面向桁架抓持的三分支机器人构型优化方法
Configuration optimization method of three-branch robot for truss holding
面向桁架抓持的三分支机器人构型优化方法 |
| 王一帆, 郭喜云, 贾世元, 陈钢, 任默 |
|
Configuration optimization method of three-branch robot for truss holding |
| Yifan WANG, Xiyun GUO, Shiyuan JIA, Gang CHEN, Mo REN |
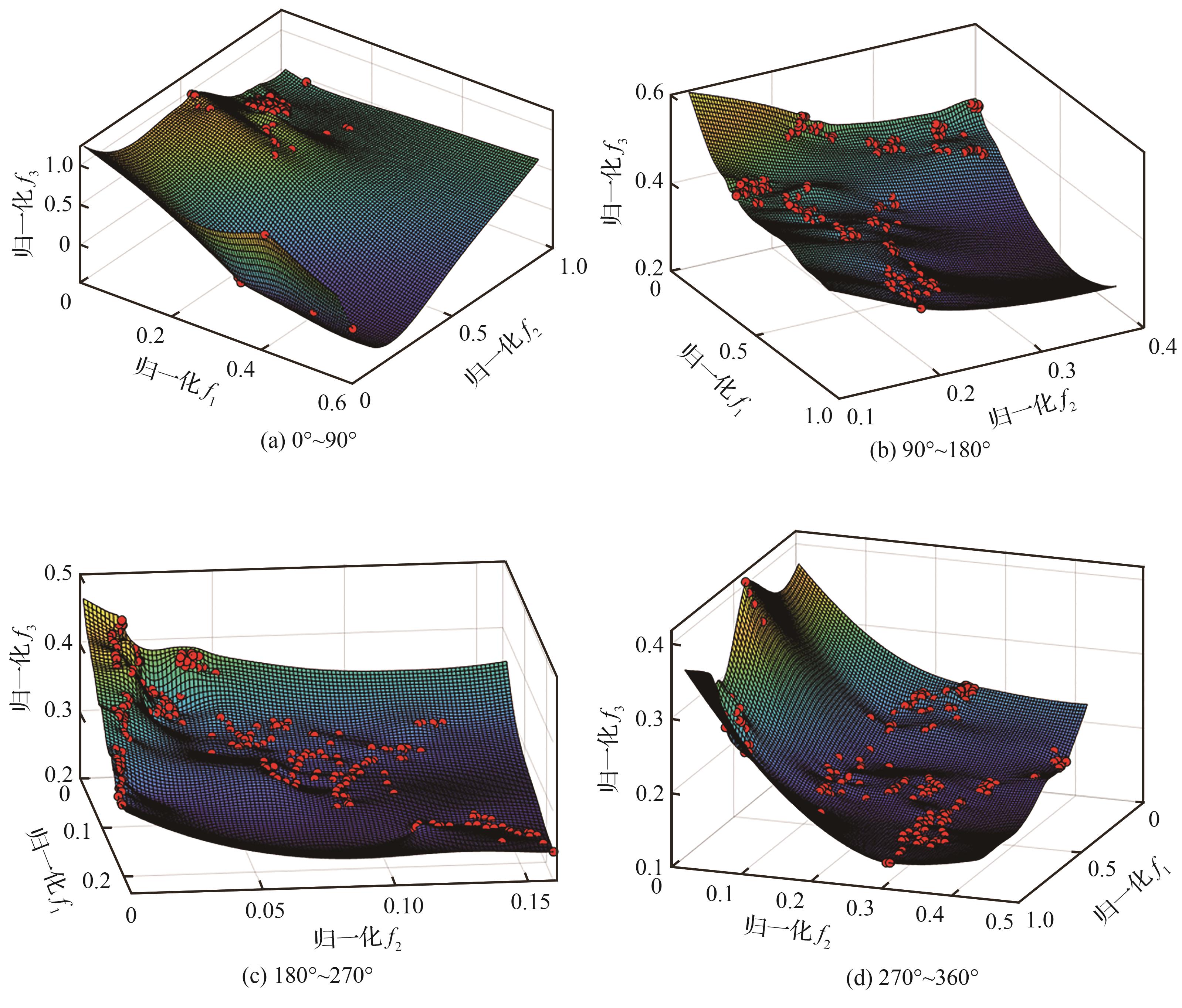
| 图 6 Pareto前沿构型的优化目标值分布曲面图 |
| Fig.6 Surface plot of distribution of optimization objective values for Pareto front configurations |
|
|