Acta Aeronautica et Astronautica Sinica ›› 2026, Vol. 47 ›› Issue (10): 632116.doi: 10.7527/S1000-6893.2025.32116
• Special Issue: Intelligent Processing and Analysis of Aerospace Remote Sensing Images • Previous Articles
Jing DONG1, Quanfu HU1, Haiqiao LIU2, Songlai HAN1( ), Yating YAO1, Zhikang CHEN1
), Yating YAO1, Zhikang CHEN1
Received:2025-05-28
Revised:2025-06-27
Accepted:2025-09-03
Online:2025-09-12
Published:2025-09-10
Contact:
Songlai HAN
E-mail:songlai.han@csu.edu.cn
Supported by:CLC Number:
Jing DONG, Quanfu HU, Haiqiao LIU, Songlai HAN, Yating YAO, Zhikang CHEN. Image matching based airborne inertial navigation system position and heading correction method[J]. Acta Aeronautica et Astronautica Sinica, 2026, 47(10): 632116.
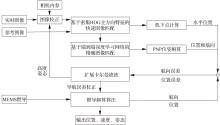
Fig.1
Overall framework of airborne inertial navigation position and heading correction method based on heterogeneous image matching
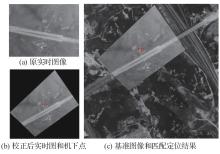
Fig.2
Nadir point localization based on fast heterogeneous image matching
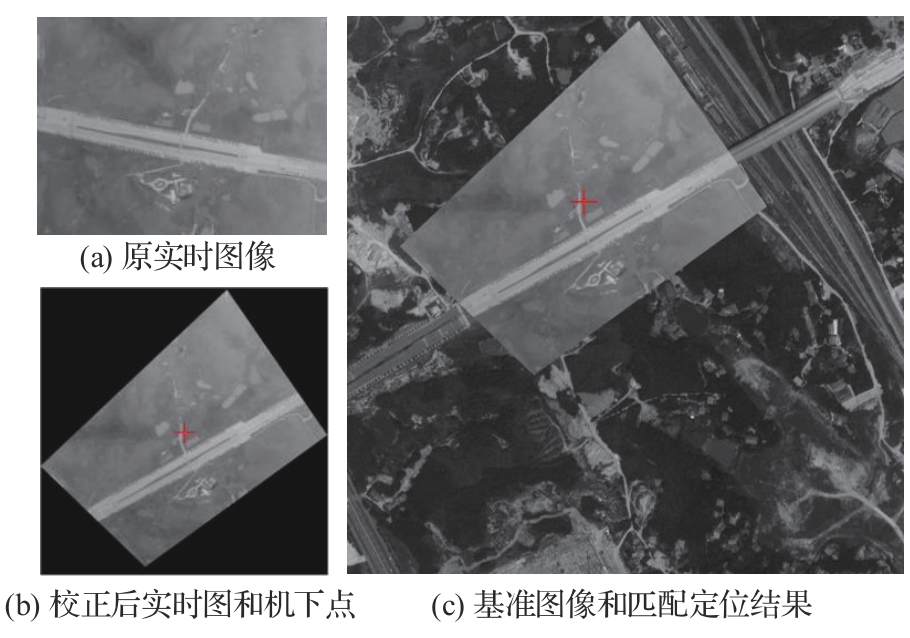
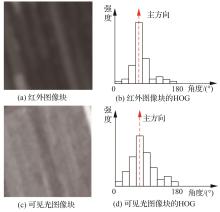
Fig.3
HOG dominant orientation extraction under nonlinear grayscale distortion and noise
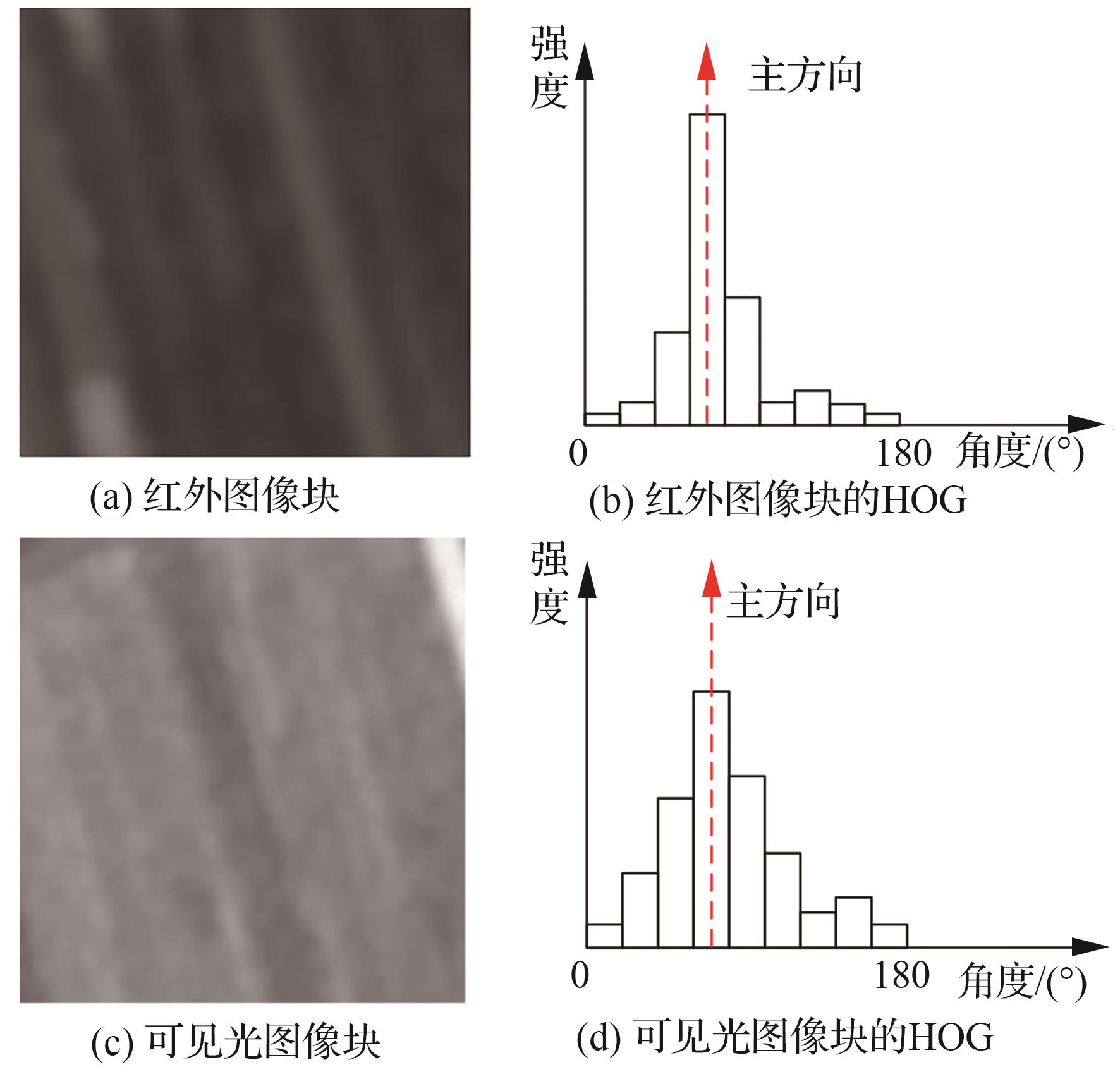

Fig.4
End-to-end deep learning matching network with parameter sharing and block-wise strategy
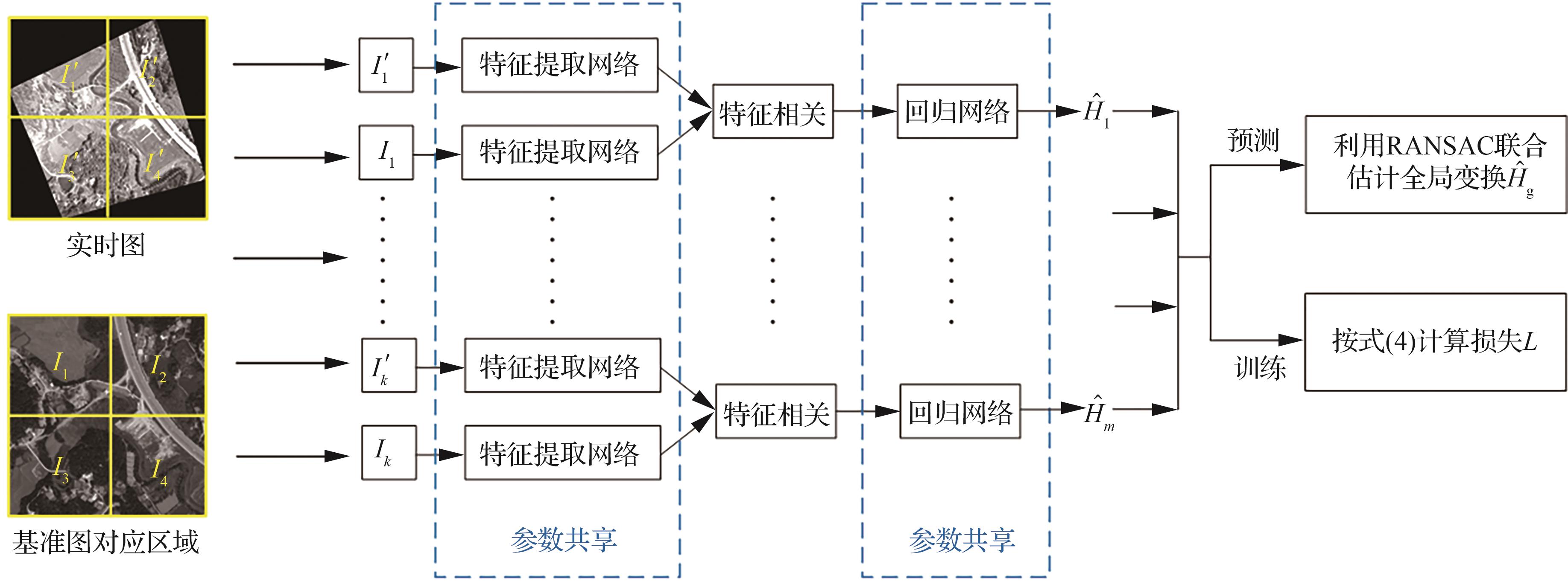

Fig.5
Architecture of regression network
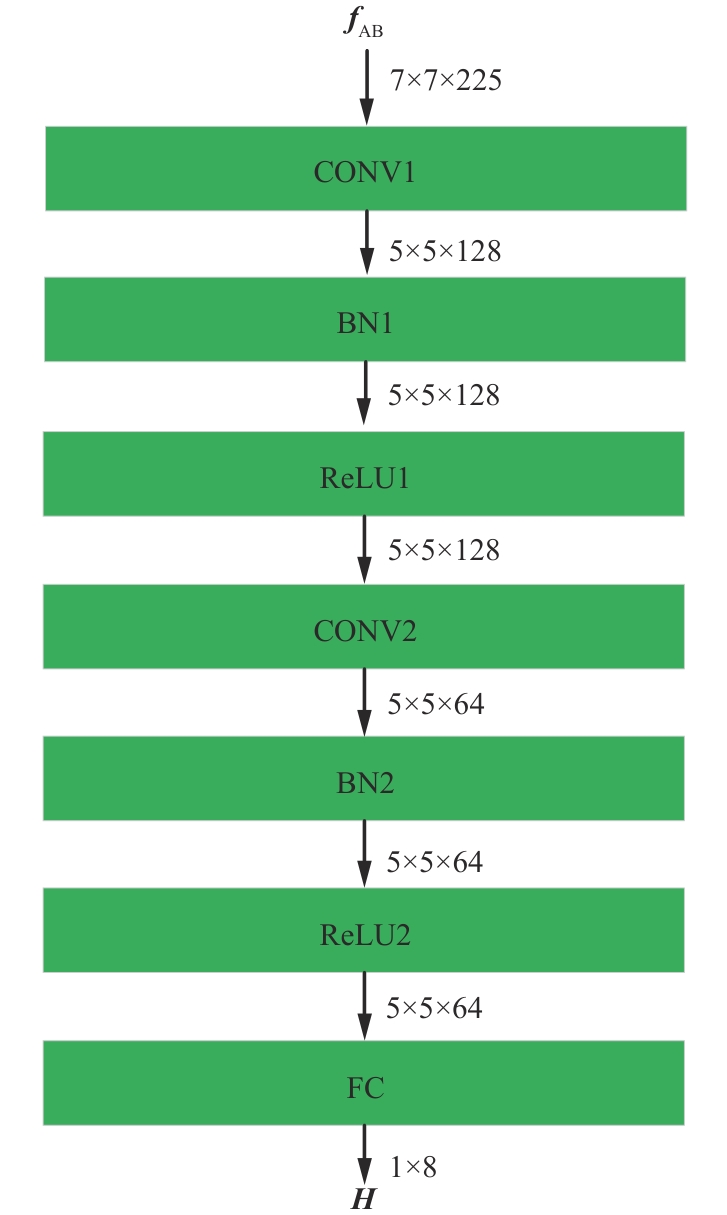
Fig.6
Data augmentation examples
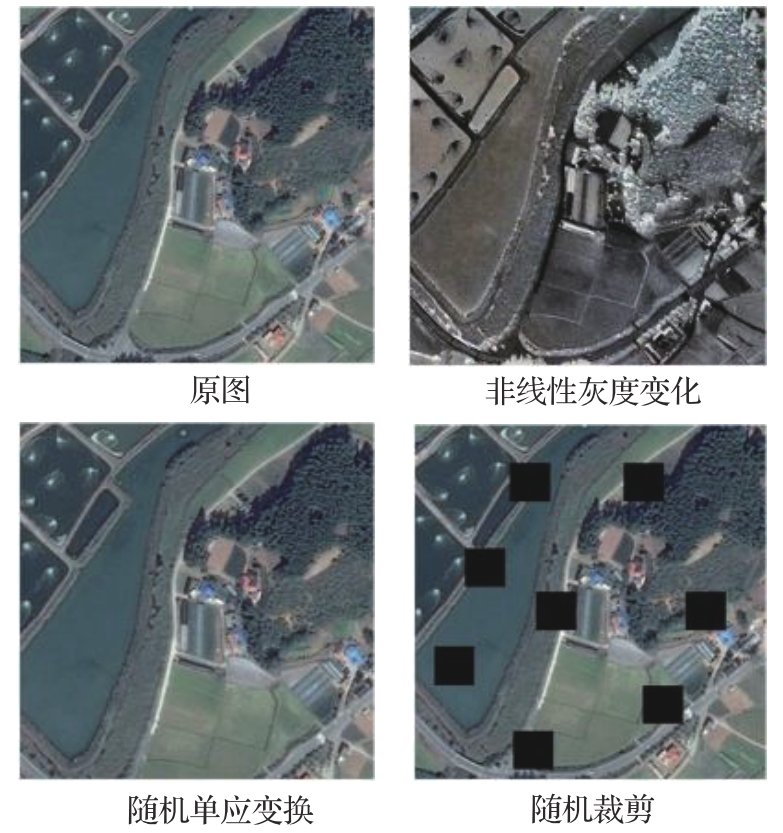
Fig.7
Results of fast heterogeneous image and accurate heterogeneous image registration
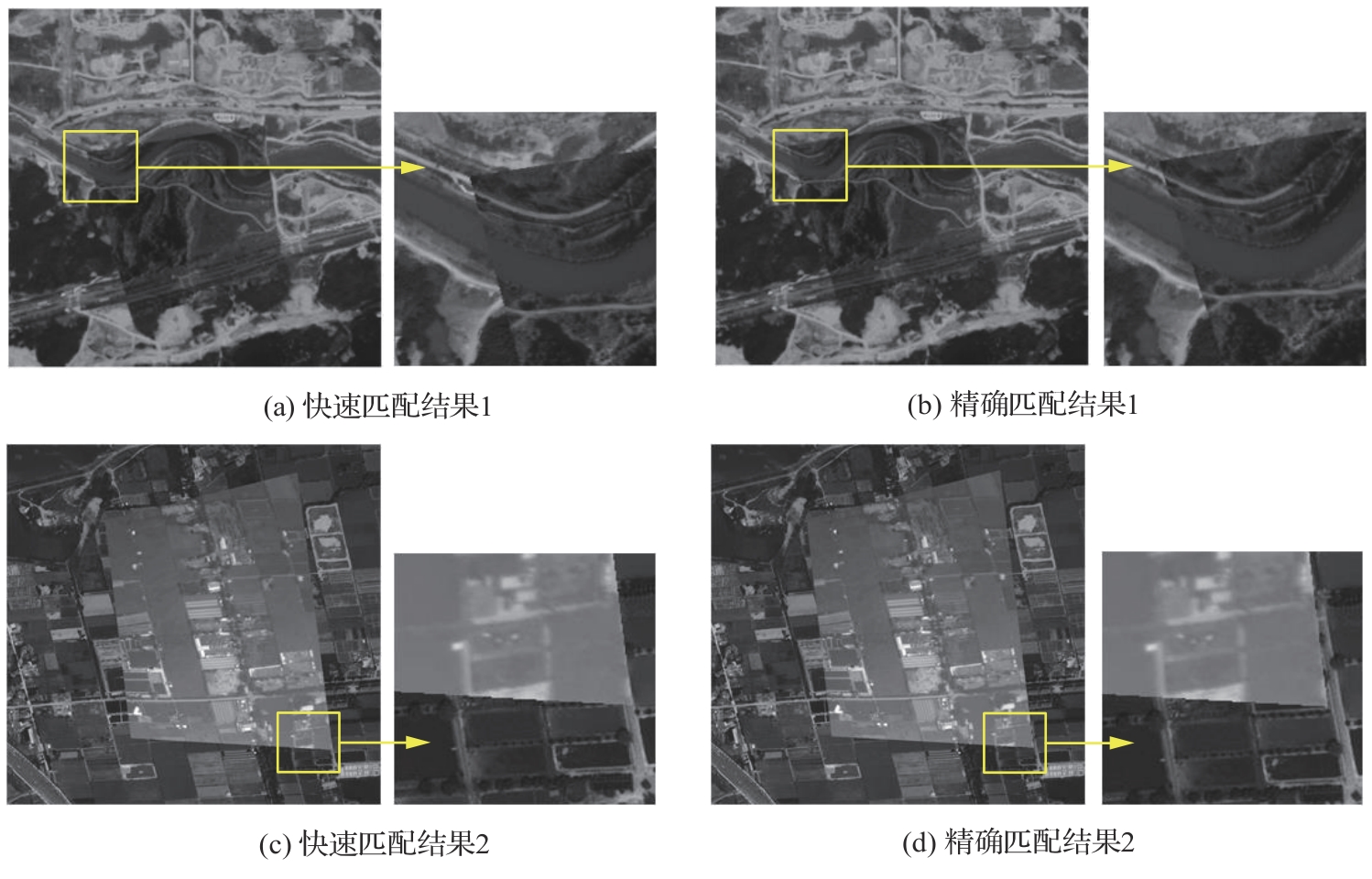

Fig.8
Image data acquisition platform
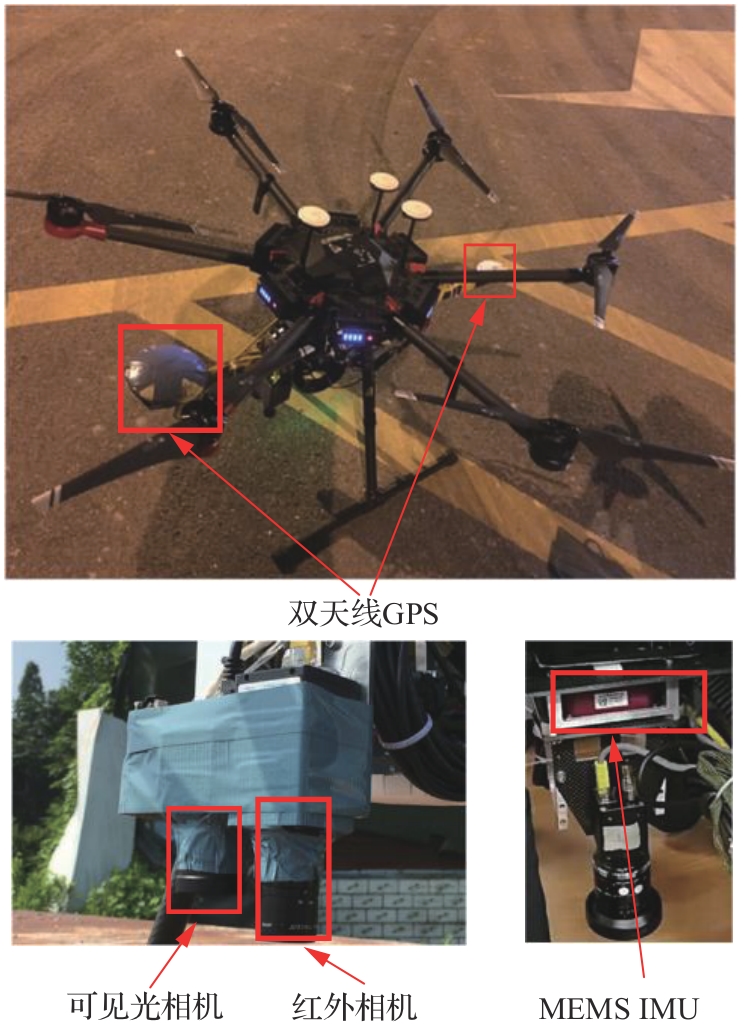
Table 1
Camera parameters
| 类型 | 参数 | 数值 |
|---|---|---|
| 红外相机 | 图像分辨率/pixel | 640×480 |
| 等效焦距/pixel | 432.5 | |
| 视场角/(°) | 73×58 | |
| 光谱范围/nm | 8 000~14 000 | |
| 可见光相机 | 图像分辨率/pixel | 2 048×2 048 |
| 等效焦距/pixel | 1 375 | |
| 视场角/(°) | 73×73 |
Table 2
MEMS inertial sensor parameters
| 传感器 | 参数 | 数值 |
|---|---|---|
| 陀螺仪 | 偏置重复性/((°)·h-1) | 0.1 |
| 比例因子重复性 | ||
| 比例因子非线性 | ||
| 加速度计 | 偏置重复性/mg | |
| 噪声密度/(μg·Hz-1/2) | ||
| 比例因子非线性 |
Table 3
Drone flight parameters
飞行 编号 | 平均 高度/m | 距离/m | 平均速度/ (m·s-1) | 相机 类型 |
|---|---|---|---|---|
| Flight1 | 328 | 1 130.6 | 4.7 | 可见光 |
| Flight2 | 273 | 412.1 | 5.1 | 可见光 |
| Flight3 | 501 | 1 213.6 | 4.9 | 红外 |
| Flight4 | 521 | 1 248.6 | 4.0 | 红外 |
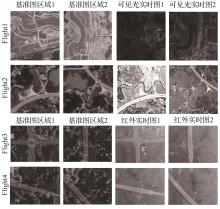
Fig.9
Aerial images and satellite reference images
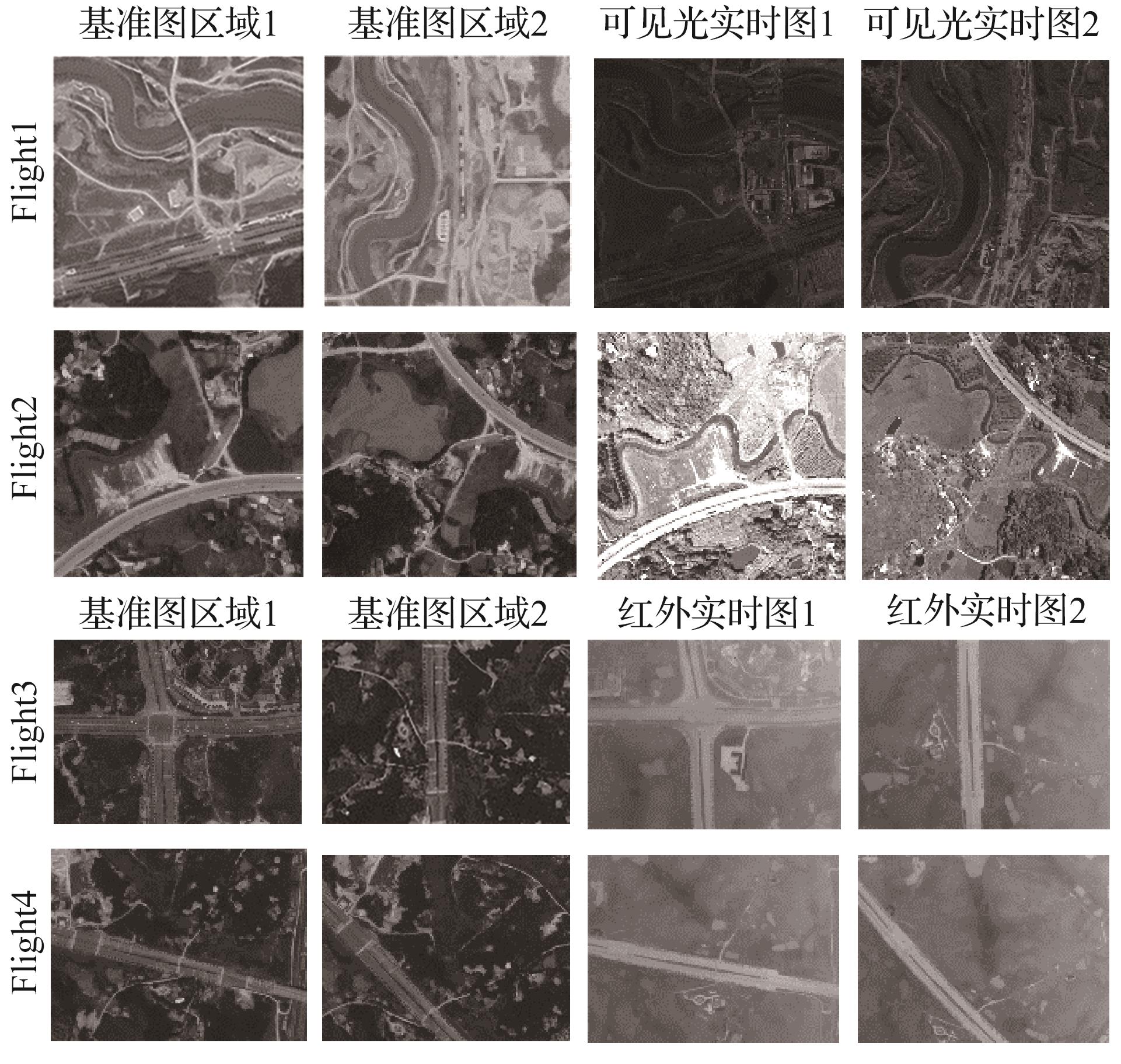
Table 4
CMR of three positioning algorithms
| 飞行编号 | CMR/% | ||
|---|---|---|---|
| 本文方法 | HOP | SIVL | |
| Flight1 | 99.5 | 98.7 | 95.6 |
| Flight2 | 99.3 | 99.3 | 92.8 |
| Flight3 | 99.1 | 72.0 | 40.4 |
| Flight4 | 98.9 | 64.2 | 46.4 |
Table 5
RMSE of three matching positioning algorithms
| 飞行编号 | 定位误差RMSE/m | |||
|---|---|---|---|---|
本文精确 匹配 | 本文快速 粗匹配 | HOP | SIVL | |
| Flight1 | 4.53 | 6.72 | 7.01 | 12.71 |
| Flight2 | 4.01 | 6.23 | 8.79 | 13.77 |
| Flight3 | 5.97 | 8.76 | 9.94 | 14.22 |
| Flight4 | 4.35 | 9.15 | 9.07 | 15.89 |
Fig.10
Examples of matching results
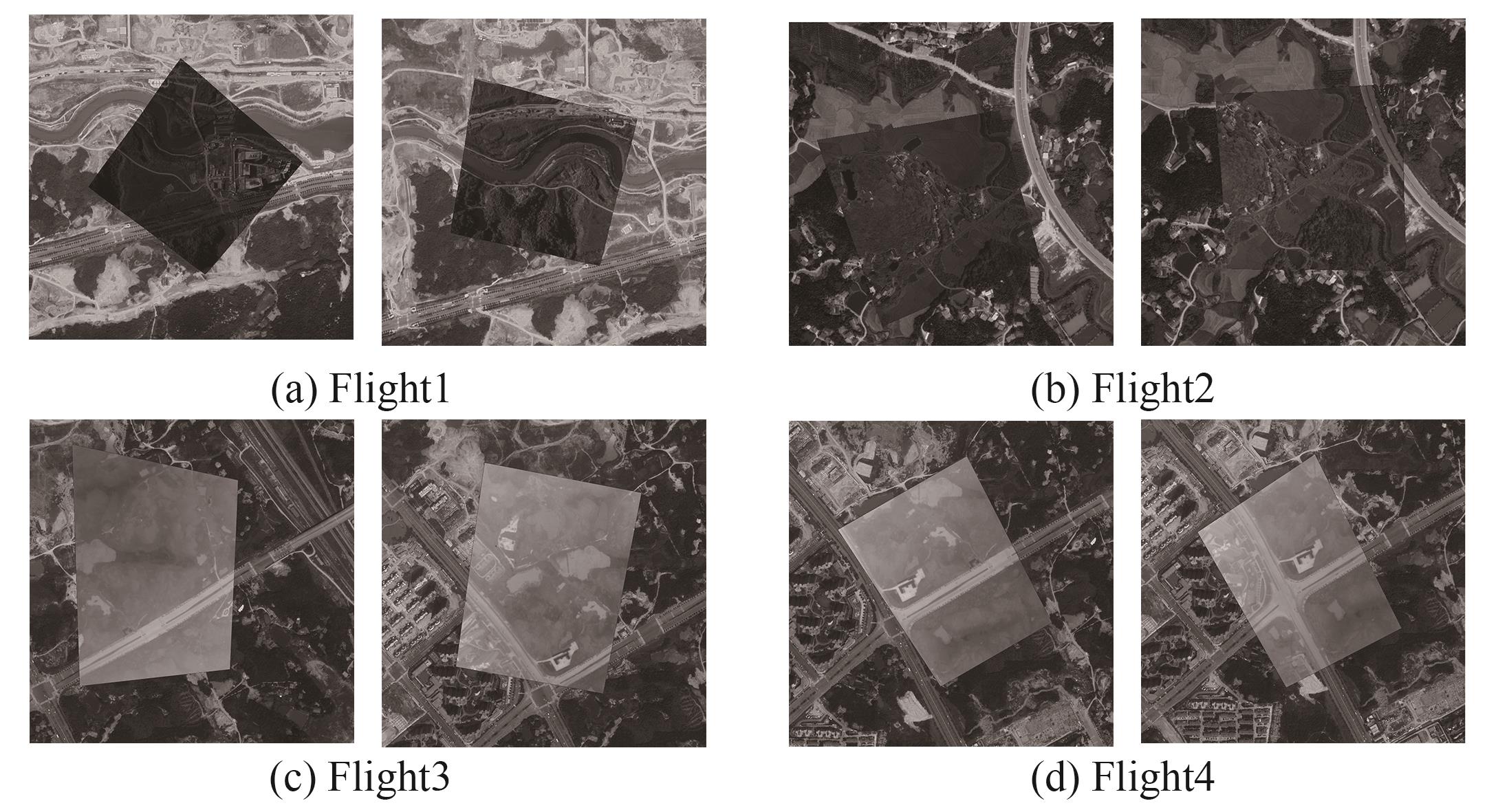

Fig.11
Fusion navigation trajectory map
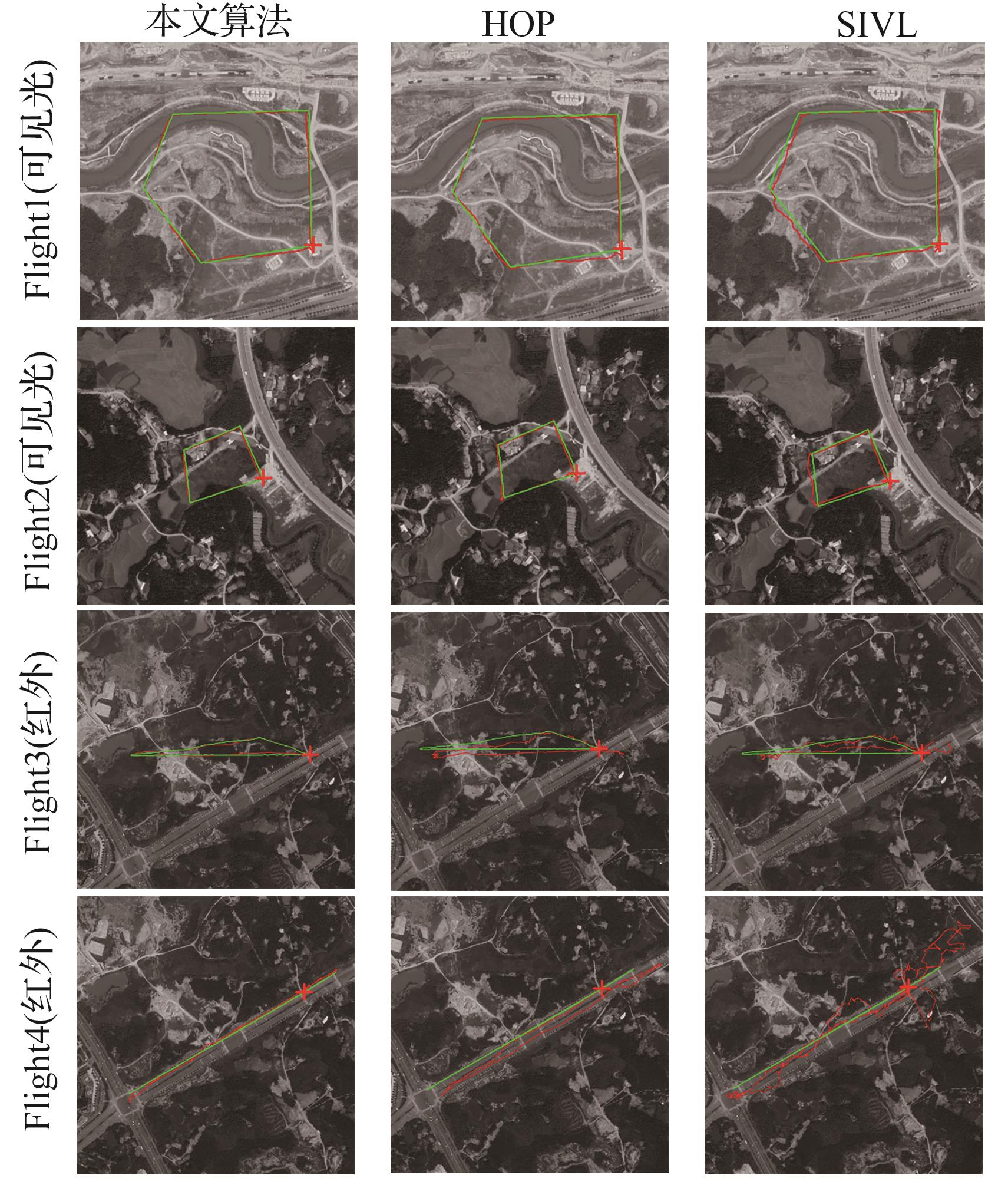
Table 6
Heading accuracy of three integrated navigation algorithms RMSE
| 飞行编号 | 航向精度RMSE/(°) | ||
|---|---|---|---|
| 本文算法 | HOP | SIVL | |
| Flight1 | 2.33 | 7.39 | 8.24 |
| Flight2 | 1.98 | 5.48 | 6.79 |
| Flight3 | 2.40 | 6.94 | 8.91 |
| Flight4 | 2.57 | 8.01 | 10.02 |
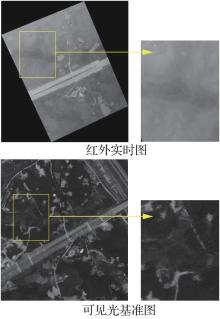
Fig.12
Feature mismatch examples
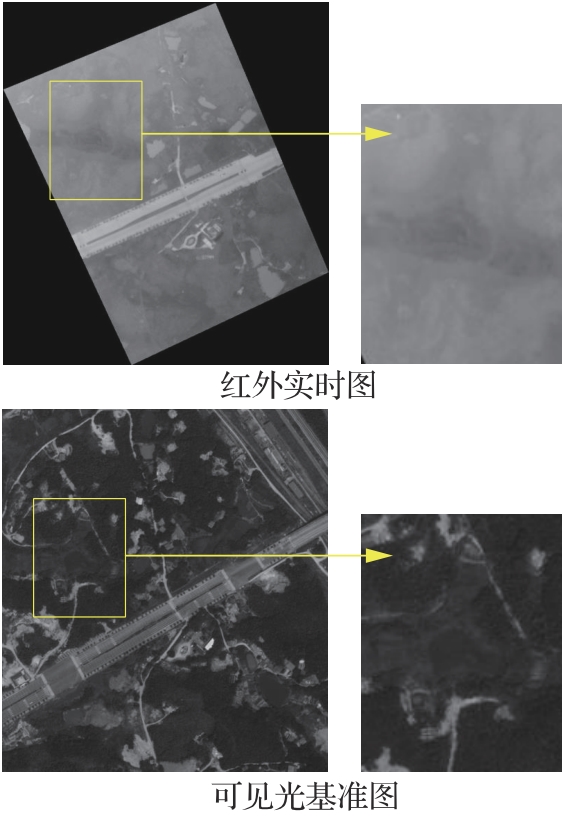
Table 7
Computation time of rough matching algorithm
图像 类型 | 实时图像校正后 分辨率/pixel | 基准图搜索区 图像分辨率/pixel | 快速匹配 耗时/ms |
|---|---|---|---|
| 红外 | 320×240 | 512×384 | 49.2 |
| 可见光 | 320×320 | 512×512 | 51.3 |
Table 8
Computation time of precise matching algorithm
图像 类型 | 图像分辨 率/pixel | 基准图对应区域 分辨率/pixel | 分块 数量 | 精确匹配 耗时/ms |
|---|---|---|---|---|
| 红外 | 640×480 | 640×480 | 6 | 1 539.3 |
| 可见光 | 480×480 | 480×480 | 4 | 1 157.1 |
| [1] | LIN J R, ZHANG F. R3LIVE: A robust, real-time, RGB-colored, LiDAR-inertial-visual tightly-coupled state estimation and mapping package[C]∥2022 International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2022: 10672-10678. |
| [2] | 周治国, 邸顺帆. 基于强度扫描上下文回环检测的激光雷达SLAM算法[J]. 中国惯性技术学报, 2022, 30(6): 738-745. |
| ZHOU Z G, DI S F. Lidar SLAM based on intensity scan context loop closure detection[J]. Journal of Chinese Inertial Technology, 2022, 30(6): 738-745 (in Chinese). | |
| [3] | SHAN M, WANG F, LIN F, et al. Google map aided visual navigation for UAVs in GPS-denied environment[C]∥2015 IEEE International Conference on Robotics and Biomimetics (ROBIO). Piscataway: IEEE Press, 2015: 114-119. |
| [4] | KINNARI J, VERDOJA F, KYRKI V. Season-invariant GNSS-denied visual localization for UAVs[J]. IEEE Robotics and Automation Letters, 2022, 7(4): 10232-10239. |
| [5] | LOWE D G. Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004, 60(2): 91-110. |
| [6] | BAY H, TUYTELAARS T, VAN GOOL L. SURF: Speeded up robust features[C]∥Computer Vision-ECCV 2006. Berlin: Springer, 2006: 404-417. |
| [7] | RUBLEE E, RABAUD V, KONOLIGE K, et al. ORB: An efficient alternative to SIFT or SURF[C]∥2011 International Conference on Computer Vision. Piscataway: IEEE Press, 2011: 2564-2571. |
| [8] | LI J Y, HU Q W, AI M Y. RIFT: Multi-modal image matching based on radiation-variation insensitive feature transform[J]. IEEE Transactions on Image Processing, 2019, 29: 3296-3310. |
| [9] | HAN X F, LEUNG T, JIA Y Q, et al. MatchNet: Unifying feature and metric learning for patch-based matching[C]∥2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2015: 3279-3286. |
| [10] | 叶熠彬, 滕锡超, 于起峰, 等. 基于MatchNet和多点匹配约束的可见光-SAR图像匹配[J]. 航空学报, 2024, 45(10): 329162. |
| YE Y B, TENG X C, YU Q F, et al. Optical-SAR image matching based on MatchNet and multi-point matching constraint[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(10): 329162 (in Chinese). | |
| [11] | 刘磊, 李元祥, 倪润生, 等. 基于卷积与图神经网络的合成孔径雷达与可见光图像配准[J]. 光学学报, 2022, 42(24): 110-120. |
| LIU L, LI Y X, NI R S, et al. Synthetic aperture radar and optical images registration based on convolutional and graph neural networks[J]. Acta Optica Sinica, 2022, 42(24): 110-120 (in Chinese). | |
| [12] | JIANG H W, KARPUR A, CAO B Y, et al. OmniGlue: Generalizable feature matching with foundation model guidance[C]∥2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2024: 19865-19875. |
| [13] | SARLIN P E, DETONE D, MALISIEWICZ T, et al. SuperGlue: Learning feature matching with graph neural networks[C]∥2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2020: 4937-4946. |
| [14] | LINDENBERGER P, SARLIN P E, POLLEFEYS M. LightGlue: Local feature matching at light speed[C]∥2023 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE Press, 2023: 17581-17592. |
| [15] | ZHANG W, LI T T, ZHANG Y T, et al. LTFormer: A light-weight transformer-based self-supervised matching network for heterogeneous remote sensing images[J]. Information Fusion, 2024, 109: 102425. |
| [16] | REVAUD J, WEINZAEPFEL P, HARCHAOUI Z, et al. DeepMatching: Hierarchical deformable dense matching[J]. International Journal of Computer Vision, 2016, 120(3): 300-323. |
| [17] | YE Y X, SHAN J, BRUZZONE L, et al. Robust registration of multimodal remote sensing images based on structural similarity[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(5): 2941-2958. |
| [18] | ZHAI F C, ZENG Q H, LI J, et al. Iterative geolocation based on cross-view image registration (IGCIR) for long-range targets[J]. Chinese Journal of Aeronautics, 2025, 38(7): 103483. |
| [19] | PARK J H, NAM W J, LEE S W. A two-stream symmetric network with bidirectional ensemble for aerial image matching[J]. Remote Sensing, 2020, 12(3): 465. |
| [20] | ZHANG H, LEI L, NI W P, et al. Optical and SAR image dense registration using a robust deep optical flow framework[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2023, 16: 1269-1294. |
| [21] | MUR-ARTAL R, MONTIEL J M M, TARDÓS J D. ORB-SLAM: A versatile and accurate monocular SLAM system[J]. IEEE Transactions on Robotics, 2015, 31(5): 1147-1163. |
| [22] | GOFORTH H, LUCEY S. GPS-denied UAV localization using pre-existing satellite imagery[C]∥2019 International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2019: 2974-2980. |
| [23] | CHANG C H, CHOU C N, CHANG E Y. CLKN: Cascaded Lucas-kanade networks for image alignment[C]∥2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2017: 3777-3785. |
| [24] | CHEN N H, LOU T S, ZHAO L Y. MMHCA: Multi-feature representations based on multi-scale hierarchical contextual aggregation for UAV-view geo-localization[J]. Chinese Journal of Aeronautics, 2025, 38(6): 103242. |
| [25] | WANG H Y, ZHOU F H, WU Q H. Accurate vision-enabled UAV location using feature-enhanced transformer-driven image matching[J]. IEEE Transactions on Instrumentation and Measurement, 2024, 73: 5502511. |
| [26] | SAMANO N, ZHOU M J, CALWAY A. Global aerial localisation using image and map embeddings[C]∥2021 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2021: 5788-5794. |
| [27] | BARRON J L, FLEET D J, BEAUCHEMIN S S. Performance of optical flow techniques[J]. International Journal of Computer Vision, 1994, 12(1): 43-77. |
| [28] | HE Y, CISNEROS I, KEETHA N, et al. Foundloc: Vision-based onboard aerial localization in the wild[DB/OL]. arXiv preprint: 2310.16299, 2023. |
| [29] | LI M K, WANG Z M, HUO G, et al. A deep learning framework with geographic information adaptive loss for remote sensing images based UAV self-positioning[DB/OL]. arXiv preprint: 2502.16164, 2025. |
| [30] | HARTLEY R, ZISSERMAN A.计算机视觉中的多视图几何[M]. 韦穗, 章权兵, 译. 第2版. 北京: 机械工业出版社, 2019: 157-158. |
| RICARD HARTLEY, ANDREW ZISSERMAN. Mul-tiple view geometry in computer vision[M].WEI H, ZHANG Q B, translated. Version 2. Beijing:China Machine Press, 2019:157-158. | |
| [31] | GAO X S, HOU X R, TANG J L, et al. Complete solution classification for the perspective-three-point problem[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2003, 25(8): 930-943. |
| [32] | WEI Y C, TAO L T. Efficient histogram-based sliding window[C]∥2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2010: 3003-3010. |
| [33] | OUYANG W L, TOMBARI F, MATTOCCIA S, et al. Performance evaluation of full search equivalent pattern matching algorithms[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(1): 127-143. |
| [34] | ROCCO I, ARANDJELOVIC R, SIVIC J. End-to-end weakly-supervised semantic alignment[C]∥2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 6917-6925. |
| [35] | FISCHLER M A, BOLLES R C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography[J]. Communications of the ACM, 1981, 24(6): 381-395. |
| [36] | XIE S N, GIRSHICK R, DOLLÁR P, et al. Aggregated residual transformations for deep neural networks[C]∥2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2017: 5987-5995. |
| [37] | RIBEIRO M I. Kalman and extended Kalman filters: Concept, derivation and properties[J]. Institute for Systems and Robotics, 2004, 43(46): 3736-3741. |
| [38] | SAVAGE P G. Strapdown inertial navigation integration algorithm design part 2: Velocity and position algorithms[J]. Journal of Guidance, Control, and Dynamics, 1998, 21(2): 208-221. |
| [39] | FURGALE P, REHDER J, SIEGWART R. Unified temporal and spatial calibration for multi-sensor systems[C]∥2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2013: 1280-1286. |
| [40] | LUO Y, CHA H, ZUO L, et al. General cross-modality registration framework for visible and infrared UAV target image registration[J]. Scientific Reports, 2023, 13(1):12941. |
| [1] | Zihan NAN, Ruiyang ZHOU, Yongliang WANG, Dayu LIU, Ming DONG, Fanchen MENG. A robust filtering autonomous navigation method based on interactive dynamic and static multi-models in denied environments [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(24): 332062-332062. |
| [2] | Jianhua CHENG, Sixiang CHENG, Bing QI, Shilong FAN, Guojing ZHAO, Sicheng CHEN. PPP/INS integrated navigation performance analysis in ionospheric scintillation environment [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730676-730676. |
| [3] | Zihan NAN, Dayu LIU, Ming DONG, Wenning LIANG, Xuewei ZHAO, Yilin MA, Yao GUAN. Robust filtering method for GNSS denied multi-source autonomous navigation [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730782-730782. |
| [4] | Kun LI, Shuhui BU, Xuan JIA, Yifei DONG, Lin CHEN. Relative aircraft positioning based on inertial navigation and datalink [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(15): 329594-329594. |
| [5] | Shifeng ZHANG, Jun LI, Huabo YANG. Review of inertial guidance instrumental error separation techniques [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 528590-528590. |
| [6] | DONG Xinhao, ZHOU Zhijie, HU Changhua, FENG Zhichao, CAO You. Performance evaluation method for inertial system based on hierarchical belief rule base [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(7): 324456-324456. |
| [7] | WANG Wei, XING Chaoyang, FENG Wenshuai. State of the art and perspectives of autonomous navigation technology [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(11): 525049-525049. |
| [8] | LIANG Shuai, YANG Lin, YANG Zhaoxu, XU Bin. Kalman filter based T-S fuzzy control for morphing aircraft [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(S2): 724274-724274. |
| [9] | SONG Ningfang, YANG Yanqiang. Deep fusion navigation technology of missile-borne Stellar-INS with LFOV [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(8): 623674-623674. |
| [10] | YANG Zhaoxu, GUO Yi, LEI Tingwan, LI Rongbing. Air data fusion and estimation method for advanced aircrafts in post-stall maneuver [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(6): 523456-523456. |
| [11] | LU Hang, HAO Shunyi, PENG Zhiying, HUANG Guorong. Application of marginal reduced high-degree cubature Kalman filter to nonlinear rapid transfer alignment [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2019, 40(3): 322390-322390. |
| [12] | WANG Zhiwei, WANG Fengjie, DI Changchun, SHI Zhiyong, YANG Gongliu. Nonlinear alignment method for land SINS [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2018, 39(1): 321554-321554. |
| [13] | QIAN Chao, ZHANG Zijian, LI Dawei. On-line reliability assessment of platform inertial navigation system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2017, 38(9): 321259-321259. |
| [14] | ZENG Qinghua, PAN Pengju, LIU Jianye, WANG Yunshu, LIU Sheng. Fast and accurate target positioning with large viewpoint based on inertial navigation system information [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2017, 38(8): 321171-321171. |
| [15] | GUO Qi, ZHOU Zhaofa, SUN Lijiang, XU Zihao, CHEN He. Size parameters identification and rotation project design for single-axis rotary SINS [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2017, 38(10): 320841-320841. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341