Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (11): 531399.doi: 10.7527/S1000-6893.2025.31399
• Reviews • Previous Articles
Yongnan JIA1,2( )
)
Received:2024-10-13
Revised:2024-12-12
Accepted:2025-04-07
Online:2025-04-29
Published:2025-04-25
Contact:
Yongnan JIA
E-mail:ynjia@pku.edu.cn
CLC Number:
Yongnan JIA. A scheme for unmanned aerial system traffic management in low-altitude airspace[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531399.

Fig.1
Low-altitude economy and general aviation
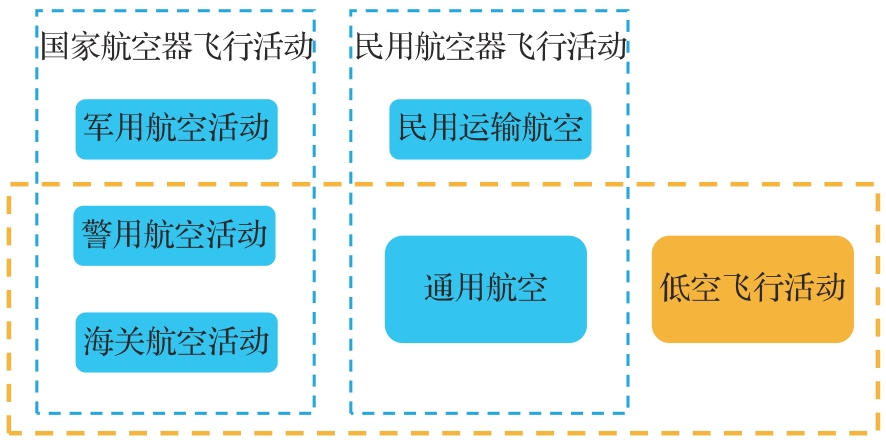
Fig.2
Operational context of ATM and UTM services[2]
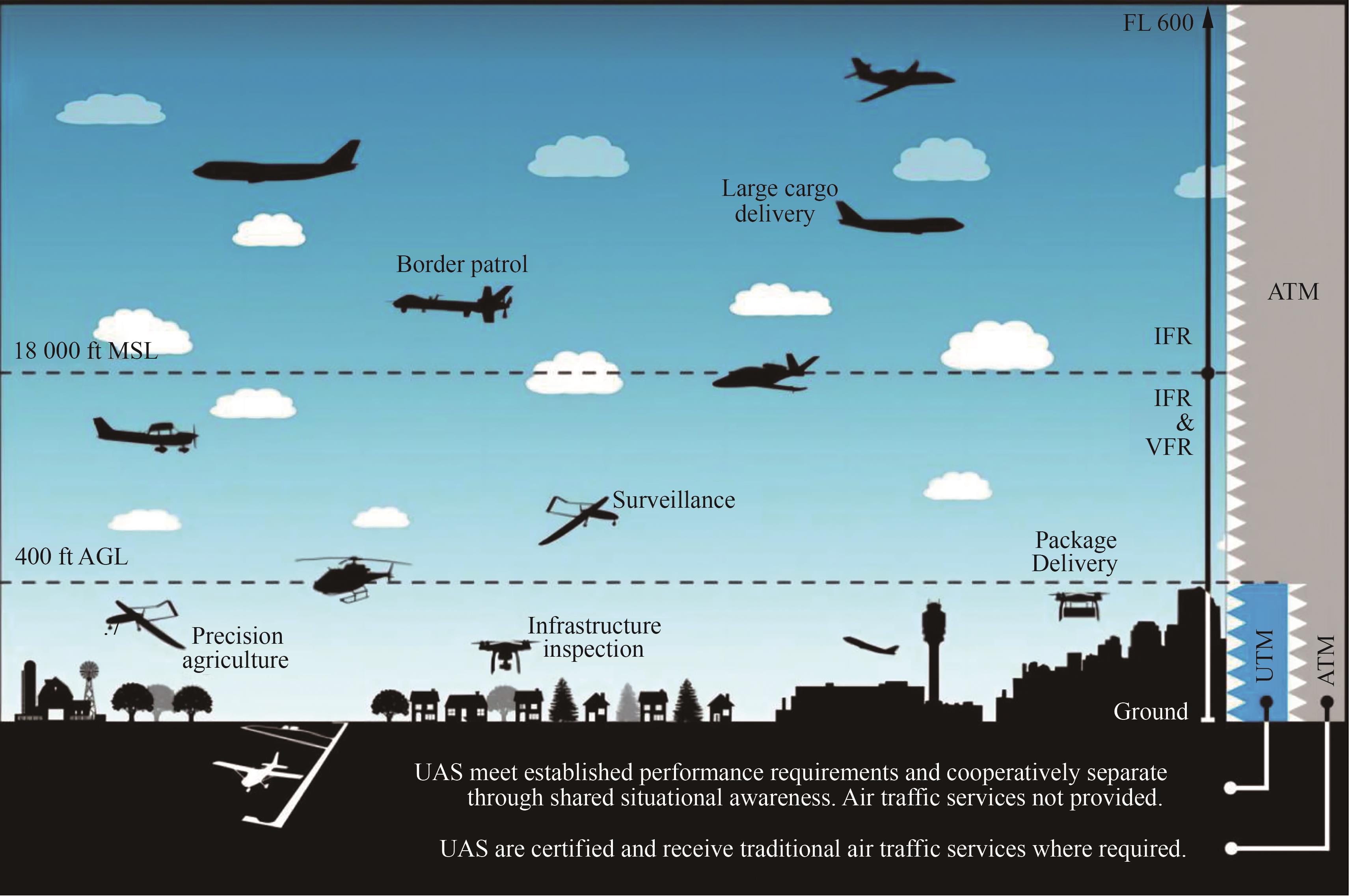
Fig.3
Airspace division in USA[5]
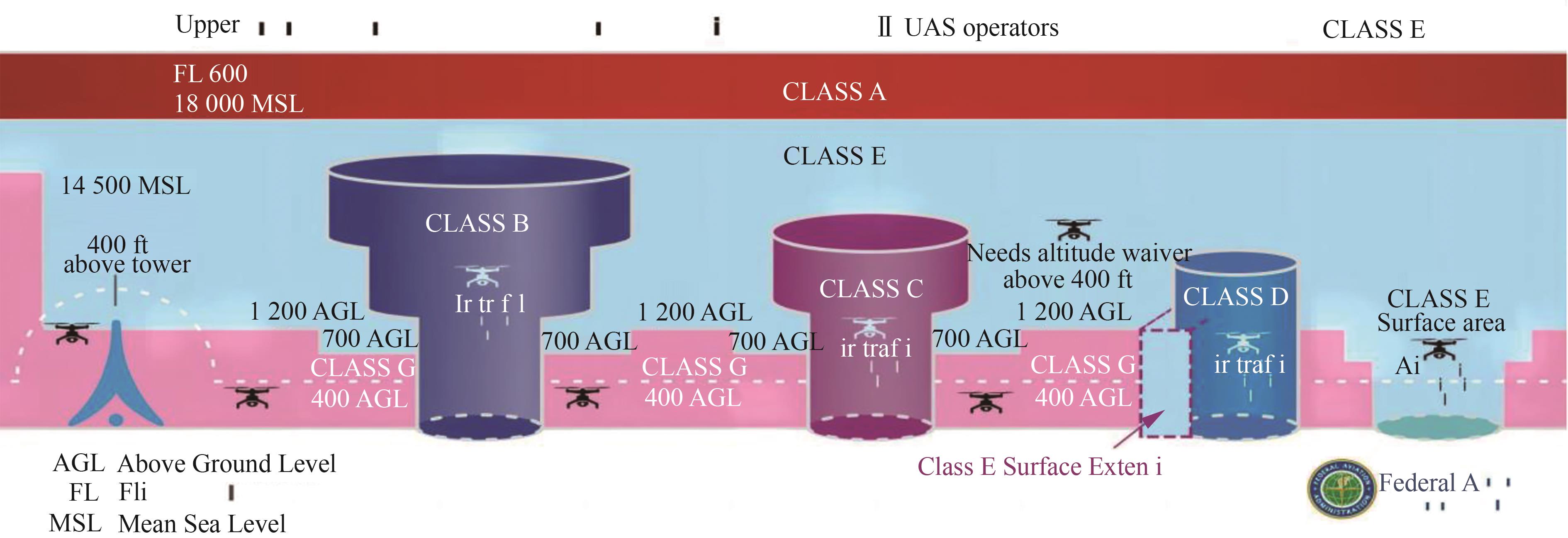
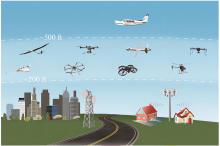
Fig.4
NASA’s concept for a possible UTM system[17]
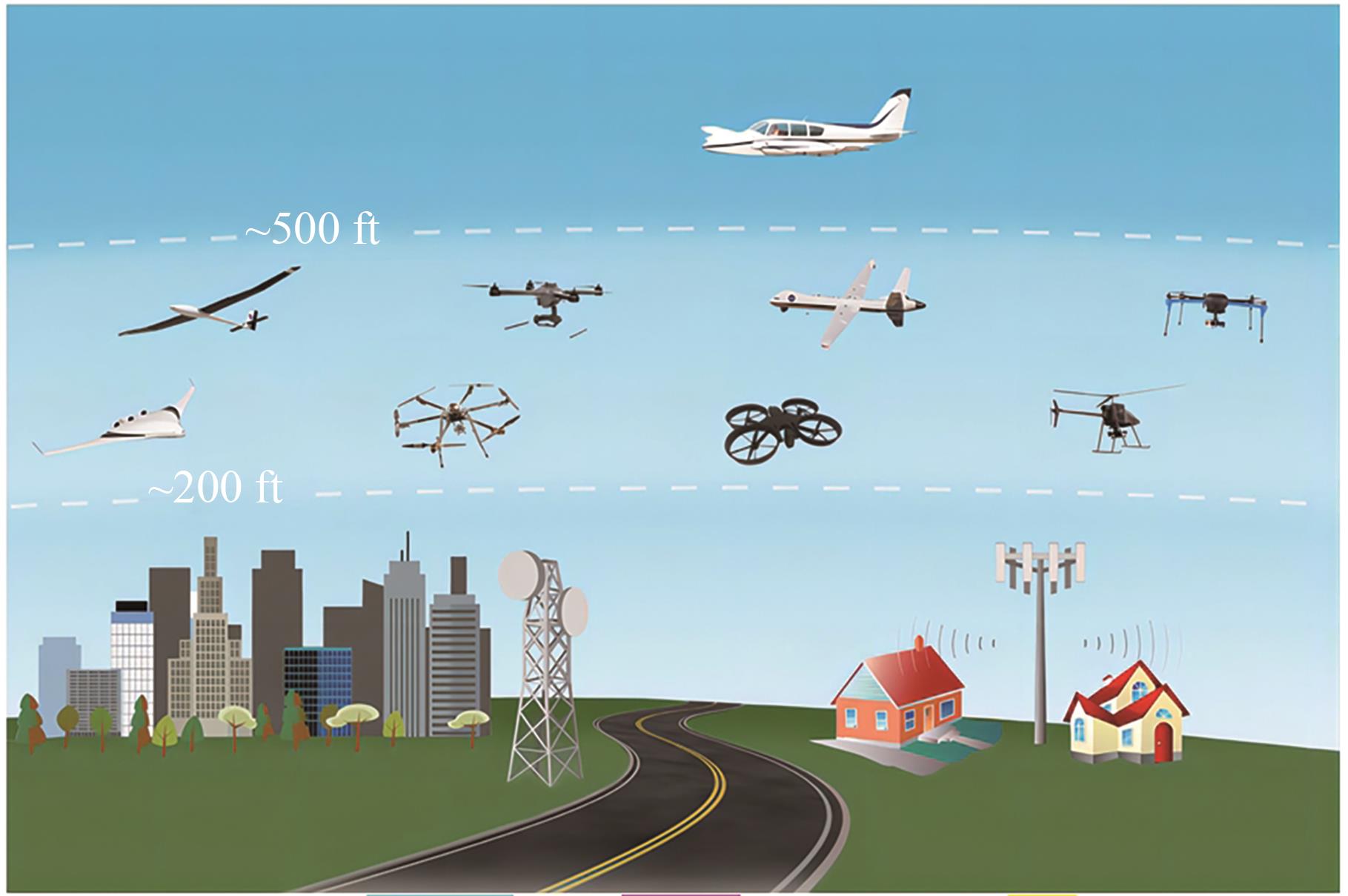

Fig.5
UTM system framework proposed by NASA[2]
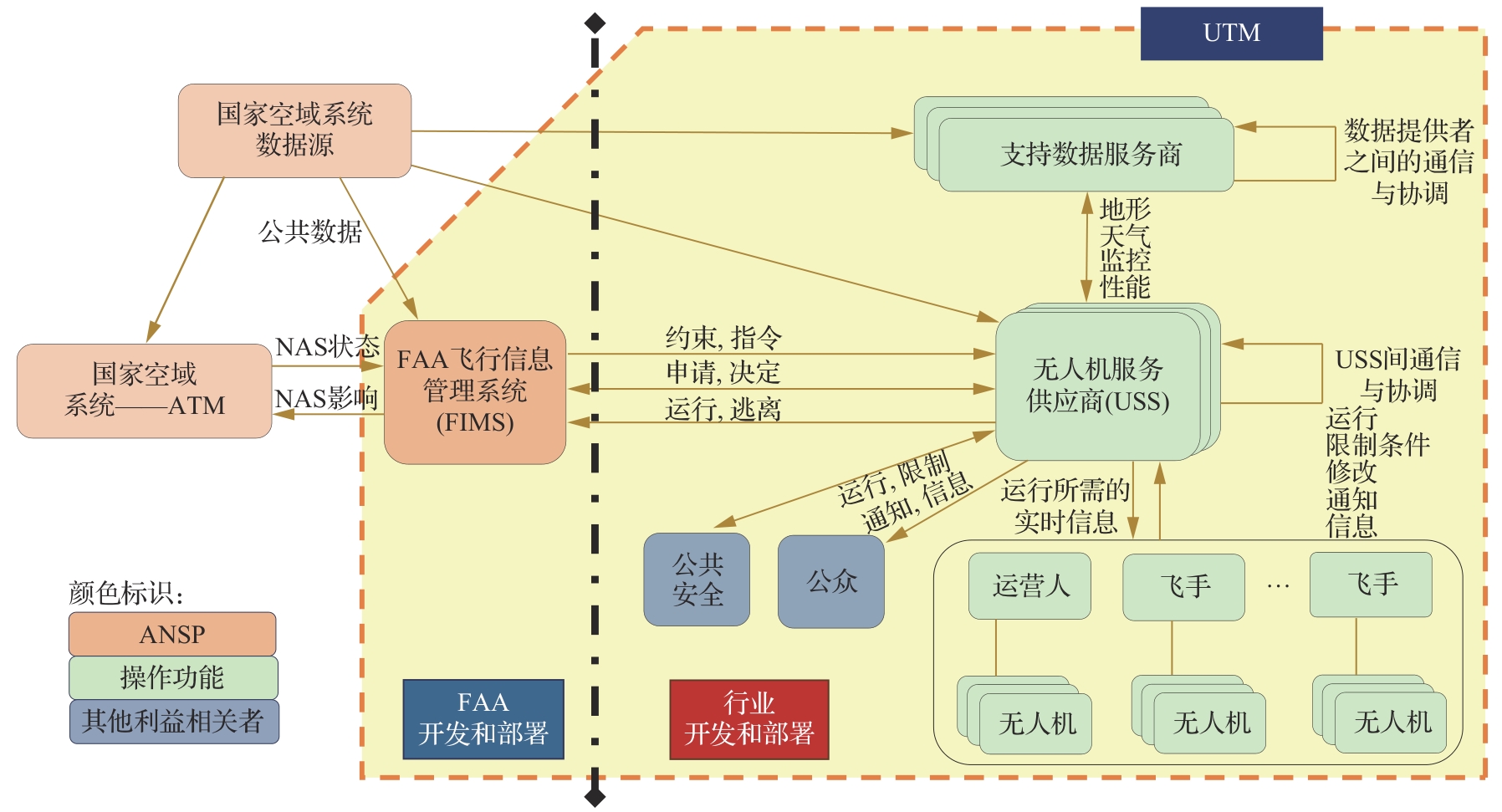

Fig.6
U-Space stakeholders[20]
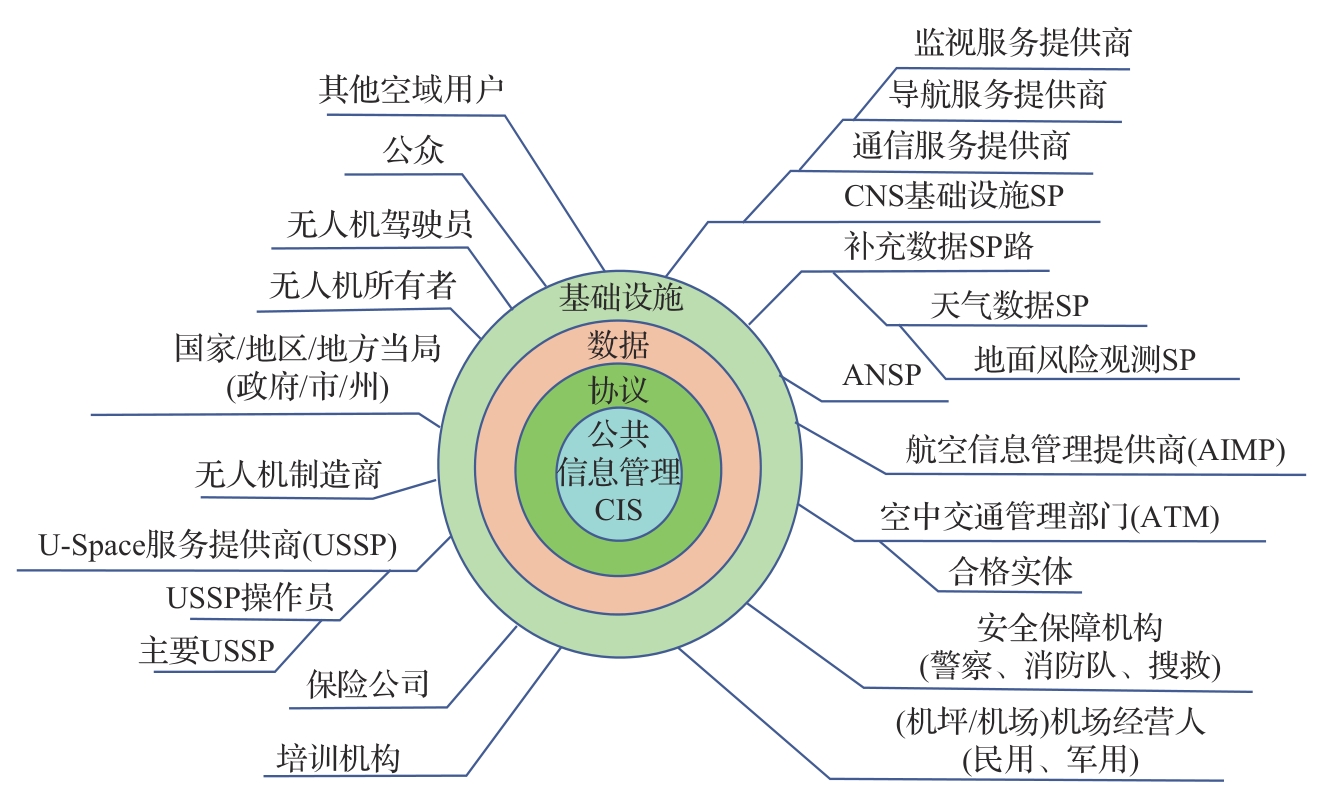
Fig.7
Four levels of U-Space services[20]
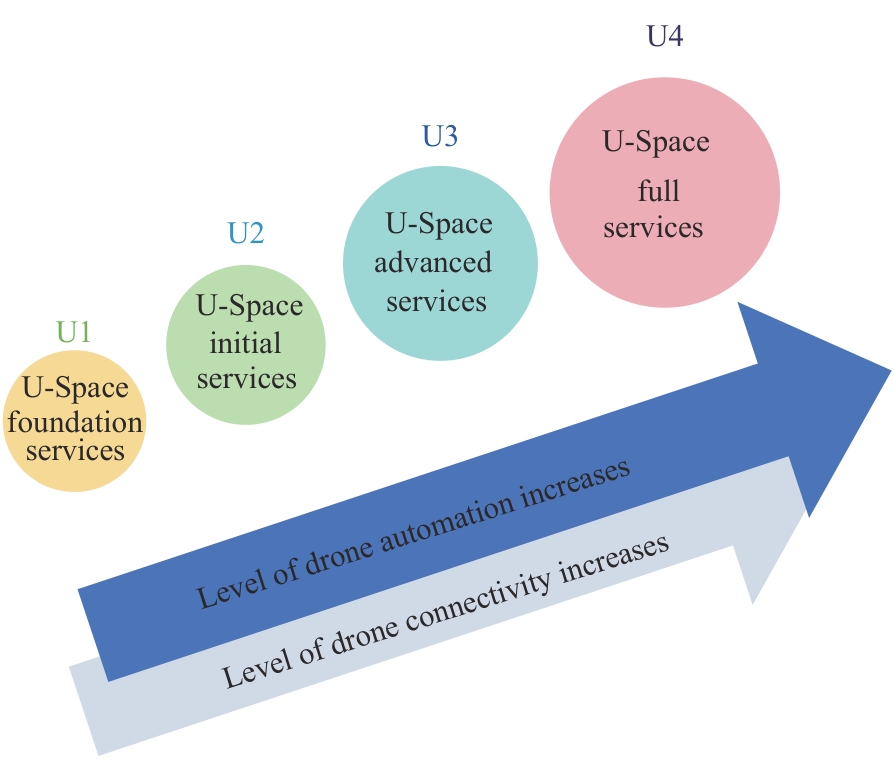
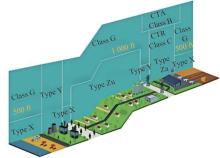
Fig.8
Division of X, Y and Z airspace areas[20]
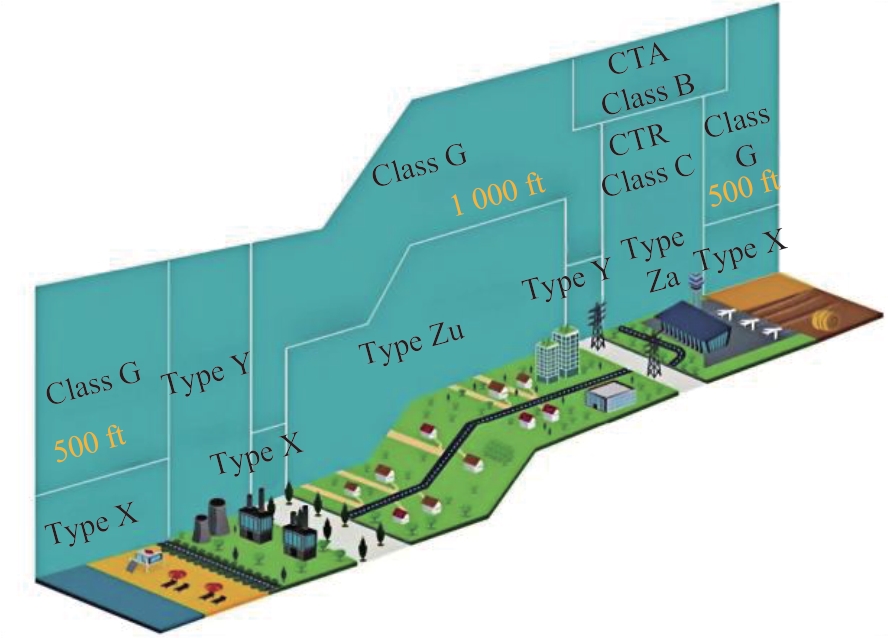
Fig.9
Airspace division in China[21]
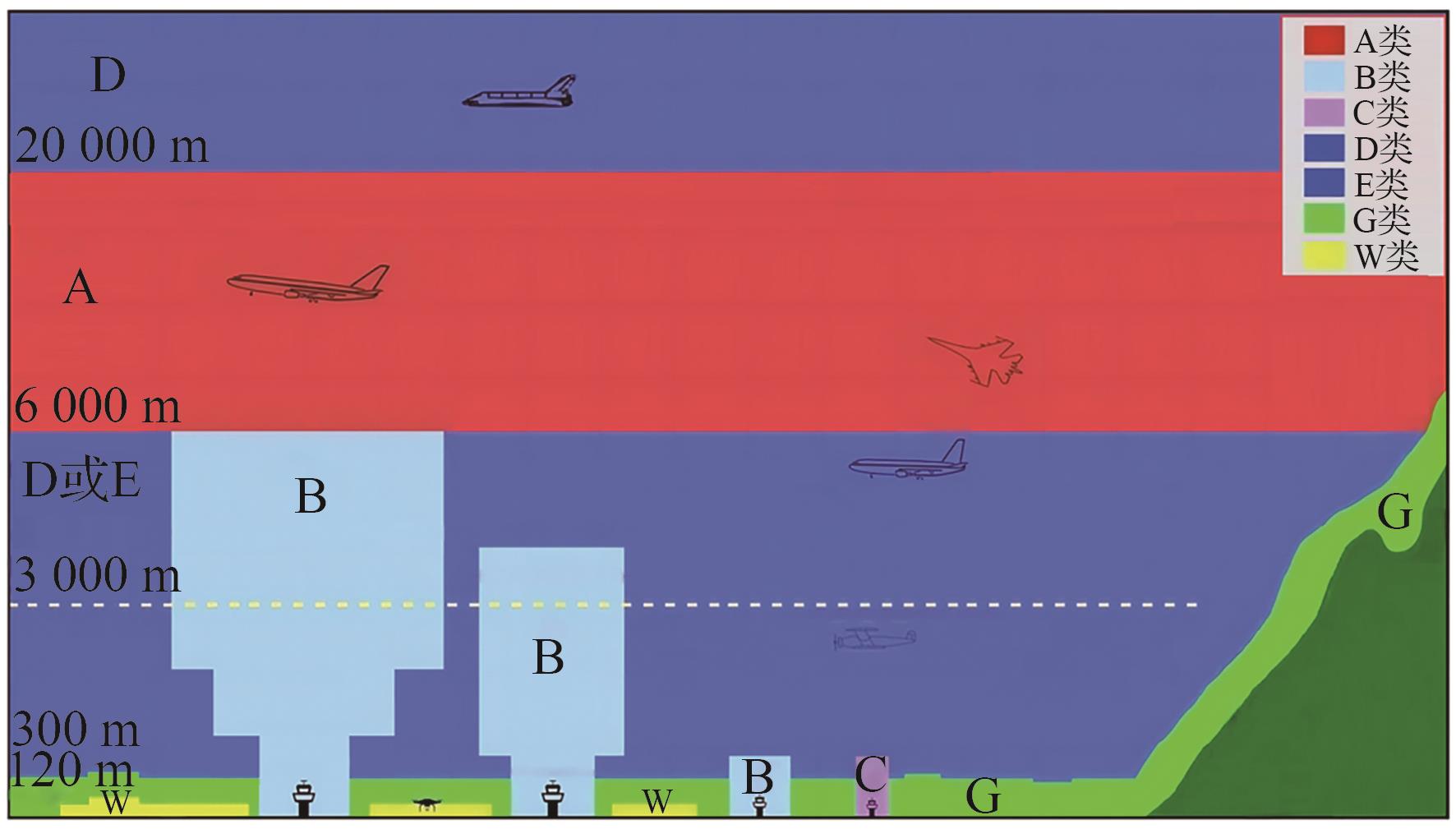

Fig.10
Complete UTM architecture[6]
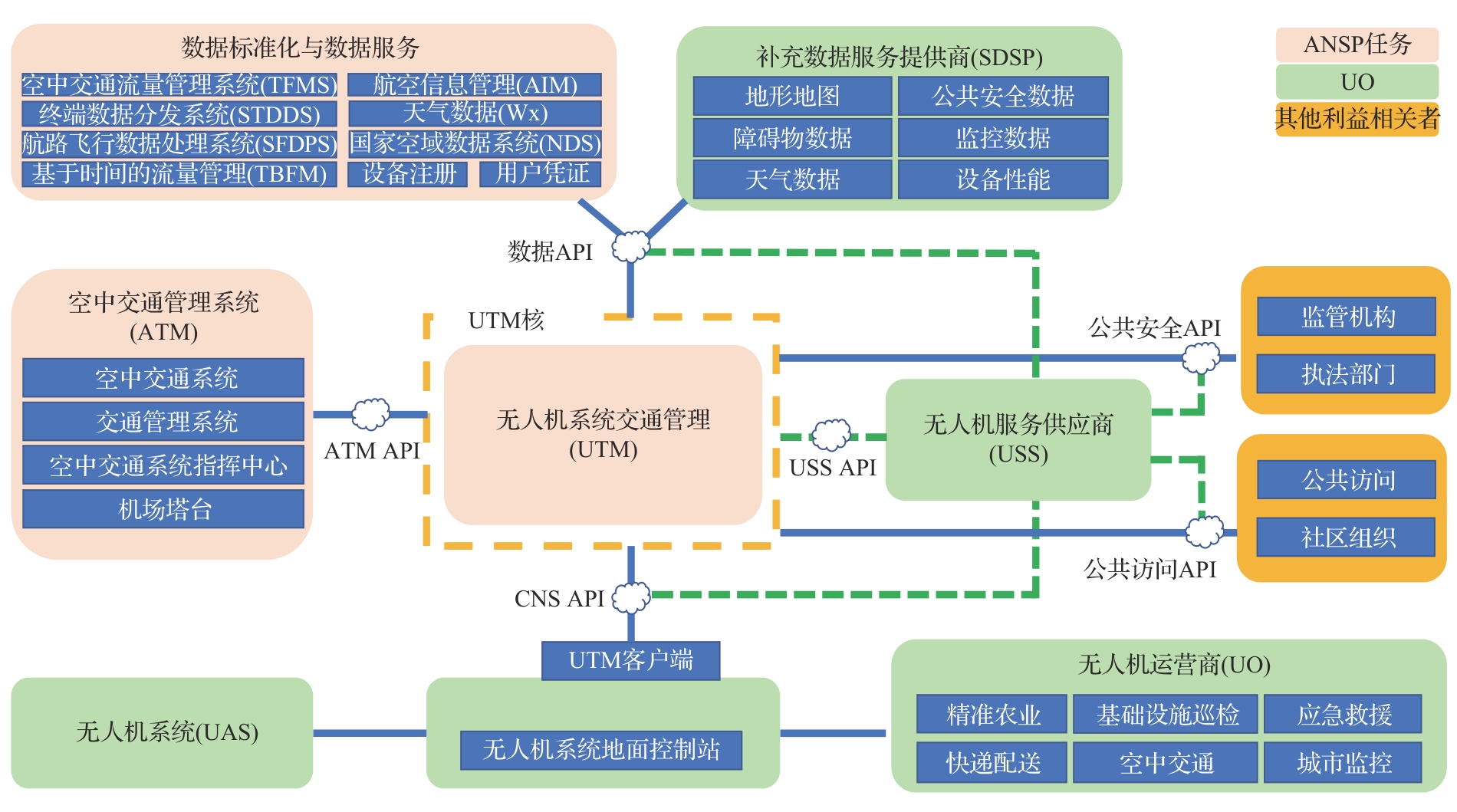
Table 1
Comparison of three information management systems
| 维度 | UTMISS | FIMS | CIS |
|---|---|---|---|
| 架构 | 集中式,一体化 | 分布式,松耦合 | 平台+多服务商、强协调 |
| 角色 | 政府主导的“审批平台” | 政府与企业分工协作接口 | 政府授权,USSP协作网络 |
| 市场化能力 | 弱,缺乏开放服务接口 | 强,鼓励USS创新服务 | 强,鼓励多USSP竞争共存 |
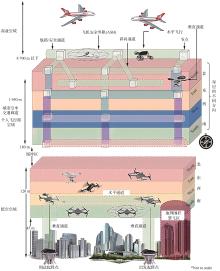
Fig.11
Airspace division diagram of pipelined fixed route[28]
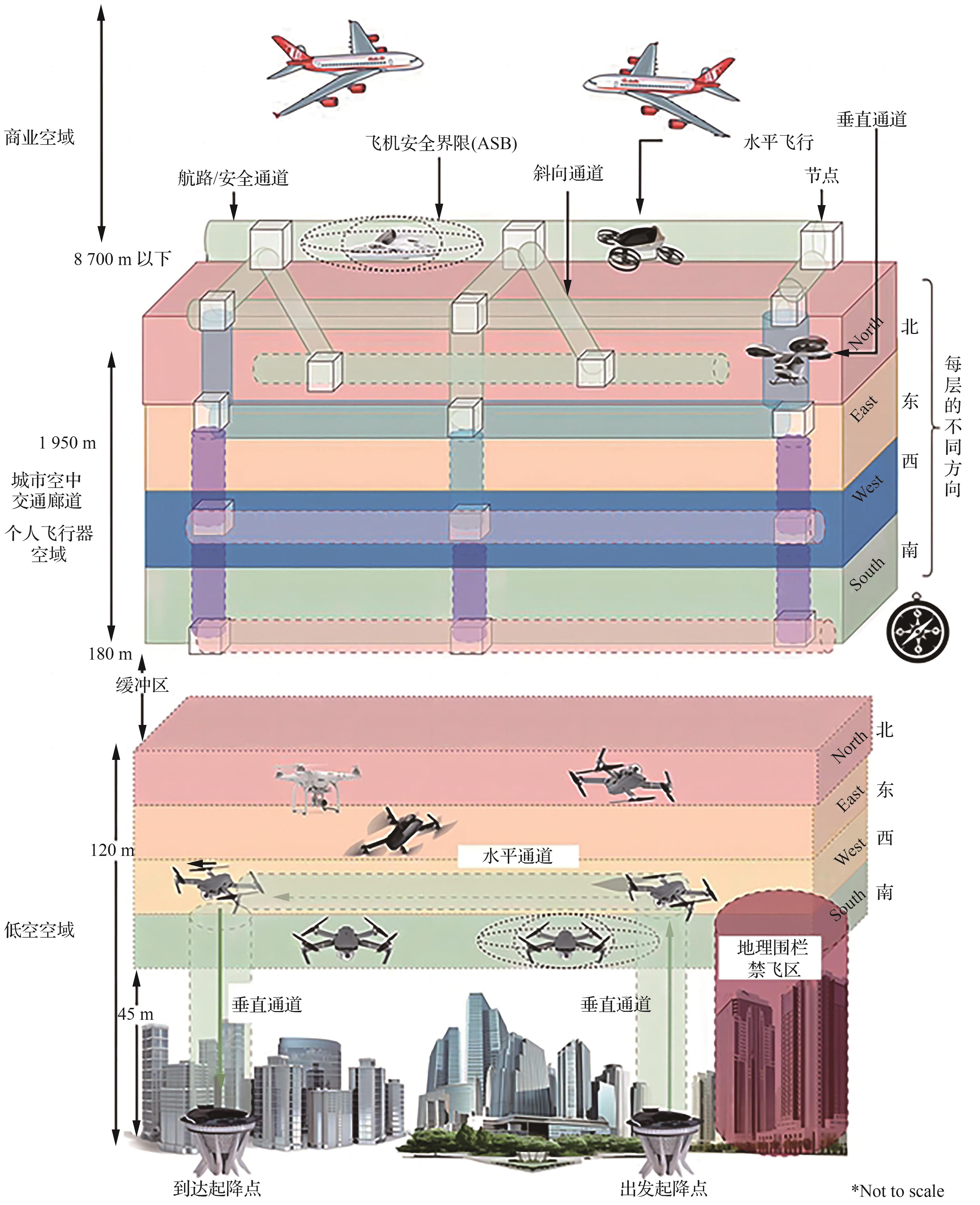
Fig.12
Framework and logical relationships of UTM key technologies
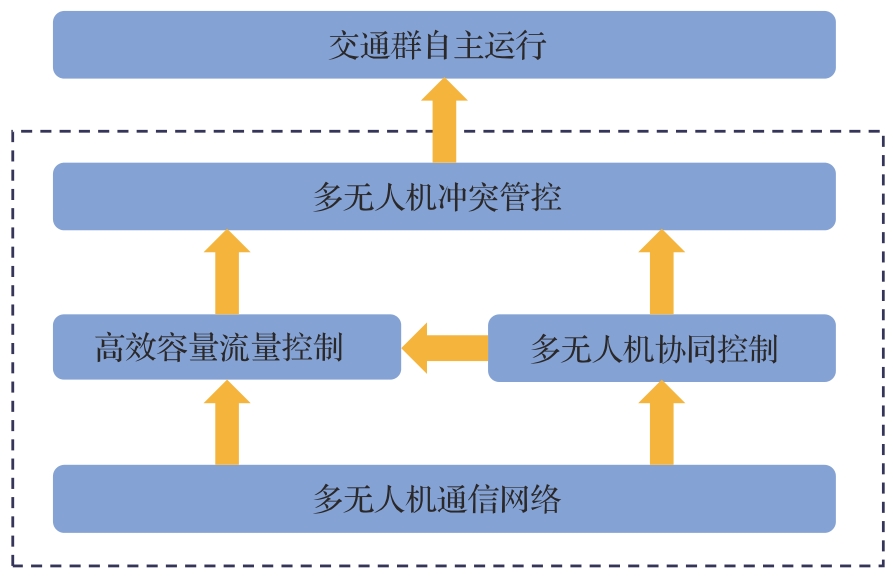
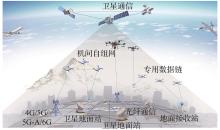
Fig.13
Conceptual diagram of low-altitude communication[35]
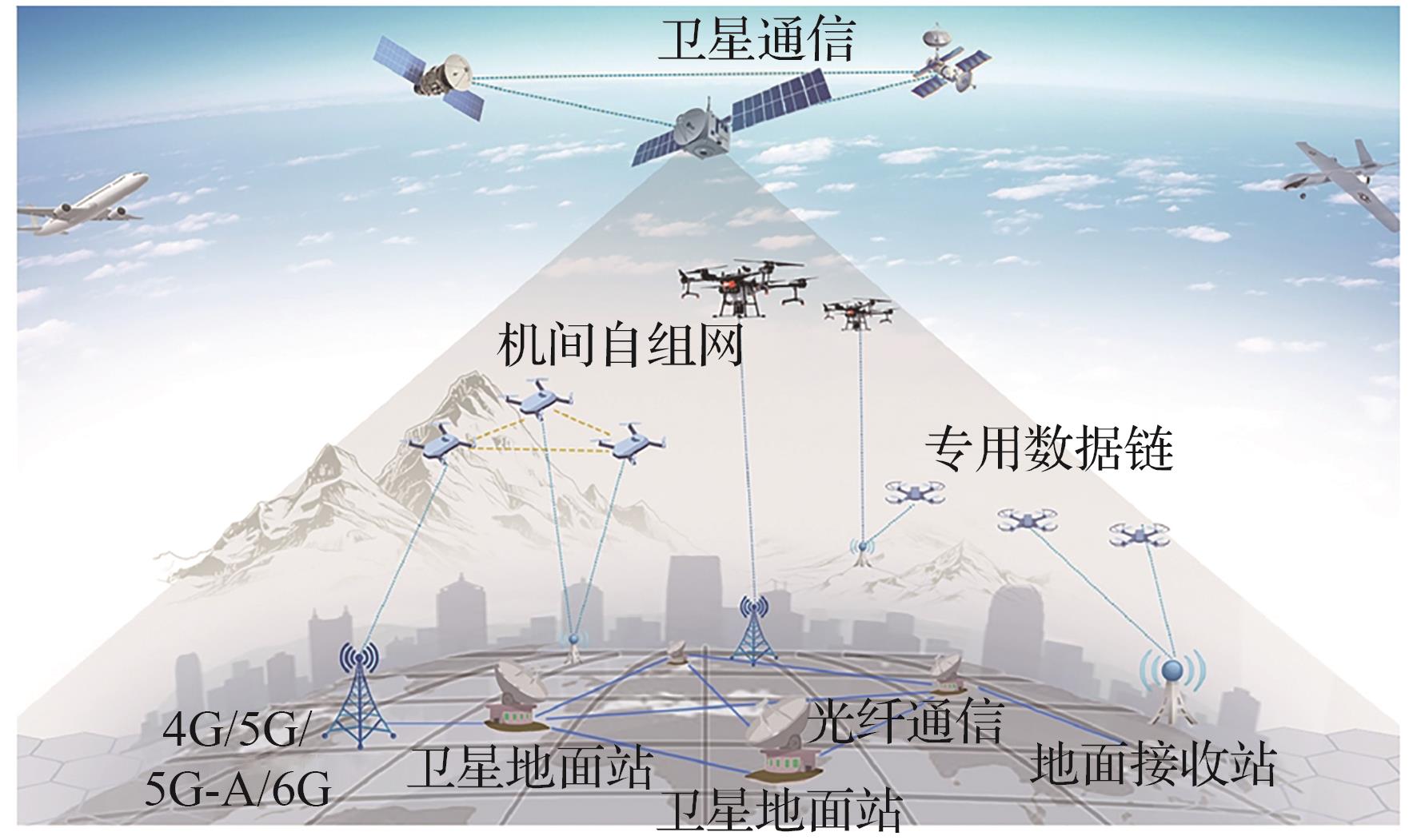
Table 2
Research methods and challenges of UTM generic key technologies
| 关键技术 | 典型研究方法 | 主要挑战 |
|---|---|---|
| 多无人机通信网络 | 5G+北斗卫星通信+视觉+惯导融合 | 低空覆盖不稳定、信号干扰 |
| 多无人机协同控制 | AI驱动的自适应控制 | 分布式决策鲁棒性不足 |
| 高效容量流量管理 | 博弈论优化流量分配 | 突发流量的应对机制缺乏 |
| 冲突检测与规避 | 机器学习辅助避碰 | 大规模协同避障的计算复杂度 |
| 交通群自主运行 | 智能分布式管理 | 群体智能适应性不足 |

Fig.14
Basic composition and logic block diagram of UTM core
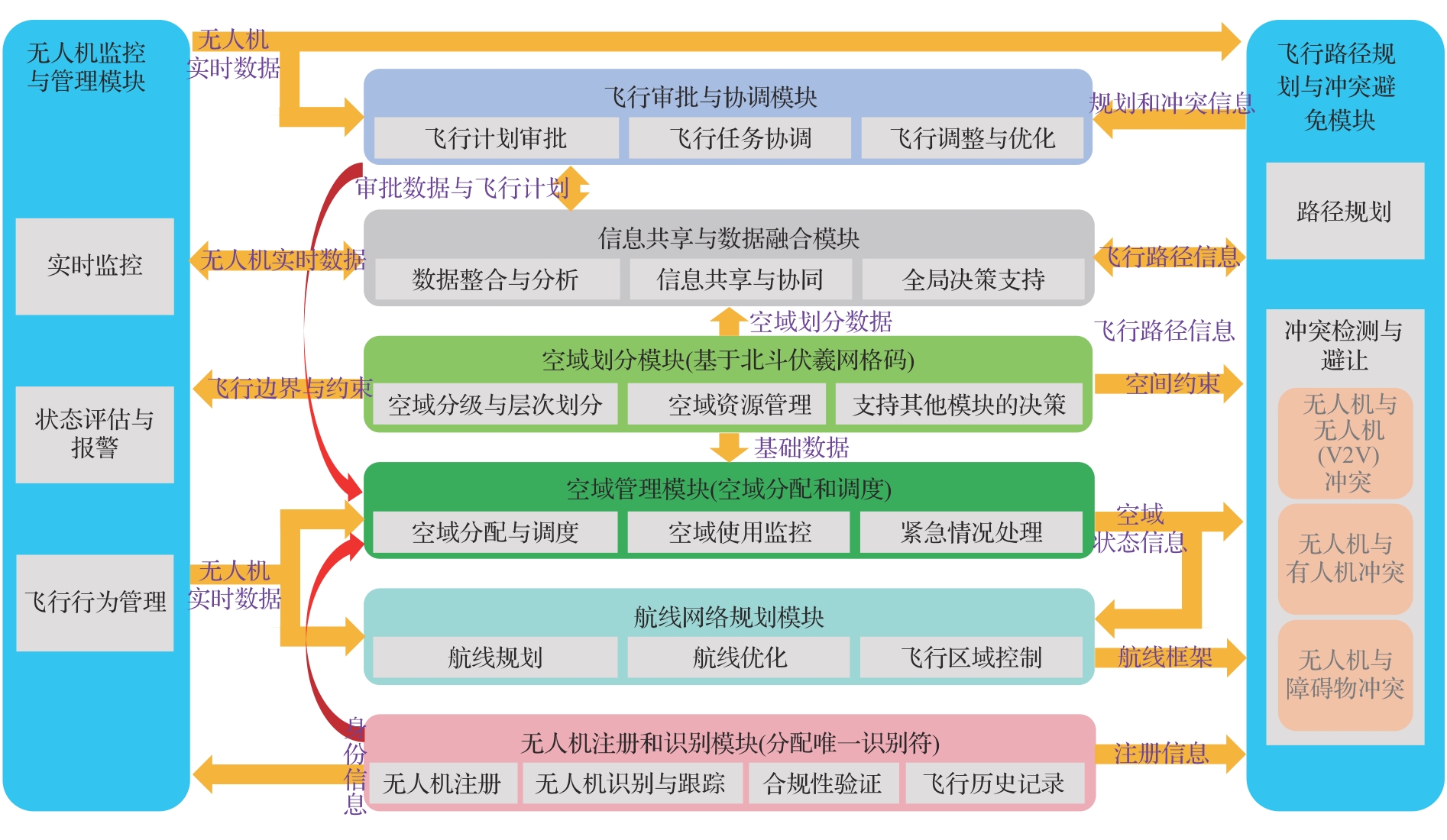
Table 3
NASA’s UTM, EU’s U-Space, and UTM presented in this paper
| 研究方向 | NASA UTM | 欧盟U-Space | 本文所述UTM |
|---|---|---|---|
| 空域划分 | 以G类非管制空域为主,限制无人机飞行高度一般不超过400 ft(约120 m) | 将特定低空划定为专门的U-Space空域,无人机高度限制一般为120 m及以下 | 低空空域按照用途和管理方式分为管制空域,监视空域和报告空域[ |
| 空域管理 | 分布式管理:多主体参与协作,UO通过USS自主协调飞行,FAA提供监管框架 | 混合分布式管理:多家USSP提供服务,通过CIS整合数据,统一协调空域使用 | 从集中管理向分布式管理转化:依托空管委管理低空空域申请、民航局负责飞行监管;深圳等试点城市由地方政府承担管理低空空域任务 |
| 航线规划 | 采用固定航路,部分动态调整 | 高度自动化、数字化管理 | 八卦图立体航线网络 |
| 冲突管控 | 远程识别+V2V避让 | 地理围栏+AI | AI+多源融合感知 |

Fig.15
Low-altitude airspace UTM stratification diagram according to flight altitude
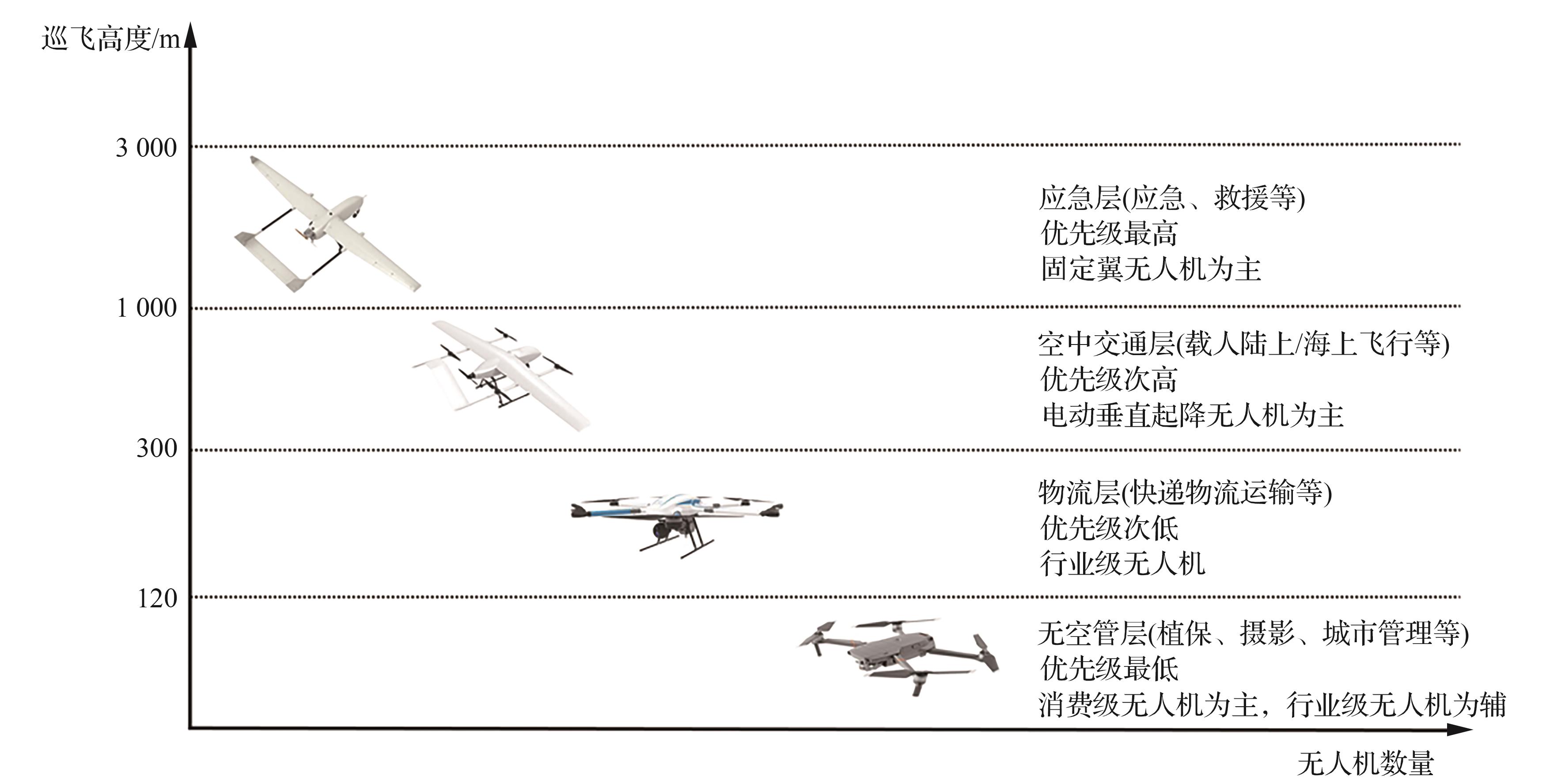

Fig.16
Xinjiang Yili Tex Bagua city-traffic map(source:Tex County Integrated Media Center,https:∥viewinews.gg.comk/20231022A0664K00?no-redirect=l&web channelwap&openAppfalse.date of visit:2024-09-27)

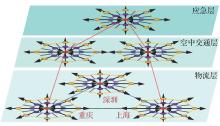
Fig.17
Stereo route network planning diagram in UTM
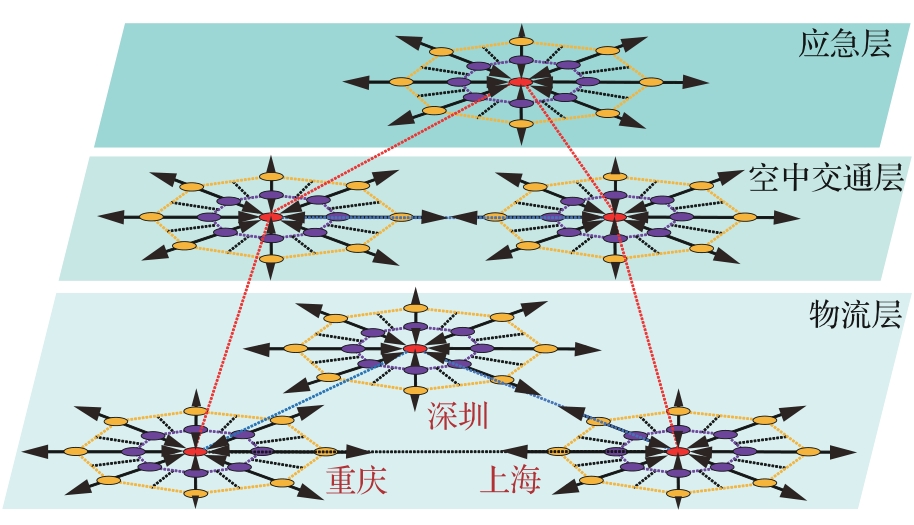
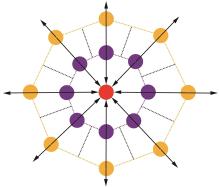
Fig.18
Regional route planning unit in UTM
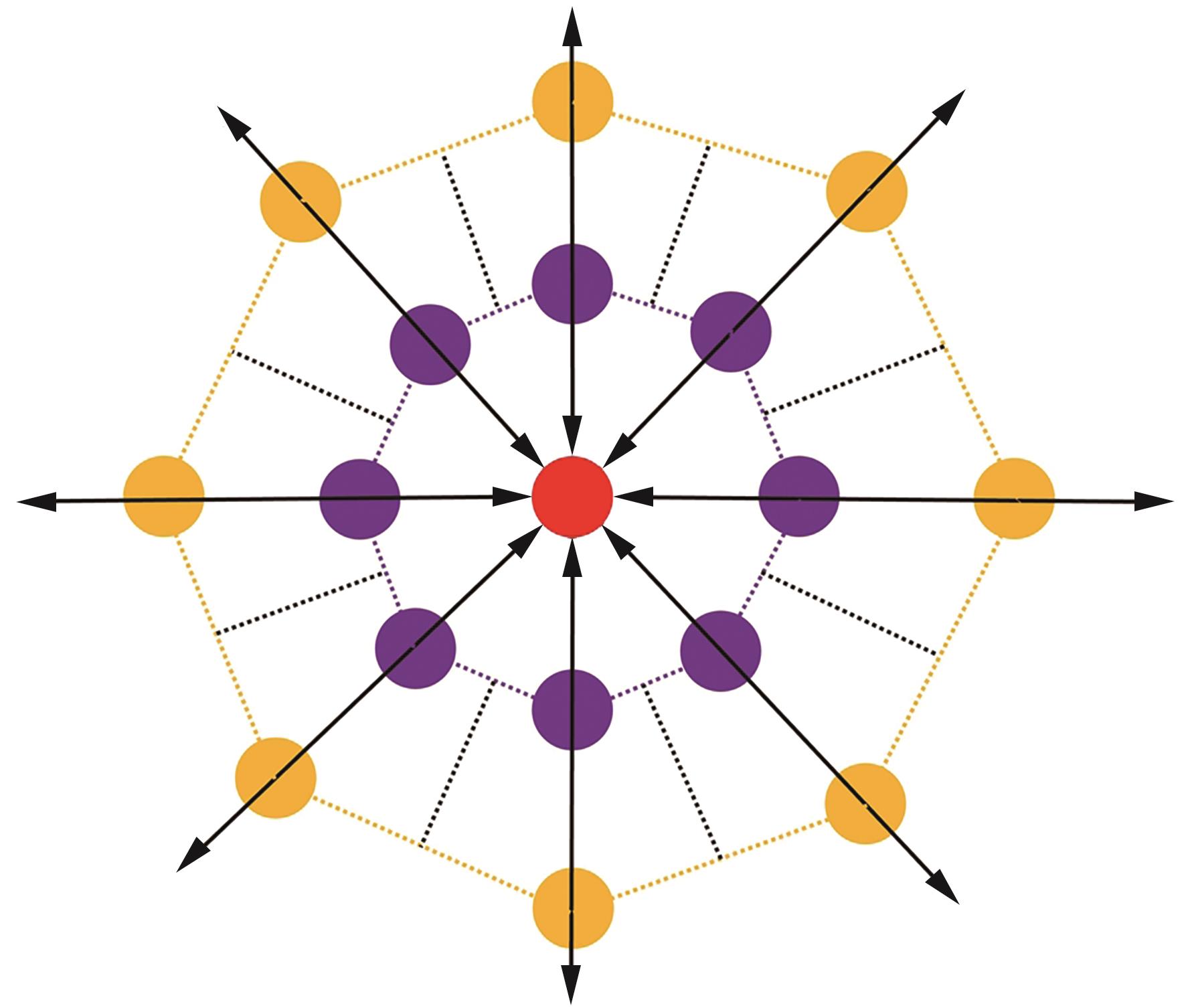
Table 4
Comparative analysis of typical route network
| 网络类型 | 容量利用率 | 冲突消解难度 | 路径 冗余性 | 管理复杂度 | 优势领域/场景 |
|---|---|---|---|---|---|
| 树形结构 | 中 | 较高(热点冲突) | 低 | 中 | 传统民航、简单终端区 |
| 网格结构 | 中高 | 中(交叉点多) | 中 | 中高 | 无人机物流、城市低空 |
| 自由航迹 | 高(理论上) | 高(冲突难控) | 极高 | 极高 | 低密度、超灵活运行场景 |
| 八卦图结构 | 高(分层立体利用) | 低(规则化交汇) | 高 | 中低(规划明确) | 高密度UTM、无人机物流、复杂城市空域 |
| [1] | 深圳市第七届人民代表大会常务委员会 . 深圳经济特区低空经济产业促进条例 [S].深圳: 深圳市第七届人民代表大会常务委员会, 2024. |
| Standing Committee of the Seventh Shenzhen Municipal People’s Congress. Regulations on the promotion of low-altitude economic industry in Shenzhen special economic zone [S]. Shenzhen: Standing Committee of the Seventh Shenzhen Municipal People’s Congress, 2024 (in Chinese). | |
| [2] | NASA. Unmanned aircraft systems traffic management research transition team plan[R]. Washington, D.C.: NASA, 2019. |
| [3] | FAA. Unmanned aircraft systems traffic management concept of operations V2.0[R]. Washington, D. C.: FAA, 2020. |
| [4] | JOHNSON M, JUNG J, RIOS J, et al. Flight test evaluation of an unmanned aircraft system traffic management (UTM) concept for multiple beyond-visual-line-of-sight operations[C]∥Proceedings of 12th USA/Europe Air Traffic Management Research and Development Seminar. 2017. |
| [5] | FAA. Airspace guidance for small UAS operators[R]. Washington, D.C.: FAA, 2018. |
| [6] | KOPARDEKAR P, RIOS J, PREVOT T, et al. Unmanned aircraft system traffic management (UTM) concept of operations[C]∥AIAA Aviation Forum and Exposition. Reston: AIAA, 2016. |
| [7] | PREVOT T, HOMOLA J, MERCER J. From rural to urban environments: Human/systems simulation research for low altitude UAS traffic management (UTM)[C]∥16th AIAA Aviation Technology, Integration, and Operations Conference. Reston: AIAA, 2016. |
| [8] | AWEISS A S, OWENS B D, RIOS J, et al. Unmanned aircraft systems (UAS) traffic management (UTM) national campaign Ⅱ[C]∥2018 AIAA Information Systems-AIAA Infotech @ Aerospace. Reston:AIAA, 2018. |
| [9] | MARCUS J. Unmanned aircraft systems traffic management(UTM): Conflict mitigation approach[C]∥Mitigation by Technology Workshop. Washington, D.C.: NASA, 2018. |
| [10] | RIOS J, SMITH I, VENKATESAN P, et al. UTM UAS serivce supplier development: Sprint 1 toward technical capability level 4[C]∥Mitigation by Technology Workshop. Washington, D.C.: NASA, 2018. |
| [11] | UAS traffic management (UTM) Research transition team(RTT) plan[EB/OL]. (2017-1-31) [2020-09-22]. . |
| [12] | FAA. UAS traffic management (UTM) pilot program (UPP)[EB/OL]. (2019-11-14)[2023-09-22]. . |
| [13] | FAA. FAA ATO LAANC concept of operations v2.1[EB/OL].(2020-03-20)[2023-09-22]. . |
| [14] | THIPPHAVONG D P, APAZA R, BARMORE B, et al. Urban air mobility airspace integration concepts and considerations[C]∥2018 Aviation Technology, Integration, and Operations Conference. Reston: AIAA, 2018. |
| [15] | 廖小罕, 屈文秋, 徐晨晨, 等. 城市空中交通及其新型基础设施低空公共航路研究综述[J]. 航空学报, 2023, 44(24): 028521. |
| LIAO X H, QU W Q, XU C C, et al. A review of urban air mobility and its new infrastructure low-altitude public routes[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(24): 028521 (in Chinese). | |
| [16] | 李诚龙, 屈文秋, 李彦冬, 等. 面向eVTOL航空器的城市空中运输交通管理综述[J]. 交通运输工程学报, 2020, 20(4): 35-54. |
| LI C L, QU W Q, LI Y D, et al. Overview of traffic management of urban air mobility (UAM) with eVTOL aircraft[J]. Journal of Traffic and Transportation Engineering, 2020, 20(4): 35-54 (in Chinese). | |
| [17] | NASA. UTM: Air traffic management for low-altitude drones[EB/OL]. (2015-10)[2019-04-12]. . |
| [18] | SESAR. U-space blueprint[EB/OL]. (2017-06-09)[2019-04-12]. . |
| [19] | BARRADO C, BOYERO M, BRUCCULERI L, et al. U-space concept of operations: A key enabler for opening airspace to emerging low-altitude operations[J]. Aerospace, 2020, 7(3): 24. |
| [20] | Eurocontrol. U-Space concept of operation(Fourth Edition)[EB/OL]. (2019-10-25)[2023-07-20]. . |
| [21] | 中国民用航空局 . 国家空域基础分类方法 [S].北京:中国民用航空局, 2023. |
| Civil Aviation Administration of China. National airspace fundamental classification method [S]. Beijing: Civil Aviation Administration of China, 2023 (in Chinese). | |
| [22] | CHO J, YOON Y. How to assess the capacity of urban airspace: A topological approach using keep-in and keep-out geofence[J]. Transportation Research Part C: Emerging Technologies, 2018, 92: 137-149. |
| [23] | LABIB N S, DANOY G, MUSIAL J, et al. A multilayer low-altitude airspace model for UAV traffic management[C]∥Proceedings of the 9th ACM Symposium on Design and Analysis of Intelligent Vehicular Networks and Applications. New York: ACM, 2019. |
| [24] | XU C C, LIAO X H, TAN J M, et al. Recent research progress of unmanned aerial vehicle regulation policies and technologies in urban low altitude[J]. IEEE Access, 2020, 8: 74175-74194. |
| [25] | BAUM S M. Unmanned aircraft systems traffic management(1st Edition)[M]. Boca Raton. CRC Press. 2021. |
| [26] | SHRESTHA R, BAJRACHARYA R, KIM S. 6G enabled unmanned aerial vehicle traffic management: A perspective[J]. IEEE Access, 2021, 9: 91119-91136. |
| [27] | LI A, HANSEN M, ZOU B. Traffic management and resource allocation for UAV-based parcel delivery in low-altitude urban space[J]. Transportation Research Part C: Emerging Technologies, 2022, 143: 103808. |
| [28] | SHRESTHA R, OH I, KIM S. A survey on operation concept, advancements, and challenging issues of urban air traffic management[J]. Frontiers in Future Transportation, 2021, 2: 626935. |
| [29] | 金安, 程承旗. 基于全球剖分网格的空间数据编码方法[J]. 测绘科学技术学报, 2013, 30(3): 284-287. |
| JIN A, CHENG C Q. Spatial data coding method based on global subdivision grid[J]. Journal of Geomatics Science and Technology, 2013, 30(3): 284-287 (in Chinese). | |
| [30] | 程承旗, 陈东, 童晓冲. 基于地球剖分网格的无人机数据组织模型初探[J]. 地理信息世界, 2015, 22(4): 46-50. |
| CHENG C Q, CHEN D, TONG X C. The UAV data organization model based on global subdivision grid[J]. Geomatics World, 2015, 22(4): 46-50 (in Chinese). | |
| [31] | 程承旗. 建立健全国家北斗标准促进低空立体交通红绿灯系统建设[J]. 新经济导刊, 2024(7): 31-35. |
| CHENG C Q. Establish and improve national BeiDou standard and promote the construction of the low-altitude 3D traffic light system[J]. New Economy Weekly, 2024(7): 31-35 (in Chinese). | |
| [32] | JAVAID S, SAEED N, QADIR Z, et al. Communication and control in collaborative UAVs: Recent advances and future trends[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(6): 5719-5739. |
| [33] | WU G X, LIU Q, XU J F, et al. Energy efficient task caching and offloading in UAV-enabled crowd management[J]. IEEE Sensors Journal, 2022, 22(18): 17565-17572. |
| [34] | TUN Y K, PARK Y M, TRAN N H, et al. Energy-efficient resource management in UAV-assisted mobile edge computing[J]. IEEE Communications Letters, 2021, 25(1): 249-253. |
| [35] | 中国电子科技集团有限公司 . 低空航行系统 [S].北京: 中国电子科技集团有限公司,2024. |
| China Electronics Technology Group Corporation. Low-altitude navigation system [S]. Beijing: China Electronics Technology Group Corporation, 2024 (in Chinese). | |
| [36] | WU J H, YU Y Z, MA J, et al. Autonomous cooperative flocking for heterogeneous unmanned aerial vehicle group[J]. IEEE Transactions on Vehicular Technology, 2021, 70(12): 12477-12490. |
| [37] | POPESCU D, STOICAN F, STAMATESCU G, et al. A survey of collaborative UAV-WSN systems for efficient monitoring[J]. Sensors, 2019, 19(21): 4690. |
| [38] | CHEN J C, LI T Y, ZHANG Y, et al. Global-and-local attention-based reinforcement learning for cooperative behaviour control of multiple UAVs[J]. IEEE Transactions on Vehicular Technology, 2024, 73(3): 4194-4206. |
| [39] | JIA Y N, LI Q, ZHANG W C. A distributed cooperative approach for unmanned aerial vehicle flocking[J]. Chaos, 2019, 29(4): 043118. |
| [40] | YANG H L, XIE X Z. Energy-efficient joint scheduling and resource management for UAV-enabled multicell networks[J]. IEEE Systems Journal, 2020, 14(1): 363-374. |
| [41] | PATRINOPOULOU N, DARAMOUSKAS I, BADEA C A, et al. Dynamic capacity management for air traffic operations in high density constrained urban airspace[J]. Drones, 2023, 7(6): 395. |
| [42] | WAN Y, TANG J, LAO S Y. Distributed conflict-detection and resolution algorithm for UAV swarms based on consensus algorithm and strategy coordination[J]. IEEE Access, 2019, 7: 100552-100566. |
| [43] | FAN L J, TANG J, LING Y X, et al. Novel conflict resolution model for multi-UAV based on CPN and 4D trajectories[J]. Asian Journal of Control, 2016, 18(2): 721-732. |
| [44] | LI Y M, DU W B, YANG P, et al. A satisficing conflict resolution approach for multiple UAVs[J]. IEEE Internet of Things Journal, 2019, 6(2): 1866-1878. |
| [45] | ALHARBI A, POUJADE A, MALANDRAKIS K, et al. Rule-based conflict management for unmanned traffic management scenarios[C]∥2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC). Piscataway: IEEE Press, 2020. |
| [46] | YANG J, YIN D, NIU Y F, et al. Cooperative conflict detection and resolution of civil unmanned aerial vehicles in metropolis[J]. Advances in Mechanical Engineering, 2016, 8(6): 1687814016651195. |
| [47] | PEREZ-LEON H, ACEVEDO J J, MAZA I, et al. Integration of a 4D-trajectory follower to improve multi-UAV conflict management within the U-space context[J]. Journal of Intelligent & Robotic Systems, 2021, 102(3): 62. |
| [48] | ACEVEDO J J, CAPITAN C, CAPITIIN J, et al. A geometrical approach based on 4D grids for conflict management of multiple UAVs operating in U-space[C]∥2020 International Conference on Unmanned Aircraft Systems (ICUAS). Piscataway: IEEE Press, 2020. |
| [49] | TANG X, JI X, LI T. Key technology in multi-UAV conflict detection and resolution strategy[J]. Transactions of Nanjing University of Aeronautics and Astronautics. 2020, 37(2): 175-186. |
| [50] | RADANOVIC M, OMERI M, PIERA M A. Test analysis of a scalable UAV conflict management framework[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019, 233(16): 6076-6088. |
| [51] | 李安醍, 李诚龙, 武丁杰, 等. 结合跳点引导的无人机随机搜索避撞决策方法[J]. 航空学报, 2020, 41(8): 323726. |
| LI A T, LI C L, WU D J, et al. Collision avoidance decision method for UAVs in random search combined with jump point guidance[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(8): 323726 (in Chinese). | |
| [52] | LABIB N S, DANOY G, MUSIAL J, et al. Internet of unmanned aerial vehicles-a multilayer low-altitude airspace model for distributed UAV traffic management[J]. Sensors, 2019, 19(21): 4779. |
| [53] | HUANG H L, SAVKIN A V, HUANG C. Decentralized autonomous navigation of a UAV network for road traffic monitoring[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(4): 2558-2564. |
| [54] | RUMBA R, NIKITENKO A. The wild west of drones: A review on autonomous-UAV traffic-management[C]∥2020 International Conference on Unmanned Aircraft Systems (ICUAS). Piscataway: IEEE Press, 2020. |
| [55] | 国务院, 中央军委. 《关于深化我国低空空域管理改革的意见》出台[J]. 空运商务, 2010(21): 25. |
| Council State, Central Military Commission.“Opinions on deepening the reform of low-altitude airspace management in China” was issued[J]. Air Transport & Business, 2010(21): 25 (in Chinese). | |
| [56] | 张洪海, 李姗, 夷珈, 等. 城市低空航路规划研究综述[J]. 南京航空航天大学学报, 2021, 53(6): 827-838. |
| ZHANG H H, LI S, YI J, et al. Review on urban low-altitude air route planning[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2021, 53(6): 827-838 (in Chinese). | |
| [57] | JARDIN M. Air traffic conflict models[C]∥AIAA 4th Aviation Technology, Integration and Operations (ATIO) Forum. Reston: AIAA, 2004. |
| [58] | BADEA C, MORFIN V A, RIBEIRO M J, et al. Limitations of conflict prevention and resolution in constrained very low-level urban airspace[C]∥11th SESAR Innovation Days, 2021. |
| [59] | MUNA S I, MUKHERJEE S, NAMUDURI K, et al. Air corridors: concept, design, simulation, and rules of engagement[J]. Sensors, 2021, 21: 7536-7553. |
| [60] | LI Z L, LI S, LU J, et al. Air route network planning method of urban low-altitude logistics UAV with double-layer structure[J]. Drones, 2025, 9(3): 193. |
| [61] | ALLOUCH A, CHEIKHROUHOU O, KOUBÂA A, et al. UTM-chain: Blockchain-based secure unmanned traffic management for Internet of drones[J]. Sensors, 2021, 21(9): 3049. |
| [1] | Fanteng MENG, Yong QIN, Jing CUI, Yunpeng WU, Zicheng ZHANG, Shaowei WEI. Unknown risk detection in external environment of railroad using UAV images [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531262-531262. |
| [2] | Yongguang JIN, Fangwei YE, Qihui WU. Location privacy protection mechanisms for UAVs with Remote ID [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531341-531341. |
| [3] | Ruokun QU, Zhiyuan WANG, Yelu LIU, Chenglong LI, Bo JIANG. UAV visual positioning technology for urban air mobility [J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531168-531168. |
| [4] | SUI Dong, XING Yaping, TU Shichen. Repair optimization strategy for air route networks under severe weather conditions [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2021, 42(2): 324300-324300. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341