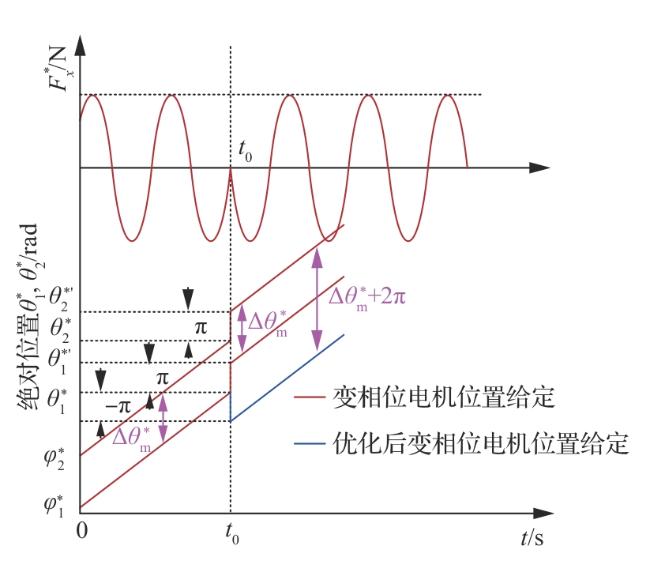
而对变相位动态响应而言,理论分析表明当相位突变π rad时系统能量需求达到极值。如图9所示,此时传统控制下双电机处于同向的电动、制动状态,导致直流侧承受叠加的功率冲击。通过引入系统位置轨迹优化算法,将绝对位置给定重构为等效相位差补偿模式,使双电机运行状态形成互补。
如在t 0时刻,输出力幅值不变,输出力相位由-π/2 rad变为π/2 rad。此时,双电机相位变化量均为π rad,电机位置给定如图21中红色实线所示。对于单质量块而言,其输出力F=mω 2 rej θ =mω 2 rej( θ +2 k π),其中,k为任意整数。因此,双电机变相位的位置给定θ 可以等效为θ +2k 1π=θ +π rad+2k 1π,θ 可以等效为θ +2k 2π=θ +π rad+2k 2π,其中,k 1、k 2为任意整数。当k 1=-1,k 2=0时,θ = θ -π rad,θ =θ +π rad,此时对应的电机绝对位置变化如图21中蓝色实线所示。在进行动态响应给定优化后,1号电机在t 0时刻的位置变化量为-π rad,2号电机位置变化量为π rad,双电机相位差由Δθ 变化为Δθ +2π rad,最终的输出力幅值保持不变。
位置轨迹优化策略使双电机在动态响应过程中分别处于电动与反馈制动状态,双电机轨迹优化后的环路给定如图22所示,可以在提升系统动态响应快速性的同时,降低直流母线侧电压电流冲击。
3 试验验证
3.1 试验平台搭建
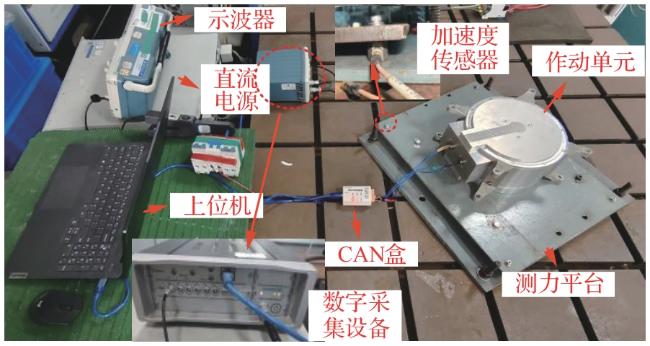
作动单元输出力性能测试平台如图23所示。主要包含了一台作动单元、测力平台、加速度传感器及其数字采集设备、CAN通讯盒及上位机。上位机将输出力指令通过CAN总线发送至作动单元;作动单元固定在测力平台上,接收到指令后通过电机驱动质量块输出作动力;安装在作动单元底部的加速度传感器采集加速度信息,通过数字采集设备送至上位机;测力天平将作动单元输出的力幅转换为电信号,经由数据采集系统(Intelligent Data Acquisition System, iDAS)上传到上位机,并在MATLAB中绘制输出力波形并滤除干扰信号与无关噪声。
为精准提取作动单元输出力特征并抑制环境干扰,采用基于有限长单位冲激响应(Finite Impulse Response, FIR)的零相位带通滤波技术。针对目标工作频率f c,设计400阶FIR带通滤波器,通带范围设定为[f c-1.5, f c+1.5] Hz,通过双向滤波函数消除相位偏移,确保时域波形保真。
3.2 作动单元工作性能验证
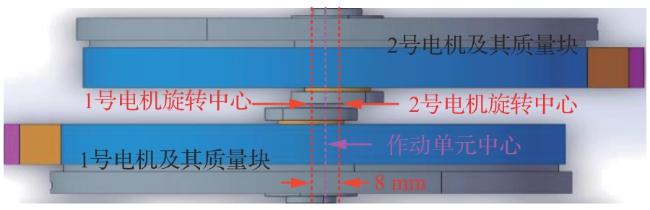
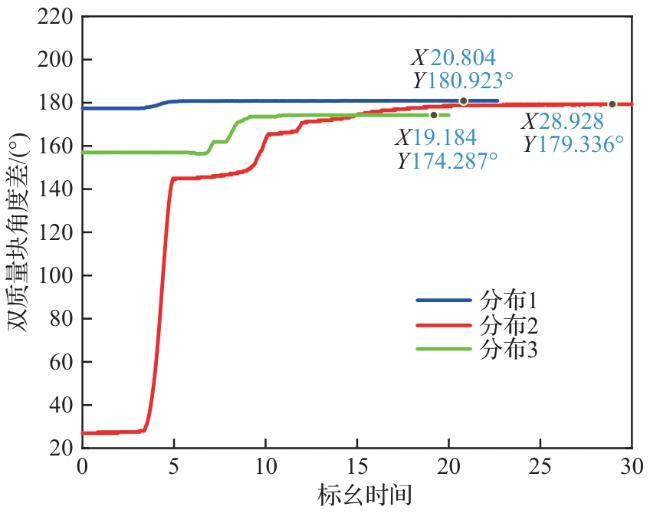
为验证其自动质量平衡功能有效性,搭建直升机旋翼动力学相似试验平台,电机驱动旋翼主轴实现额定转速Ω工况,通过磁编码器监测作动单元断电状态下双质量块的相对位置,得到如图24所示的试验数据。数据表明,在旋翼由静止加速至额定转速过程中,3种初始随机分布的质量块相位差均能稳定收敛,分别收敛至180.9°、179.3°、174.3°,验证了轴偏置结构可实现质量块自主平衡。当偏离额定转速,相位差偏差呈增大趋势,但最大误差工况下的输出力幅值为0.11,低于通电状态零指令输出水平。
为验证作动单元动稳态性能,根据技术指标要求,开展相关试验。
1) 最大力稳态性能试验
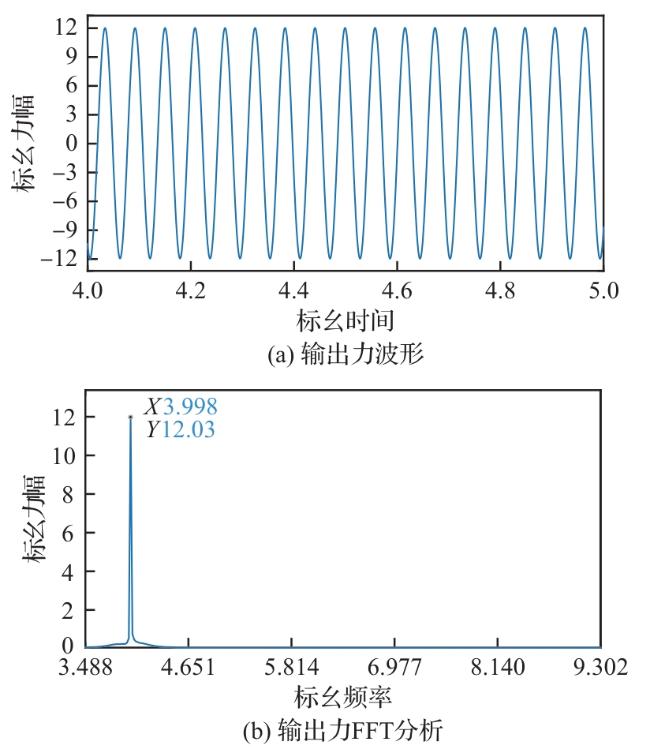
图25为工作频率4时的最大输出力波形,幅值达12.03,满足大于10的技术指标要求,频率控制误差为0.05%,满足误差<0.2%的技术指标要求,验证了作动单元质量块部分构型设计的正确性。
2) 最小力稳态性能试验
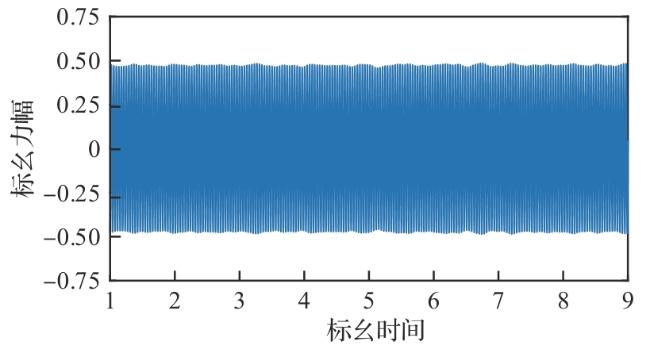
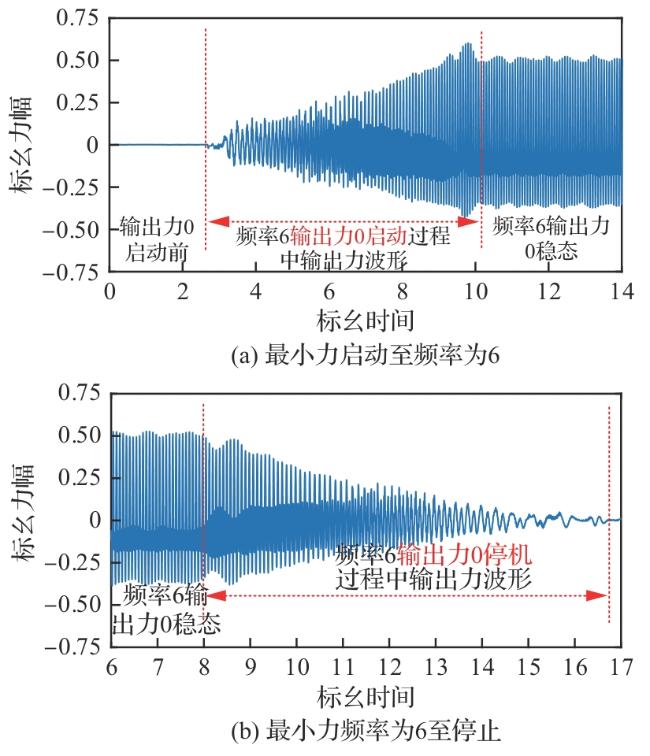
在零输出力指令工况下,工作频率6时电机控制难度大,试验波形如图26所示。最小输出力幅值为0.45,相对于频率4的工况下,幅值增大源于质量块转速升高导致的离心力增量,仍满足幅值小于0.5的技术指标要求,验证了作动单元在非工作状态下的低干扰特性。
3) 变频率动态响应试验
针对旋翼转速波动工况,测试作动单元频率切换能力。如图27所示,频率由4切换至4±1时,动态响应时间均为0.40,满足动态响应时间小于1的技术指标要求。
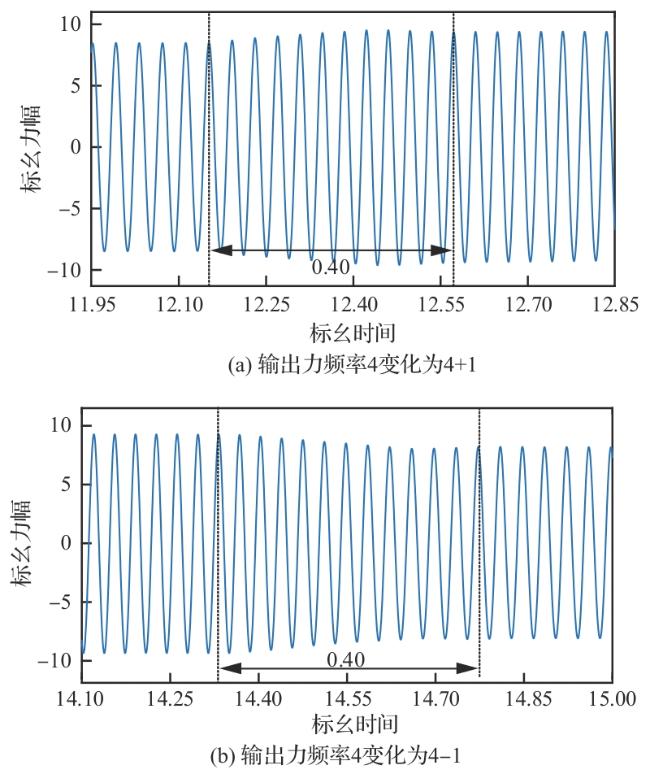
频率变化导致输出力幅值变化,因力幅指令基于固定相位差,相位差一定的情况下,电机频率发生变化则导致了输出力幅值的变化。
4) 变力幅动态响应试验
针对桨毂振动载荷幅值波动工况,测试作动单元输出力幅值变化的功能。在频率为4的工况下进行输出力变幅值动态响应试验。幅值以2为梯度,从0变化至10,输出力幅值变化动态响应波形以及局部放大波形如图28所示。
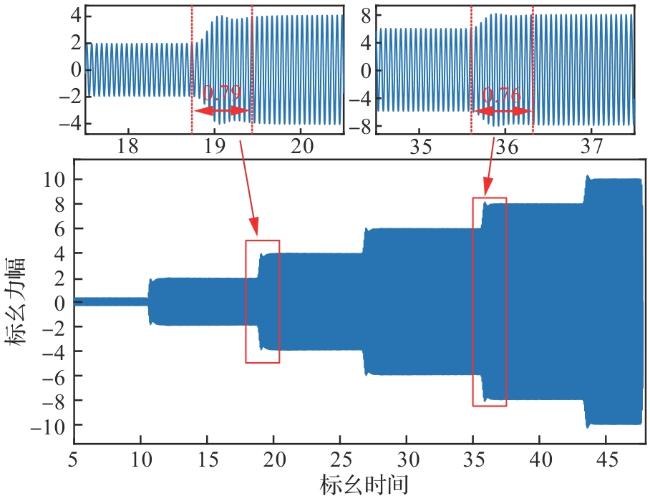
同样得到工作频率4、6下变力幅的试验数据如表5所示。输出力变力幅动态响应时间最长为0.87,均满足小于1的技术指标要求,稳态波动最大为给定值的5%。
表5 作动单元变力幅动态响应性能Table 5 Dynamic performance of actuator unit under variable force amplitudes |
| 力幅变化 | 动态响应时间 | 稳态波动 | ||
|---|---|---|---|---|
| 频率为4 | 频率为6 | 频率为4 | 频率为6 | |
| 0~2 | 0.77 | 0.61 | ±0.100 | ±0.075 |
| 2~4 | 0.79 | 0.66 | ±0.023 | ±0.120 |
| 4~6 | 0.53 | 0.87 | ±0.016 | ±0.046 |
| 6~8 | 0.76 | 0.56 | ±0.016 | ±0.001 |
| 8~10 | 0.50 | 0.64 | ±0.023 | ±0.005 |
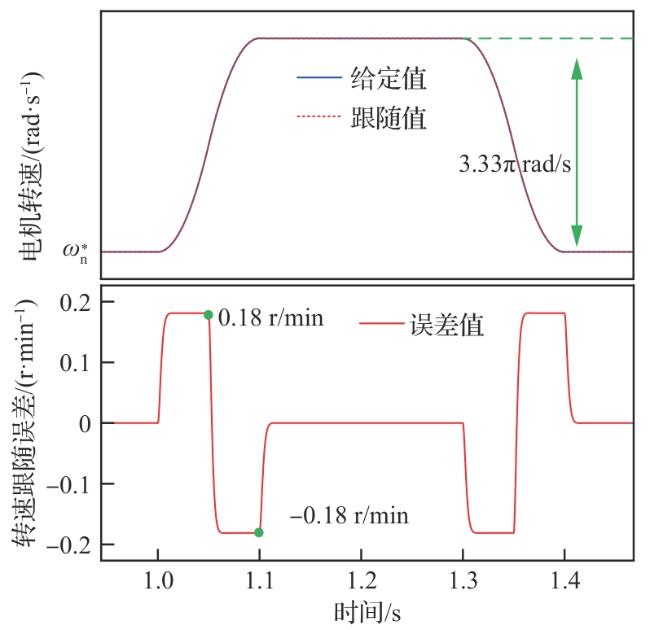
5) 变相位动态响应试验
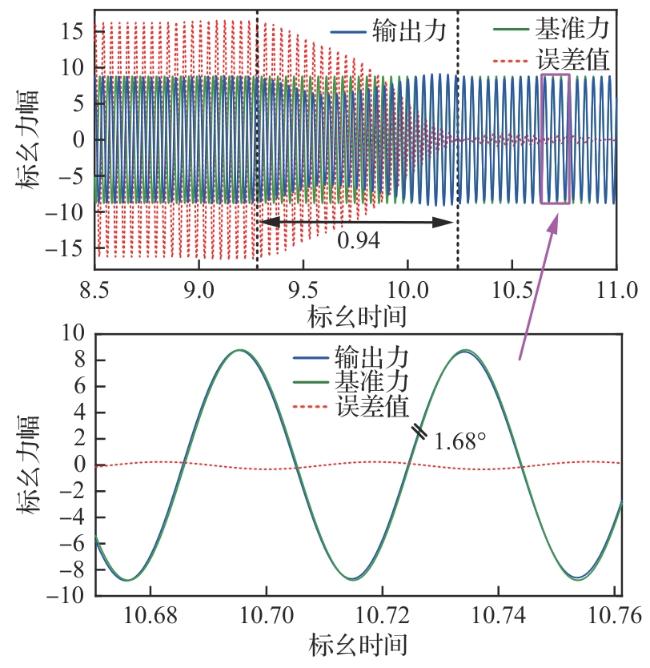
图29为在频率为6工况下进行输出力变相位90°动态响应试验,幅值为8,响应时间为0.94,在1以内,响应精度在1.8°以内,动态响应快速性和准确性均满足技术指标要求。
6) 最小力启停试验
为避免作动单元启停过程对直升机产生干扰,测试零指令下的频率6启停动态特性。如图30所示,作动单元最小力控制在±0.75以内,稳态后幅值收敛至±0.5以内,满足技术指标要求。
3.3 系统位置轨迹优化效果验证
图31为工作频率为4,输出力为8的工况下,加入双电机位置轨迹优化后,相位变化180°的动态响应试验中的电机实际转速,双电机电制动状态刚好相反。此时,转速规划曲线给定动态响应时间为0.5。

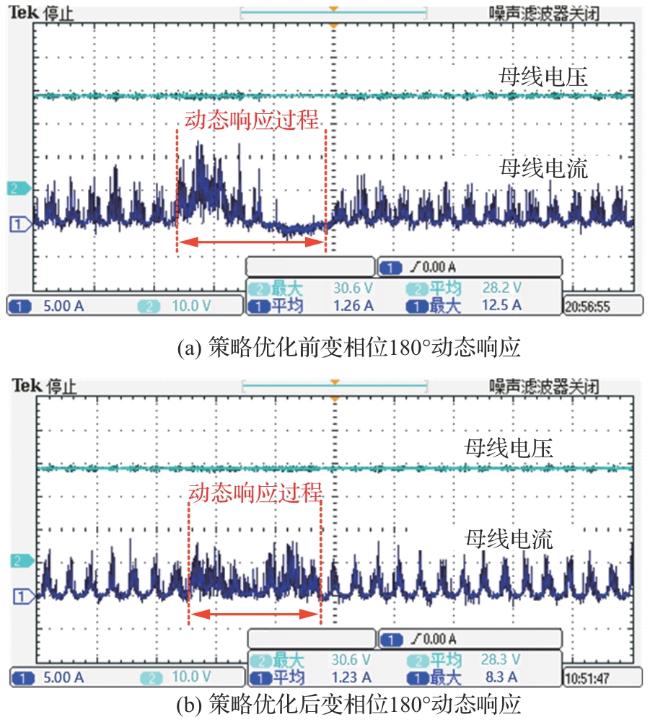
策略优化前后的母线侧电压电流波形如图32所示,未采用轨迹优化策略时,母线电流峰值达12.5 A,呈现出明显的电动-制动交替特征,电动时,母线侧电流输出增大,为双电机加速提供能量,制动时,作动单元向直流电源馈流;经轨迹优化后,动态过程母线电流冲击幅值降至8.3 A。
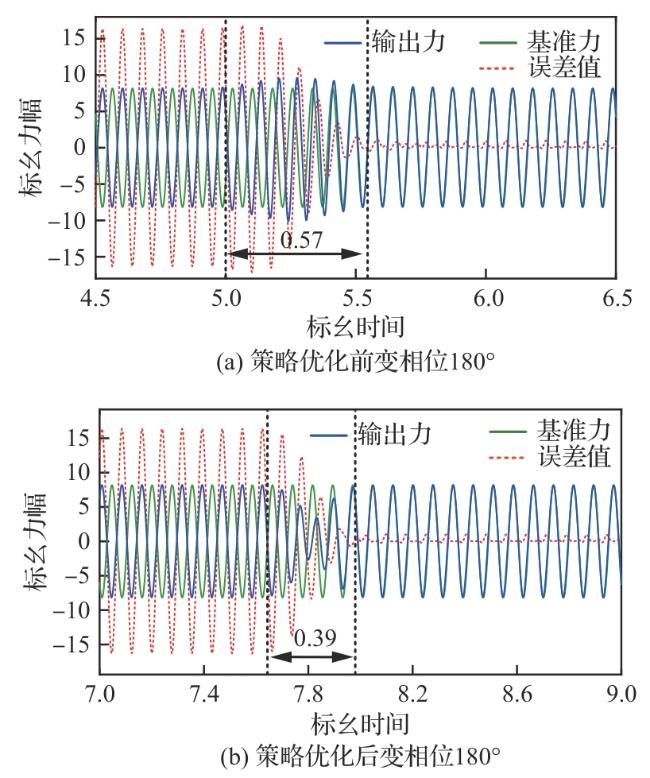
策略优化前后变相位动态响应输出力波形对比如图33所示。在相同0.5动态时间约束下,传统策略因双电机同步加速导致相位差维持恒定,输出力幅值因转速增大而增大,误差力收敛耗时0.57;而优化策略下,相位差Δθ经历先变大再变小至给定值,使输出力幅值由8变化至0再回到8的快速过渡,将误差力收敛时间缩短31.6%至0.39。该特性有效避免了相位失配期输出力对直升机的干扰,验证了位置轨迹优化控制策略在提升系统电源稳定性的同时,提高了作动单元的相位动态调节能力。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
4 结 论
1) 通过旋转坐标系下桨毂振动力数学建模确定减振需求,构建双电机协同控制模型实现输出力频率、力幅及相位三要素精准调控;根据输出力要求及实际工况,设计适用于直升机桨毂旋转工作环境下的轴偏置作动单元构型。
2) 提出位置轨迹最优控制策略,省去传统单电机伺服控制策略中的位置环路,采用二次函数规划单电机转速曲线降低跟随难度,通过双电机位置给定轨迹优化实现作动单元内电机间的电动与反馈制动的能量流动,提高系统动态响应快速性的同时降低了直流母线侧电流电压冲击。
3) 进行了作动单元工作性能验证与系统位置轨迹优化效果验证试验。标幺化试验数据表明:所设计的轴偏置结构在作动单元掉电时实现了自动质量平衡,输出激振力的最大幅值为0.11;在正常工作情况下,输出力动态响应时间最长为0.94,动态、稳态性能均满足技术指标要求;系统位置轨迹优化后,电流冲击由12.5 A降低至8.3 A。
针对桨毂顶置主动式作动系统完成了基础构型设计与控制策略验证,但面向实际装机应用,仍需突破以下核心难点:
1) 输出力相位概念均是针对静止系提出的,目前的算法只解算了旋转系的部分,后续为了应对机上环境,还应进行静止系到旋转系的控制解算。
2) 作动单元工作环境复杂,其在桨毂上产生的加速度响应与直升机结构存在耦合,后续应对直升机系统进行动力学建模,确定对电机控制系统的需求,在减振的同时降低作动单元对系统产生的不利影响。