Acta Aeronautica et Astronautica Sinica ›› 2025, Vol. 46 ›› Issue (10): 331227.doi: 10.7527/S1000-6893.2024.31227
• Electronics and Electrical Engineering and Control • Previous Articles
Huimin WU, Zhen HE( ), Yuxiao PENG
), Yuxiao PENG
Received:2024-09-19
Revised:2024-11-08
Accepted:2024-12-18
Online:2024-12-31
Published:2024-12-30
Contact:
Zhen HE
E-mail:hezhen@nuaa.edu.cn
Supported by:CLC Number:
Huimin WU, Zhen HE, Yuxiao PENG. Iterative learning trajectory control method based on reachable ets for perching maneuvers[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(10): 331227.
Fig.1
Fixed-wing UAV perching maneuver process
Table 1
Geometric parameters of fixed-wing UAV[28]
| 参数 | 数值 |
|---|---|
| 无人机质量 | |
| 气动弦长 | |
| 翼展 | |
| 俯仰转动惯量 | |
| 机翼面积 | |
| 升降舵面积 | |
| 升降舵空气动力中心到无人机质心的距离 | |
| 飞行器重心位置 | |
| 机翼的1/4弦长位置 | |
| 升降舵的1/4弦长位置 | |
| 重力加速度 | |
| 空气密度 |
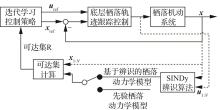
Fig.2
Trajectory tracking control framework based on reachable sets and iterative learning
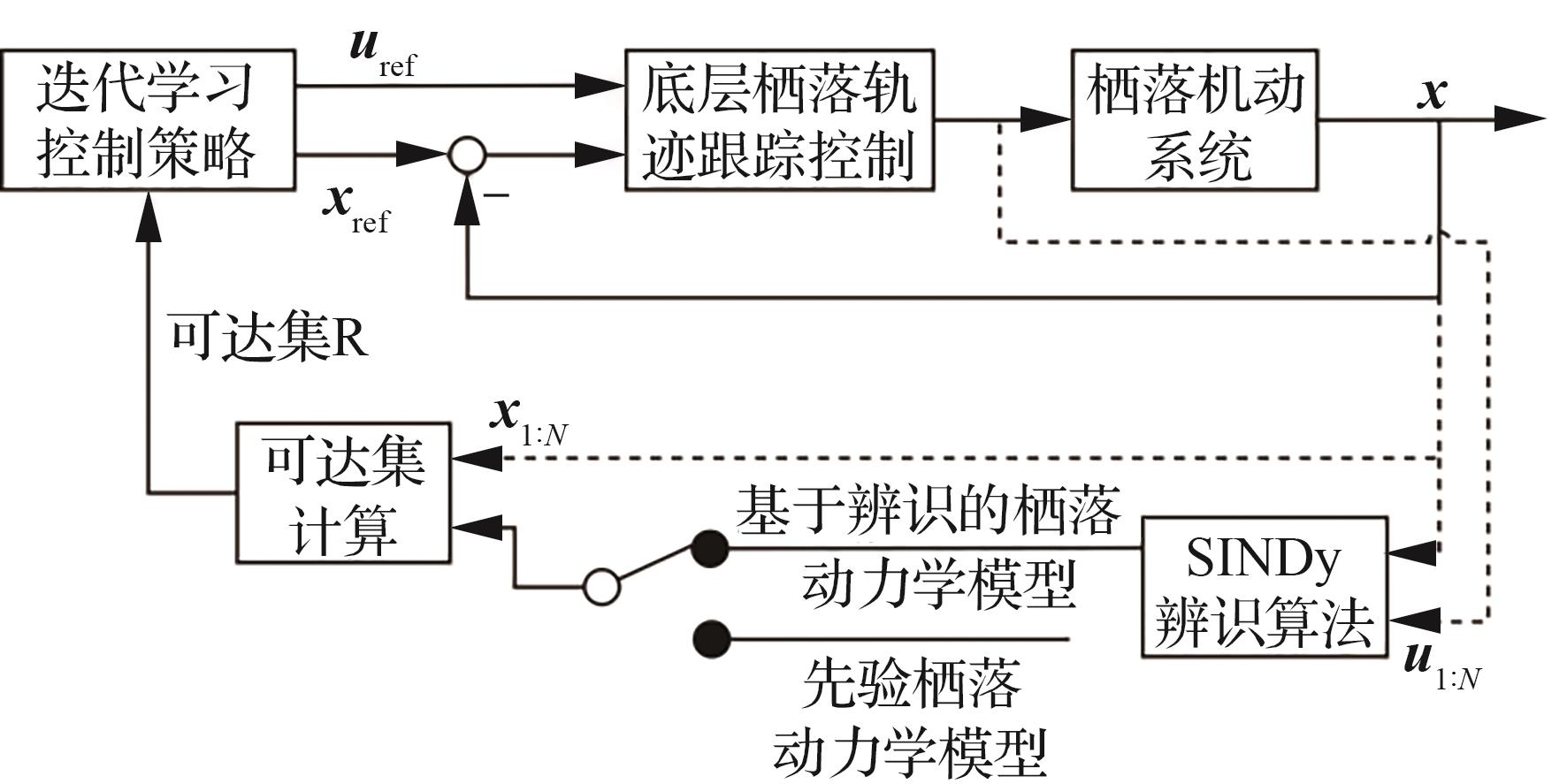
Table 2
Safety constraints during perching process
| 状态变量 | 下限值 | 上限值 |
|---|---|---|
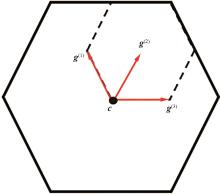
Fig.3
Zonotope schematic
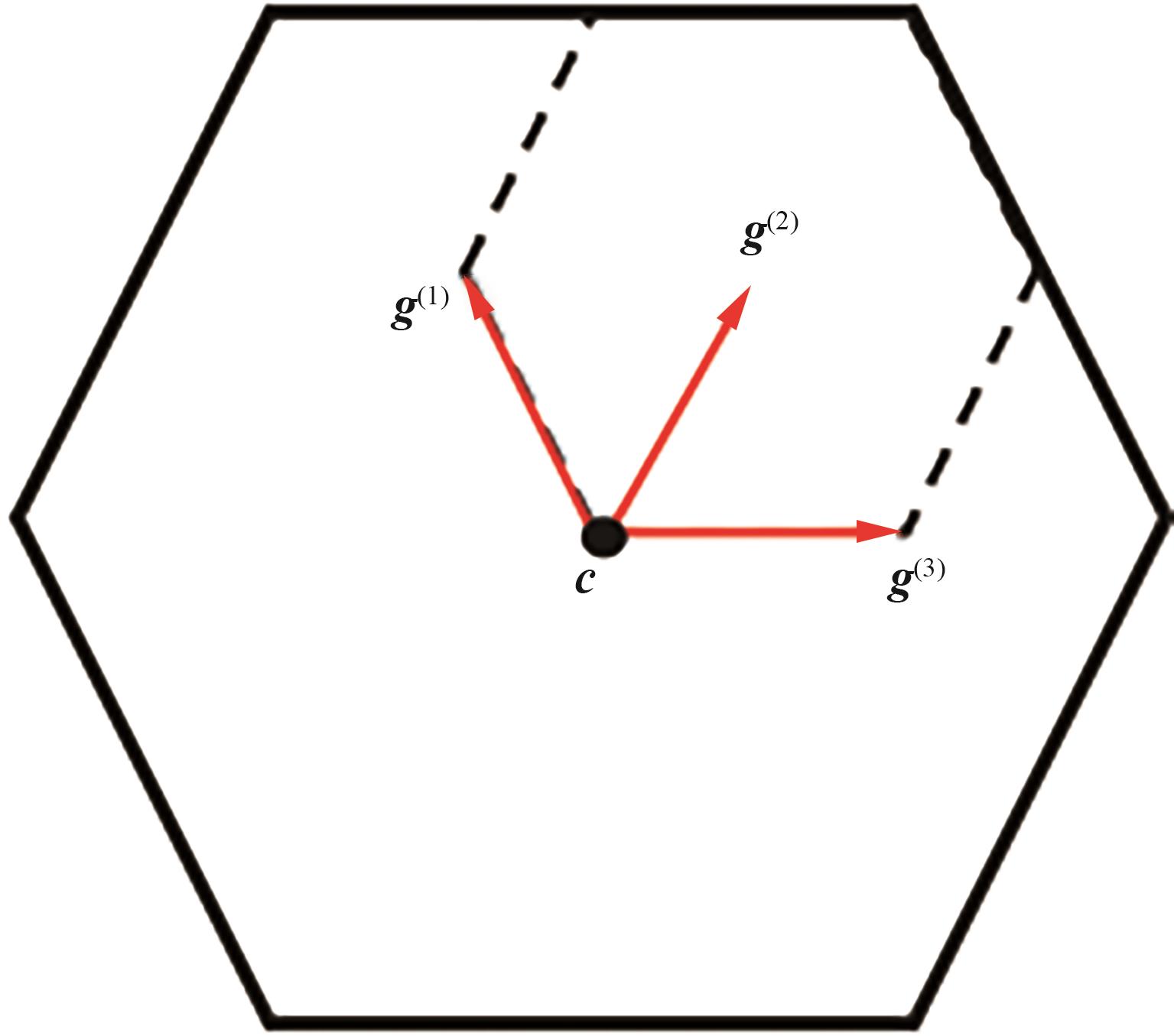

Fig.4
Process of adaptive grid subdivision
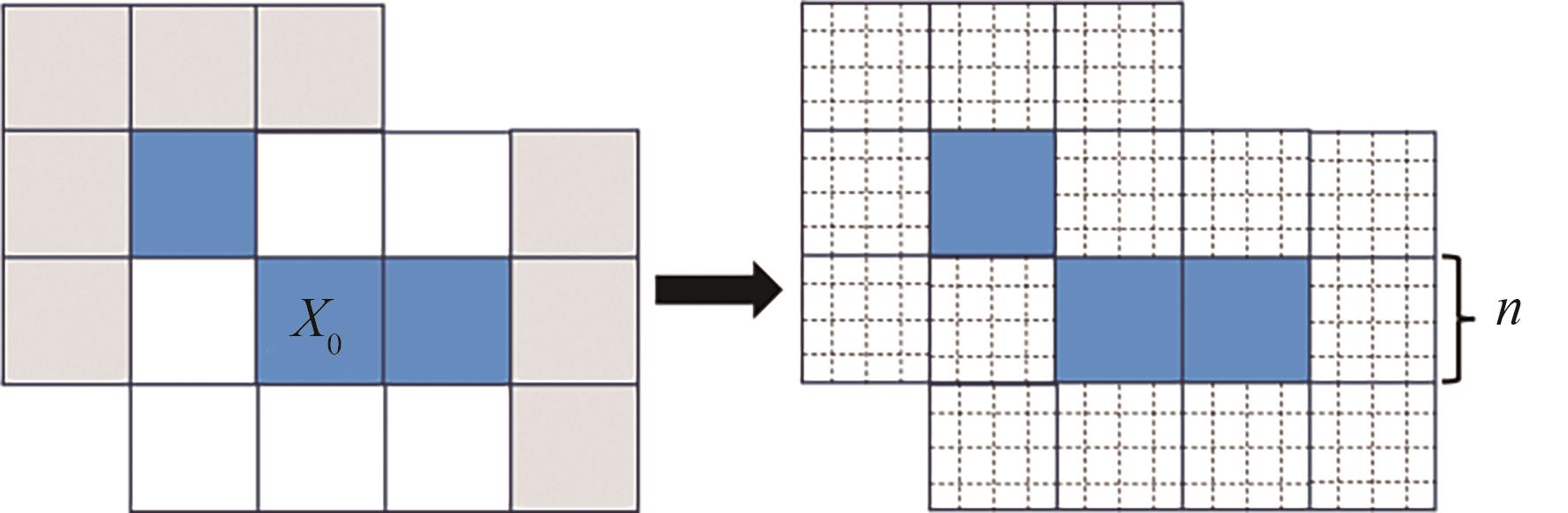
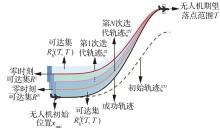
Fig.5
Iterative process based on reachable sets
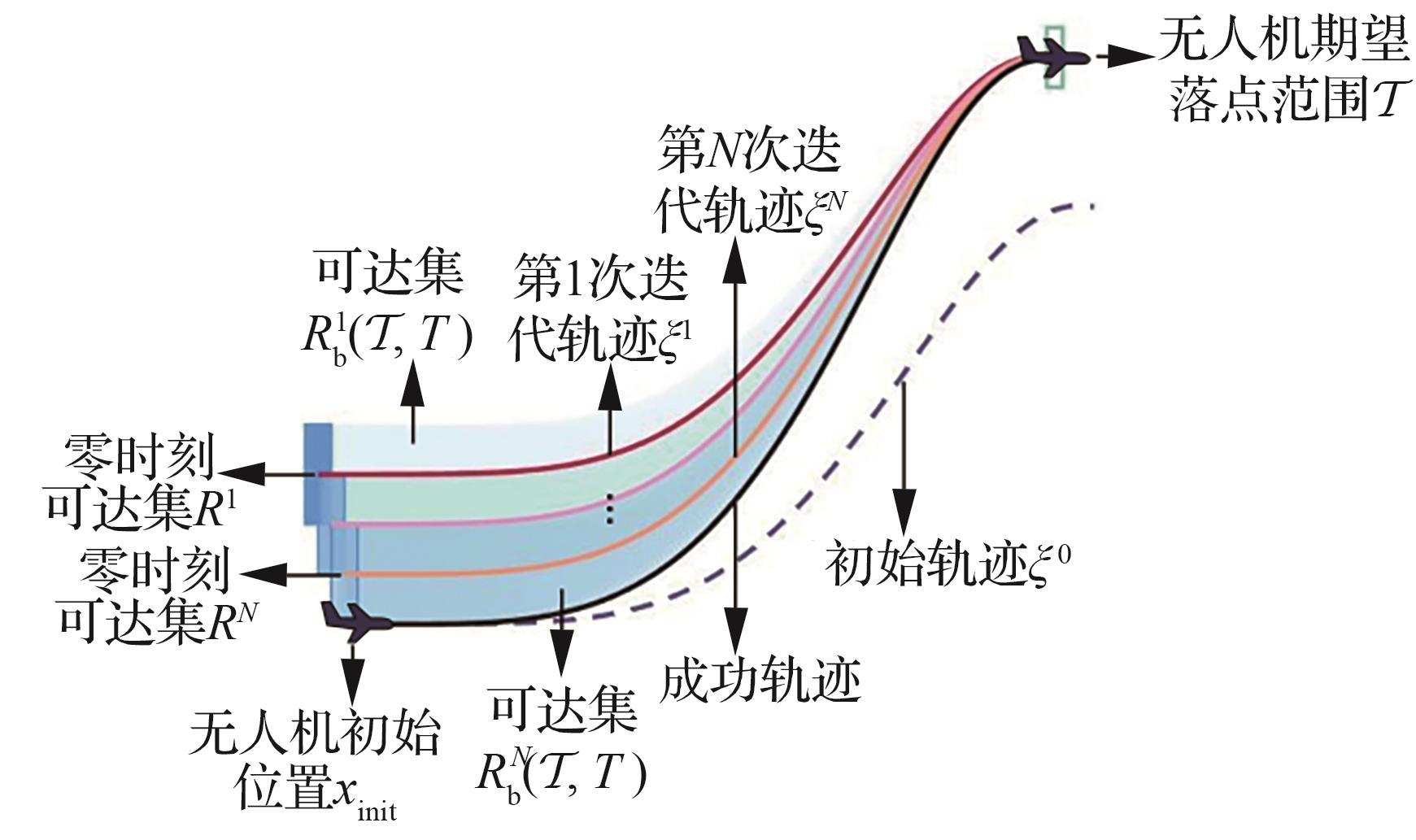
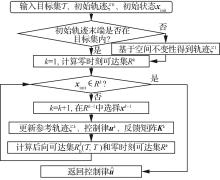
Fig.6
Flowchart of trajectory control method based on reachable set and iterative learning
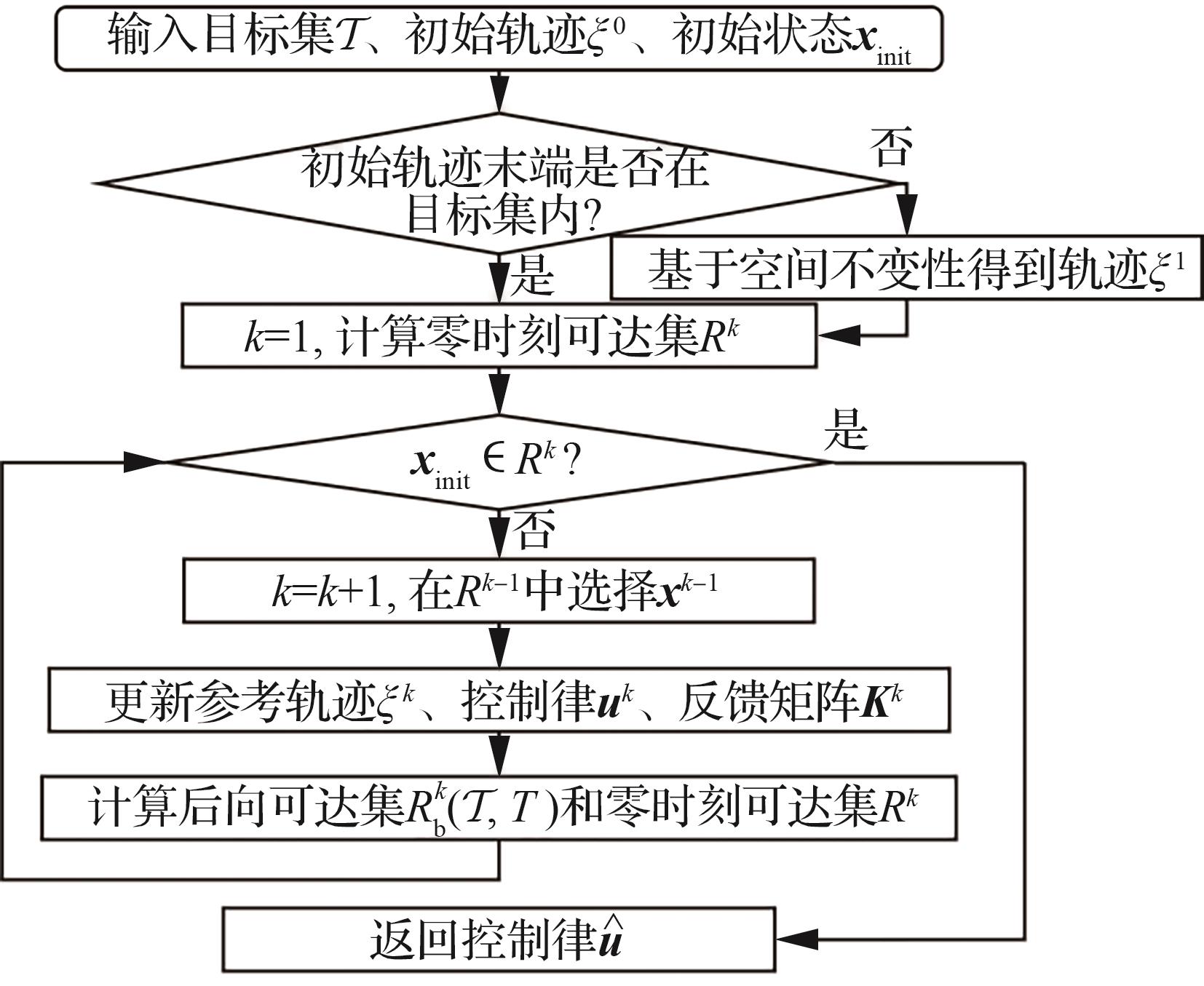

Fig.7
SINDy algorithm process
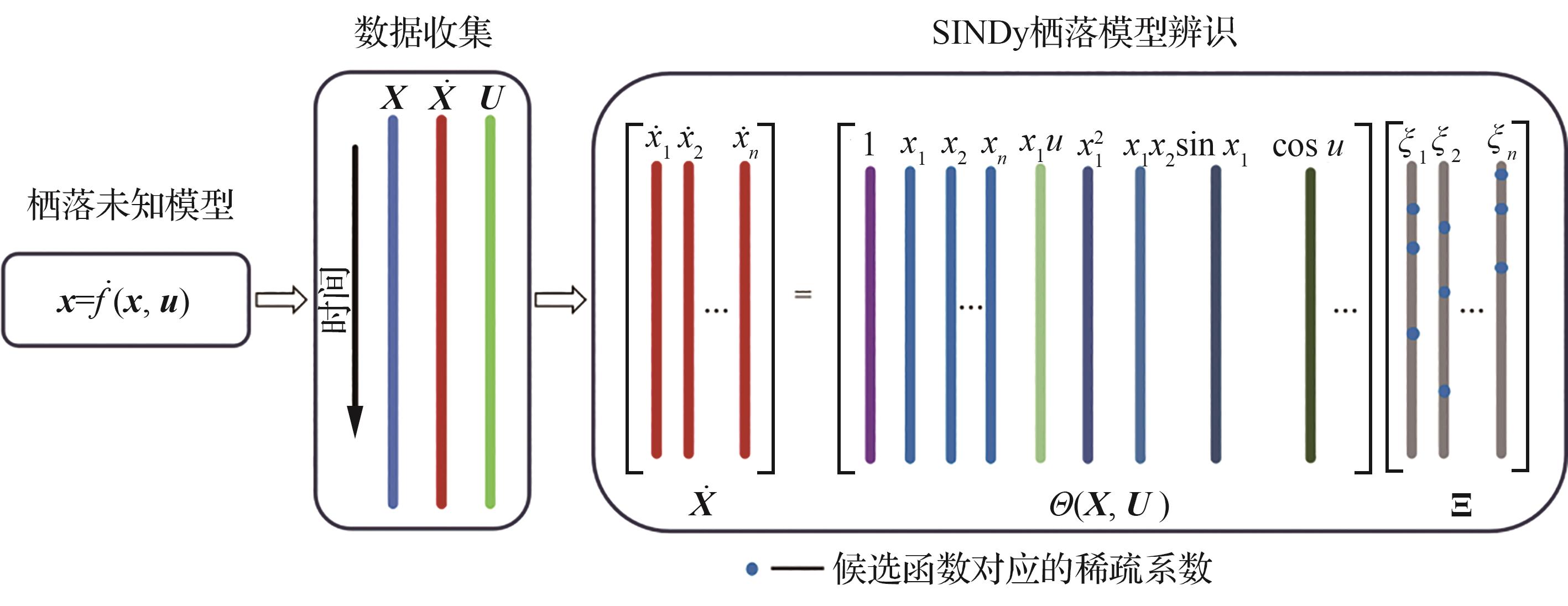
Table 3
Target area 𝒯 for landing maneuvers
| 状态变量 | 目标区域中心点值 | 目标允许偏差 |
|---|---|---|
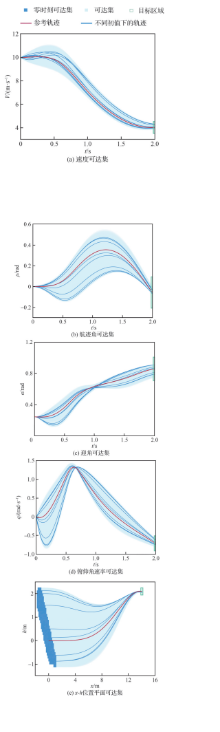
Fig.8
Reachable set of each state
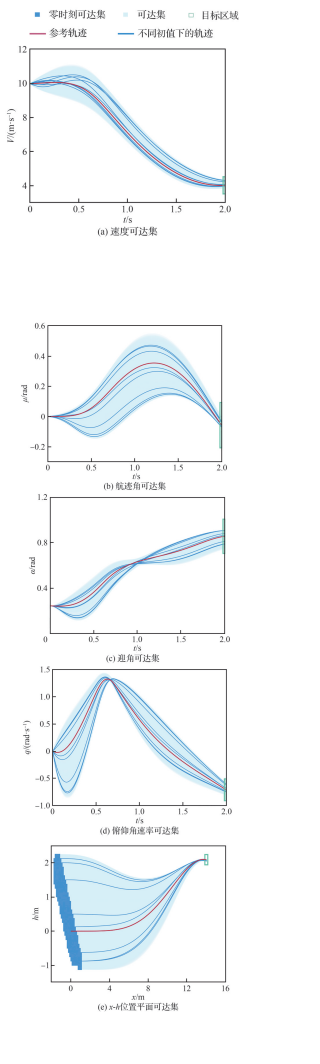
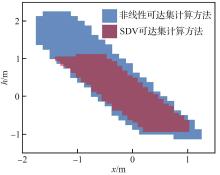
Fig.9
Comparison of initial reachable sets
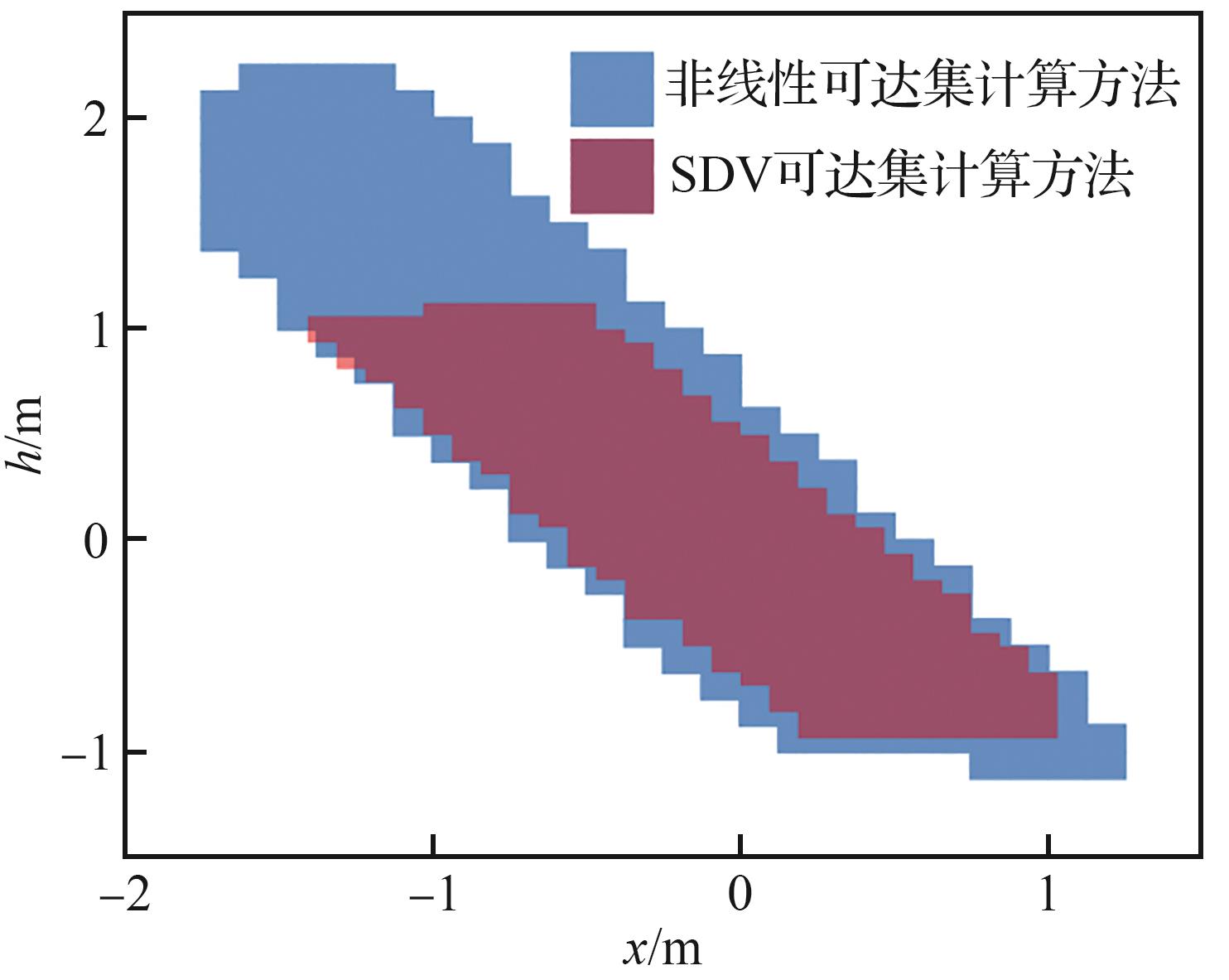
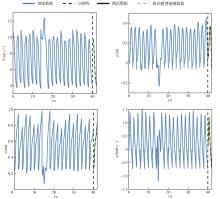
Fig.10
SINDy identification results
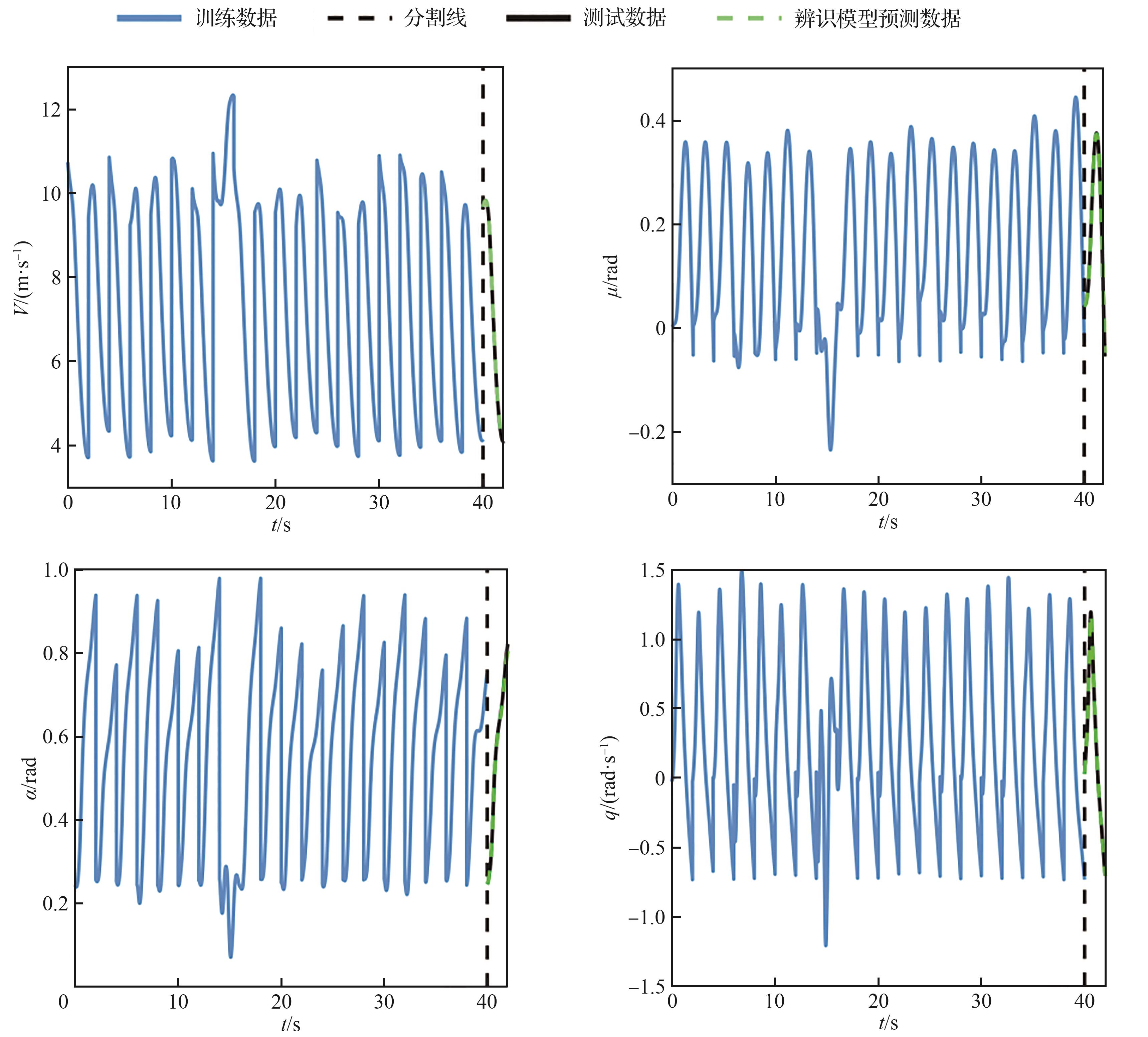
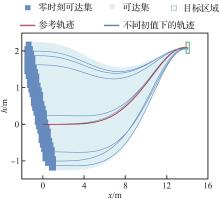
Fig.11
Position reachable sets based on identification model
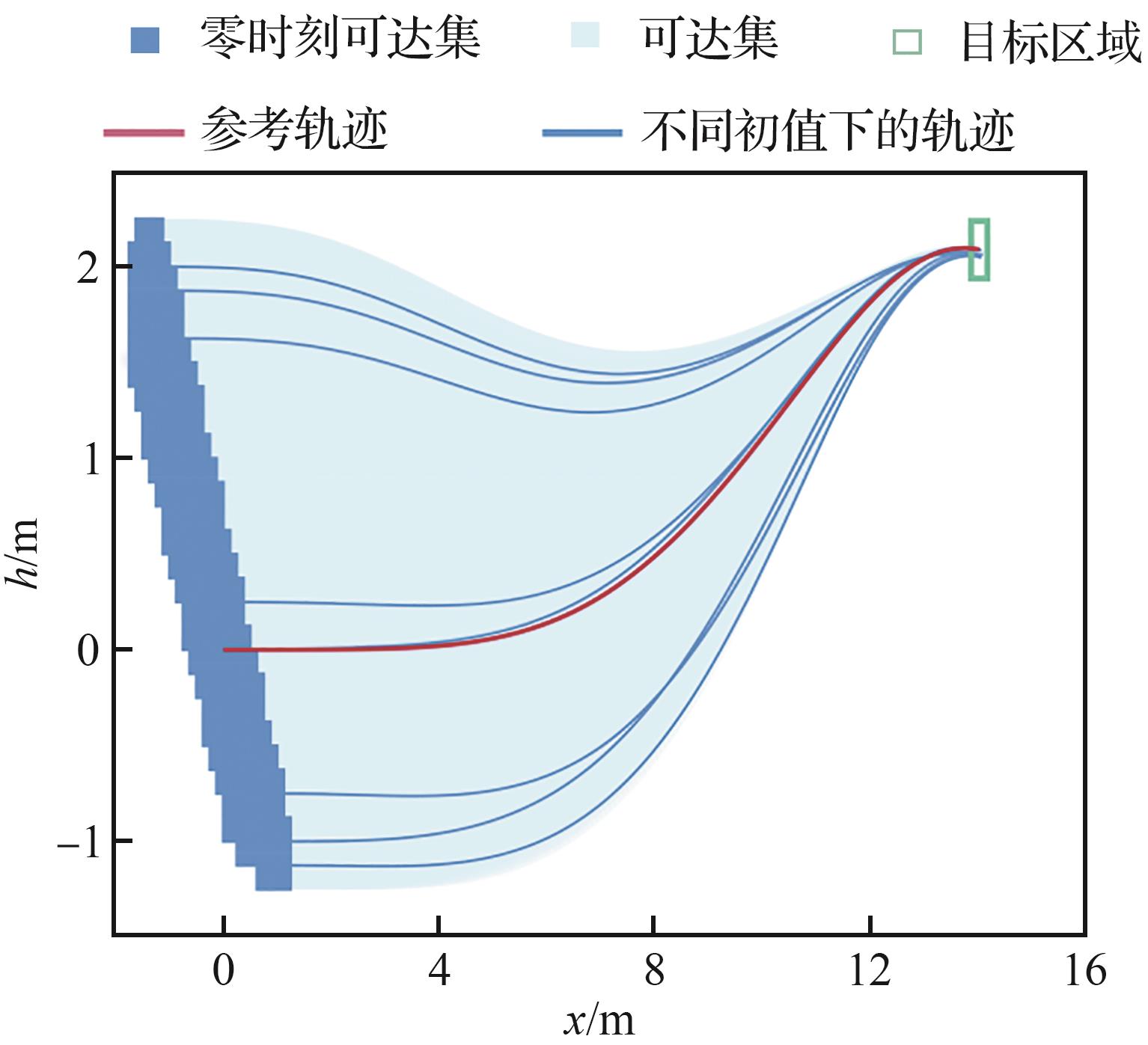
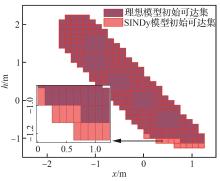
Fig.12
Comparison of initial reachable sets
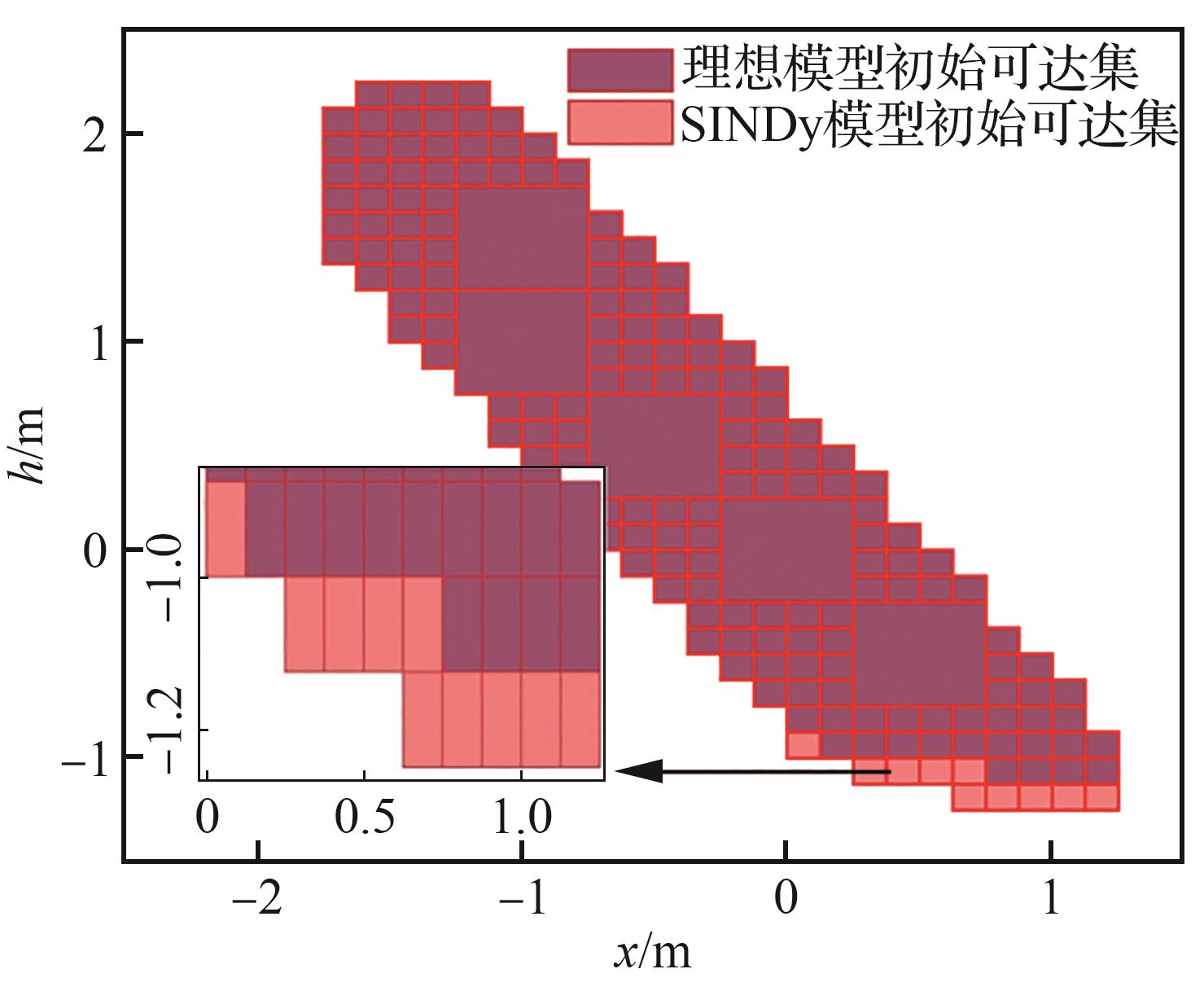
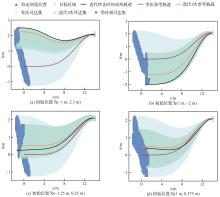
Fig.13
Simulation with random initial points
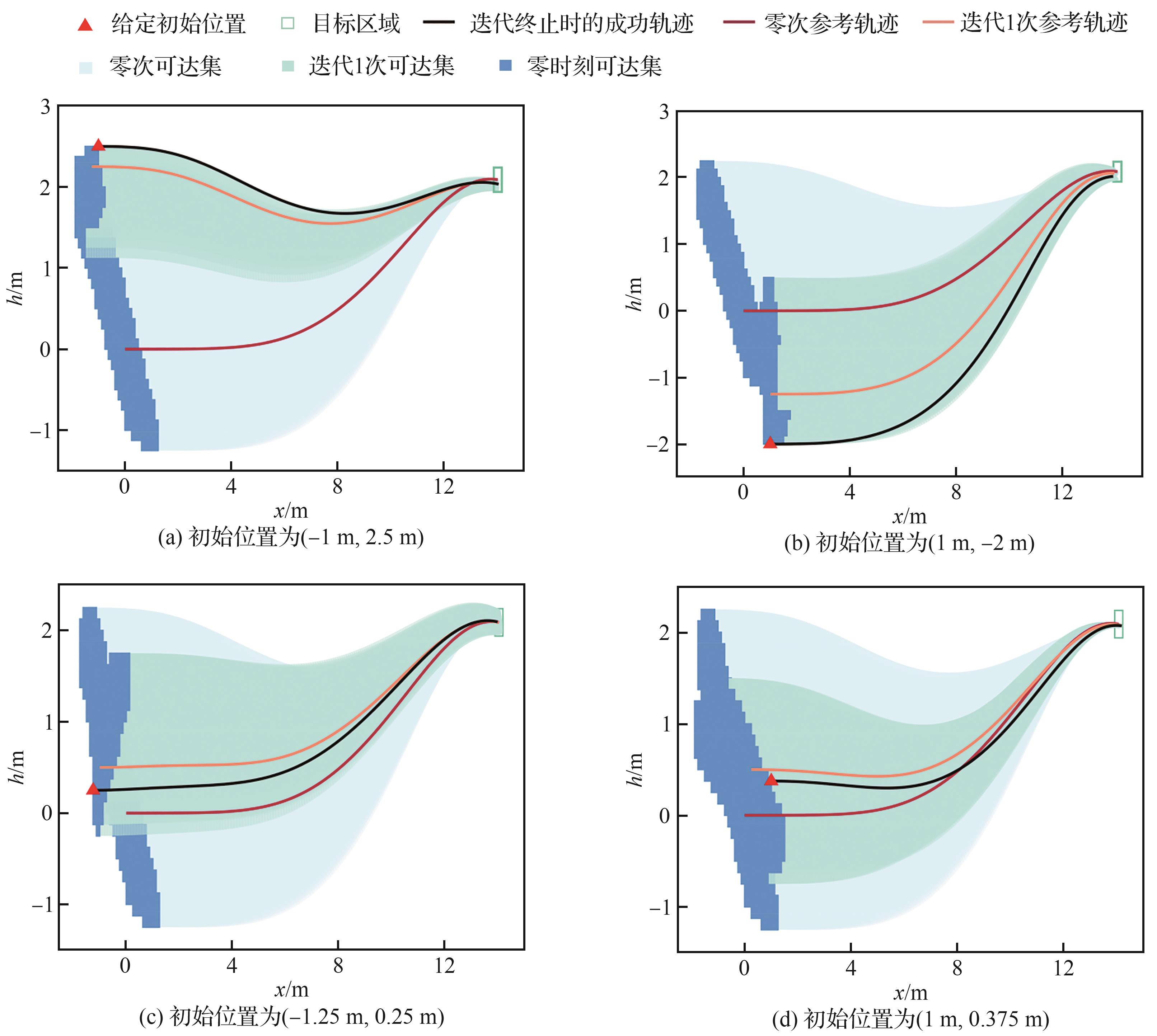
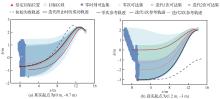
Fig.14
Initial point deviates significantly from the initial trajectory
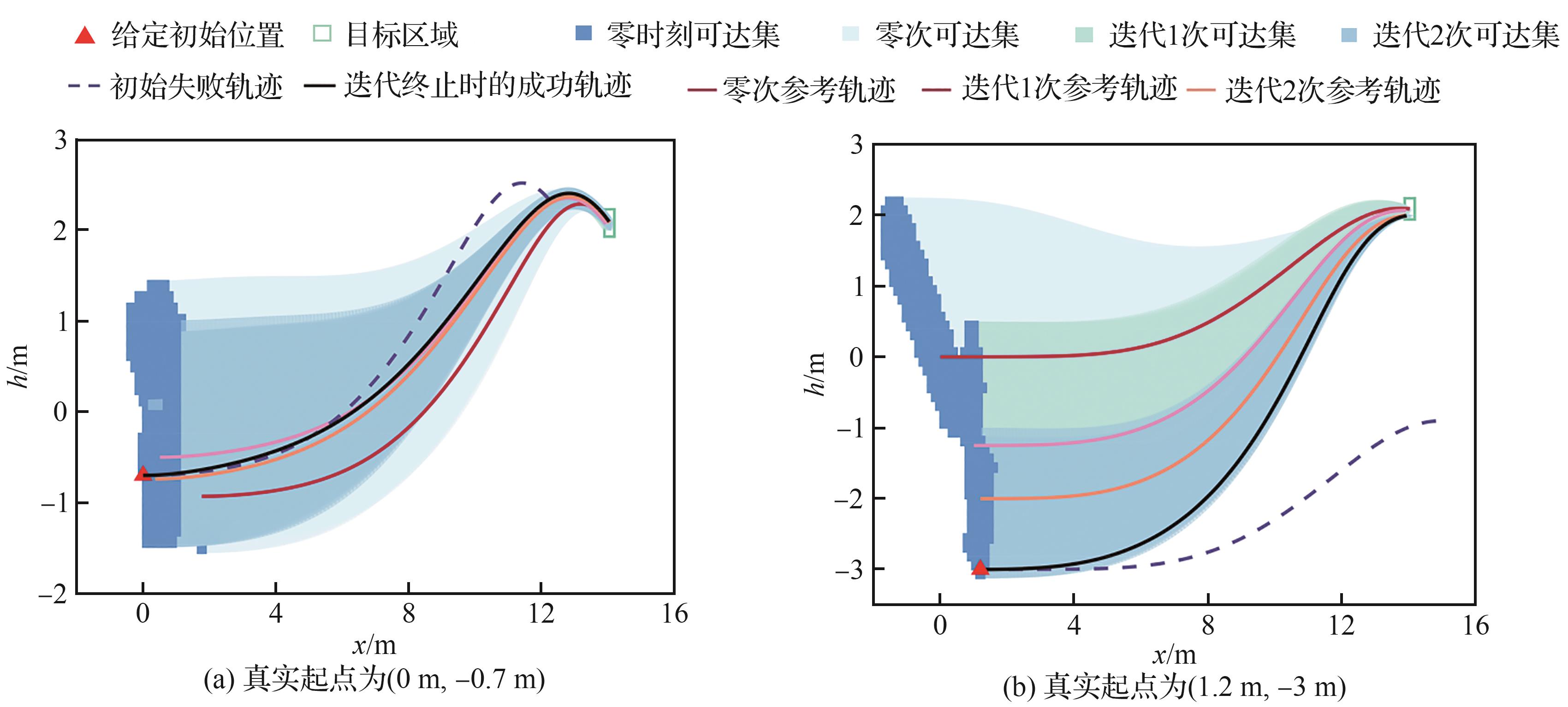
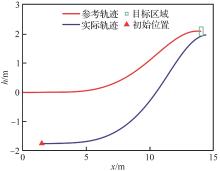
Fig.15
MPC control result
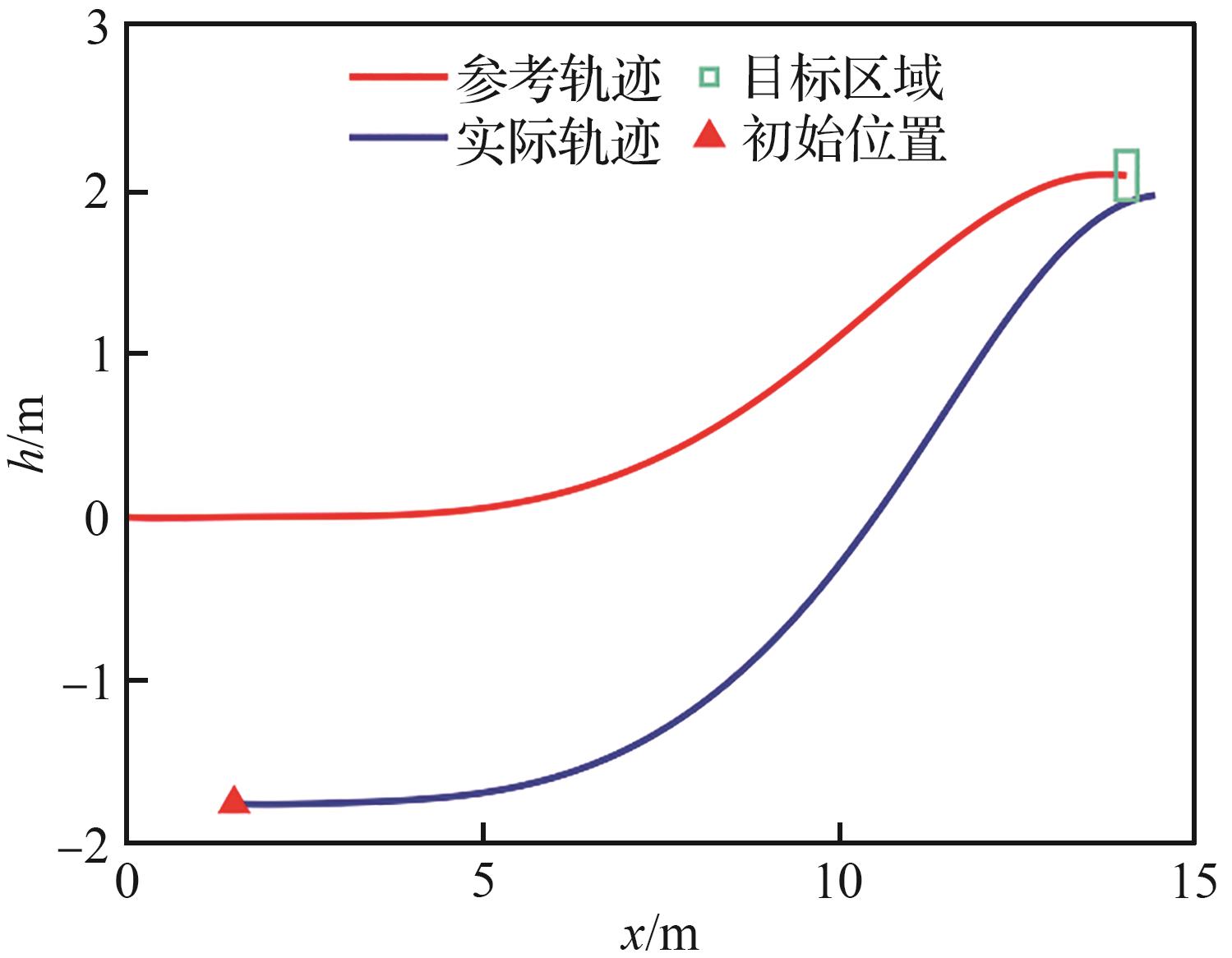
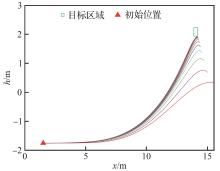
Fig.16
ILQR iteration 50 times result
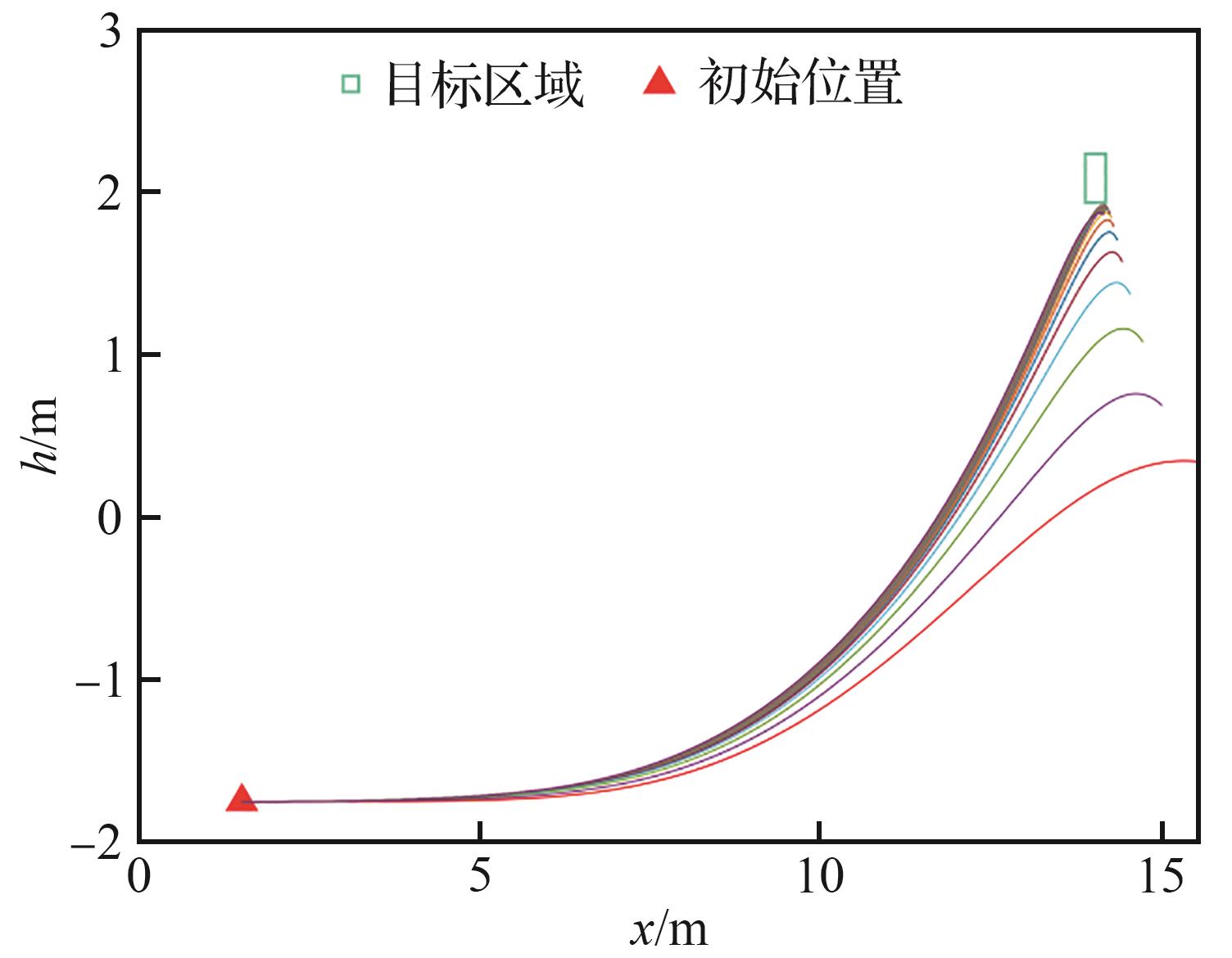
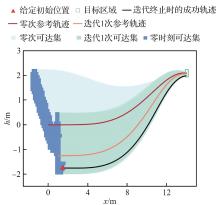
Fig.17
Iterative control results based on reachable sets
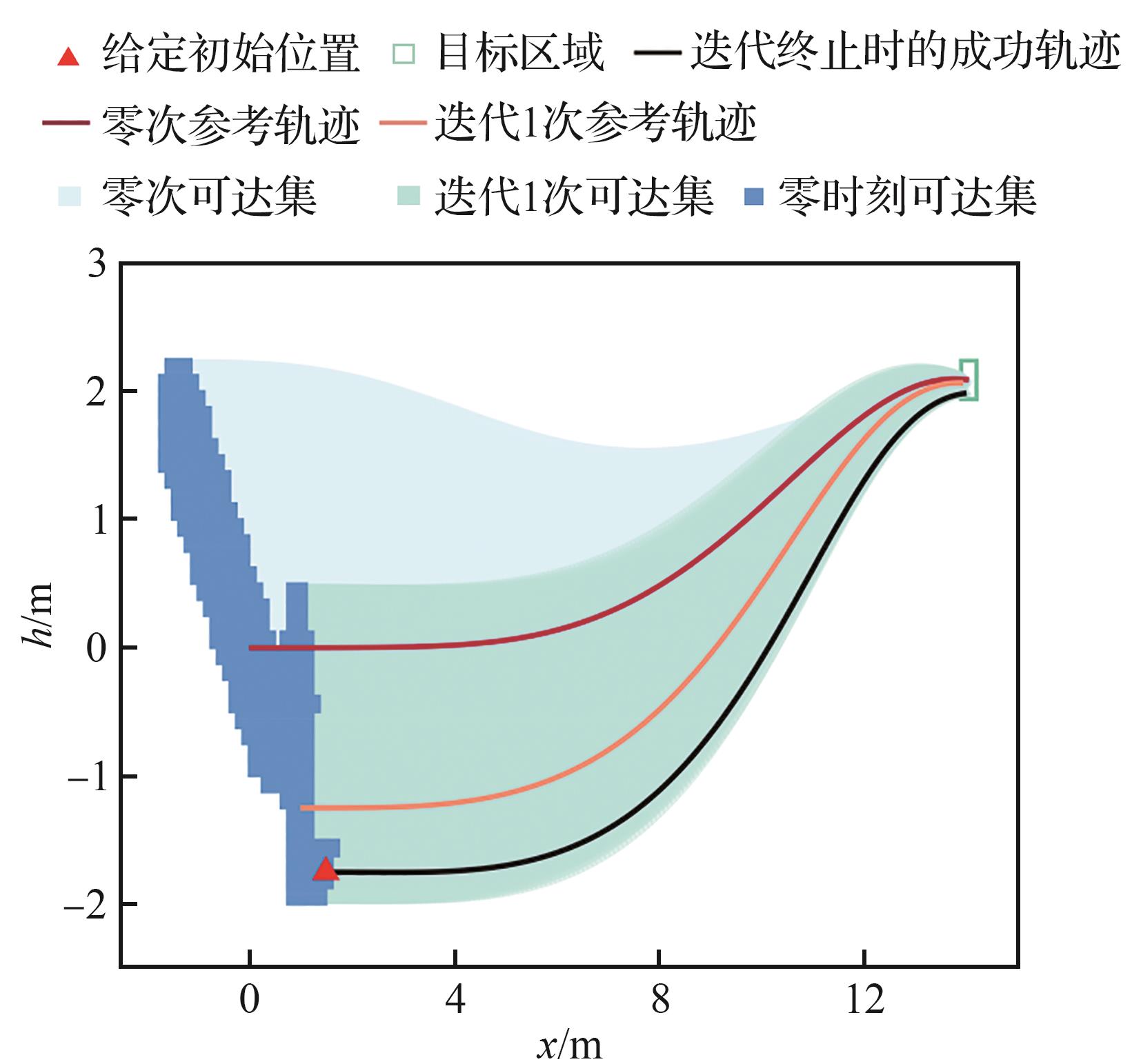
Table 4
Comparison of terminal control errors
| 控制方法 | ||
|---|---|---|
| MPC | ||
| ILQR | ||
| 基于可达集的迭代控制 |
| 1 | 曲东才. 超机动性技术及其战术优势探讨[J]. 飞机设计, 2006, 26(1): 65-68. |
| QU D C. Investigation into super-maneuverability and associated tactical superiority for high performance fighter aircraft[J]. Aircraft Design, 2006, 26(1): 65-68 (in Chinese). | |
| 2 | PANEQUE J L, DIOS J R M, OLLERO A, et al. Perception-aware perching on powerlines with multirotors[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 3077-3084. |
| 3 | MAO J, NOGAR S, KRONINGER C M, et al. Robust active visual perching with quadrotors on inclined surfaces[J]. IEEE Transactions on Robotics, 2023, 39(3): 1836-1852. |
| 4 | MOORE J, CORY R, TEDRAKE R. Robust post-stall perching with a simple fixed-wing glider using LQR-Trees[J]. Bioinspiration & Biomimetics, 2014, 9(2): 025013. |
| 5 | FEROSKHAN M, ZHENG Z W, GO T H. Solutions to planar aircraft perching problem utilizing sideslip maneuvering[J]. Journal of Aerospace Engineering, 2020, 33(6): 04020066. |
| 6 | 王无天, 何真, 岳珵. 飞行器栖落机动的轨迹跟踪控制及吸引域优化计算[J]. 北京航空航天大学学报, 2021, 47(2): 414-423. |
| WANG W T, HE Z, YUE C. Trajectory tracking control and optimal computation of attraction domain for aircraft in perching maneuvers[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(2): 414-423 (in Chinese). | |
| 7 | SONG Y S, LIANG S, NIU E Z, et al. A perched landing control method based on incremental nonlinear dynamic inverse[C]∥2022 4th International Conference on Control and Robotics (ICCR). Piscataway: IEEE Press, 2022: 82-88. |
| 8 | SONG Y S, TANG Y, MA B, et al. A singularity-free online neural network-based sliding mode control of the fixed-wing unmanned aerial vehicle optimal perching maneuver[J]. Optimal Control Applications and Methods, 2023, 44(3): 1425-1440. |
| 9 | 黄赞, 何真, 仇靖雯. 基于深度强化学习的无人机栖落机动控制策略设计[J]. 导航定位与授时, 2022, 9(6): 25-32. |
| HUANG Z, HE Z, QIU J W. Design of UAV perching maneuver control strategy based on deep reinforcement learning[J]. Navigation Positioning and Timing, 2022, 9(6): 25-32 (in Chinese). | |
| 10 | FLETCHER L, CLARKE R, RICHARDSON T, et al. Improvements in learning to control perched landings[J]. The Aeronautical Journal, 2022, 126(1301): 1101-1123. |
| 11 | 岳珵, 何真, 王无天. 变体辅助的无人机栖落机动模糊控制设计[J]. 南京航空航天大学学报, 2020, 52(6): 871-880. |
| YUE C, HE Z, WANG W T. Fuzzy control design for perching maneuvers of morphing UAVs[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2020, 52(6): 871-880 (in Chinese). | |
| 12 | ALTHOFF M, FREHSE G, GIRARD A. Set propagation techniques for reachability analysis[J]. Annual Review of Control, Robotics, and Autonomous Systems, 2021, 4: 369-395. |
| 13 | AWREJCEWICZ J, BILICHENKO D, CHEIB A K, et al. Estimating the region of attraction based on a polynomial Lyapunov function[J]. Applied Mathematical Modelling, 2021, 90: 1143-1152. |
| 14 | KLEFF S, LI N. Robust motion planning in dynamic environments based on sampled-data Hamilton-jacobi reachability[J]. Robotica, 2020, 38(12): 2151-2172. |
| 15 | BANSAL S, CHEN M, HERBERT S, et al. Hamilton-Jacobi reachability: A brief overview and recent advances[C]∥2017 IEEE 56th Annual Conference on Decision and Control (CDC). Piscataway: IEEE Press, 2017: 2242-2253. |
| 16 | ZHANG Y, DE VISSER C C, CHU Q P. Database building and interpolation for an online safe flight envelope prediction system[J]. Journal of Guidance, Control, and Dynamics, 2019, 42(5): 1166-1174. |
| 17 | FAN C C, KAPINSKI J, JIN X Q, et al. Locally optimal reach set over-approximation for nonlinear systems[C]∥2016 International Conference on Embedded Software (EMSOFT). Piscataway: IEEE Press, 2016: 1-10. |
| 18 | FAN C C. Formal methods for safe autonomy: Data-driven verification, synthesis, and applications[D]. Champaign: University of Illinois at Urbana-Champaign, 2019. |
| 19 | DUGGIRALA P S, VISWANATHAN M. Parsimonious, simulation based verification of linear systems[M]∥Computer Aided Verification. Cham: Springer International Publishing, 2016: 477-494. |
| 20 | ALTHOFF M, STURSBERG O, BUSS M. Reachability analysis of linear systems with uncertain parameters and inputs[C]∥2007 46th IEEE Conference on Decision and Control. Piscataway: IEEE Press, 2007: 726-732. |
| 21 | ALTHOFF M, STURSBERG O, BUSS M. Reachability analysis of nonlinear systems with uncertain parameters using conservative linearization[C]∥2008 47th IEEE Conference on Decision and Control. Piscataway: IEEE Press, 2008: 4042-4048. |
| 22 | KLEINHEERENBRINK M, FRANCE L A, BRIGHTON C H, et al. Optimization of avian perching manoeuvres[J]. Nature, 2022, 607(7917): 91-96. |
| 23 | 周紫君. 无人机机动飞行的学习模型预测控制[D]. 南京: 南京航空航天大学, 2022. |
| ZHOU Z J. Predictive control of maneuvering flight for unmanned aerial vehicles[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2022 (in Chinese). | |
| 24 | ALIKHAN M, PEYADA N K, GO T H. Flight dynamics and optimization of three-dimensional perching maneuver[J]. Journal of Guidance, Control, and Dynamics, 2013, 36(6): 1791-1797. |
| 25 | TAHK M J, HAN S, LEE B Y, et al. Trajectory optimization and control algorithm of longitudinal perch landing assisted by thruster[C]∥2016 European Control Conference (ECC). Piscataway: IEEE Press, 2016: 2247-2252. |
| 26 | SEILER P, BALAS G J. Quasiconvex sum-of-squares programming[C]∥49th IEEE Conference on Decision and Control (CDC).Piscatawaya: IEEE Press, 2010: 3337-3342. |
| 27 | HE Z, KAN Y Y, LI D. Deep stall landing strategy for small fixed-wing aircraft aided by morphing[C]∥2017 29th Chinese Control and Decision Conference (CCDC).Piscataway: IEEE Press, 2017: 6772-6776. |
| 28 | 李达. 飞行器栖落机动飞行轨迹优化与控制[D]. 南京: 南京航空航天大学, 2017. |
| LI D. Trajectory optimization and control of perching maneuvers for aircraft[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2017 (in Chinese). | |
| 29 | 王月, 何真, 张建兰, 等. 飞行器栖落机动切换控制设计及其吸引域计算[J]. 系统工程与电子技术, 2018, 40(11): 2519-2527. |
| WANG Y, HE Z, ZHANG J L, et al. Switching control design and calculation of domain of attraction for aircraft in perching maneuvers[J]. Systems Engineering and Electronics, 2018, 40(11): 2519-2527 (in Chinese). | |
| 30 | GIRARD A. Reachability of uncertain linear systems using zonotopes[M]∥Hybrid Systems: Computation and Control. Berlin, Heidelberg: Springer Berlin Heidelberg, 2005: 291-305. |
| 31 | ALTHOFF M. Reachability analysis and its application to the safety assessment of autonomous cars[D]. Munich: Technische Universität München, 2010. |
| 32 | SCHÜRMANN B, ALTHOFF M. Optimizing sets of solutions for controlling constrained nonlinear systems[J]. IEEE Transactions on Automatic Control, 2021, 66(3): 981-994. |
| 33 | BRUNTON S L, PROCTOR J L, NATHAN KUTZ J. Discovering governing equations from data by sparse identification of nonlinear dynamical systems[J]. Proceedings of the National Academy of Sciences, 2016, 113(15): 3932-3937. |
| 34 | KAHEMAN K, NATHAN KUTZ J, BRUNTON S L. SINDy-PI: A robust algorithm for parallel implicit sparse identification of nonlinear dynamics[J]. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 2020, 476(2242): 20200279. |
| 35 | 王雯洁. 无人机机动飞行的模型预测控制[D]. 南京: 南京航空航天大学, 2019. |
| WANG W J. Predictive control of maneuvering flight for unmanned aerial vehicles[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2019 (in Chinese). |
| [1] | Zhaohang LI, Changxuan WEN, Dong QIAO, Bo PANG. Geometrical solution of multi-pursuer/one-evader orbital pursuit-evasion game based on reachable set theory [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(S1): 730803-730803. |
| [2] | Muxuan PAN, Sirong LU, Ke CHENG, Xiaotao LI. Review on constraint control in aircraft engines [J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(23): 30533-030533. |
| [3] | LIANG Hanyu, ZHANG Wenhan, WANG Zhenhua, SHEN Yi. Fault detection and prognosis approach for satellite flywheel based on set-membership estimation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(3): 326080-326080. |
| [4] | WANG Shubo, HAN Yu, CHEN Jian, ZHANG Zichao, LIU Xuzan. Active disturbance rejection control of UAV attitude based on iterative learning control [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2020, 41(12): 324112-324112. |
| [5] | WU Pengwei, LI Yinghui, ZHENG Wuji, ZHOU Chi, DONG Zehong. Flight risk evaluation based on reachable set method at the phase of icing aircraft landing [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2018, 39(12): 122139-122139. |
| [6] | Li Daochun;Xiang Jinwu. Effect of Control Surface Freeplay on Nonlinear Aeroelastic Responses of an Airfoil [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2009, 30(8): 1385-1391. |
| [7] | Shang Yaoxing;Wu Shuai;Jiao Zongxia;Wang Xiaodong. Complex Mathematical Model of Electro-hydraulic Load Simulator Including Multi-stiffness and Nonlinear Factors in Ultimate Performance Research [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2009, 30(7): 1331-1340. |
| [8] | Zhang Yaoqiang;Chen Jianjun;Tang Liuding;Lin Liguang. Nonlinear Dynamic Characteristics of Rolling Element Bearing with Localized Defect on Outer Ring [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2009, 30(4): 751-756. |
| [9] | SONG Hua;ZHANG Hong-yue. Sensor Fault Diagnosis Approach for Nonlinear Systems Based on Fuzzy Parity Equation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2003, 24(1): 62-65. |
| [10] | CHEN Yu-dong;WENG Zheng-xin;SHI Song-jiao. ROBUST FAULT DIAGNOSIS FOR A CLASS OF NONLINEAR DISCRETE DYNAMIC SYSTEMS BASED ON LMI [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2002, 23(6): 520-524. |
| [11] | WANG Hong-wei;MA Guang-fu;WANG Zi-cai. FAST ALGORITHM OF ON LINE FUZZY MODELING FOR NONLINEAR SYSTEMS [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 1999, 20(3): 239-241. |
| [12] | Yan Xinggang;Lin Hui;Dai Guanzhong. D TYPE ON LINE LEARNING CONTROL FOR A CLASS OF NONLINEAR SYSTEMS [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 1999, 20(1): 27-29. |
| [13] | Zheng Tiesheng. STABILITY AND BIFURCATION OF HIGH ORDER ROTOR DYNAMIC SYSTEM WITH LOCAL NON ANALYTICAL BEARING SUPPORTS [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 1998, 19(3): 284-292. |
| [14] | Gong Cheng;Lu Guangshan;Wang Yongnian. STABILIZATION OF A FAMILY OF NONLINEAR SYSTEMS VIA FEEDBACK NONLINEARIZATION [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 1998, 19(1): 58-61. |
| [15] | Ma Kemao;Zhang Yong;Wang Zicai . ROBUST CONTROL FOR A CLASS OF NONLINEAR SYSTEMS [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 1997, 18(4): 493-496. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341