ACTA AERONAUTICAET ASTRONAUTICA SINICA ›› 2023, Vol. 44 ›› Issue (1): 26333-026333.doi: 10.7527/S1000-6893.2022.26333
Previous Articles Next Articles
Weihua LI1( ), Junlong GUO1, Liang DING2, Haibo GAO2
), Junlong GUO1, Liang DING2, Haibo GAO2
Received:2021-09-07
Revised:2021-10-09
Accepted:2022-01-25
Online:2023-01-15
Published:2022-02-28
Contact:
Weihua LI
E-mail:liweihua@hit.edu.cn
Supported by:CLC Number:
Weihua LI, Junlong GUO, Liang DING, Haibo GAO. State of art and prospects of ground teleoperation technology for lunar rover[J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(1): 26333-026333.

Fig. 1
Teleoperation of Lunokhod-1 and Lunokhod-2[9]

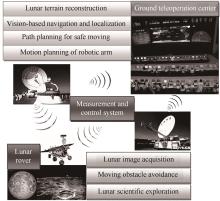
Fig. 2
Teleoperation system of “Jade Rabbit” lunar rover[11]
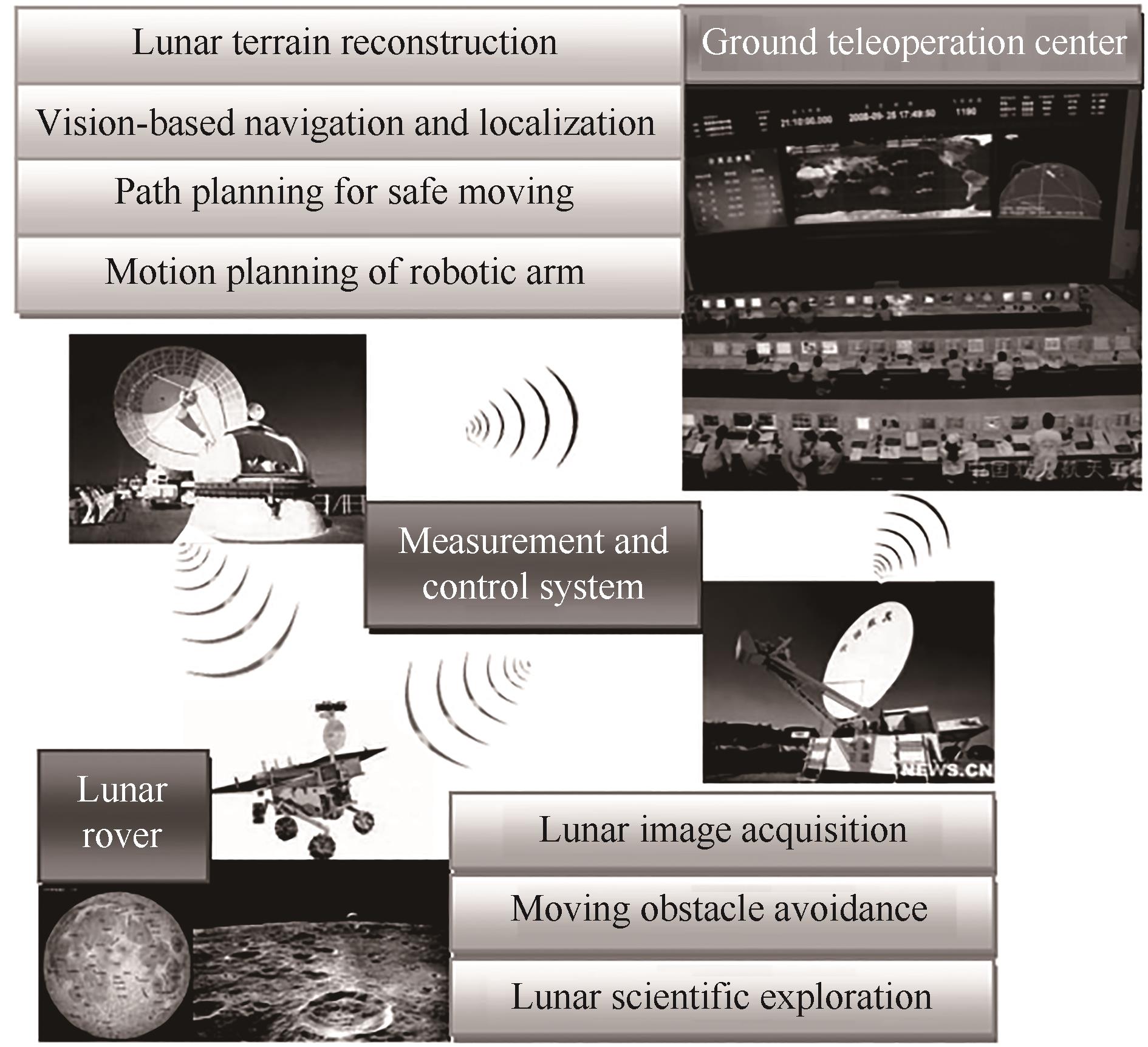

Fig. 3
On-orbit teleoperation of K10 rover by astronaut[14]
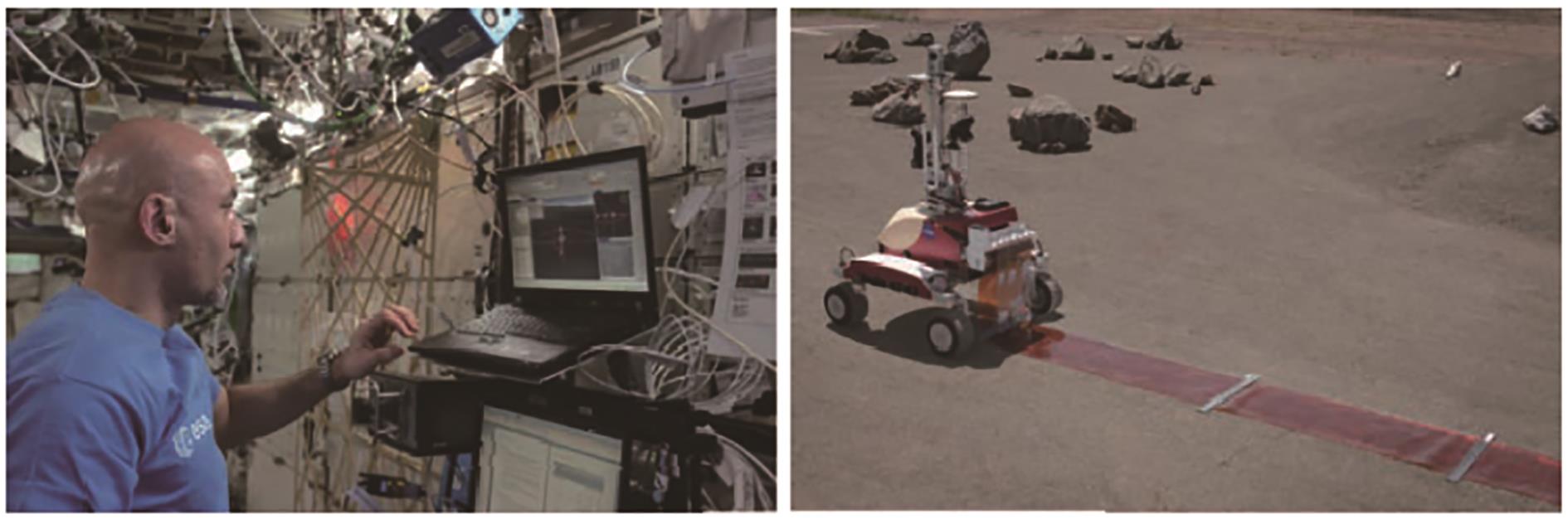
Table 1
Comparison of property of 3 teleoperation modes
| 操作模式 | 通信时延/s | 指令生成 | 操作方式 | 效率 | 安全性 |
|---|---|---|---|---|---|
| 地面 | 3~10 | 离线 | 移动-等待 | 低 | 较高 |
地面+ 器上自主 | 3~10 | 离线+ 局部自主 | 移动-等待 | 中 | 高 |
| 在轨 | <2 | 在线 | 连续 | 高 | 较高 |

Fig. 4
Robot bilateral continuous teleoperation scheme[16]


Fig. 5
Teleoperation scheme of wheeled mobile robot[17]
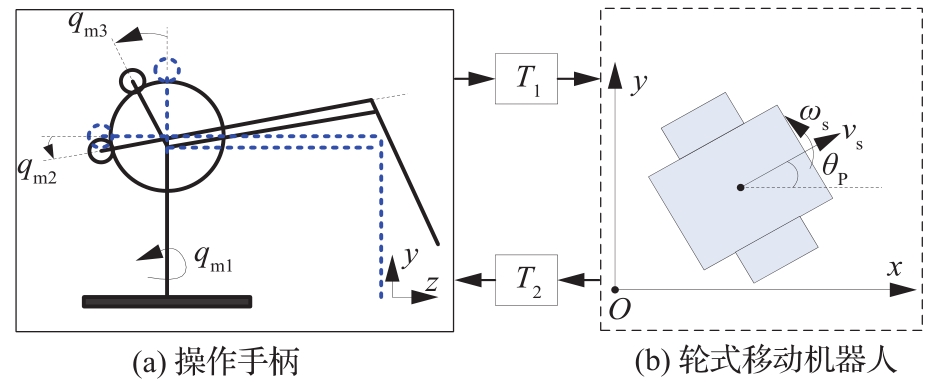

Fig. 6
Bilateral teleoperation of wheeled mobile robot [17]
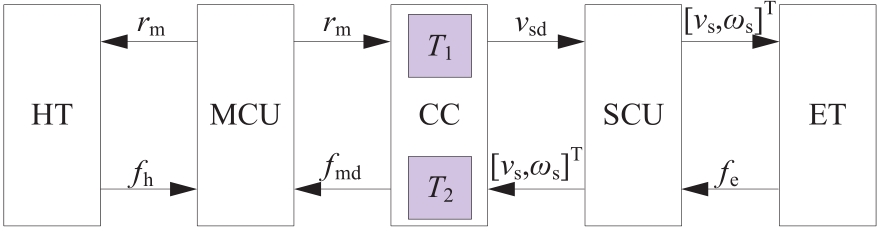
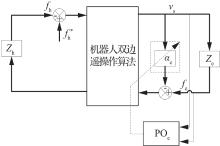
Fig. 7
Robot bilateral teleoperation scheme with TDPC[25]


Fig. 8
DLR mobile manipulator for planetary rover[35]
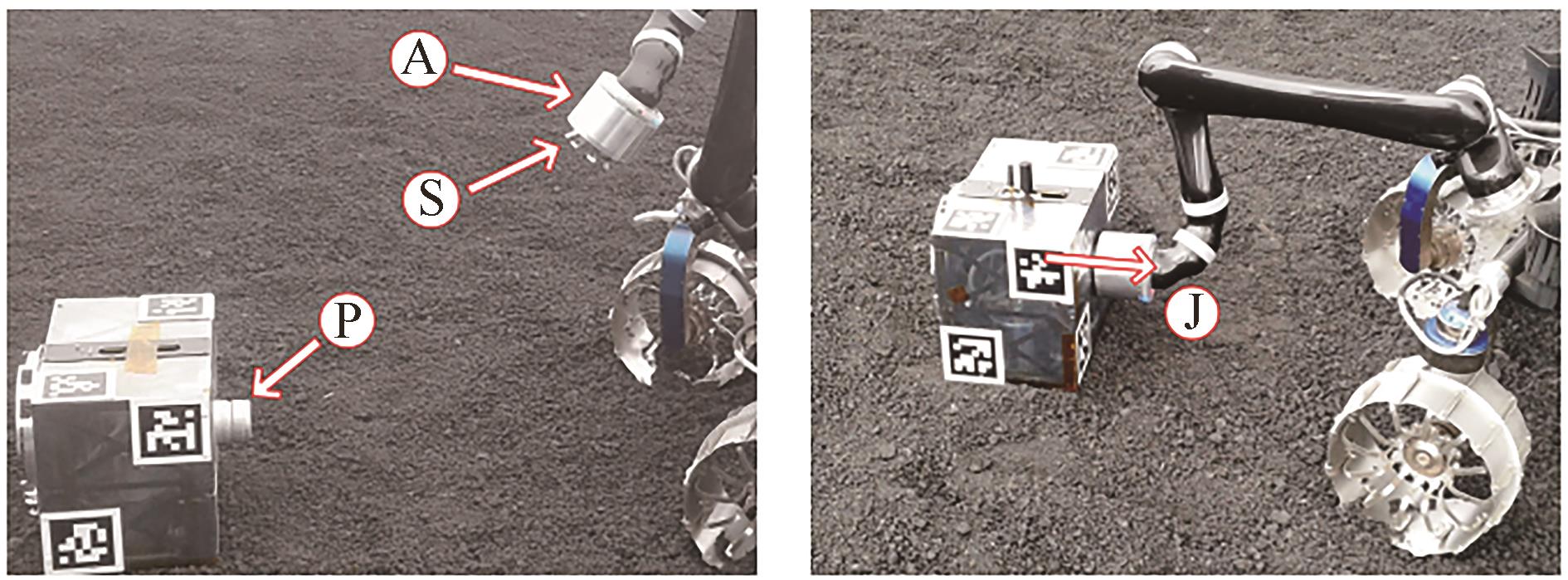
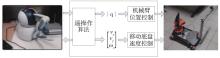
Fig. 9
Scheme of position/velocity hybrid teleoperation of mobile manipulator[36]


Fig. 10
Comparison between single and double operators[39]


Fig. 11
Scheme of wave transformation[47]
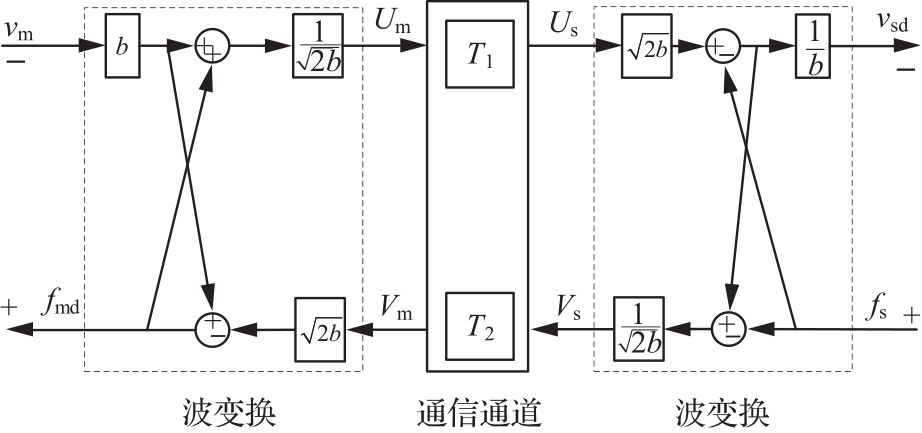

Fig. 12
ROSTDyn simulation platform[72]
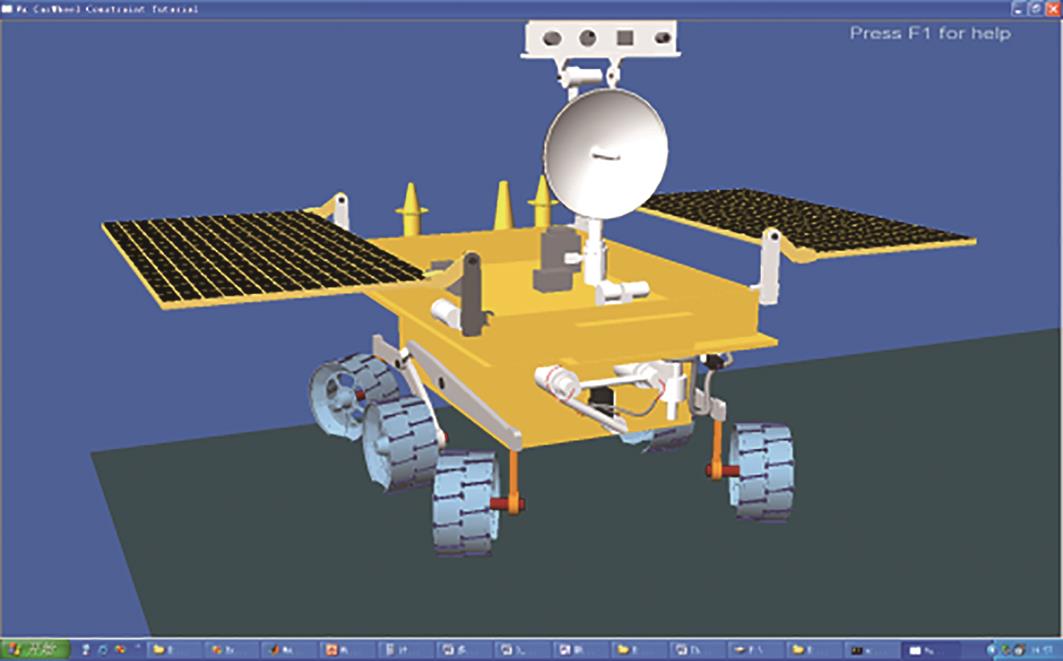

Fig. 13
Simulation of curve walking and turning planning for rover[80]


Fig. 14
Trilateral shared teleoperation scheme with data-driven technology[16]
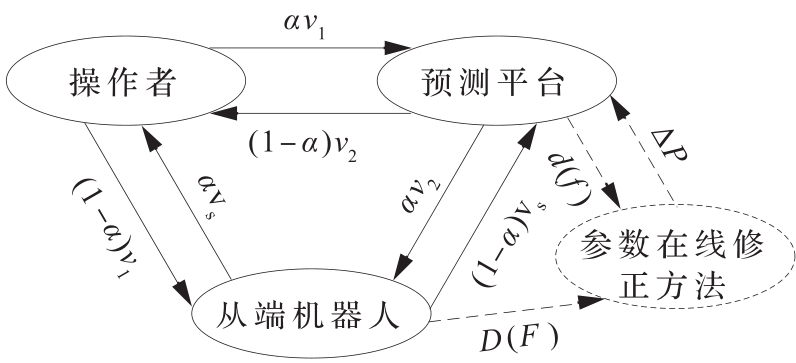
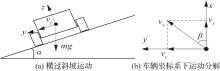
Fig. 15
Lateral motion scheme of lunar rover
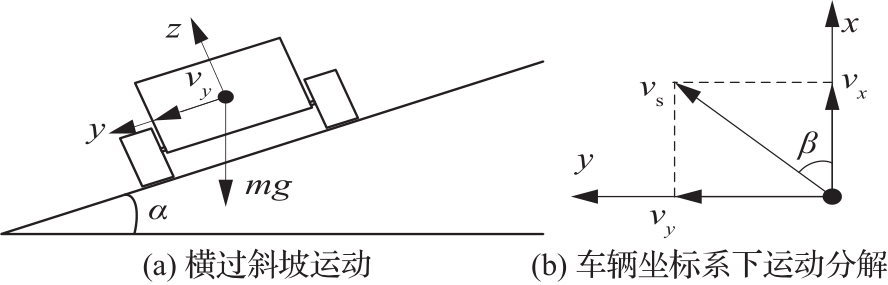
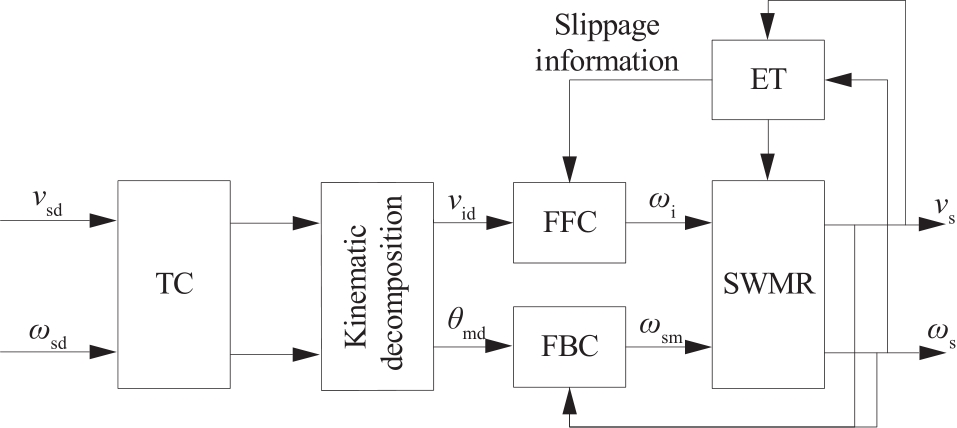
Fig. 16
Teleoperation scheme of six-wheeled lunar rover[86]
| 1 | 徐西宝, 白成超, 陈宇燊, 等. 月/火探测软着陆制导技术发展综述[J]. 宇航学报, 2020, 41(6): 719-729. |
| XU X B, BAI C C, CHEN Y S, et al. A survey of guidance technology for moon/Mars soft landing[J]. Journal of Astronautics, 2020, 41(6): 719-729 (in Chinese). | |
| 2 | 李春来, 刘建军, 左维, 等. 中国月球探测进展(2011—2020年)[J]. 空间科学学报, 2021, 41(1): 68-75. |
| LI C L, LIU J J, ZUO W, et al. Progress of China’s lunar exploration(2011-2020)[J]. Chinese Journal of Space Science, 2021, 41(1): 68-75 (in Chinese). | |
| 3 | TEAM R. Characterization of the Martian surface deposits by the Mars Pathfinder rover, Sojourner[J]. Science, 1997, 278(5344): 1765-1768. |
| 4 | HUNTRESS W T, MAROV M Y. Soviet robots in the solar system: Mission technologies and discoveries[M]. New York: Springer, 2011. |
| 5 | LI C L, WANG C, WEI Y, et al. China’s present and future lunar exploration program[J]. Science, 2019, 365(6450): 238-239. |
| 6 | 吴伟仁, 于登云, 王赤, 等. 嫦娥四号工程的技术突破与科学进展[J]. 中国科学: 信息科学, 2020, 50(12): 1783-1797. |
| WU W R, YU D Y, WANG C, et al. Technological breakthrough and scientific achievement of Chang’e-4 project[J]. Scientia Sinica (Informationis), 2020, 50(12): 1783-1797 (in Chinese). | |
| 7 | PEI Z Y, REN J J, PENG J, et al. Overall scheme trade-off design of Chang’E-5 mission[J]. Journal of Deep Space Exploration, 2021, 8(3): 215-226. |
| 8 | BASILEVSKY A T, KRESLAVSKY M A, KARACHEVTSEVA I P, et al. Morphometry of small impact craters in the Lunokhod-1 and Lunokhod-2 study areas[J]. Planetary and Space Science, 2014, 92: 77-87. |
| 9 | MALENKOV M. Self-propelled automatic chassis of Lunokhod-1: History of creation in episodes[J]. Frontiers of Mechanical Engineering, 2016, 11(1): 60-86. |
| 10 | 杨成, 宋军, 孙军, 等. 月球车实时遥操作方法研究[J]. 中国科学: 信息科学, 2014, 44(4): 461-472. |
| YANG C, SONG J, SUN J, et al. On real-time teleoperation of lunar rover[J]. Scientia Sinica (Informationis), 2014, 44(4): 461-472 (in Chinese). | |
| 11 | 吴伟仁, 周建亮, 王保丰, 等. 嫦娥三号“玉兔号”巡视器遥操作中的关键技术[J]. 中国科学: 信息科学, 2014, 44(4): 425-440. |
| WU W R, ZHOU J L, WANG B F, et al. Key technologies in the teleoperation of Chang’E-3 “Jade Rabbit” rover[J]. Scientia Sinica (Informationis), 2014, 44(4): 425-440 (in Chinese). | |
| 12 | 张立宪, 肖广洲, 王东哲, 等. 在轨对星球表面遥操作技术现状与展望[J]. 中国科学: 技术科学, 2020, 50(6): 716-728. |
| ZHANG L X, XIAO G Z, WANG D Z, et al. Review and prospects of orbit-to-surface teleoperation[J]. Scientia Sinica (Technologica), 2020, 50(6): 716-728 (in Chinese). | |
| 13 | LII N Y, LEIDNER D, BIRKENKAMPF P, et al. Toward scalable intuitive telecommand of robots for space deployment with the METERON SUPVIS Justin experiment [C]∥The 14th Symposium on Advanced Space Technologies for Robotics and Automation. Leiden: European Space Agency, 2017. |
| 14 | BURNS J O, MELLINKOFF B, SPYDELL M, et al. Science on the lunar surface facilitated by low latency telerobotics from a Lunar Orbital Platform-Gateway[J]. Acta Astronautica, 2019, 154: 195-203. |
| 15 | WEBER B, BALACHANDRAN R, RIECKE C, et al. Teleoperating robots from the international space station: Microgravity effects on performance with force feedback[C]∥2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2019: 8144-8150. |
| 16 | 李卫华. 轮式移动机器人滑转率预测及遥操作技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2016. |
| LI W H. Research on slippage prediction and teleoperation of wheeled mobile robots[D]. Harbin: Harbin Institute of Technology, 2016 (in Chinese). | |
| 17 | LI W H, DING L, LIU Z, et al. Kinematic bilateral teledriving of wheeled mobile robots coupled with slippage[J]. IEEE Transactions on Industrial Electronics, 2017, 64(3): 2147-2157. |
| 18 | LEE D J, MARTINEZ-PALAFOX O, SPONG M W. Bilateral teleoperation of a wheeled mobile robot over delayed communication network[C]∥Proceedings 2006 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2006: 3298-3303. |
| 19 | 李振才. 松软地形下六轮星球车运动建模及跟踪控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2018. |
| LI Z C. Research on motion modelling and tracking control of six-wheeled planetary rover on soft terrain[D]. Harbin: Harbin Institute of Technology, 2018 (in Chinese). | |
| 20 | LUO J, LIN Z D, LI Y N, et al. A teleoperation framework for mobile robots based on shared control[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 377-384. |
| 21 | QUANG H V, FARKHATDINOV I, RYU J H. Passivity of delayed bilateral teleoperation of mobile robots with ambiguous causalities: Time domain passivity approach[C]∥2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2012: 2635-2640. |
| 22 | MALYSZ P, SIROUSPOUR S. A task-space weighting matrix approach to semi-autonomous teleoperation control[C]∥2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2011: 645-652. |
| 23 | YUAN W, LI Z J. Brain teleoperation control of a nonholonomic mobile robot using quadrupole potential function[J]. IEEE Transactions on Cognitive and Developmental Systems, 2019, 11(4): 527-538. |
| 24 | 赵素娜. 脑控非完整移动机器人方法研究[D]. 广州: 华南理工大学, 2017. |
| ZHAO S N. Studies on brain-actuated methods for nonholonomic mobile robots[D]. Guangzhou: South China University of Technology, 2017 (in Chinese). | |
| 25 | LI W H, LIU Z, GAO H B, et al. Stable kinematic teleoperation of wheeled mobile robots with slippage using time-domain passivity control[J]. Mechatronics, 2016, 39: 196-203. |
| 26 | HUANG Y J, DING H T, ZHANG Y B, et al. A motion planning and tracking framework for autonomous vehicles based on artificial potential field elaborated resistance network approach[J]. IEEE Transactions on Industrial Electronics, 2020, 67(2): 1376-1386. |
| 27 | 马小陆, 梅宏. 基于改进势场蚁群算法的移动机器人全局路径规划[J]. 机械工程学报, 2021, 57(1): 19-27. |
| MA X L, MEI H. Mobile robot global path planning based on improved ant colony system algorithm with potential field[J]. Journal of Mechanical Engineering, 2021, 57(1): 19-27 (in Chinese). | |
| 28 | DU G L, HAN R G, YAO G C, et al. A gesture- and speech-guided robot teleoperation method based on mobile interaction with unrestricted force feedback[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(1): 360-371. |
| 29 | 袁祖龙, 李会军, 宋爱国, 等. 基于视觉/力觉辅助的遥操作系统研究与实现[J]. 测控技术, 2018, 37(6): 112-116. |
| YUAN Z L, LI H J, SONG A G, et al. Research and implementation of teleoperation system based on visual-haptic aid[J]. Measurement & Control Technology, 2018, 37(6): 112-116 (in Chinese). | |
| 30 | FRANCHI A, SECCHI C, SON H I, et al. Bilateral teleoperation of groups of mobile robots with time-varying topology[J]. IEEE Transactions on Robotics, 2012, 28(5): 1019-1033. |
| 31 | 张颖, 宋光明, 孙慧玉, 等. 多移动机器人双边遥操作系统中反馈力信息设计与研究[J]. 东南大学学报(自然科学版), 2017, 47(1): 50-55. |
| ZHANG Y, SONG G M, SUN H Y, et al. Design and research on feedback force in bilateral teleoperation system for multiple mobile robots[J]. Journal of Southeast University (Natural Science Edition), 2017, 47(1): 50-55 (in Chinese). | |
| 32 | QIU Y, LI B Q, SHI W X, et al. Visual servo tracking of wheeled mobile robots with unknown extrinsic parameters[J]. IEEE Transactions on Industrial Electronics, 2019, 66(11): 8600-8609. |
| 33 | CUI M Y, HUANG R J, LIU H Z, et al. Adaptive tracking control of wheeled mobile robots with unknown longitudinal and lateral slipping parameters[J]. Nonlinear Dynamics, 2014, 78(3): 1811-1826. |
| 34 | 冷舒, 居鹤华. 行星车动力学建模及解算方法综述[J]. 清华大学学报(自然科学版), 2019, 59(9): 689-698. |
| LENG S, JU H H. Review of rover dynamics modeling methods[J]. Journal of Tsinghua University (Science and Technology), 2019, 59(9): 689-698 (in Chinese). | |
| 35 | LEHNER P, BRUNNER S, DÖMEL A, et al. Mobile manipulation for planetary exploration[C]∥2018 IEEE Aerospace Conference. Piscataway: IEEE Press, 2018: 1-11. |
| 36 | PEPE A, CHIARAVALLI D, MELCHIORRI C. A hybrid teleoperation control scheme for a single-arm mobile manipulator with omnidirectional wheels[C]∥2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2016: 1450-1455. |
| 37 | GARCIA M A R, ROJAS R A, PIRRI F. Object-centered teleoperation of mobile manipulators with remote center of motion constraint[J]. IEEE Robotics and Automation Letters, 2019, 4(2): 1745-1752. |
| 38 | WU Y Q, BALATTI P, LORENZINI M, et al. A teleoperation interface for loco-manipulation control of mobile collaborative robotic assistant[J]. IEEE Robotics and Automation Letters, 2019, 4(4): 3593-3600. |
| 39 | MALYSZ P, SIROUSPOUR S. Task performance evaluation of asymmetric semiautonomous teleoperation of mobile twin-arm robotic manipulators[J]. IEEE Transactions on Haptics, 2013, 6(4): 484-495. |
| 40 | ZHAI D H, XIA Y Q. Adaptive fuzzy control of multilateral asymmetric teleoperation for coordinated multiple mobile manipulators[J]. IEEE Transactions on Fuzzy Systems, 2016, 24(1): 57-70. |
| 41 | SHAHBAZI M, ATASHZAR S F, PATEL R V. A systematic review of multilateral teleoperation systems[J]. IEEE Transactions on Haptics, 2018, 11(3): 338-356. |
| 42 | 李文皓, 张珩, 冯冠华. 复杂大时延的多主多从共享遥操作方法[J]. 航空学报, 2021, 42(1): 523896. |
| LI W H, ZHANG H, FENG G H. Cooperative teleoperation for multi-master/multi-slave systems with large time-varying delays[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 523896 (in Chinese). | |
| 43 | ISHIGAMI G, MIWA A, NAGATANI K, et al. Terramechanics-based model for steering maneuver of planetary exploration rovers on loose soil[J]. Journal of Field Robotics, 2007, 24(3): 233-250. |
| 44 | GUO J L, LI W H, DING L, et al. Linear expressions of drawbar pull and driving torque for grouser-wheeled planetary rovers without terrain mechanical parameters[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 8197-8204. |
| 45 | OLSON C F, MATTHIES L H, SCHOPPERS M, et al. Rover navigation using stereo ego-motion[J]. Robotics and Autonomous Systems, 2003, 43(4): 215-229. |
| 46 | ANDERSON R J, SPONG M W. Bilateral control of teleoperators with time delay[J]. IEEE Transactions on Automatic Control, 1989, 34(5): 494-501. |
| 47 | NIEMEYER G, SLOTINE J J E. Telemanipulation with time delays[J]. The International Journal of Robotics Research, 2004, 23(9): 873-890. |
| 48 | PITAKWATCHARA P. Wave correction scheme for task space control of time-varying delayed teleoperation systems[J]. IEEE Transactions on Control Systems Technology, 2018, 26(6): 2223-2231. |
| 49 | 吴超, 宋荆洲. 基于波变量的时域无源双边遥操作控制方法研究[J]. 载人航天, 2020, 26(6): 767-776, 782. |
| WU C, SONG J Z. Research on time domain passive bilateral teleoperation control method based on wave variable[J]. Manned Spaceflight, 2020, 26(6): 767-776, 782 (in Chinese). | |
| 50 | HANNAFORD B. A design framework for teleoperators with kinesthetic feedback[J]. IEEE Transactions on Robotics and Automation, 1989, 5(4): 426-434. |
| 51 | TSUMAKI Y, UCHIYAMA M. Predictive display of virtual beam for space teleoperation[C]∥Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 1996: 1544-1549. |
| 52 | SMITH C, JENSFELT P. A predictor for operator input for time-delayed teleoperation[J]. Mechatronics, 2010, 20(7): 778-786. |
| 53 | 张波, 李海阳, 唐国金. 环月轨道遥操作交会对接预测共享控制[J]. 宇航学报, 2014, 35(3): 315-323. |
| ZHANG B, LI H Y, TANG G J. Predictive shared control of teleoperation rendezvous and docking in lunar orbit[J]. Journal of Astronautics, 2014, 35(3): 315-323 (in Chinese). | |
| 54 | HIRZINGER G, LANDZETTEL K, FAGERER C. Telerobotics with large time delays-the ROTEX experience[C]∥Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’94). Piscataway: IEEE Press, 1994: 571-578. |
| 55 | 倪得晶, 宋爱国, 李会军. 基于虚拟现实的机器人遥操作关键技术研究[J]. 仪器仪表学报, 2017, 38(10): 2351-2363. |
| NI D J, SONG A G, LI H J. Survey on robot teleoperation based on virtual reality[J]. Chinese Journal of Scientific Instrument, 2017, 38(10): 2351-2363 (in Chinese). | |
| 56 | HADDADI A, HASHTRUDI-ZAAD K. Real-time identification of hunt-crossley dynamic models of contact environments[J]. IEEE Transactions on Robotics, 2012, 28(3): 555-566. |
| 57 | 倪得晶. 面向空间机器人遥操作的环境建模与人机交互技术研究[D]. 南京: 东南大学, 2018. |
| NI D J. Research on technology of environment modelling and human-robot interaction for space robot teleoperation[D]. Nanjing: Southeast University, 2018 (in Chinese). | |
| 58 | WALACH E, WIDROW B. The least mean fourth (LMF) adaptive algorithm and its family[J]. IEEE Transactions on Information Theory, 1984, 30(2): 275-283. |
| 59 | YAMAMOTO T, BERNHARDT M, PEER A, et al. Techniques for environment parameter estimation during telemanipulation[C]∥2008 2nd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics. Piscataway: IEEE Press, 2008: 217-223. |
| 60 | SERAJI H, COLBAUGH R. Force tracking in impedance control[J]. International Journal of Robotics Research, 1997, 16(1): 97-117. |
| 61 | DIOLAITI N, MELCHIORRI C, STRAMIGIOLI S. Contact impedance estimation for robotic systems[J]. IEEE Transactions on Robotics, 2005, 21(5): 925-935. |
| 62 | GAO H B, LI W H, DING L, et al. A method for on-line soil parameters modification to planetary rover simulation[J]. Journal of Terramechanics, 2012, 49(6): 325-339. |
| 63 | SU H, QI W, YANG C G, et al. Deep neural network approach in robot tool dynamics identification for bilateral teleoperation[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 2943-2949. |
| 64 | BEKKER M G. Introduction to terrain-vehicle systems[M]. Ann Arbor: University of Michigan Press, 1969 |
| 65 | JANOSI Z, HANAMOTO B. Analytical determination of drawbar pull as a function of slip for tracked vehicle in deformable soils[C]∥Proceedings of the 1st International Conference of ISTVES, 1961: 707-726. |
| 66 | SENATORE C, IAGNEMMA K. Analysis of stress distributions under lightweight wheeled vehicles[J]. Journal of Terramechanics, 2014, 51: 1-17. |
| 67 | AGARWAL S, SENATORE C, ZHANG T N, et al. Modeling of the interaction of rigid wheels with dry granular media[J]. Journal of Terramechanics, 2019, 85: 1-14. |
| 68 | 丁亮. 月/星球车轮地作用地面力学模型及其应用研究[D]. 哈尔滨: 哈尔滨工业大学, 2010. |
| DING L. Wheel-soil interaction terramechanics for lunar/planetary exploration rovers: Modeling and application[D]. Harbin: Harbin Institute of Technology, 2010 (in Chinese). | |
| 69 | SOHL G, JAIN A. Wheel-terrain contact modeling in the ROAMS planetary rover simulation[C]∥Proceedings of ASME 2005 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, 2008: 89-97. |
| 70 | PATEL N, ELLERY A, ALLOUIS E, et al. Rover mobility performance evaluation tool (RMPET): A systematic tool for rover chassis evaluation via application of bekker theory [C]∥The 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation. Noordwijk: European Space Agency, 2004: 1-9. |
| 71 | 陈百超. 月球车新型移动系统设计[D]. 长春: 吉林大学, 2009. |
| CHEN B C. Design of a new locomotion system for lunar rover[D]. Changchun: Jilin University, 2009 (in Chinese). | |
| 72 | LI W H, DING L, GAO H B, et al. ROSTDyn: Rover simulation based on terramechanics and dynamics[J]. Journal of Terramechanics, 2013, 50(3): 199-210. |
| 73 | IAGNEMMA K, KANG S, SHIBLY H, et al. Online terrain parameter estimation for wheeled mobile robots with application to planetary rovers[J]. IEEE Transactions on Robotics, 2004, 20(5): 921-927. |
| 74 | HUTANGKABODEE S, ZWEIRI Y H, SENEVIRATNE L D, et al. Performance prediction of a wheeled vehicle on unknown terrain using identified soil parameters[C]∥Proceedings 2006 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2006: 3356-3361. |
| 75 | DING L, YOSHIDA K, NAGATANI K, et al. Parameter identification for planetary soil based on a decoupled analytical wheel-soil interaction terramechanics model[C]∥2009 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2009: 4122-4127. |
| 76 | LI W H, LIU Z, GAO H B, et al. Soil parameter modification used for boosting predictive fidelity of planetary rover’s slippage[J]. Journal of Terramechanics, 2014, 56: 173-184. |
| 77 | 陶飞, 刘蔚然, 刘检华, 等. 数字孪生及其应用探索[J]. 计算机集成制造系统, 2018, 24(1): 1-18. |
| TAO F, LIU W R, LIU J H, et al. Digital twin and its potential application exploration[J]. Computer Integrated Manufacturing Systems, 2018, 24(1): 1-18 (in Chinese). | |
| 78 | 孟松鹤, 叶雨玫, 杨强, 等. 数字孪生及其在航空航天中的应用[J]. 航空学报, 2020, 41(9): 023615. |
| MENG S H, YE Y M, YANG Q, et al. Digital twin and its aerospace applications[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(9): 023615 (in Chinese). | |
| 79 | 赵正旭. 非可及环境的镜像孪生与实时可视化遥操控[J]. 青岛理工大学学报, 2020, 41(6): 1-16, 60. |
| ZHAO Z X. Twin imaging and real-time visualized remote manipulating in inaccessible environments[J]. Journal of Qingdao University of Technology, 2020, 41(6): 1-16, 60 (in Chinese). | |
| 80 | 金晟毅, 李海飞, 彭松, 等. 嫦娥四号巡视器遥操作地面支持系统设计[J]. 航天器工程, 2019, 28(4): 116-124. |
| JIN S Y, LI H F, PENG S, et al. Design of tele-operation ground support system for Chang’e-4 rover[J]. Spacecraft Engineering, 2019, 28(4): 116-124 (in Chinese). | |
| 81 | 金晟毅, 邓湘金, 郑燕红, 等. 月面采样封装操控系统方案设计与实现[J]. 中国科学: 技术科学, 2021, 51(8): 912-920. |
| JIN S Y, DENG X J, ZHENG Y H, et al. Design and implementation of an operation system for lunar surface soil sampling & encapsulation[J]. Scientia Sinica (Technologica), 2021, 51(8): 912-920 (in Chinese). | |
| 82 | 刘潇翔, 汤亮, 曾海波, 等. 航天控制系统基于数字孪生的智慧设计仿真[J]. 系统仿真学报, 2019, 31(3): 377-384. |
| LIU X X, TANG L, ZENG H B, et al. Smart design and simulation of aerospace control system based on digital twin[J]. Journal of System Simulation, 2019, 31(3): 377-384 (in Chinese). | |
| 83 | LI W H, GAO H B, DING L, et al. Trilateral predictor-mediated teleoperation of a wheeled mobile robot with slippage[J]. IEEE Robotics and Automation Letters, 2016, 1(2): 738-745. |
| 84 | LI W H, YANG N, WANG J F, et al. Kinematic teleoperation of wheeled mobile robot with slippage compensation on soft terrains[J]. IEEE Access, 2019,7: 110982-110991. |
| 85 | LI W H, GUO J L, DING L, et al. Slippage-dependent teleoperation of wheeled mobile robots on soft terrains[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 4962-4969. |
| 86 | LI W H, LI Z C, LIU Y Q, et al. Semi-autonomous bilateral teleoperation of six-wheeled mobile robot on soft terrains[J]. Mechanical Systems and Signal Processing, 2019, 133: 106234. |
| 87 | 梁振杰, 江磊, 苏波, 等. 人机共融机器人的月面驻留服务及应用展望[J]. 载人航天, 2019, 25(5): 680-687. |
| LIANG Z J, JIANG L, SU B, et al. Lunar residence service and application prospect of tri-Co robot[J]. Manned Spaceflight, 2019, 25(5): 680-687 (in Chinese). |
| [1] | Dawei HAN, Shijie ZHENG, Youli TUO, Mingyu GE, Liming SONG, Xinqiao LI, Xiangyang WEN, Shaolin XIONG. Orbit determination analysis using Crab observation data of GECAM mission [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(3): 526641-526641. |
| [2] | Jianling QIAO, Zhonghua HAN, Yulin DING, Wenping SONG, Bifeng SONG. Effects of stratified atmospheric turbulence on farfield sonic boom propagation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2023, 44(2): 626350-626350. |
| [3] | Yifeng HUANG, Shuhua ZENG, Zhongzheng JIANG, Weifang CHEN. Numerical study on high-altitude lateral jet based on nonlinear coupled constitutive relation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(S2): 8-22. |
| [4] | LIU Peidong, JIAO Bohan, DANG Zhaohui. Design method of polygon formation for space-based gravitational-wave detection [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(S1): 726907-726907. |
| [5] | SONG Wei, AI Bangcheng. Multibody separation dynamics: Review [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 25950-025950. |
| [6] | ZHANG Baozhen, WANG Hanping, XU Feng, WU Zhiqing. Simulation speed-up and accuracy compensation measures for adjusting mechanism of variable stator vane [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(9): 226034-226034. |
| [7] | WANG Rui, ZHOU Zhou, GUO Ronghua, HUANG Yuechen. Multi-body dynamics simulation and experiment of solar-powered UAV parachute landing [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 225721-225721. |
| [8] | WU Huisong, LIN Qi, LIU Ting, LIU Zhen, SHI Lu, WANG Xiaoguang. Wire-driven parallel suspension mechanism of virtual flight test model in wind tunnel [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 125758-125758. |
| [9] | LI Yingjie, ZHAO Guang, WU Xueshen, LI Jian, YUAN Wei, MEI Qing. Review of research on self-excited vibration of aviation spline-rotor system [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 625532-625532. |
| [10] | XIAHOU Tangfan, CHEN Jiangtao, SHAO Zhidong, WU Xiaojun, LIU Yu. Model validation metrics for CFD numerical simulation under aleatory and epistemic uncertainty [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(8): 25716-025716. |
| [11] | JI Honglei, SU Junjie, CHEN Renliang, KONG Weihong. Highland atmospheric turbulence model for helicopter flight simulation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(7): 126564-126564. |
| [12] | DU Xiaoqiong, LI Bin, LUO Linyin. Braking vibration behavior of high strut landing gear of amphibious aircraft [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(6): 526199-526199. |
| [13] | MA Yu'e, YANG Meng, SUN Wenbo. Cracking behavior of thermal barrier coating after thermal shock based on perdynamic theory [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(6): 526587-526587. |
| [14] | LI Haiquan, CHEN Xiaoqian, ZHANG Jiatu, WANG Liang. Study on aircraft attitude dynamics under random excitation [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(3): 225232-225232. |
| [15] | LYU Junming, LI Fei, LI Qi, CHENG Xiaoli. Modeling of Martian atmospheric high temperature spectra and prediction of non-equilibrium radiative heating [J]. ACTA AERONAUTICAET ASTRONAUTICA SINICA, 2022, 43(3): 626551-626551. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Address: No.238, Baiyan Buiding, Beisihuan Zhonglu Road, Haidian District, Beijing, China
Postal code : 100083
E-mail:hkxb@buaa.edu.cn
Total visits: 6658907 Today visits: 1341All copyright © editorial office of Chinese Journal of Aeronautics
All copyright © editorial office of Chinese Journal of Aeronautics
Total visits: 6658907 Today visits: 1341