
高超声速飞行器[1-3]一般指在20~100 km临近空间以Ma≥5速度飞行的飞行器,其革命性的速度优势正深刻重塑未来空天格局。随着各国战略投入的持续加大,该技术展现出军民两用的广阔前景:在军事领域可实现“一小时全球打击”的战略威慑[4],在民用航天领域则有望催生高超声速客机[5-6]与可重复使用空天飞行器[7-10]。
然而,高超声速飞行器的工程化应用仍面临严峻挑战,尤以气动外形设计为关键瓶颈。传统外形在高速飞行时面临激波强度剧增、波阻过大导致的“升阻比屏蔽[11]”效应问题。乘波体[12-15]凭借其独特的激波附体特性,理论上可在高马赫数下实现优异升阻比[16],被视为最具潜力的解决方案。但高超声速飞行涵盖Ma=0~10+的极端宽速域工况,现有乘波体存在固有缺陷:其性能随马赫数变化呈现剧烈非线性衰减,与宽速域稳定飞行的需求形成尖锐对立。这种矛盾在工程实践中表现为两个突出难题:① 不同飞行阶段需要截然不同的最优外形;② 推进系统与气动外形难以维持高效耦合。
为此,各国学者对宽速域[17-18]乘波体设计方法开展了大量的研究工作,目前关于宽速域乘波体的研究主要分为两个方向。一是高低速飞行时均有优良的性能。例如,刘传振等[19-22]根据密切锥方法中设计曲线与平面形状之间的设计几何关系,提出了定平面形状和双后掠乘波体概念,利用涡波提升乘波体低速性能。在此基础上,李珺等[23]发展了基于投影法的双后掠乘波体设计方法,并分析了第1后掠角和第2后掠角的大小对高低速气动性能的影响;陈树生等[24-25]提出了乘波体与箭形翼融合的宽速域飞行器气动布局方案,并使用基于全局/梯度优化方法对该宽速域构型的布局参数和剖面形状进行了优化,显著地提高了构型高低速气动性能。
二是在宽马赫数范围内保证优良的气动性能。构型上的串、并联设计方法是能够实现宽速域性能的一种设计方法。例如王发民等[26-28]依据高、低速乘波布局各自气动特性,提出了两级串联的高超声速飞行器布局方案,飞行器前部采用以高速乘波体(Ma=6)、后半段采用低速乘波体(Ma=3),采用几何拼接的方式将两个飞行器结合,风洞试验结果表明了该乘波飞行器在亚跨声速、超声速和高超声速均具有良好的气动特性。李世斌等[29]提出了一种并联式乘波体构型,通过组合两种不同马赫数的基准流场,将两种马赫数设计点的前缘线并联组合,之后通过流线追踪技术获得并联式乘波体,并分析了该构型在宽速域范围内的气动性能,获得了气动特性随攻角来流的规律。但是,串、并联乘波体在设计中存在人为因素较多、重复性差且设计难以参数化等问题。之后,张天天等[30]在两级并联乘波体的基础上,提出了沿展现变马赫数设计思想,在不同的马赫数流场中生成不同的流线,使乘波体在设计马赫数范围内均有部位保持乘波特性。该方法虽实现了宽速域性能的提升,却牺牲了容积。刘珍[31]基于吻切锥理论,开展了展向变激波角乘波体的研究,通过改变每个吻切面内锥型流场的激波角生成不同的流线。该方法提升了乘波体设计状态下不同攻角条件的升阻比,但其非设计状态性能仍有待验证。孟旭飞等[32-33]提出基于可变马赫数流场的定平面形状乘波体设计方法,发现在高超声速阶段,与容积、同样平面形状的固定马赫数乘波体相比,可变马赫数乘波体的宽速域升、阻力性能没有明显优势。
为突破现有技术难点,首先,基于展向多参数耦合调控方法,考虑兼顾乘波体容积和气动性能,发展一种基于吻切理论的展向多参数可变乘波体设计方法;然后,针对典型飞行Ma范围,进行乘波体设计,并采用数值模拟手段对该设计方法进行验证;最后,通过与传统定参数乘波体气动性能和几何特征的对比,探索新方法在流场调控与性能提升方面的机制。
1 设计方法
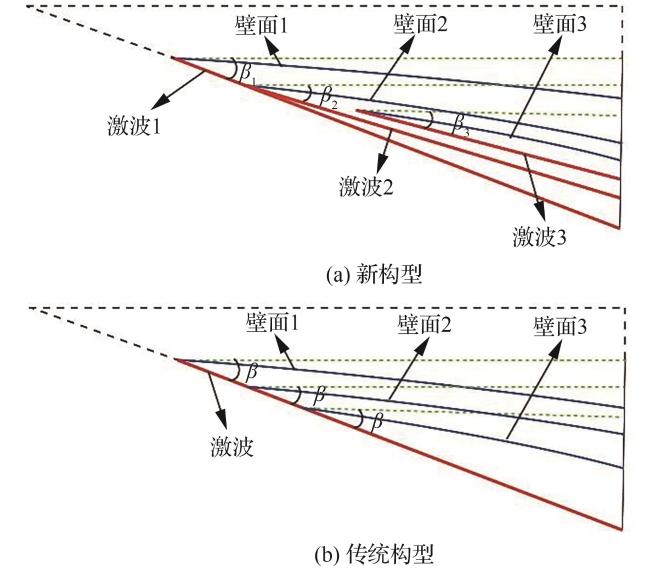
在吻切乘波体基准流场的设计中,可通过给定前缘激波型线来求解基准流场。需要指出的是,设计参数的差异会导致生成基准流场特征的不同,其中激波角β与马赫数作为关键参数,将显著影响最终乘波体的气动外形与性能表现。方法核心如图1所示,将马赫数与激波角作为设计变量,通过在各吻切平面内配置不同的参数组合来实现设计。
为确保几何连续性,特别约束相邻吻切平面间的马赫数与激波角变化满足连续条件。基于此,采用逆特征线流线追踪技术在每个吻切平面生成与参数相应的流线,最终通过三维放样技术将这些离散流线重构为完整的乘波面。具体设计过程如下。
1) 给定展向马赫数和激波角分布规律
根据设计需求,设计沿展向每个吻切面内的马赫数和激波角。如图2所示,图中F cc为乘波体底部截面的上表面后缘线,I cc为激波底部型线,沿展向的马赫数和激波角变化曲线均设计为四点三阶贝塞尔曲线:
式中: 、 、 、 为三阶贝塞尔曲线的控制点;t为曲线绘制的归一化进度。
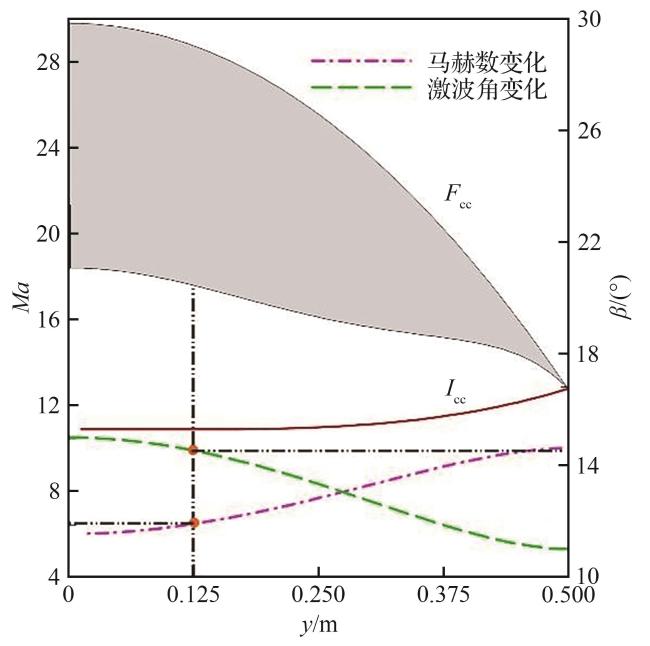
该曲线本质上是空间三次曲线,其几何特性不受坐标方向约束,仅由控制节点决定,因而可灵活调节起始点切线方向及空间曲率变化趋势。为确保乘波体几何光滑性及流场连续性,需满足以下约束条件:① 贝塞尔曲线在对称面附近保持连续相切;② 贝塞尔曲线在端面曲率变化较小。依据文献[29,31-33]可知,相较于对称面到端面马赫数递减的乘波体,对称面到端面马赫数递增的乘波体具有更高升阻比。相较于对称面到端面激波角数递增的乘波体,对称面到端面激波角递减的乘波体具有更高升阻比。考虑工程实际需求,兼顾升阻比和容积,在展向方向上,对称面部分给定较大的激波角,以此来获得较大容积。同时端面部分,采用较小激波角生成较薄的乘波体,以此获得高升阻比。此外,高马赫数基准流场生成的乘波构型厚度相比于低马赫数构型更薄。因此,在展向方向上,对称面到端面的马赫数设计为低值到高值,其变化曲线的控制点为 (0,6)、 (0.2,6)、 (0.375,10)和 (0.5,10)。而对称面到端面的激波角设计为高值到低值,其变化曲线的控制点为 (0,15)、 (0.2,15)、 (0.375,11)和 (0.5,11)。
2) 给定乘波体的基本型线
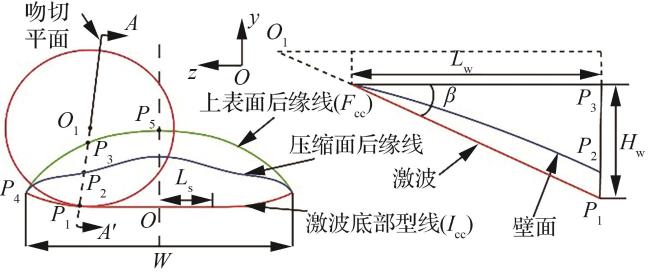
基本型线包括F cc和I cc,如图3所示,上表面底部型线设计为二次曲线:
激波底部型线为
中间部分设计为直线,使进气道入口均匀,其外缘部分设计为指数函数,以提高容积。式(2) 和式(3) 中的系数可以根据几何关系求得:
式中:W为乘波体宽度;L为乘波体长度; 为激波底部型线上直线段的长度; 为对称面上基准流场的激波角; 为 点的坐标值; 为上表面底部型线在 点切线的角度。
3) 吻切平面内基准流场求解
如图3所示,在乘波体底部平面上,对激波底部型线进行离散获得一系列离散点,由其中任意点可获得过该点的吻切面斜率和曲率圆。截短参考锥和截短吻切激波的轴线都过该曲率圆圆心,激波底部离散点和曲率圆圆心的连线与给定乘波体上表面底部型线相交。由此,可获得当地吻切平面内F cc与I cc的间距 ,在吻切平面内由该交点做平行于子午面参考锥轴线的直线与子午面参考锥相交,此交点即吻切平面内乘波体前缘点,依据式(10) 可得前缘点坐标:
式中: 为当地吻切流场的长度。
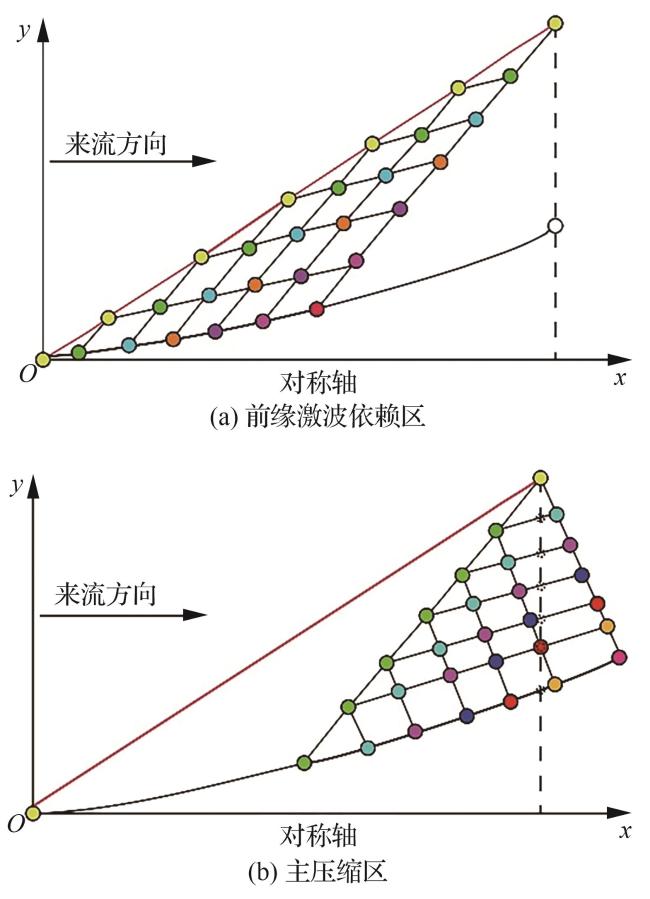
再由吻切平面内乘波体前缘点出发,采用逆特征线法流线追踪技术,精确追踪至底部截面的后缘,获得吻切平面内的基准流场。逆特征线法流线追踪不同于传统流线追踪,其无线性插值,没有二次精度损失。吻切平面内的基准流场求解过程如图4所示,前缘激波依赖区由给定的激波型线出发通过逆特征线内点单元推进求解。主压缩区给定壁面流动方向角变化规律,使用壁面点单元和内点单元求解,壁面流动方向角设计为二次函数曲线。
4) 生成乘波体
将每个吻切平面的前缘点连线组成前缘线,将后缘线连线组成下表面底部型线,各吻切平面内下表面流线放样生成下表面,上表面流线组成上表面,上表面底部型线和下表面底部型线组成底面,上、下表面和底面共同组成展向多参数可变的宽速域吻切乘波体。沿展向马赫数和激波角同时可变的乘波体设计方法可实现宽速域飞行时每个吻切面均有部分乘波,改善乘波体宽速域气动性能,同时兼顾容积,进而可以根据任务需求调整乘波体容积分布。
依据上述提出的展向多参数可变的乘波体设计方法,开展新型乘波体设计,具体设计参数为L=2 000 mm、W=500 mm、 =125 mm;设计马赫数6、激波角15°,至设计马赫数10、激波角11°。端面部分吻切平面对应高马赫数、小激波角,对称面部分的吻切平面对应低马赫数、大激波角。子午面基准流场壁面流动方向角分布规律设计为先增再减。图5展示了展向多参数可变的吻切乘波体的几何模型。
2 设计方法数值模拟验证
2.1 数值模拟方法
2.2 设计方法验证
为精细模拟乘波体激波结构,对模型进行结构化网格划分,并在激波面附近进行网格加密,采用无黏流场数值计算,假定来流气体为理想气体,通量离散为迎风AUSM格式。图6展示了新构型子午面内壁面的二维模拟计算网格。
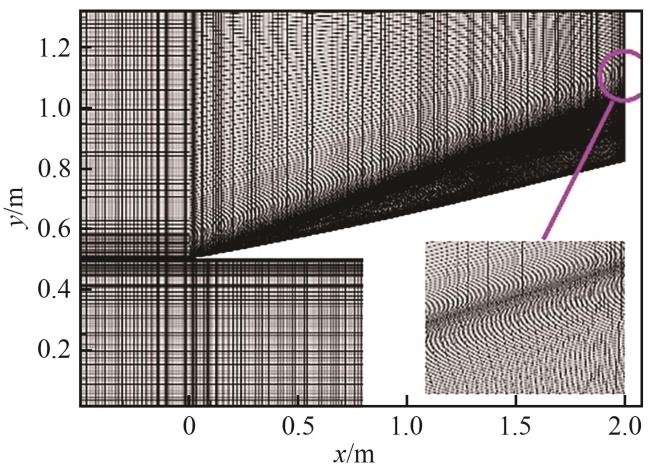
图7给出了新构型子午面内壁面型线二维数值模拟与理论解的对比曲线,图中“Code”表示设计程序输出的结构,“CFD”表示数值模拟的结构。数值模拟的激波位置与理论解的激波位置重合,压强p与理论也基本一致。
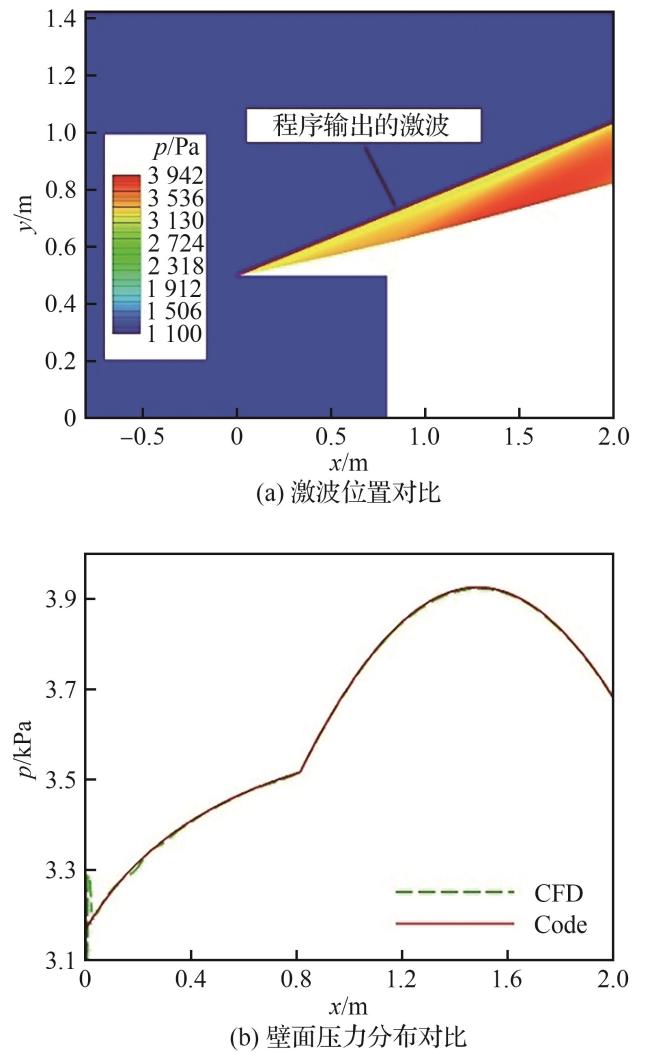
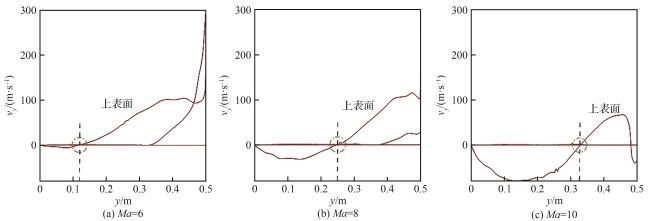
图8展示了展向多参数可变吻切乘波体在不同条件下(高度H=30 km,Ma=6.0,8.0,10.0,迎角AOA=0°)的底部马赫数和对称面密度ρ等值线图,新构型的流场参数沿流向与展向均分布不均,展向多参数可变吻切乘波体在Ma=6时,边缘出现了部分的溢流现象,激波位置稍微偏离了理论设计的位置。随着马赫数的增大,溢流现象逐渐降低,激波向内偏移,边缘处无法形成高压区,进而新构型的乘波特性降低。为了更进一步地研究新构型流场结构,图9给出了新构型在不同马赫下不同截面的压力分布,在计算Ma=6的压力分布时,新构型沿流向压力先增再减,这与基准流场设计特点保持一致;新构型沿展向压力分布不均,先小幅增加再大幅减少,每个横截面上端面的压力小于对称面区域。展向激波角的减小使激波强度降低,进而在不同吻切平面内形成压差,而展向马赫数增大会使激波强度增加。在激波角和马赫数共同作用下沿展向压力分布呈现先小幅增加再大幅衰减趋势。空气受膨胀波影响高压区流向低压区,形成双向横向流动,进而导致新构型三维数值模拟的激波位置偏离理论位置。同时随着马赫数的增大,新构型的展向压差增加,双向横向流动更加明显。图10给出了展向多参数可变吻切乘波体在不同马赫数条件下的底部横向速度vy 曲线,随着马赫数的增加,横向速度方向分界点向展向方向移动,双向横向流动现象加剧。
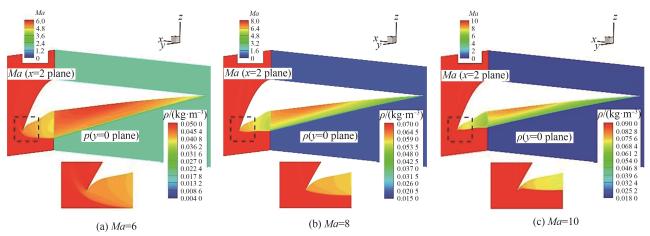
图 8 不同马赫数条件下新型乘波体底部马赫数和对称面密度的等值线图Fig.8 Contour plots of Mach number in base plane and density in symmetry plane for novel waverider at different Mach number conditions |
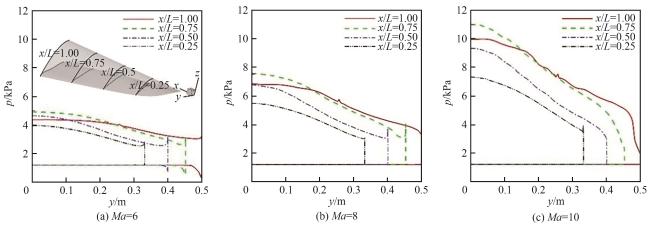
图 9 不同马赫数条件下新型乘波体不同截面的压力分布Fig.9 Pressure distributions at different cross-sections of novel waverider under different Mach number conditions |
3 新型宽速域乘波体与传统乘波体的比较
在保持乘波体的容积、长和宽相同的情况下,对比展向多参数可变吻切乘波体和传统定参数吻切乘波体的几何特征和气动性能参数。为确保容积一致,使用积分原理计算乘波体容积,进而便于获得与展向多参数可变吻切乘波体具有相同容积的定马赫数定激波角吻切乘波体,并相应地确定其设计马赫数与激波角。展向多参数可变的吻切乘波体被命名为W6-10_15-11,与其相同容积的定马赫数定激波吻切乘波体分别被命名为W6_16.3、W8_14.3和W10_13.2。4种乘波体的设计参数对比如表1所示,其中V为乘波体容积,S wet为浸润表面积,η为容积率(η=V 2/3/S wet),S p和S b分别为乘波体的水平投影面积和底部面积。
表1 吻切乘波体设计参数与几何特征的对比Table 1 Comparison of design parameters and geometric features of osculating waveriders |
| 构型 | 设计参数 | 几何特征 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Ma | /(°) | L/m | W/m | S p /m2 | S b /m2 | S wet /m2 | V/m3 | η | |
| W6-10_15-11 | 6~10 | 15.0~11.0 | 2 | 0.5 | 0.760 | 0.122 00 | 2.254 | 0.093 | 0.091 1 |
| W6_16.3 | 6 | 16.3 | 2 | 0.5 | 0.674 | 0.119 02 | 2.106 | 0.093 | 0.097 5 |
| W8_14.3 | 8 | 14.3 | 2 | 0.5 | 0.676 | 0.119 06 | 2.031 | 0.093 | 0.102 0 |
| W10_13.2 | 10 | 13.2 | 2 | 0.5 | 0.677 | 0.118 09 | 1.944 | 0.093 | 0.101 0 |
3.1 几何特征对比
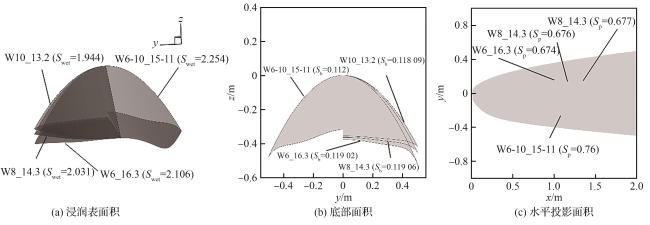
图11展示了沿展向多参数可变的吻切乘波体与3种定马赫数定激波角吻切乘波体几何特征的对比。这里保持容积、长和宽不变。4种乘波体的前缘线、上表面后缘线和下表面的后缘线均不同。展向多参数可变的吻切乘波体与定参数吻切乘波体相比,外形更扁平,前缘各横截面内的展长更大,水平投影面积更大。对于压缩面的后缘线,W6-10_15-11在对称面区域是在W6_16.3之上,这是因为两者对称面的设计马赫数相同,而W6-10_15-11在此区域的激波角较小。W6-10_15-11中间段区域绝大部分介于W6_16.3和W10_13.2之间,且接近W8_14.3。这是因为此段区域的马赫数和激波角与W8_14.3接近。4种乘波体的底部投影的面积、水平投影的面积、浸润面积、容积率如表1所示,W6-10_15-11外形的底部投影面积最小,而水平投影面积和浸润面积最大。其原因是展向变马赫数和变激波角会在容积不变的情况下重新调整容积空间分布规律。与W6_16.3相比,新构型的水平投影面积增加约11.32%,底部投影面积增加约2.44%,容积率降低6.57%;与W8_14.3相比,新构型的水平投影面积增加约11.05%,底部投影面积增加约2.41%,容积率降低约10.12%;与W10_13.2相比,新构型的水平投影面积增加约10.92%,底部投影面积增加约3.20%,容积率降低约10.88%。
3.2 宽速域乘波特性对比
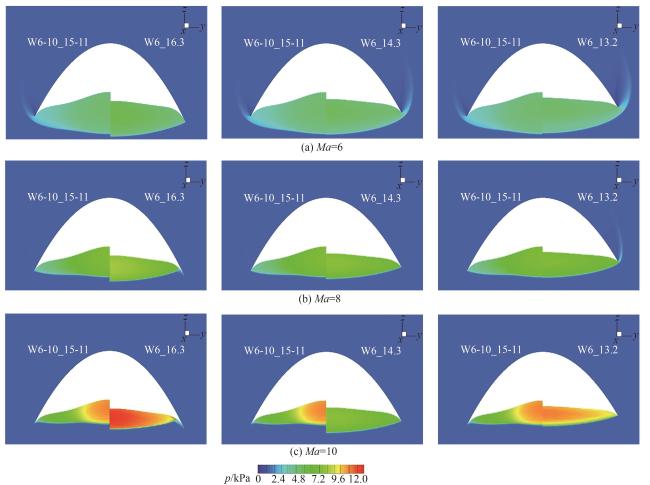
图12展示了4种乘波的底部截面压力等值线图对比,对于W6_16.3外形,随着马赫数的增大,激波强度逐渐增大,激波向内偏移,边缘处无法利用激波形成高压区,乘波特性降低。对于W8_14.3和W10_13.2外形,当计算马赫数小于设计马赫数时,激波向外偏离,边缘处出现溢流现象,溢流程度随着马赫数增大而降低。对于W6-10_15-11外形,展向马赫数和激波角变化共同作用改变压力分布,使压力分布不均匀形成了横向流动。在计算马赫数为6时,前缘有一小部分溢流现象,随着马赫数的增加溢流程度降低。与W6_16.3外形相比,新构型的压缩面在宽速域范围内均保持高压。与W10_13.2外形相比,新构型在宽速域范围内的溢流现象显著减少。与W8_14.3乘波体相比,新构型特性流场结构具有一定的相似度,但是新构型流场参数不均匀度更高,其原因是新构型对称面设计马赫数为6,端面的设计马赫数为10,展向马赫数和激波角分布规律采用的贝塞尔曲线,其中Ma=6,10所占比例有限,并且沿展向马赫数和激波角变化共同作用改变压力分布,使压力分布不均匀形成了横向流动。这一结果验证了变马赫数变激波角吻切乘波体能够在宽速域范围内保持乘波特性。
3.3 壁面压力分布对比
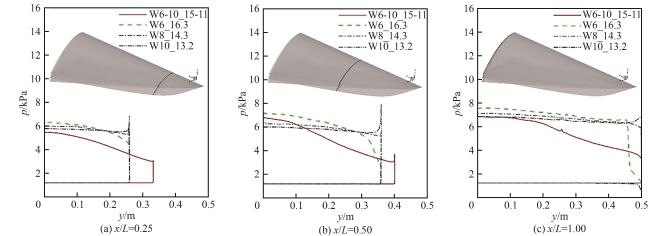
为定量对比分析展向多参数可变的吻切乘波体与定参数吻切乘波体展向的压力分布规律,给出4种乘波体在Ma=8时沿y方向不同位置处的压力分布曲线,其中x/L为各横截面相对乘波体长度的位置。由图13可知,各截面在前缘附近出现的压力骤增现象表明激波能较好贴附乘波体。在各横截面内,展向多参数可变的吻切乘波体和定参数吻切乘波体沿展向的压力分布趋势大体一致。对于沿流线的各截面,新构型展向压力下降幅度约45.24%、55.01%和51.27%,远远高于各定参数构型同横截面非聚变部分的压力下降幅度。在对称面上,新构型的压力增加幅度约为19.18%,也远高于各定参数吻切乘波体对称面增加的幅度。这说明展向多参数可变的吻切乘波体各方向的流场参数变化均剧烈,且程度均高于定参数吻切乘波体,并且其展向流动参数的变化幅度远高于流向。在各截面内,展向多参数可变的吻切乘波体与参数吻切乘波体的均有展向长度差,并且沿流向缩小,这说明了展向变马赫数变激波角设计方法会调整乘波体内部容积空间分布。
3.4 气动力对比
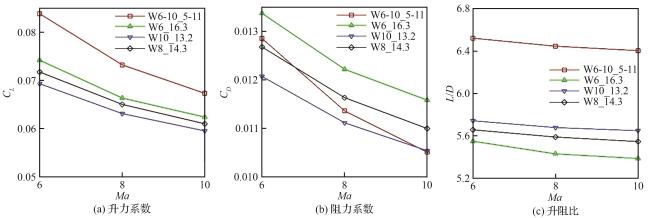
为更清晰地对比展向多参数可变的吻切乘波体与定参数吻切乘波体在宽速域范围内的气动性能差异,选取Ma=6, 8, 10飞行马赫数下的气动力数据进行对比分析。图14展示了展向多参数可变的吻切乘波体与定参数乘波体在攻角0°时气动力系数随着马赫数的变化,这里不考虑底阻。 与 分别是升力系数与阻力系数,L/D是升阻比,通过 计算数值。随着飞行马赫数的增大,展向多参数可变的吻切乘波体与定参数吻切乘波体的升力系数、阻力系数等无量纲量变化趋势一致,这是由于高超声速无黏流动满足马赫数无关原理。在宽速域(Ma=6~10)范围内,展向多参数可变的吻切乘波体的升力系数和升阻比远高于3种定参数乘波体,升力系数提高约17.01%,升阻比提高约12.63%;升阻比衰减率在1.8%以内。W6-10_15-11的阻力系数大部分介于W8_14.3和W10_13.2之间,在靠近Ma=6时W6-10_15-11阻力系数略高于W8_14.3。展向多参数可变的吻切乘波体沿展向马赫数和激波角同时改变,保证了每个马赫数都有与之对应吻切平面,使得乘波体在宽速域内都可以实现部分乘波。在一定的容积约束下,重新调整了乘波体内部容积空间的分布。这表明了在宽速域范围内,在等容积、等长、等宽的条件下,不考虑底阻,展向多参数可变的吻切乘波体的升阻比均高于定参数乘波体,具有更优异的气动性能,更适合宽速域飞行。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
4 结 论
基于吻切理论提出了一种展向多参数可变的乘波体设计方法,通过沿展向同时改变马赫数和激波角,实现了在高超声速阶段宽速域性能的提升。通过无黏数值模拟验证了设计方法的正确性,并与传统定参数乘波体进行了几何特征和气动性能的对比分析。主要结论如下:
1) 展向多参数可变乘波体通过贝塞尔曲线控制马赫数和激波角的连续变化,确保了宽速域范围内每个吻切平面内流场的部分乘波特性。数值模拟结果表明,设计方法可靠,该方法生成的乘波体压缩面流场分布不均匀,在宽速域范围(Ma=6~10)内均能保持良好的激波附体特性,升阻比衰减在1.8%以内,避免了传统乘波体在非设计点性能急剧恶化的问题。
2) 在等容积、等长和等宽条件下,与传统定参数吻切乘波体相比,展向多参数可变吻切乘波体的前缘平均展长更大,平面形状不同,水平投影面积平均增加约11.10%,底部面积平均增加约2.68%。尽管容积率降低约9.19%,但其内部容积分布可以依据设计需求更加合理调整,能够更好地满足工程任务需求。
3) 宽速域范围内,不考虑底阻,与不同平面形状、不同水平投影面积、等容积、等长和等宽的定参数外形相比,展向多参数可变吻切乘波体的升力系数和升阻比均显著高于定参数吻切乘波体,升力系数提高约17.01%,升阻比提高约12.63%,阻力系数介于不同设计点的传统定参数吻切乘波体之间,有效地提高了宽速域气动性能。