
1 算法模型
1.1 变量符号与类型
表1 符号定义与类型Table 1 Variable definition and types |
| 符号/单位 | 定义 |
|---|---|
| 区域内起降场总数 | |
| 起降场i与j所在地区道路拥堵系数之和 | |
| eVTOL i 经过起降场数量 | |
| eVTOL i 的展弦比 | |
| 起降场i可被服务的旅客数量 | |
| /(m·s-2) | eVTOL i 加速度 |
| 数量 | |
| /元 | eVTOL 运行成本 |
| 起降场i与j所在地区办公人口数量总和 | |
| 寄生阻力系数 | |
| 升力系数 | |
| 起降场i与j所在地区需求量总和 | |
| /km | i与j距离 |
| CNS 系统偏差 | |
| /km | eVTOL i 最大航程 |
| /(kW·h) | 能量 |
| e | 起降场可容纳同时起降eVTOL数量 |
| 个体 i的适应度 | |
| 优值系数 | |
| /N | eVTOL i 受力大小 |
| 起降场i 旅客数量随时间变化函数 | |
| /(m·s-2) | 重力加速度 |
| /m | 高度 |
| /m | eVTOL间安全距离 |
| 纬度 | |
| 经度 | |
| /(元·km-1) | 每千米维护成本 |
| /kg | eVTOL i 质量 |
| 在起降场 i 充电的eVTOL数量 | |
| eVTOL i 到达前, 已在(t-μ, t)时间段内抵达起降场 j 的eVTOL数量 | |
| 时隙数量 | |
| 奥斯瓦尔德效率因子 | |
| /(元·(kW·h)-1) | 电价 |
| /人 | eVTOL i抵达前起降场j已发送的旅客数量 |
| 个体i 被选择的概率 | |
| /人 | 起降场i 与 j 的旅客需求数量 |
| /kW | 充电功率 |
| /kW | 放电功率 |
| 参数为λ的泊松分布 | |
| /元 | eVTOL i 的购置费用 |
| /人 | eVTOL i 的载客容量 |
| eVTOLs间碰撞风险的概率 | |
| /元 | 第i阶阶梯电价 |
| 决策变量当eVTOL i 需要在起降场 j 充电时为1,否则为0 | |
| /m2 | eVTOL i 螺旋桨面积 |
| /架 | 不满足与eVTOL i间起降安全时间间隔的飞机数量 |
| /人 | eVTOL i 在起降场 j 服务旅客数量 |
| /s | 时隙长度 |
| 起降场i与j所在地区景区人流量总和 | |
| 起降场i与j所在地区交通枢纽客流量总和 | |
| /h | 时间长度 |
| /(kW·h) | 第i阶阶梯电价的耗电范围 |
| 时刻 | |
| 起降场i与j之间票价 | |
| /(km·h-1) | eVTOL速度 |
| /架 | 起降场i 可容纳eVTOL同时起降数量 |
| /m2 | eVTOL i 机翼面积 |
| /m | eVTOL i 翼展 |
| /m | eVTOL飞过的地面或空中距离 |
| /(°) | 爬升角 |
| /% | 安全预留电量百分比 |
| /% | eVTOL在高峰时刻最少需要满足总需求的百分比 |
| /% | 动力系统效率 |
| /(°) | 进近角 |
| /(°) | 离港角 |
| /(h) | 旅客最大容忍等待时间 |
| 需求i占总需求量的权重 | |
| /(kg·m-3) | 干空气密度 |
1.2 问题描述与假设
1.3 模型构建
1.3.1 阶段1:旅客需求预测模型
1.3.2 阶段2:联合优化调度模型
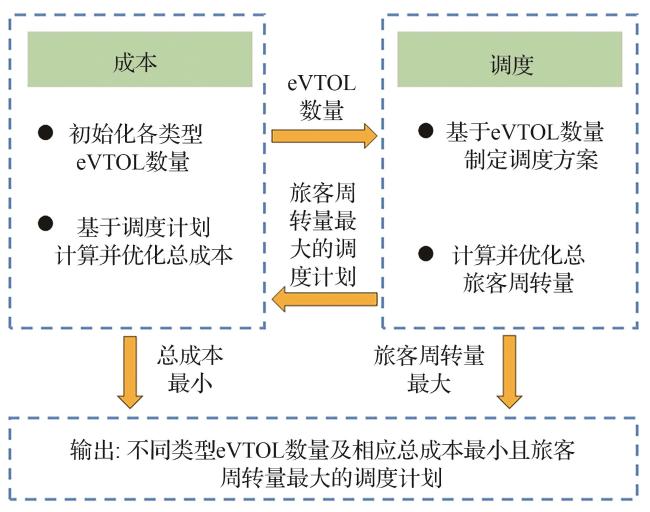
1.4 JOCS算法设计
| |
|---|
| 输入: 起降场间距离 , 安全时间间隔 , eVTOL种类数量 , 充电功率 , eVTOL 性能参数, 运营时间 , |
| For i ∈ 成本优化算法迭代次数do |
| 初始化不同型号eVTOL数量 |
| For i ∈ 调度算法迭代次数do |
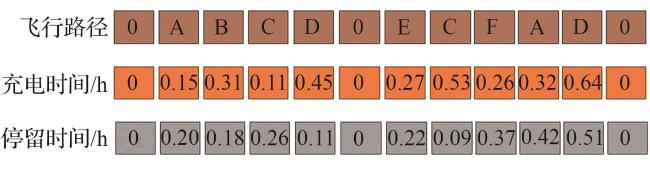
| 基于各种eVTOL的数量初始化调度方案 (图3) |
| If 不满足约束条件式(40)~ |
| 修正此调度方案下的3条性状 |
| end if |
| 根据 |
| If 总周转量>历史最大周转量 |
| 最佳调度方案=当前调度方案 |
| 最大服务人数=当前总服务人数 |
| end if |
| 更新航班时刻表 |
| end for |
| If 满足约束条件 |
| 基于式(10)~ |
| else |
| 总成本=inf |
| end if |
| If 总成本<最小成本 |
| 最小成本=当前总成本 |
| end if |
| 更新不同种类eVTOL的数量 |
| End for |
| 输出:不同种类eVTOL数量, 时刻表与充电需求 |
| |
|---|
| 输入: 起降场间距离 , 安全时间间隔 , eVTOL种类数量 , 充电功率 , eVTOL 性能参数, 运营时间 , |
| For i = 1: eVTOL数量 |
| *+ (设置初始离港时间) |
| While |
| 从A, B, C, D, E, F 中随机选择起降场作为初始起飞地点 |
| 随机从A, B, C, D, E, F中选择与初始起降场满足距离限制 与能量限制 |
| If |
| 对 eVTOL充电至满足 |
| End if |
| 根据 |
|
|
| 确定不满足 的eVTOL数量(高峰时段选择较 高 ,低谷时段选择较低值如 |
| While 数量> e |
|
|
| 再次确定不满足 的数量 |
| End While |
|
|
| 将经过的起降场, , 写入航班计划见图2 |
| End while |
| End for |
表2 调度与成本优化算法中参数取值Table 2 Algorithm parameters of schedule and cost optimization algorithm |
| 算法 | 参数 | 数值 |
|---|---|---|
| 成本优化算法 | 迭代次数 | 50 |
| eVTOL配置的样本量 | 10 | |
| 惯性权重 | 0.8 | |
| 个体学习因子 | 1.7 | |
| 社会学习因子 | 1.5 | |
| 调度优化算法 | 迭代次数/次 | 50 |
| 航班计划样本量/架 | 10 | |
| 惯性权重 | 0.5 | |
| 个体学习因子 | 1 | |
| 社会学习因子 | 1.2 |
2 案例分析
2.1 参数设置
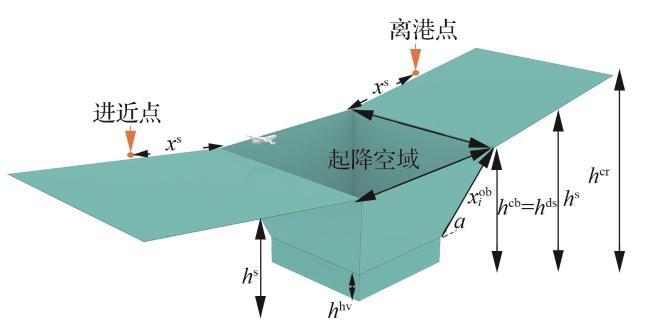
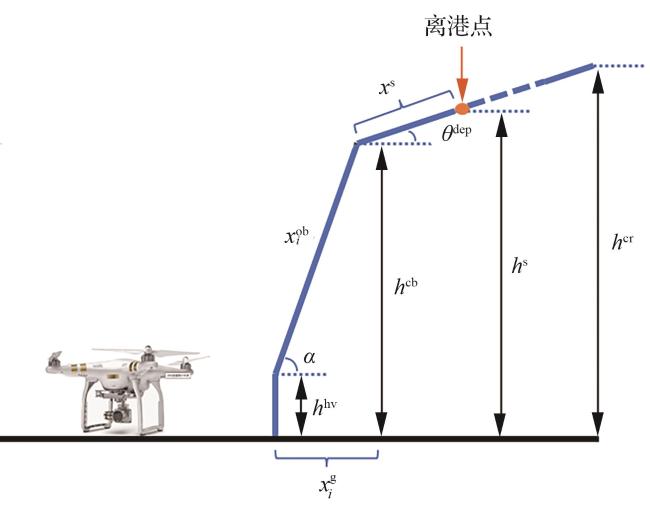
2.1.1 空域、起降程序参数设置
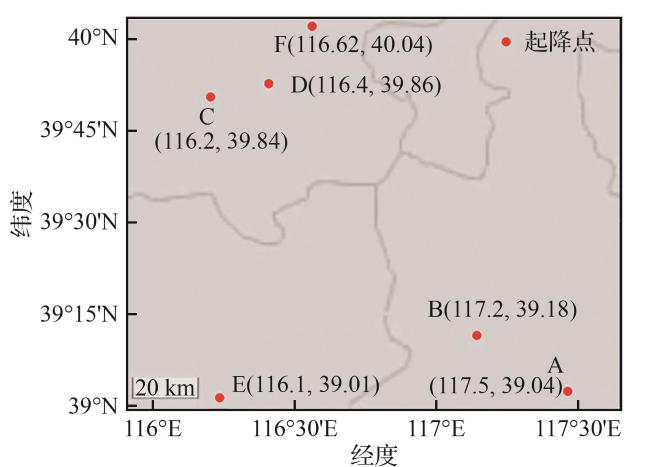
表3 起降场间距离 (km)Table 3 Distance between vertiports |
| 起降场 | A | B | C | D | E | F |
|---|---|---|---|---|---|---|
| A | 0 | 30.20 | 142.74 | 132.05 | 134.44 | 120.98 |
| B | 30.20 | 0 | 112.89 | 102.93 | 107.59 | 96.79 |
| C | 142.74 | 112.89 | 0 | 17.39 | 40.12 | 92.69 |
| D | 132.05 | 102.93 | 17.39 | 0 | 24.64 | 99.04 |
| E | 134.44 | 107.59 | 40.12 | 24.64 | 0 | 121.26 |
| F | 120.98 | 96.79 | 92.69 | 99.04 | 121.26 | 0 |
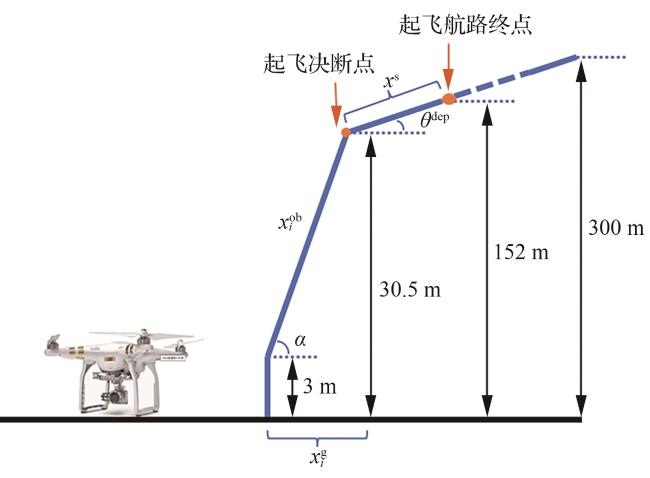
表5 不同型号eVTOL高度层分配Table 5 Altitude assignment to different eVTOLs |
| eVTOL 型号 | 高度层/m | 飞行方向 |
|---|---|---|
| Geely Aerofugia AE200 | 750~1 000 | 字母代码靠前飞往靠后(A-F) |
| 500~750 | 字母代码靠后飞往靠前(F-A) | |
| EHang 216-S | 400~500 | 字母代码靠前飞往靠后(A-F) |
| 300~400 | 字母代码靠后飞往靠前(F-A) |
2.1.2 eVTOL性能参数
| 参数 | EHang 216-S | Geely Aerofugia AE200 |
|---|---|---|
| 电池容量 /(kW·h) | 140 | 250 |
| 购置价格 /元 | 1×106 | 2×106 |
| 升力系数 | 1.5 | 1.5 |
| 机翼展弦比 | 7.0 | 7.0 |
| 翼展 /m | 6.05 | 14.5 |
| 机翼面积 /m2 | 22.94 | 60.10 |
| 螺旋桨面积 /m2 | 62.83 | 435.50 |
| 最大起飞重量 /kg | 220 | 2 500 |
| 优值系数 | 0.75 | 0.75 |
| 最大巡航高度 /m | 500 | 1 000 |
| 巡航速度 /(km·h-1) | 130 | 264 |
| 奥斯瓦尔德效率因子 | 0.85 | 0.85 |
| 乘客最大容量 /人 | 2 | 5 |
| 最大航程 /km | 80 | 200 |
| 推进系统效率 | 0.85 | 0.85 |
2.1.3 运营参数
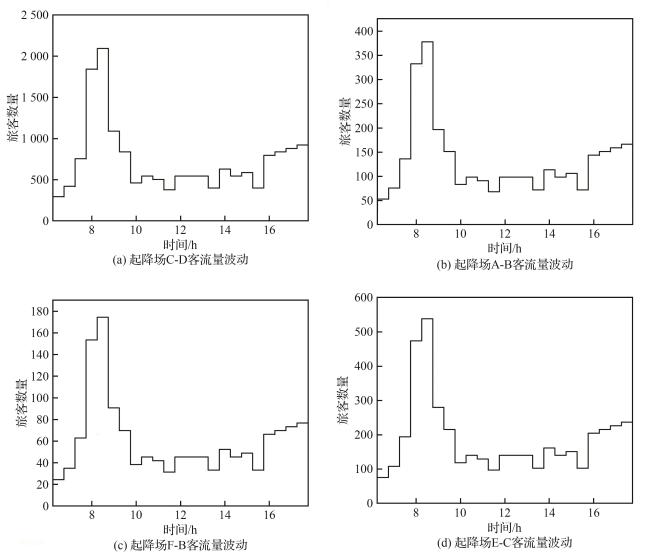
图 7 各起降场间乘客需求随时间变化曲线Fig.7 Curves of passenger demand over time between location of vertiports |
表7 各起降场间旅客需求Table 7 Passenger demand between different vertiports |
| 起降场 | A | B | C | D | E | F |
|---|---|---|---|---|---|---|
| A | 0 | 3×103 | 3.7×103 | 3.6×103 | 1.4×103 | 800 |
| B | 3×103 | 0 | 4.2×103 | 4×103 | 3.4×103 | 1.9×103 |
| C | 3.7×103 | 4.2×103 | 0 | 1.7×104 | 1.1×103 | 4.3×103 |
| D | 3.6×103 | 4×103 | 1.7×104 | 0 | 1.2×103 | 3.9×103 |
| E | 1.4×103 | 3.4×103 | 1.1×104 | 1.2×104 | 0 | 1.4×103 |
| F | 800 | 1.9×103 | 4.3×103 | 3.9×103 | 1.4×103 | 0 |
2.2 实验与分析
2.2.1 经济成本分析
表8 不同配置方案下总成本与周转量Table 8 Cost and served demand of different eVTOL configurations |
| 配置方案 | 第1天运行成本/ (108 元) | 寿命周期内总成本/ (1010 元) | 第1天运行周转量/ 103 | 寿命内总周转量/ 108 | 人均成本/元 |
|---|---|---|---|---|---|
| 170 EHang 216, 177 Geely Aerofugia AE200 | 5.98 | 3.44 | 2.3 | 1.24 | 277.53 |
| 264 EHang 216, 268 Geely Aerofugia AE200 | 9.64 | 5.55 | 3.3 | 1.81 | 306.62 |
2.2.2 调度结果分析
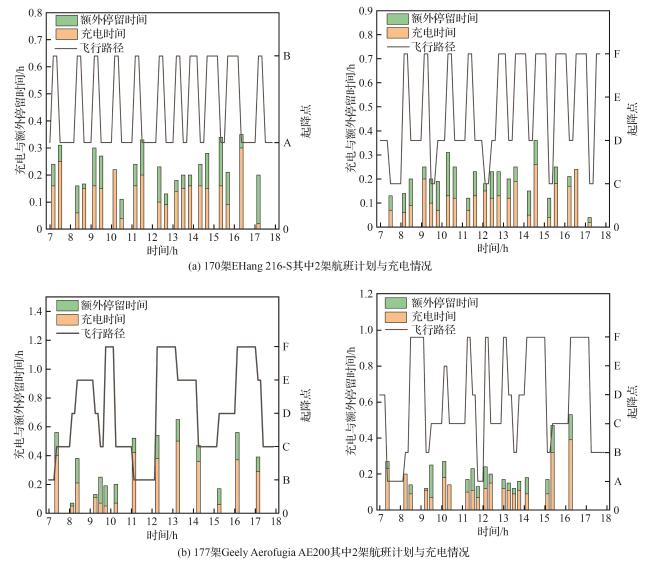
表9 各起降场充电需求Table 9 Charging demand of various vertiports |
| 起降场 | 总电量需求/(105 kW·h) | 充电成本/(104 元) |
|---|---|---|
| A | 1.4 | 6.8 |
| B | 9.5 | 52 |
| C | 27 | 180 |
| D | 24 | 150 |
| E | 10 | 59 |
| F | 27 | 170 |
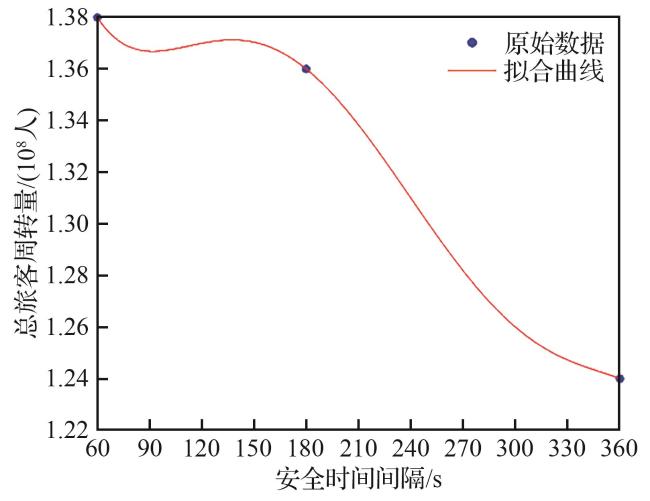
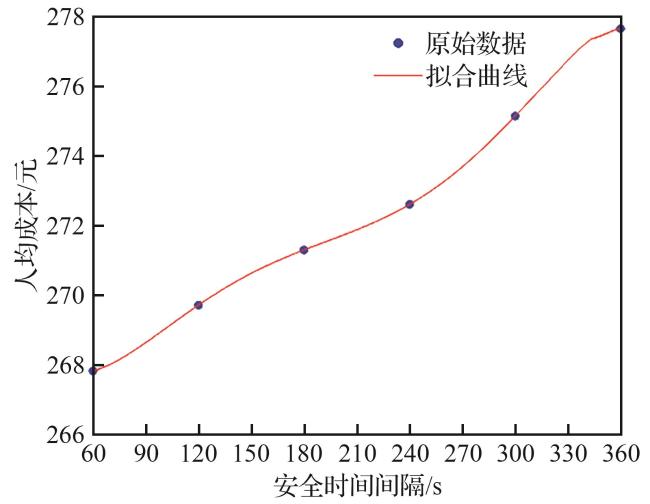
2.2.3 安全裕度分析
表10 不同安全裕度下所需eVTOL数量、总成本与人均成本情况Table 10 Number of eVTOLs and total cost needed under different safety time intervals |
| 安全时间间隔/s | EHang 216-S 数量/架 | Geely Aerofugia AE200数量/架 | 寿命内总成本/(1010 元) | 寿命内总周转量/108 | 人均成本/元 |
|---|---|---|---|---|---|
| 60 | 166 | 208 | 3.696 1 | 1.39 | 266.66 |
| 180 | 149 | 180 | 3.689 9 | 1.36 | 270.48 |
| 360 | 170 | 177 | 3.443 3 | 1.24 | 277.53 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
2.3 模型算法比较
表11 不同模型考虑约束及结果Table 11 Restrictions considered in different models and their corresponding results |