
民航运输系统作为全球化综合交通网络中的核心载体,其运营规模与战略价值在21世纪呈现显著的指数化增长特征[1]。为应对航班流量激增与空域资源有限间日益凸显的矛盾,国际民航组织(International Civil Aviation Organization, ICAO)于2005年正式提出基于航迹运行(Trajectory-Based Operations, TBO)的顶层框架[2]。该框架通过构建飞行航迹四维预测模型[3]、动态流量推演系统[4]以及多机协同冲突解脱机制[5]等关键技术体系,力求实现空域用户需求、空管服务供给与流量管控策略间的动态耦合,从而显著提升航空运输系统的运行效率、安全裕度与可持续发展能力。
值得关注的是,随着对航迹数据蕴含的高维时空特性的深入解析,基于模式分类与回归的人工智能技术正引发TBO技术体系的范式变革。如在航迹预测领域,传统基于运动学方程与确定性参数的建模方法,已逐步被融合气象信息、航空器性能参数及空管指令的多模态深度学习架构所替代[6]。在多机协同领域,冲突解脱策略亦从离散状态机驱动的规则库系统,向基于强化学习与博弈均衡理论的多智能体实时动态协同机制演进[7]。上述进展表明,高质量的航迹数据不仅为空管态势的实时感知提供了时空基准,更为推动TBO关键技术的智能化升级提供了核心数据支撑[8]。
然而,受到复杂电磁环境以及突发气象扰动等因素影响,基于二次监视雷达(Secondary Surveillance Radar, SSR)、广播式自动相关监视系统(Automatic Dependent Surveillance-Broadcast, ADS-B)等设备构建的空管监视体系仍面临航迹数据完整性不足的严峻挑战。如:2022年2月26日,注册号AD564C的Cirrus SR22通用航空器,其记录的四维航迹数据出现持续20 min的丢失问题;同年10月18日,达美航空 DAL 2439 航班(执飞俄克拉荷马至奥斯汀航线),也出现航迹数据传输中断达15 min的特情等[9]。此类事例,不仅影响了空管监视的时空连续性,更导致轨迹预测等TBO智能化核心技术的应用潜力与效能受阻。
尽管地面交通数据缺失值插补方法已形成较为完善的技术脉络[10],但既有方法在民航航迹数据插补场景中仍存在显著局限。其一,相较于具有严格路网拓扑约束的地面交通,航空器运行空间呈现更为自由的时空连续特性,导致基于离散图结构的神经网络方法[11]在轨迹估计中易产生拓扑失配误差;其二,现阶段航路监视传感器布设密度显著低于地面交通,致使航迹数据缺失模式更为多变,传统时序建模方法(如循环神经网络及其变体[12])在时间维度特征捕获过程中面临误差累积发散的风险;其三,航空器在起飞、巡航与降落阶段的动力学特性截然不同,且具有额外的空间计量维度(高度),造成飞行航迹所蕴含的时空关联模式更为复杂,这对基于先验确定参数的张量补全类方法[13]的动态泛化能力提出了更为严苛的要求。
现有文献分析表明,针对飞行航迹插补的专用方法研究仍较为稀少。其中,2021年四川大学林毅副研究员团队通过挖掘低秩动态特性与多维相位相关性,提出了张量补全方法,该方法在民航单航段航迹缺失值重建场景中展现出了优于传统插值方法的性能[14],但仍存在2个短板:一是方法所需的秩估计与正则化参数需基于先验知识确定并调优,导致方法鲁棒性随航迹样本的复杂度增加而急剧下降;二是基于单机单航段的建模范式难以捕捉大规模航路网络中的群体运动模式迁移规律。尽管天津工业大学荣垂田教授团队2024年研发的SA-AEGAN模型[15],通过结合自注意力机制的时间序列生成对抗网络实现了跨航段时空特征的关联建模,其生成对抗网络特性本质上更侧重数据分布模式的拟合而非具体数值的确定性插补,这与航迹重建所需的时空精度要求存在理论层面的不兼容。上述方法缺陷导致现阶段TBO下游智能化技术的研发,仍普遍沿用三次样条插值(Cubic Spline Interpolation, CSI)[16]等传统统计学插值方法,实现对缺失航迹的重建。但此类方法数学本质上受限于先验假设(如全局光滑敏感性假设),其插值曲线对已有航迹的噪声具有高敏感性特征,易导致非因果波动结果的产生。因此,开展具有强泛化能力、高鲁棒性的民航飞行航迹插补方法研究,实现高缺失率航迹数据质量与完整性的有效提升,对驱动空管技术的智能化升级具有重要的意义。
针对上述讨论,本文提出了一种新颖的融合表征转换与模式回归的航迹插补方法,该方法包含3个核心构件,分别是彩色图像表征转换、基于多尺度融合混合注意力的模式回归模型,以及基于自适应权重分配的全局与局部特征融合训练策略。经在真实民航航迹数据集Opensky[17]的综合实验验证,本文方法显著提升了对缺失率小于90%民航航迹的重建精度,为处理实际场景中面临的航迹丢失问题,提供了一种强泛化能力、高鲁棒性的解决途径。本文方法的技术贡献主要体现在以下3个方面:
1) 基于民航航迹数据潜在的运行规律,建立航迹数据时空四维转换为RGB通道彩色图像表征形式的编码模型,将航迹插补问题转化为图像补全任务,以实现对航迹数据复杂时空依赖的有效建模。
2) 基于编码得到的彩色航迹图像的相关特征,在模型各分辨率信息流中设计具有多卷积融合(Multi-Kernel Fusion, MKF)模块与改进型混合注意力(Improved Hybrid Attention, IHA) 模块,以实现跨尺度时空特征的有效提取。
3) 为强化模型对航迹图像缺失区域的重建经度,设计基于权重分配的全局与局域融合训练策略,以实现丢失航迹的准确插补。
1 问题分析
民航飞行航迹通常可表示为某航班从起飞到降落的总飞行时长 内,由空管监视系统以固定采样频率记录的 个航迹点所构成的具有等时间间隔、时空连续特征的序列 ,其数学表达式为
式中: 是以固定频率记录的等间隔时间区间,并且满足
表1 常规民航航迹表征形式Table 1 Conventional representation of civil aviation trajectories |
| 序号 | 经度/(°) | 维度/(°) | 高度/m | 时间戳/s |
|---|---|---|---|---|
| 1 | Lon0 | Lat0 | Alt0 | 0 |
| 2 | Lon t | Lat t | Alt t | |
| 3 | null | null | null | null |
| N-1 | null | null | null | null |
| N | Lon N- 1 t | Lat N- 1 t | Alt N- 1 t |
针对表1中所示随机时间戳可能出现的全维度信息缺失问题,当前主流研究方法采用循环神经网络(Recurrent Neural Network, RNN)及其衍生模型实施时序建模,同时结合图神经网络(Graph Neural Network, GNN)或卷积神经网络(Convolutional Neural Network, CNN)进行空间三维动态特征提取。然而,在高缺失率(超过50%)的航迹数据中,长时段连续缺失现象具有明显的高发概率。具体而言,基于RNN的“基于预测结果迭代预测”[18]的建模范式易导致误差累积效应,这种特性尤其在处理长序列缺失数据时更为显著,致使可重建时间戳数量级存在理论上限。相较之下,GNN方法虽可提取空间依赖关系,但民航运行中频繁出现的绕飞现象(如气象干扰、空管避让指令等动态因素引发的轨迹偏移),导致基于预设航路构建的静态逻辑拓扑结构与实际运动轨迹易产生显著偏差[19]。而卷积神经网络的应用在处理常规表格化表征形式的航迹数据时则面临双重制约:首先,其平移不变性的核心特性难以适配时间维度动态演变特征的提取需求;其次,受限于局部感受野的设计机理,CNN模型在捕获长程空间关联模式时存在显著不足,致使其在非线性特征挖掘方面的优势特性无法得到有效发挥。这种多维度的模型局限性共同制约了现有方法在高缺失率航迹数据重建任务中的性能表现。
原始航迹数据可视为按等间隔时间戳分布的三维空间序列,其时间顺序排列与数字图像之字形扫描方式形成的RGB三通道像素矩阵[20]在结构上具有显著相似性。此外,四川大学陈虎老师团队[21]还观察到不同航班在相近起降距离下的飞行时长表现出统计收敛特征,这表明各航班航迹数据在宏观尺度上可能遵循相似的时空变化模式。因此,本文提出一种航迹数据时空四维转换编码模型,将其转化为RGB通道彩色图像的表征形式,从而将传统的时空序列插补问题转变为计算机视觉领域的图像修补任务。这种方法具有2大优势:首先,转换后的彩色航迹图像能够更直观地揭示民航航迹中蕴含的时空连续性特征;其次,通过针对图像数据的卷积神经网络类回归模型,可以更有效地捕捉航迹的复杂时空依赖关系,避免RNN及其变体的递归推理模式引入的累计误差问题,以及GNN及其变体在处理真实轨迹拓扑时的局限性。
在图像修补领域,根据对缺失区域填充内容的唯一性,现有技术可大致分为确定性图像修补和随机性图像修补2大路线[22]。其中,确定性图像修补方法旨在实现缺失区域的精确且唯一填充,确保输出结果的一致性;反之,随机性图像修补方法则侧重于生成与图像整体语义相符的多种可能结果。鉴于本研究的目标是准确预测丢失的飞行航迹数据,基于任务需求,选择采用确定性图像修补方法来实现航迹插补。
然而,对于自然图像的大规模缺失区域,Transformer方法通过计算Token间的动态关联,能够克服CNN方法因感受野限制而无法捕捉长程依赖的问题。但在本文所研究的航迹转换图像中,图像尺寸较小,且缺乏自然图像中明显的边缘语义特征。基于此,CNN类方法尽管能够通过多尺度融合架构实现了对全局尺寸的覆盖,但仍难以有效提取航迹图像中空间(时间维度)和通道(空间维度)间的动态变化模式。另一方面,航迹数据本身具有高度的时空连续性,这导致转换后的图像呈现出色调连续变化的特性,即相邻像素间的关联性强于远距离像素间的关联。因此,直接应用Transformer类方法可能无法充分强调局部像素关联,导致填补精度下降。综上所述,本研究针对上述方法的不足,设计了一种结合多卷积融合和改进型混合注意力模块的多尺度网络架构,从而实现对航迹转换图像缺失区域的精确填补,并最终完成航迹数据补全任务。
2 研究方法
2.1 彩色图像表征转换
式中: 是经分析确定的可泛化表征各航班轨迹全局时空特征的最大航迹点数量,此时 ; 是固定的采样时间间隔。
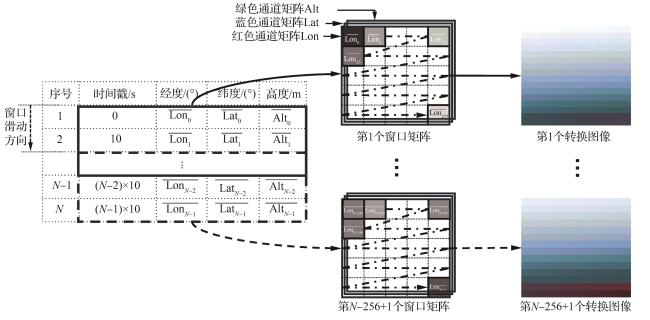
式中: 、 与 分别代表经归一化处理后的 、 与 ; 、 、 、 与 、 则分别代表 轨迹数据中经度、纬度、高度序列中的最大与最小值。
2.2 基于多尺度融合混合注意力的模式回归模型

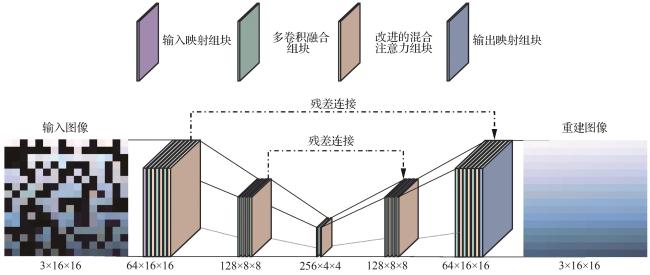
然后,鉴于转化后的图像补全任务的实质是一项“low-level”计算机视觉问题,其适用的回归模型应更注重对浅层信息流的处理[32]。因此,将设计的多卷积融合模块(MKF)与改进的混合注意力模块(IHA)分别在回归模型 、 与 的信息流中各设置3、2、1组。
最后,利用感受野为 的转置卷积层与Leaky-ReLu激活函数层串联构建输出映射组块,实现完整彩色航迹图像的重建。其中,重建图像中原缺失位置的像素各颜色通道强度可还原为缺失航迹的空间信息,而相关像素的位置信息可解码为缺失航迹的时间戳信息。
2.2.1 多卷积融合模块(MKF)
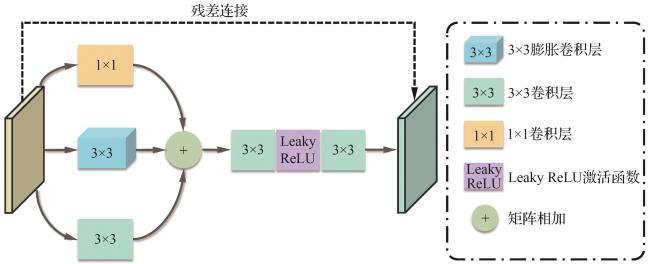
首先,鉴于彩色航迹图像色调连续性变化的显性特征,高分辨率信息流(通常反应输入特征图的边缘梯度、颜色变化等显性特征)中邻近时间戳航迹点间(局域)的时空依赖关系应被充分提取;同时,考虑到低分辨率信息流通常会表达输入特征图抽象的语意信息,其所蕴含的全局动态关系(诸如轨迹走向、飞行状态等隐性模式)也应被有效认知。因此,并联设置感受野为 、 的卷积层与1个膨胀率为2、感受野为 的膨胀卷积层,实现高分辨率信息流( 、 )局域特征与低分辨率信息流( )全局依赖的有效提取。需要说明的是,膨胀率为2、感受野为 的膨胀卷积层的实际作用域为 ,可实现在不增加额外计算量并保持特征图尺寸不变的条件下[35],对 信息流特征图的全局覆盖,特征提取过程如下
式中: 与 分别代表该过程的输入/输出特征表征; 、 与 分别代表 核尺寸卷积处理、 核尺寸膨胀卷积处理与 尺寸卷积处理;而 、 与 则代表相应处理后输出的结果。
然后,借鉴额外设置卷积层配合非线性激活函数的串联组合可进一步提升模式回归模型对复杂关联拟合效果的特性[29]。MKF对融合后的特征图在不改变尺寸的条件下,进行“卷积层-激活层-卷积层”的串联处理
式中: 代表带泄露线性整流函数,其数学表达式如下
式中: 为一个 区间的常数,以防止负数输入造成梯度为0的问题,本文中 。
最后,为缓解可能出现的梯度消失问题并加速训练拟合,MKF也在其输入特征图与输出特征图间设置经典的残差连接[36]。
2.2.2 改进型混合注意力模块(IHA)
1) 在Sigmoid激活函数层前设置额外的Softmax函数层,可使模型注意力的动态关联捕获能力得到显著增强[39]。其中,Sigmoid与Softmax函数表达式如下
式中: 代表第 个输入;而 则代表输入向量的总数量。
2) 通道注意力处理流与空间注意力处理流间共享一个辅助信息流,可在尽量减少计算量负荷的前提下有效增强模型在图像增强、补全任务中的建模能力[29]。
3) 在空间注意力机制信息流中引入额外的并行处理流可进一步强化模型对关键模式的拟合[40]。
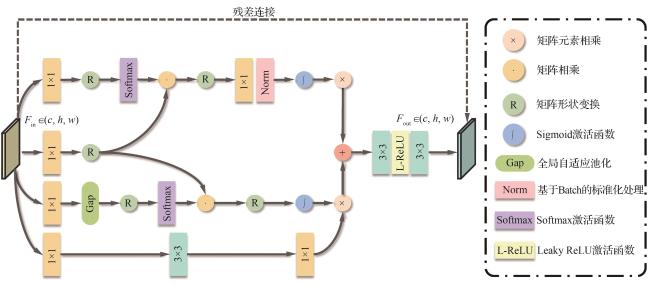
表2 IHA模块不同处理层中特征图的尺寸Table 2 Detailed information of different processing layers in IHA module |
| 分支名称 | 输入特征尺寸 | 处理层名称 | 输出特征图尺寸 |
|---|---|---|---|
| 通道注意力处理信息流 | 感受野卷积 | ||
| 矩阵形状变换 | |||
| Softmax 激活函数 | |||
| 矩阵相乘 | |||
| 矩阵形状变换 | |||
| 感受野卷积 | |||
| 基于Batch的标准化处理 | |||
| Sigmoid 激活函数 | |||
| 矩阵元素相乘 | |||
| 共享的辅助信息流 | 感受野卷积 | ||
| 矩阵形状变换 | |||
| 空间注意力处理信息流(上分支) | 感受野卷积 | ||
| 全局自适应池化 | |||
| 矩阵形状变换 | |||
| Softmax激活函数 | |||
| 矩阵相乘 | |||
| 矩阵形状变换 | |||
| Sigmoid激活函数 | |||
| 矩阵元素相乘 | |||
| 空间注意力处理信息流(下分支) | 感受野卷积 | ||
| 感受野卷积 | |||
| 感受野卷积 |
2.2.3 基于权重分配的全局与局域融合训练策略
应用传统计算机视觉领域的训练策略直接处理航迹插补问题仍存在2个问题:其一,在模式回归过程中,输入图像全局的像素强度均被调整,这不仅造成计算资源的无效损耗,更会显著降低模型的拟合效能[41];其二,鉴于该策略会无差别地改变原始航迹数据在重建彩色图像中的对应像素强度,导致航迹插补精度的系统性下降。
针对上述问题,通过建立全局特征与局部特征的动态融合训练策略,以实现保持已知区域像素强度稳定性、提升缺失区域重建精度并优化计算资源分配效率的目标,基于权重分配的全局与局域融合训练策略示意图如图6所示。
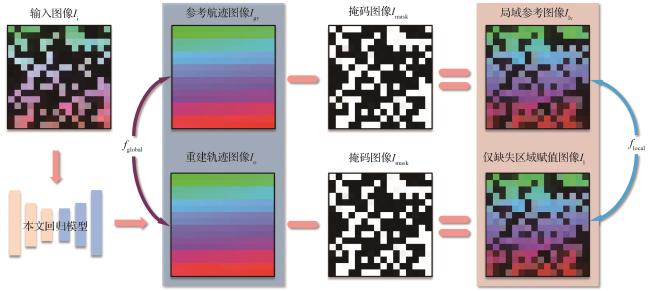
首先,该策略通过对模型直接生成的重建航迹图像 与未缺失的完整参考航迹图像 分别进行处理,得到仅缺失区域被赋值的重建图像 、以及仅包含缺失区域真实值的局域参考图像 ,相应处理如下
式中: 代表由输入图像经二值掩码处理后得到的掩码图像,其缺失区域的各像素强度被重置为0,而已知区域的各像素强度被重置为1; 处理则用于确保得到图像各像素强度值严格约束于 归一化区间内。
随后,该策略通过构建全局与局域双训练通道,选用恰当的损失函数并赋予合理的权重分配比例,有助于回归模型进一步提升拟合能力。
式中: 与 为权重分配系数。由于 对于目标图像与参考图像中像素级的微小差异更为敏感,而 则更注重加速收敛,因此设置 、 。该策略中 与 如下
式中:角标 代表重建像素的具体坐标; 指重建区域的像素总量。
针对全局训练通道,鉴于全量变化指标 [45]具有平滑颜色过渡的作用,可引导重建的全局图像具备更连贯的色调变化,与民航运行轨迹的时空连续性特征相一致。同时,考虑 可加速训练收敛的作用。因此,选用 与 的组合作为损失函数 , 计算如下
式中: 是平衡噪声与平滑性的调节参数,一般取 。而 则如下
式中: 、 。最后,将全局损失函数与局域损失函数进行相加,共同组成总体损失函数 如下
这种权重分配比例的设置可引导模型更加关注对缺失区域像素值的准确重建,并实现加速训练收敛、保持未缺失区域像素强度稳定性的目标。
3 实验准备
3.1 实验设计
本文的方法建立在“不同航班航迹数据在宏观层面呈现相似的时空变化模式”这一预设假设之上,其理论基础的可靠性需通过实证研究进行验证。同时,基于此假设,本研究还需评估该方法在航迹数据缺失区域填补方面与图像插补技术进行比较时的优势。此外,考虑到民航轨迹插补领域的当前研究现状,通过对比实验来检验本方法相对于现有先进插补算法的性能提升至关重要。最后,针对回归模型的模块化架构设计以及改进训练策略的有效性,有必要开展系统性的验证。为实现上述目标,本研究将从以下3个维度展开实验分析:① 可行性分析;② 先进性测试;③ 消融实验。
可行性分析实验:实验采用对比验证框架:含缺失区域的航迹图像(输入图像)、经CNN类方法MAN[23]、Transformer类方法CANet[24]与本文方法输出的图像(重建图像)以及包含完整航迹的基准图像。通过定性(视觉对比)与定量(指标计算)的双重评估,完成可行性论证。其中,定量评估选取计算机视觉领域常用的峰值信噪比(Peak Signal-to-Noise Ratio, PSNR)[46]以及结构相似性指数(Structural Similarity Index Metric, SSIM)[47]作为评价指标。PSNR主要用于衡量目标图像与基准图像各像素强度的差异,而SSIM则主要侧重衡量相关图像的结构相似度。PSNR与SSIM的计算如下
式中:角标 代表每对图像中包含的比特数; 为平均绝对误差,其计算方法与式(16) 一致; 与 分别代表重建图像与基准图像的方差; 与 则分别代表重建图像与基准图像的协方差; 与 作为常数系数用于防止分母为0导致无法计算,其取值一般由式(22) 和式(23) 确定。需要说明的是,SSIM与PSNR的评价值越大,说明两图像的相似性越高
式中: 是像素强度的最大值; 与 是2个先验系数,通常取 、 。
先进性测试实验:鉴于张量补全方法[14]仅适用于单机单航段轨迹建模,难以满足大规模、多模态航迹数据缺失值补全的需求。因此本文先进性测试实验选取了四维航迹插补领域广泛采用的三次样条插值法(CSI)[16]、近期提出的结合自注意力机制的时间序列对抗生成网络模型SA-AEGAN[15],以及2类基于Transformer架构的插补方法:DTIN(Dual Transformer based Imputation Nets)[48]与多变量Transformer插补网络(Multivariate Time-Series Imputation with Transformers, MTSIT)[49]共同作为基准方法,以验证本文提出方法的优越性能。实验评估采用定性与定量相结合的方式,全面检验各方法的表现。其中,定量评估通过平均误差(MEAN)和标准差(Standard Deviation, SD)2项指标,系统比较不同方法在不同缺失率下对航迹经度、纬度、高度及实际距离的重建误差,从而为方法的性能优劣提供客观依据。
消融实验:实验通过将完整的回归模型(OURS)、不包含多卷积融合模块的回归模型(wo-MKF)、不包含改进的混合注意力模块的回归模型(wo-IHA)以及不包含基于权重分配的全局与局域融合训练策略的回归模型(wo-TS)所重建的航迹数据,进行基于PSNR、SSIM、Mean与SD在重建不同缺失率航迹数据的平均值4种评价指标综合对比;同时,实验选用从测试集中任选的2个航迹进行重建结果的直观展示,以验证本文方法在回归模型中所提出的相关模块与训练策略的有效性,完成消融实验。
3.2 实验数据说明
表3 下载的航迹点所包含的具体信息Table 3 Detailed information contained in each downloaded trajectory point |
| 数据类型 | 数据示例 |
|---|---|
| Unix时间戳/s | 1 609 725 600 |
| ICAO航空器识别号 | 45ce55 |
| 经度/(°) | 50.675 17 |
| 纬度/(°) | 6.738 18 |
| 水平速度/(km·h-1) | 141.197 77 |
| 航向/(°) | 86.857 05 |
| 垂直速度/(km·h-1) | -3.251 20 |
| 通信呼号 | SRR7 881 |
| 航空器处于地面标识 | False |
| 告警状态 | False |
| 二次代码 | 1 155 |
| 气压高/m | 3 398.52 |
| 最后更新Unix时间戳 | 1 609 725 598.995 |
在数据预处理阶段,本研究设计了系统性的过滤机制,以构建高质量的民航轨迹数据集。首先,依据应答机编码(squawk)的定义,剔除表示飞机劫持(7500)、无线电故障(7600)及紧急情况(7700)的轨迹数据,以确保数据集的合理性。其次,按时间、ICAO24地址和航班号进行分组,每组仅对应单一航班的轨迹。随后,移除时间间隔超过10 s的组以及相邻位置数据重复的组,以保证数据的时间连续性和唯一性。接着,考虑到民航不同航班飞行模式的相似性及民航飞机速度的物理约束,过滤掉相邻轨迹间高度、纬度及经度差过大的组,以剔除异常轨迹。此外,根据民航航班号命名规则,仅保留航班号前两到三个字符为字母的组,排除通用航空轨迹的干扰。最后,删除轨迹点少于256条的组,并将剩余组分别转换为独立的表格文件,最终生成966条完整且真实的民航运行轨迹数据集。
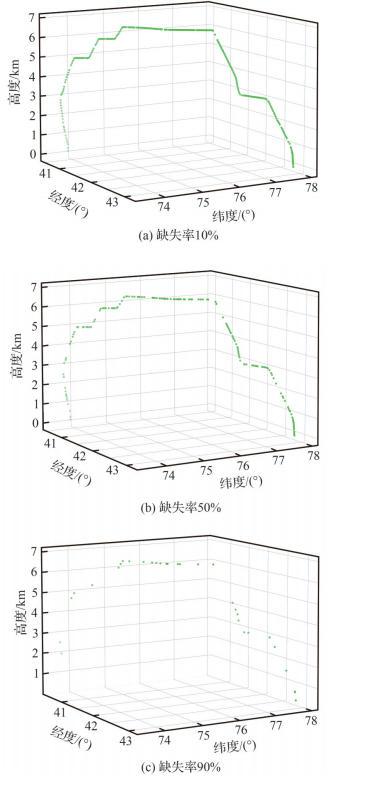
在缺失模拟阶段,首先采用尺寸为 滑动窗口技术处理得到的966条轨迹数据,生成与之对应的62 550个航迹表格;其次将生成的62 550个航迹表格以固定随机种子 ,按照预设的缺失率 对原始数据施加掩码,构建10组不同缺失率的掩码数据表格,如图7所示,以2022年7月12日捷蓝航空JBU486航班的轨迹数据为例,展示了以10%、50%和90%缺失率施加掩码后的轨迹数据可视化结果;随后,对于本文提出的方法,采用彩色图像表征转换技术将所有掩码数据表格转化为对应的彩色航迹图像进行模型训练与测试,而先进性测试实验中的对比方法则直接采用掩码数据表格进行模型训练与测试。为确保评估的规范性,本文方法与对比方法均将数据按固定比例划分为3个互斥子集:训练集(占60%)用于优化模型参数,验证集(占20%)用于超参数调整,测试集(占20%)用于最终性能评估。值得注意的是,各子集中缺失率为0%的数据均作为参考基准,用于后续的性能对比计算。
3.3 实验参数及环境描述
3.3.1 实验参数
本研究采用小批量梯度下降优化策略,设置批量尺寸为32以平衡内存效率与参数更新稳定性。整个训练过程包含200个训练周期,采用Adam优化器[50]进行参数更新,其动量衰减系数分别设定为 、 ,初始学习率 。学习率调度采用多阶段指数衰减策略,具体可表述为
式中: 表示当前训练周期, 为预设的衰减间隔阈值(取值为35、76、119、171及190)。
3.3.2 实验环境
本研究实验框架基于PyTorch 2.0深度学习框架构建,利用NVIDIA® CUDA 12.1并行计算架构进行张量运算加速。硬件平台配置为:NVIDIA GeForce RTX 4080移动版GPU(含7 424个CUDA核心,显存带宽716.8 GB/s,FP32算力48.7 TFLOPS),搭配Intel® Core™ i9-13900HX处理器(24核32线程,睿频5.40 GHz)构成异构计算系统,内存规格为64 GB DDR5-4800。为保障实验可重复性,所有运算均采用单精度浮点(FP32)格式,并固定随机种子为 。
4 实验结果与分析
4.1 可行性分析
在可行性分析实验中,本研究首先针对从测试集随机选取的捷星航空 JST724 航班2022年5月10日运行轨迹构建的测试集开展视觉对比分析。通过将原始输入图像(含不同缺失率)、MAN方法重建图像、CANet方法重建图像、本文方法重建图像与基准参考图像进行可视化比对(如图8所示),发现相较于MAN方法与CANet方法,本文方法能够更为有效重构航迹图像中的缺失区域。需要说明的是,MAN与CANet方法所使用的训练策略、损失函数与训练参数均与本文方法相一致。
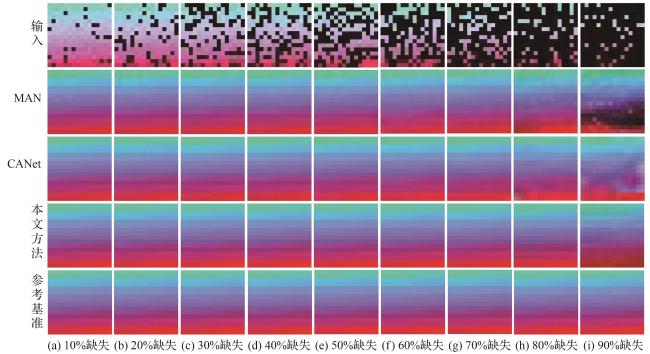
具体而言,针对输入图像缺失率达10%时,MAN方法的重建结果中,缺失区域未能得到精确填充,出现较为明显的伪影现象;随着缺失率逐步增加,伪影数量显著增多,并在处理90%缺失率输入时,导致大面积重建失败。这主要是因为MAN方法所采用的注意力机制仅关注通道间的动态关联,而忽略了像素间依赖关系,该关系对于捕捉航迹数据的时空连续性至关重要,从而导致重建性能不足。相比之下,CANet模型通过Transformer的自注意力机制实现了对航迹数据重建的整体改进,其重建图像在多数情况下优于MAN方法;然而,当输入图像缺失率超过80%时,CANet重建结果仍表现出大范围伪影和浅色板块问题,这表明单纯依赖自注意力机制而未充分考虑强化局域特征提取的局限性,无法有效应对高缺失率下的航迹转换图像修补。值得注意的是,本文方法在重建图像的色彩一致性和空间连续性方面,展现出与基准图像更高的相似度;即使在输入缺失率高达80%的情况下,重建结果也未出现明显的伪影。基于这些观察,本研究得出以下关键结论:首先,证实了“民航航班轨迹转换图像具备色彩分布同构性”的理论假设,为回归模型在航迹数据插补中的应用提供了坚实基础;其次,与通用图像修补方法相比,本文方法在针对航迹转换图像的重建任务中表现出显著优势,突显了其架构设计的有效性;最后,揭示了模式回归类方法重建精度会随缺失率上升而衰减的趋势,但本文方法的重建结果相对基准参考图像仍保持良好的收敛特性。
此外,为进一步量化评估重建性能,本研究采用峰值信噪比(PSNR)和结构相似性指数(SSIM)作为客观指标,对测试集中所有包含缺失区域的彩色航迹图像及其重建图像(共计112 590幅)进行了全面分析。如表4所示,本文方法在不同缺失率子集下的重建图像表现优于MAN和CANet方法,定量结果与主观分析趋势一致;特别是在缺失率70%及以下的条件下,PSNR值稳定在38.9 dB以上,SSIM值维持在0.983 6以上,这有力验证了本文方法在处理缺失航迹数据重建任务中的技术可行性。
表4 基于SSIM、PSNR的各方法重建航迹图像定量对比Table 4 Quantitative comparison of reconstructed trajectory images based on SSIM and PSNR metrics |
| 子集类型 | 图像数量 | 输入图像 | MAN重建图像 | CANet重建图像 | 本文方法重建图像 | ||||
|---|---|---|---|---|---|---|---|---|---|
| SSIM | PSNR/dB | SSIM | PSNR/dB | SSIM | PSNR/dB | SSIM | PSNR/dB | ||
| 10%缺失率 | 11 259 | 0.648 7 | 27.375 8 | 0.921 2 | 35.635 7 | 0.982 1 | 39.337 0 | 0.999 8 | 48.503 4 |
| 20%缺失率 | 11 259 | 0.599 5 | 26.869 0 | 0.906 7 | 32.278 4 | 0.980 0 | 38.954 2 | 0.999 7 | 48.496 4 |
| 30%缺失率 | 11 259 | 0.554 1 | 24.551 1 | 0.894 7 | 32.038 0 | 0.959 8 | 37.088 8 | 0.999 2 | 48.166 2 |
| 40%缺失率 | 11 259 | 0.511 3 | 23.001 9 | 0.864 7 | 30.829 5 | 0.927 8 | 35.685 7 | 0.999 1 | 47.539 0 |
| 50%缺失率 | 11 259 | 0.462 4 | 21.200 2 | 0.840 5 | 29.826 4 | 0.901 0 | 32.181 5 | 0.999 0 | 47.141 4 |
| 60%缺失率 | 11 259 | 0.407 0 | 19.244 4 | 0.789 2 | 28.883 8 | 0.886 7 | 31.020 0 | 0.992 0 | 42.735 6 |
| 70%缺失率 | 11 259 | 0.358 3 | 16.871 2 | 0.752 1 | 28.060 4 | 0.857 0 | 29.773 4 | 0.983 6 | 38.921 6 |
| 80%缺失率 | 11 259 | 0.317 7 | 15.401 6 | 0.694 7 | 27.998 6 | 0.805 3 | 29.266 2 | 0.902 4 | 32.668 9 |
| 90%缺失率 | 11 259 | 0.293 9 | 13.134 8 | 0.659 7 | 27.560 8 | 0.767 8 | 28.003 4 | 0.851 2 | 29.605 9 |
4.2 先进性测试
在先进性测试实验中,本研究以2022年7月25日美国联合航空UAL1667航班的运行轨迹作为测试样本,从测试集中随机抽取,针对不同缺失率场景开展对比分析。
如图9所示,通过可视化比较基准方法与本文提出的方法在轨迹重建中的表现,得出以下4方面的结论。
首先,三次样条插值法(CSI)受限于其统计推断的理论基础,在捕捉时空相关性方面存在显著不足。尽管该方法重建的轨迹整体趋势与基准数据保持一致,但其对噪声点的高敏感性导致在各类缺失率场景下均产生伪轨迹现象,限制了其应用效果。
其次,SA-AEGAN方法通过结合自注意力的对抗生成机制优化了轨迹的连续性,然而其重建精度存在系统性偏差。为确保轨迹的合理性,该方法牺牲了插补精度,这与其对抗生成网络注重潜在分布拟合而非精确确定性映射的特性密切相关。
基于Transformer架构的多变量时间序列插补网络(MTSIT)与成对Transformer插补网络(DTIN)在低缺失率场景下展现出较为优异的插补性能。然而,随着数据缺失率的升高,两者的插补结果表现出显著的数值波动加剧趋势,难以精确拟合真实航迹数据。这一现象主要归因于Transformer模型在设计上更倾向于捕捉长程时空依赖关系,而对航迹数据中至关重要的局域特征提取并未强化关注。
相比之下,本文提出的方法通过多尺度架构动态调整输入数据尺度,不仅有效提取全局时空特征,还在浅层信息流中强化了局域特征的建模,从而实现重建精度与轨迹合理性的协同优化。主观评估结果显示,本文方法重建的轨迹与基准数据高度吻合,充分验证了其在技术性能上的优越性。然后,本研究通过均值误差(MEAN)和标准差(SD)2项统计指标,系统评估了各方法在航迹数据重建任务中对经度、纬度、高度及实际距离的误差表现。如表5所示(各缺失率子集中的最佳重建结果以粗体标注,次佳结果以下划线标示),分析结果揭示了以下关键发现。
表5 对测试集中10%~90%缺失数据率下不同方法的轨迹重建结果进行对比Table 5 Comparison of different methods for reconstructing trajectories with multiple missing data rates (10%-90%) in the test set |
| 方法名称 | 评价指标 | 缺失率 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 10% | 20% | 30% | 40% | 50% | 60% | 70% | 80% | 90% | ||
| CSI | /(°) | 0.201 | 0.202 | 0.202 | 0.203 | 0.203 | 0.204 | 0.209 | 0.211 | 0.243 |
| /(°) | 0.206 | 0.207 | 0.208 | 0.208 | 0.209 | 0.210 | 0.214 | 0.218 | 0.254 | |
| /m | 243.6 | 244.1 | 224.9 | 246.0 | 247.5 | 249.9 | 259.1 | 274.7 | 352.8 | |
| /m | 18 826.9 | 18 844.1 | 18 890.9 | 18 931.5 | 19 023.6 | 19 084.1 | 19 509.7 | 19 870.2 | 23 037.8 | |
| /(°) | 0.095 | 0.099 | 0.102 | 0.106 | 0.110 | 0.117 | 0.143 | 0.147 | 0.249 | |
| /(°) | 0.097 | 0.100 | 0.104 | 0.108 | 0.112 | 0.119 | 0.145 | 0.154 | 0.265 | |
| /m | 217.0 | 219.7 | 223.4 | 227.3 | 233.0 | 243.2 | 286.6 | 325.5 | 530.8 | |
| /m | 8 782.5 | 9 091.6 | 9 435.5 | 9 758.2 | 10 151.7 | 10 789.1 | 13 215.9 | 13 879.9 | 23 859.5 | |
| SA-AEGAN | /(°) | 0.026 | 0.046 | 0.064 | 0.081 | 0.102 | 0.131 | 0.183 | 0.329 | 0.717 |
| /(°) | 0.028 | 0.050 | 0.069 | 0.088 | 0.110 | 0.141 | 0.203 | 0.365 | 0.780 | |
| /m | 53.3 | 81.9 | 105.0 | 130.6 | 164.3 | 214.7 | 345.3 | 795.6 | 2 259.5 | |
| /m | 2 587.9 | 4 596.9 | 6 344.1 | 8 080.4 | 10 086.1 | 12 992.9 | 18 676.8 | 33 614.4 | 73 064.9 | |
| /(°) | 0.095 | 0.118 | 0.131 | 0.142 | 0.152 | 0.174 | 0.228 | 0.361 | 0.615 | |
| /(°) | 0.101 | 0.127 | 0.140 | 0.152 | 0.164 | 0.187 | 0.248 | 0.395 | 0.656 | |
| /m | 204.7 | 227.5 | 237.6 | 250.9 | 274.4 | 319.4 | 458.2 | 845.9 | 1 641.4 | |
| /m | 9 040.6 | 11 230.4 | 12 420.3 | 13 446.8 | 14 456.4 | 16 458.3 | 21 649.7 | 33 971.6 | 54 604.6 | |
| MTSIT | /(°) | 0.012 | 0.018 | 0.023 | 0.027 | 0.033 | 0.044 | 0.075 | 0.187 | 0.626 |
| /(°) | 0.014 | 0.022 | 0.028 | 0.035 | 0.045 | 0.061 | 0.095 | 0.195 | 0.589 | |
| /m | 32.9 | 56.3 | 76.1 | 97.5 | 121.4 | 159.8 | 239.5 | 481.65 | 2 051.1 | |
| /m | 1 586.6 | 2 671.3 | 3 621.3 | 4 649.1 | 5 695.8 | 7 320.5 | 11 343.2 | 25 583.9 | 59 708.4 | |
| /(°) | 0.051 | 0.059 | 0.061 | 0.067 | 0.074 | 0.089 | 0.144 | 0.247 | 0.548 | |
| /(°) | 0.057 | 0.066 | 0.069 | 0.077 | 0.088 | 0.104 | 0.150 | 0.259 | 0.579 | |
| /m | 134.7 | 166.2 | 182.3 | 198.9 | 215.5 | 246.1 | 328.9 | 570.7 | 1 530.1 | |
| /m | 5 788.9 | 6 832.0 | 7 541.7 | 8 796.2 | 9 168.1 | 10 352.2 | 14 622.6 | 28 356.5 | 51 858.8 | |
| DTIN | /(°) | 0.007 | 0.013 | 0.018 | 0.023 | 0.028 | 0.041 | 0.066 | 0.138 | 0.453 |
| /(°) | 0..007 | 0.013 | 0.020 | 0.025 | 0.032 | 0.046 | 0.073 | 0.146 | 0.471 | |
| /m | 18.1 | 35.7 | 51.8 | 67.7 | 87.2 | 115.5 | 163.7 | 369.1 | 1 557.5 | |
| /m | 962.7 | 1 710.6 | 2 364.9 | 3 224.6 | 4 310.9 | 5 943.3 | 9 478.2 | 18 854.4 | 47 973.4 | |
| /(°) | 0.028 | 0.041 | 0.048 | 0.057 | 0.070 | 0.100 | 0.143 | 0.241 | 0.522 | |
| /(°) | 0.031 | 0.045 | 0.053 | 0.065 | 0.077 | 0.105 | 0.146 | 0.236 | 0.523 | |
| /m | 78.6 | 110.1 | 129.6 | 144.7 | 165.4 | 202.1 | 268.6 | 401.1 | 1 589.9 | |
| /m | 3 556.4 | 4 534.4 | 5 189.1 | 6 576.9 | 8 079.0 | 9 845.1 | 13 125.6 | 24 944.0 | 46 023.7 | |
| 本文方法 | /(°) | 0.006 | 0.012 | 0.017 | 0.021 | 0.026 | 0.033 | 0.048 | 0.100 | 0.392 |
| /(°) | 0.006 | 0.013 | 0.019 | 0.024 | 0.030 | 0.038 | 0.051 | 0.095 | 0.400 | |
| /m | 14.8 | 28.6 | 41.7 | 54.0 | 68.2 | 88.3 | 128.3 | 255.7 | 991.8 | |
| /m | 658.7 | 1 226.1 | 1 722.3 | 2 186.3 | 2 680.7 | 3 422.7 | 4 846.8 | 9 449.4 | 38 429.4 | |
| /(°) | 0.027 | 0.036 | 0.041 | 0.045 | 0.049 | 0.055 | 0.071 | 0.125 | 0.410 | |
| /(°) | 0.029 | 0.039 | 0.045 | 0.050 | 0.054 | 0.061 | 0.077 | 0.128 | 0.428 | |
| /m | 63.6 | 84.5 | 98.7 | 109.1 | 119.9 | 140.1 | 195.6 | 393.5 | 1 405.1 | |
| /m | 2 632.1 | 3 435.4 | 3 918.1 | 4 368.7 | 4 692.9 | 5 284.5 | 6 661.8 | 11 406.7 | 37 849.8 | |
首先,基于终端观测点进行缺失区间估计的统计学方法三次样条插值(CSI)在缺失率低于90%的实际场景中表现出显著的重建性能局限。其根本原因在于该方法对数据分布先验假设的过度依赖,限制了其在复杂数据场景下的适应性。
其次,SA-AEGAN在缺失率低于80%的航迹重建任务中,相较于CSI方法,表现出更优的MEAN指标。然而,其SD指标显著高于CSI方法,表明生成对抗网络框架在要求精确点对点回归的场景中存在固有的局限性,导致重建结果的稳定性不足。
此外,在极端缺失率(90%)条件下,CSI方法通过先验约束实现的航迹重建性能优于本文方法及其他对比方法。这一现象表明,基于模式回归的统计方法对已知数据规模的依赖性较强,在数据极度稀疏时表现出一定的优势。
进一步地,基于Transformer架构的两种插补方法(MTSIT与DTIN)虽插值结果优于SA-AEGAN方法,但由于其设计上未强调关注局域特征提取,导致标准差结果偏高。这一结果与主观评测中的轨迹拟合偏差较大现象一致,反映出其难以精确重现真实航迹的局限。
相比之下,本文提出的方法在10%至80%缺失率区间内,实现了均值误差与标准差指标的协同优化,性能显著超越所有对比方法。这一结果充分验证了所提方法在处理复杂缺失场景时的技术优越性,展现了其在全局时空特征提取与局域特征建模之间的有效平衡。
4.3 消融实验
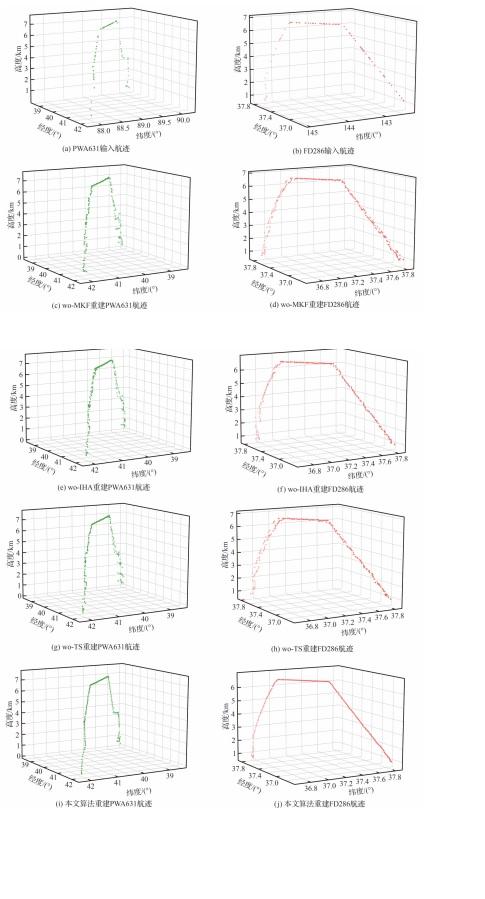
在消融实验设计方面,本研究从测试集中随机选取泰亚航空 FD286 与太平洋西部航空 PWA631 两条航迹作为测试样本,分别在70%数据缺失场景下开展对照实验。如图10所示的航迹重建可视化对比表明:首先,通过本文提出的训练策略引导模型更加注重学习缺失区域的时空特征,显著提升了重建轨迹的准确性;其次, MKF模块通过多感受野融合机制,成功捕获航迹时空特征的全局关联性;再者,IHA模块通过时空双通道注意力的有效融合,进一步提升模型对复杂时空依赖性的拟合能力;最后,集成MKF、IHA模块与改进训练策略的本文完整方法所重建缺失航迹准确性最高,充分说明本文所设计的相关模块与训练策略的有效性。定量分析显示(如表6所示),当逐步引入本文各创新模块与训练策略时,插补航迹的准确性不断提升,进一步验证本文方法回归模型中所提出的各构件的有效性。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
图 10 PWA 631与FD 286航班在70%缺失率下的轨迹插补结果对比分析Fig.10 Comparison of trajectory imputation results: PWA 631 and FD 286 with 70% data loss |
表6 SSIM、 PSNR、 MEAN和SD指标分别对基于不同模型配置重建的全部测试集轨迹进行评估的平均值对比Table 6 Mean-values comparison of SSIM, PSNR, MEAN, and SD for reconstructed trajectories across all test sets under different model configurations |
| 模型配置 | 数据数量 | 模块/策略选用 | 重建航迹图像Traj-images | 重建轨迹 | ||||
|---|---|---|---|---|---|---|---|---|
| MKF | IHA | TS | /dB | |||||
| wo-MKF | 112 590 | × | √ | √ | 0.955 9 | 39.651 3 | 10 690.20 | 16 438.19 |
| wo-IHA | 112 590 | √ | × | √ | 0.937 6 | 37.063 1 | 13 334.36 | 18 957.75 |
| wo-TS | 112 590 | √ | √ | × | 0.831 5 | 30.819 5 | 14 892.19 | 16 840.29 |
| 本文方法 | 112 590 | √ | √ | √ | 0.969 5 | 42.419 8 | 7 187.27 | 8 916.67 |
5 结 论
1) 通过有效性分析实验发现:基于“不同航班的航迹数据在宏观层面应存在相似的时空变化模式”,构建合理回归模型的本文方法,与通用的图像修补方法相比,其补全的航迹图像在色彩一致性和空间连续性两个维度均与参考基准图像呈现更为显著的趋同性,基于SSIM与PSNR评价指标相较于原始输入图像分别提升122.7%与107.3%,充分验证本文方法的技术可行性。
2) 先进性测试实验结果表明:对于缺失率低于90%(涵盖绝大多数实际应用场景)的航迹插补任务,本文方法在重建航迹点空间位置的平均误差方面,相较于民航四维航迹插补领域的传统三次样条插值法CSI、基于自注意力机制的时间序列生成网络SA-AEGAN,以及2类主流Transformer-based插补方法:MTSIT和DTIN,分别实现了83.1%、73.3%、47.1%和31.8%的性能提升;在标准差指标上,分别提升了52.2%、68.4%、44.0%和34.2%。充分验证了本文方法在处理民航航迹复杂缺失场景时的技术优越性。
3) 通过消融实验发现:通过逐步引入本文方法各创新模块与训练策略时,重建航迹的准确性不断提升,充分验证本文方法回归模型中所提出的多卷积融合模块、改进型混合注意力模块,基于自适应权重分配的全局-局部特征融合训练策略的有效性。
4) 尽管本文方法在处理复杂场景下民航缺失航迹插补任务中展现出较高效率,但针对80%缺失率的航迹补全,其重建精度平均误差仍高达9 449.4 m;此外,在90%缺失率的极端情况下,本文方法的重建精度平均误差较传统CSI方法下降了66.8%。这些现象揭示了以下关键问题:第一,相较于传统的统计学方法,基于模式回归的方法对已知数据规模具有更强依赖性,导致在高缺失率场景下性能显著降低;第二,模式回归类方法依赖于“不同航班航迹数据在宏观层面存在相似的时空变化模式”的假设,然而实际民航运行中,临时天气变化(如雷雨或大气环流)以及突发任务等干扰,易造成绕飞等问题,可能使该假设失效,从而难以精确捕捉特定飞行状态的动态变化;第三,本文提出的回归模型在架构设计上仍存在优化空间。基于上述分析,未来研究将重点开展以下改进工作:首先,对飞行航迹进行更细致的类别划分,并为每个类别构建针对性的模式回归模型,以实现对丢失航迹的更高精度填补;其次,进一步剖析民航运行中的潜在先验态势特征,并优化回归模型的架构设计,从而提升其整体适用性和鲁棒性。
5) 鉴于本文方法通过将传统时空序列数据转化为图像表征,实现了对原数据中所蕴含复杂时空关联的有效提取,在未来的研究中,会持续探索将表征形式转化思想应用于动态流量推演系统、多机协同冲突解脱机制等其他TBO智能化应用的可能。